

Здравствуйте!
С появлением библиотеки Python Control Systems Library [1], решение основных задач проектирования систем автоматического управления (САУ) средствами Python значительно упростилось и теперь практически идентично решению таких задач в математическом пакете Matlab.
Однако, проектирование систем управления с применение указанной библиотеки имеют ряд существенных особенностей, которых нет в документации [1], поэтому особенностям использования Python Control Systems Librar и посвящена данная публикация.
Начнём с инсталляции библиотеки. В документации говориться о загрузке двух модулей slycot и control, на самом деле для нормальной работы нужна ещё библиотека numpy+mkl, остальные устанавливаются автоматически при загрузке control.
Указанные модули можно скачать с сайта [2]. В документации так же сказано, что для интерфейса по умолчанию нужно просто импортировать контрольный пакет следующим образом: import control.
Однако, при таком импортировании библиотека не работает ни одном из примеров. Для импортирования библиотеки необходимо применить from control import* как и для импортировании окружения matlab: from control. matlab import *[1].
Рассматривать специализированную библиотеку Python Control Systems Library можно только применительно к задачам проектирования систем автоматического управления, поэтому мы так и поступим.
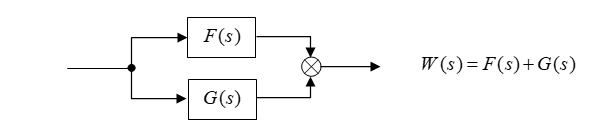
1. Модели соединений систем (функции tf и feedback)
Ввод передаточных функций:
# -*- coding: utf8 -*-
from control.matlab import *
f = tf(1, [1, 1]);
g = tf(1, [2 ,1]);Параллельное соединение блоков или систем:
# -*- coding: utf8 -*-
from control.matlab import *
f = tf(1, [1, 1]);
g = tf(1, [2 ,1]);
w = f + g
print (w)(3 s + 2)/(s^2 + 3 s + 1)Последовательное соединение блоков или систем:

# -*- coding: utf8 -*-
from control.matlab import *
f = tf(1, [1, 1]);
g = tf(1, [2 ,1]);
w = f* g
print (w) 1/(2 s^2 + 3 s + 1)Контур с обратной связью:
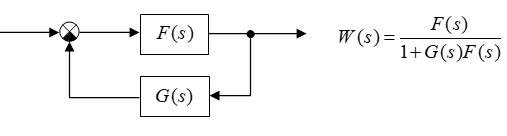
a) Контур с отрицательной обратной связью:
# -*- coding: utf8 -*-
from control.matlab import *
f = tf(1, [1, 1]);
g = tf(1, [2 ,1]);
w = feedback(f, g)
print(w) (2 s + 1)/(2 s^2 + 3 s + 2)б) Контур с положительной обратной связью:
# -*- coding: utf8 -*-
from control.matlab import *
f = tf(1, [1, 1]);
g = tf(1, [2 ,1]);
w = f/(1-f*g)
print(w) (2 s^2 + 3 s + 1)/(2 s^3 + 5 s^2 + 3 s)Вывод:
При помощи функций tf и feedback можно моделировать соединений блоков и систем.
2. Динамические и частотные характеристики систем автоматического управления (САУ)
Зададим передаточную функцию САУ:

Найдем ее динамические и частотные характеристики:
# -*- coding: utf8 -*-
from control.matlab import *
""" Создадим LTI-объект с именем w, для этого выполним:"""
num= [1., 2.]
den= [3., 4., 5.,3]
w= tf(num, den)
""" Найдем полюса и нули передаточной функции с использованием команд pole, zero"""
print('Передаточная функция САУ : \n %s'%w)
print("Полюса: \n %s"%pole(w))
print("Нули:\n %s -\n "%zero(w))
Передаточная функция САУ:
( s + 2)/(3 s^3 + 4 s^2 + 5 s + 3)Полюса:
-0.26392546+1.08251346j
-0.26392546-1.08251346j
-0. 80548241+0.j
Нули: -2Построим переходную функцию командой step(w):
# -*- coding: utf8 -*-
from control.matlab import *
import matplotlib.pyplot as plt
""" Создадим LTI-объект с именем w, для этого выполним:"""
num= [1., 2.]
den= [3., 4., 5.,3]
w= tf(num, den)
y,x=step(w)
plt.plot(x,y,"b")
plt.title('Step Responsse ')
plt.ylabel('Amplitude')
plt.xlabel('Time(sec)')
plt.grid(True)
plt.show()
Построим импульсную переходную функцию командой impulse(w):
# -*- coding: utf8 -*-
from control.matlab import *
import matplotlib.pyplot as plt
""" Создадим LTI-объект с именем w, для этого выполним:"""
num= [1., 2.]
den= [3., 4., 5.,3]
w= tf(num, den)
y,x=impulse(w)
plt.plot(x,y,"r")
plt.title('impulse Responsse ')
plt.ylabel('Amplitude')
plt.xlabel('Time(sec)')
plt.grid(True)
plt.show()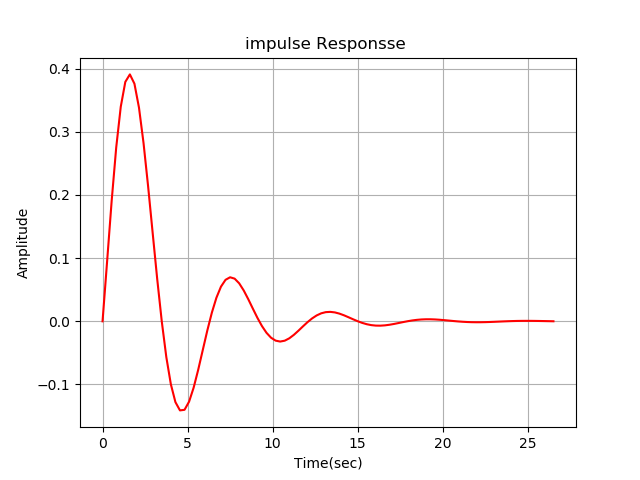
Диаграмму Боде получим используя команду bode(w):
# -*- coding: utf8 -*-
from control.matlab import *
import matplotlib.pyplot as plt
""" Создадим LTI-объект с именем w, для этого выполним:"""
num= [1., 2.]
den= [3., 4., 5.,3]
w= tf(num, den)
mag, phase, omega = bode(w, dB=True)
plt.plot()
plt.show()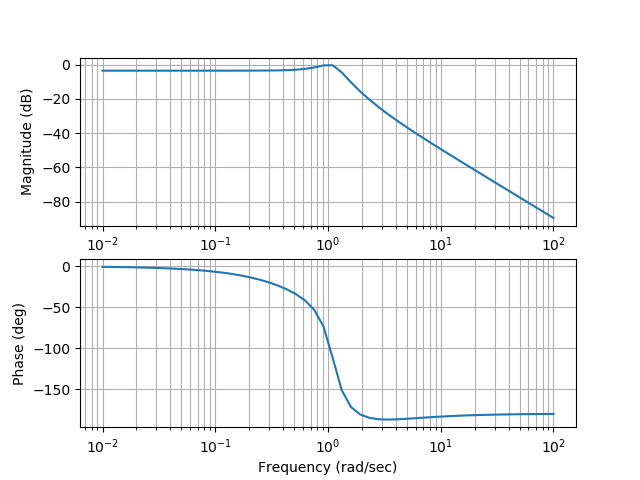
Вывод:
Построение bode диаграммы имеет некоторые особенности, приведенные в листинге.
Построим Найквист-диаграмму командой nyquist(w):
import matplotlib.pyplot as plt
from control.matlab import *
num= [1., 2.]
den= [3., 4., 5.,3]
w= tf(num, den)
plt.title('Nyquist Diagram ')
plt.ylabel('Imaginary Axis')
plt.xlabel('Real Axis')
nyquist(w)
plt.grid(True)
plt.plot()
plt.show()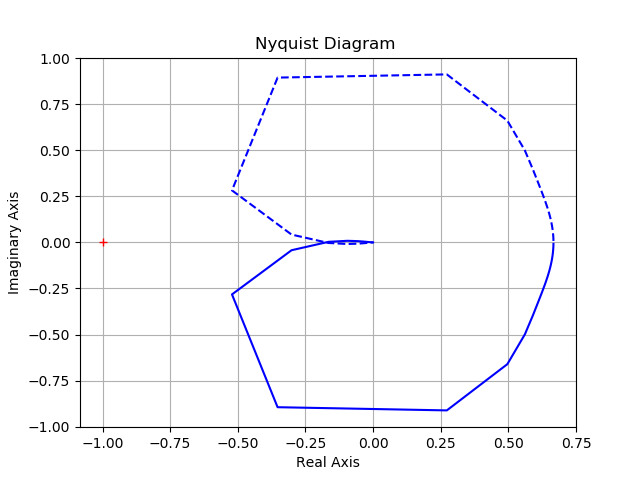
Вывод:
Построение Найквист- диаграммы имеет некоторые особенности, приведенные в листинге.
Мы рассмотрели простые задачи, теперь попробуем совсем немного поднапрячь библиотеку Python Control Systems Library.
3. Найдем дискретную передаточную функцию исполнительного механизма, уравнения состояния которого имеют вид:
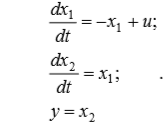 (1)
(1)Для вычисления воспользуемся матричной экспонентой:
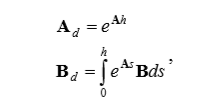 (2)
(2)где h – интервал квантования.
Найдем ее преобразование Лапласа от (2), которое будет равно.
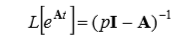 (3)
(3)где I – единичная матрица.
После подстановки в (3) матрицы А получим.
 (4)
(4)Вычислим обратную матрицу.
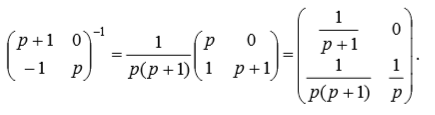 (5)
(5)Откуда, осуществляя z – преобразование последней матрицы, найдем матрицу перехода дискретной системы Ad.
 (6)
(6)где h – интервал дискретизации по времени.
Матрица Bd в соответствии с (2) будет равна.

Тогда дискретный аналог модели исполнительного механизма будет выглядеть:
 (7)
(7)Этот пример на Python Control Systems Library для h=0,1 запишется так:
# -*- coding: utf8 -*-
import matplotlib.pyplot as plt
from control.matlab import *
import numpy as np
A=np.matrix([[-1,0],[1,0]])
B=np.matrix([[1],[0]])
C=np.matrix([[0,1]])
D=0
sn=ss(A,B,C,D)
wd=tf(sn)
print("Непрерывная модель: \n %s"%sn)
print("Передаточная функция \n %s"%wd)
y,x=step(wd)
plt.plot(x,y,"b")
plt.title('Step Responsse ')
plt.ylabel('Amplitude')
plt.xlabel('Time(sec)')
plt.grid(True)
plt.show()
h=1
sd=c2d(sn,h)
print("Дискретная модель : \n %s"%sd)Передаточная функция
1/(s^2+s)

Непрерывная модель:
A = [[-1 0]
[ 1 0]]
B = [[1]
[0]]
C = [[0 1]]
D = [[0]]Дискретная модель:
A = [[0.36787944 0. ]
[0.63212056 1. ]]
B = [[0.63212056]
[0.36787944]]
C = [[0 1]]
D = [[0]]
dt = 1
Вывод:
С использованием библиотеки на Python Control Systems Library получена математическая модель исполнительного механизма, основанная на системе дифференциальных уравнений (1). В модели использованы матричные операторы.
Уверен, что ценителям Python понравиться новая библиотека, существенно расширяющая возможности любимого языка программирования. Однако читатели знают, что любая новая библиотека требует большого труда для её адаптации к реальным задачам и только после этого она становиться востребованной и популярной.
Всем спасибо за внимание!
Ссылки:
1. Python Control Systems.
2. Unofficial Windows Binaries for Python Extension Packages.