
Исследователи из Лаборатории информатики и искусственного интеллекта Массачусетского технологического института создали роботизированный захват, который способен распутывать тонкие кабели и веревки. Авторы разработки считают, что он будет полезен при выполнении бытовых задач и технических процессов.
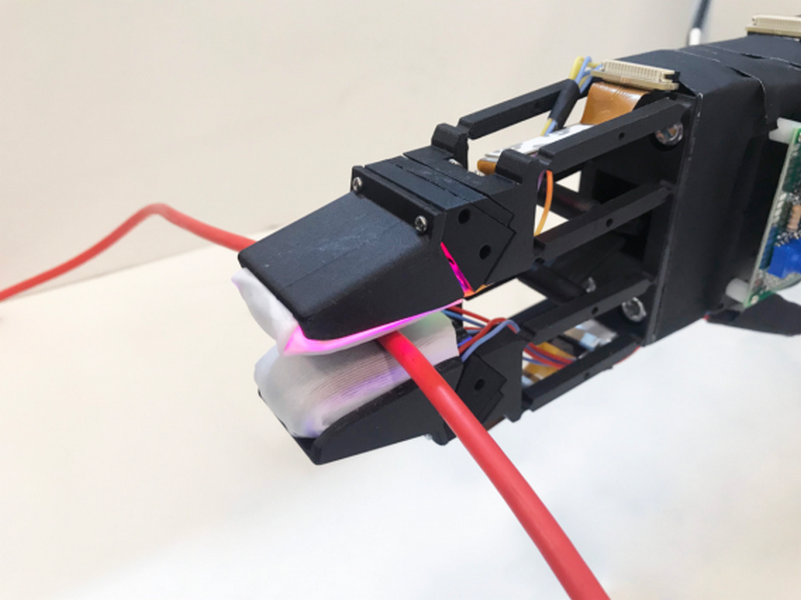
Исследователи создали двухсторонний захват, максимально схожий с пальцами человека. Робопальцы оснащены тактильными датчиками высокого разрешения GelSight, изготовленными из мягкой резины со встроенными камерами. Они установлены на подвижной роборуке. Система имеет два контроллера: один, который модулирует силу захвата, и другой, который регулирует позу захвата для удержания кабеля внутри.

Как отметили авторы разработки, поскольку роботам трудно манипулировать кабелями, для этой задачи требуется, чтобы система обеспечивала плавное скольжение, а также предотвращала утерю кабеля робопальцами.
Робот смог выполнить несколько задач, в том числе найти конец кабеля наушников и подключить его в разъем.
Однако систему предстоит еще немного доработать, прежде чем робот будет готов к широкому использованию. Так, робозахвату было трудно тянуть кабель назад, когда он оказывался на конце робопальца. Исследователи объяснили это формой датчика GelSight, которая изогнута наружу. Сейчас они работают над тем, чтобы отрегулировать форму датчика пальца и улучшить производительность робота.
См. также:


Inobelar
Всё-же "распутать клубок из наушников", и "выпрямив кабель, попасть в разъём" — разные вещи.