

Шутка для нёрдов: если хотите выжить в конце света, затеянном роботами, просто закройте дверь. Роботы много в чём преуспели – точность, скорость, постоянство – но до сих пор не справляются с дверными ручками, и другими простейшими вещами. Часть проблемы состоит в том, что им приходится передвигаться по миру, созданному для людей и для человеческих рук. А рука — это одна из сложнейших механических структур природы.
Однако вскоре машины, судя по всему, смогут и это. Исследователи из Пизанского университета и Итальянского института технологий разработали удивительно простую, и потрясающе ловкую роборуку, известную, как SoftHand 2, работающую всего от двух моторов. Сравните с рукой Shadow Dexterous Hand, гипнотически ловкую, но работающую от 20 моторов. SoftHand обещает роботам, что вскоре у них всё будет схвачено, притом гораздо дешевле.
Как и другие роборуки, SoftHand использует сухожилия в виде тросов, стягивающих пальцы. Но расположены они совершенно по-другому. Вместо кучи тросов, протянутых к каждому пальцу, в руке есть всего один, извивающийся по множеству блоков, расположенных в каждом пальце. Ловкости у неё немного меньше, зато это сильно урезает стоимость и энергопотребление. И это нормально – не существует единой универсальной технологии, подходящей для всех роботизированных манипуляторов. В определённых случаях применение найдут и более сложные роборуки – как найдёт его и SoftHand.
Для создания руки исследователи сначала создали более простую версию SoftHand всего с одним мотором. «Идея в том, что когда вы включаете мотор, длина троса уменьшается, что заставляет её сжимать хватку», — говорит робототеник Косимо Делла Сантина, помогавший в разработке системы.
Отпустите сухожилие, и пальцы вновь распрямятся в раскрытую ладонь, благодаря эластичности сочленений. Это прекрасно работает в случае, когда вам, к примеру, надо схватить мяч. Но поскольку пальцы двигаются синхронно, более тонкие манипуляции руке недоступны.
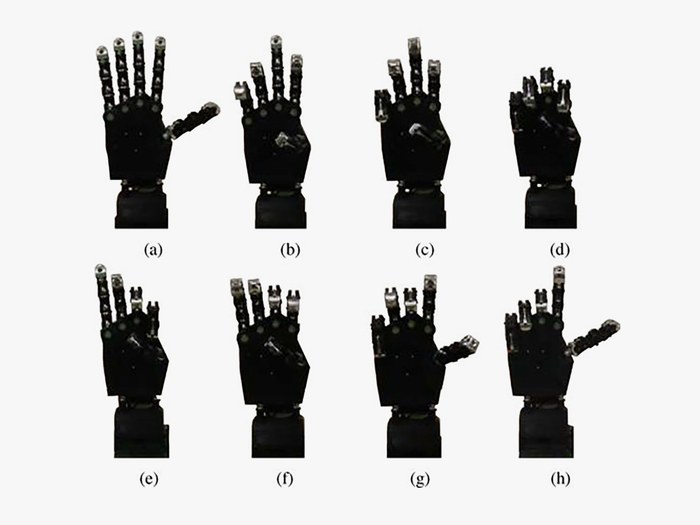
Добавление второго мотора существенно увеличивает ловкость SoftHand 2. Посмотрите на изображение сверху. Каждый конец троса, всё также вьющегося сквозь все пальцы, соединён с одним из двух моторов, расположенных в запястье. Если запустить моторы в одном направлении, трос укорачивается и получаются жесты из верхнего ряда, A, B, C и D – по тому же принципу, что и у SoftHand.
Но если запустить моторы в разные стороны, получается нечто более сложное — E, F, G и H. В данном случае один мотор выпускает трос, а другой выбирает. «Когда трос движется по множеству блоков, натяжение троса не остаётся постоянным», — говорит Делла Сантина.
Если трос вытягивает один мотор, натяжение на ближнем к нему конце будет больше. Если другой мотор отпускает трос, на его конце натяжение будет меньше. Играя натяжением таким способом, можно работать с SoftHand с гораздо меньшим количеством тросов, чем обычно используется в роборуках, и всё же заставлять пальцы шевелиться.
Посмотрите на приведённую анимацию, и вы увидите разницу, которую привносит второй мотор. Слева у руки единственный мотор, справа – их уже два. Первый работает на полную, сжимая все пальцы вокруг мячика. Второй может работать пальцами выборочно, благодаря разнице в натяжении троса. Тот же принцип применяется и с захватом банкноты.
Учитывая наличие всего двух моторов, SoftHand может применять впечатляющий набор манёвров. Она может вытягивать указательный палец, чтобы откинуть задвижку, или сдвинуть со стола лист. Она может даже открутить крышку у банки. И всё это относительно недорого. Ведь чем больше моторов, тем это дороже.
«Чтобы роботы обучались и делали всякие крутые штуки, нам нужны недорогие, надёжные и сложные системы», — говорит робототехник Леррел Пинто из Университета Карнеги-Меллон, разрабатывающий манипуляторы для роботов. «Думаю, что эта их рука предлагает прекрасный компромисс», — добавляет он, но настоящим испытанием станет поиск реального применения такой руки. «Можно ли использовать её для автономного обучения? Насколько она надёжна, выдержит ли она тысячи захватов? На эти вопросы ответов нет».
SoftHand – проект многообещающий, но более сложным роботизированным манипуляторам, вроде Shadow Dexterous Hand, всё равно есть, что предложить. SoftHand может неплохо справляться со стереотипным поведением, типа откручивания крышек у банок, а Shadow со множеством её моторов может лучше адаптироваться для сложных задач.
А SoftHand будет легко справляться с приветствием на кулачках.
Комментарии (8)

0xf0a00
14.09.2018 16:45Роботы много в чём преуспели – точность, скорость, постоянство – но до сих пор не справляются с дверными ручками, и другими простейшими вещами. Имея в наличии огнемет и крупнокалиберный пулемет, проблема открытия дверей и прочие простейшие вещи являются несущественными.
flass
14.09.2018 19:51Это конечно прекрасно, управляя натяжением троса получать различные положения пальцев кисти. Но что если усилие, необходимое для удержания некоего предмета больше чем разница натяжения? Не выравняется ли натяжение по всей длине троса? Не приведёт ли это к одинаковому положению всех пальцев в итоге? Или там ещё есть некие «фиксаторы» для троса, когда нужное положение принято?
NoGodsNoMasters
14.09.2018 19:51+1Мое понимание роботизированных конечностей всегда было основано на отдельном управлении каждой частью этого механизма. Сколько себя помню, еще с далекого детства, с первого терминатора, считал что некорректно управлять всеми суставами одновременно.
Давно пора минимизировать двигатели, либо искать альтернативные варианты.Gryphon88
14.09.2018 21:11Это как игрушка-трансформер: несколько осмысленных положений и сколько-то бесполезных.
rPman
15.09.2018 10:49Пока вариант только — гидравлика, мощная помпа и серия миниатюрных регуляторов, но в любом случае обратную связь тоже никто не отменяет (а это положение и усилие, с которым противодействует окружающий мир)
OldGrumbler
15.09.2018 08:10Сразу приходит в голову идея руки с одним мотором, но независимыми пальцами. У каждого пальца отдельный тросик на сгибание и шкив на общем валу, который крутит мотор. У каждого шкива 2 положения — «свободен» и «сцеплен» — перекидывание простейшим электромагнитом. Не претендую на оригинальность, но это проще перетягивания
удаватроса двумя моторами…
spc
У котика, похоже, такой же захват
