
Идея кажется гениальной: разместить на дроне солнечные батареи, и тогда ему не нужен будет аккумулятор. Без него дроном можно управлять, пока светит солнце. Это прекрасно (предполагая, что ваши намерения чисты). Именно это проделали студенты Сингапурского национального университета.
Но из видео ясно, что их дрон плоский, как лист. Поэтому на самом деле вопрос звучит так: какой массой и размером может обладать такое устройство, чтобы оно смогло подняться в воздух исключительно на солнечной энергии? Я отвечу на этот вопрос и предоставлю вам специальный калькулятор для квадрокоптеров на солнечных батареях.
Солнечная энергия
Мощность – это энергия в единицу времени, измеряемая ваттами. В идеале нужно перенаправить всю энергию с солнечных батарей в полёт. Это значит, что никакого аккумулятора для временного хранения энергии не нужно – и хорошо, потому что он только увеличил бы массу. Но сколько энергии можно выжать из солнечной панели? Это и есть реальная проблема.
Энергетический выход солнечных батарей зависит от следующих величин:
- Мощности Солнца. Мощность солнечной энергии на поверхности Земли равняется примерно 1000 Вт на квадратный метр. Это значение изменить нельзя, не изменив Солнце (что не рекомендуется делать) (Е)
- Размер солнечной батареи. Чем больше батарея, тем больше мощность. Начнём с 0,04 м2 (А)
- Эффективность солнечной батареи. Просто потому, что на панель падает 1000 Вт/м2, не означает, что вся эта энергия превратится в электричество. Мне кажется достоверной цифра в 28% (е)
- Угол ориентации. Лучше, если солнечный свет падает на панель перпендикулярно. Но Солнце, скорее всего, не будет находиться прямо в зените. Как насчёт угла ? = 45°?
В результате мы получим энергетический выход по следующему уравнению:
И это солнечная мощность.
Энергия полёта
Посчитать энергию полёта квадрокоптера немного сложнее. Тем не менее, этот расчёт будет верным для любого летательного аппарата, взлетающего вверх при помощи опоры на воздух.
Начнём с природы сил и движения. Чтобы придать покоящемуся предмету скорость, требуется сила. Размер силы зависит от массы предмета, величины скорости и времени, за которое происходит её изменение. Заменим предмет на воздух – именно его используют наши аппараты для полётов. Реактивную силу можно увеличить, используя большую массу воздуха или большую площадь ротора. Также её можно увеличить, увеличив скорость воздуха.
Моделирование тяги квадрокоптера
Аэродинамику вращающегося несущего винта тривиальной назвать нельзя. Однако такие проблемы не останавливали меня раньше на пути к построению упрощённой модели. В следующей, чрезвычайно упрощённой физической модели, я буду считать, что тяга вертолёта появляется благодаря изменению импульса движущегося вниз воздуха. Чтобы достичь достаточной тяги для полёта вертолёта, у нас есть два способа. Можно взять небольшой винт и очень быстро толкать воздух вниз, или взять большой винт и толкать воздух медленнее.
Если площадь винта А, а плотность воздуха ?, тогда подъёмная сила выражается через скорость воздуха следующим уравнением:
Что насчёт мощности? Мощность – это изменение кинетической энергии воздуха, делённое на временной промежуток. Чем быстрее воздух, тем больше кинетическая энергия и короче временной промежуток. Полный вывод этой формулы я приводил в статье про летательный аппарат на мускульной силе. Вот выражение для мощности.
Поскольку мощность пропорциональна кубу скорости воздуха, для вертолёта на мускульной силе она должна быть маленькой, а, значит, вертолёт должен быть большим. Так и есть.
Теперь к моему любимому графику. Я знал, что моя модель может оказаться абсолютно несостоятельной, поэтому я изучил данные по реальным вертолётам. Исходя из массы и размера винта, можно вычислить мощность полёта и сравнить её с указанной мощностью двигателя. Вот график – вычисленная мощность против указанной мощности для некоторых вертолётов.
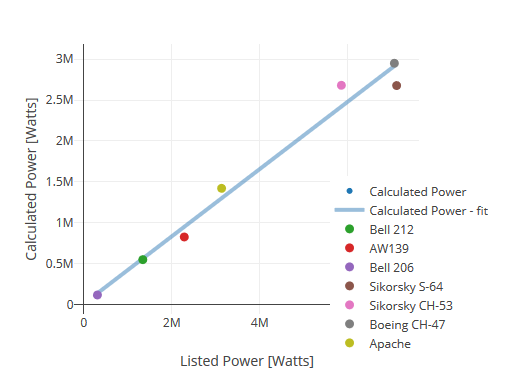
Я был очень удивлён линейности полученных данных.
Больше данных о вертолётах
Один мой друг, увлёкшийся созданием собственного квадрокоптера, показал мне сайт T-Motor, где перечислено множество электромоторов и данных по их эффективности. Вот, какие характеристики там указаны:
- Размер.
- Напряжение.
- Ток.
- Тяга в зависимости от дросселя.
- Скорость вращения.
- Мощность – произведение тока и напряжения.
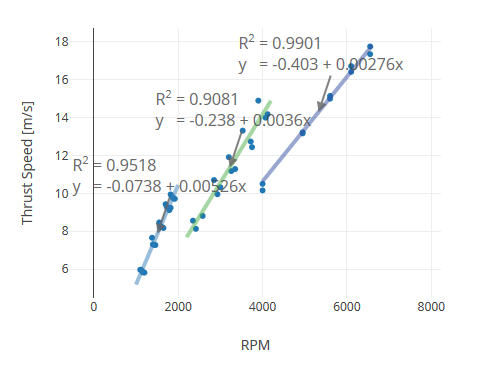
Что можно с этим сделать? Поскольку у меня есть размер и тяга винта, я могу подсчитать скорость воздуха. Её можно использовать для подсчёта теоретической мощности и сравнить с указанной. Вот, что я получил.

Ага. Всё ещё линейная зависимость. Здесь я уже немного поволновался – казалось маловероятным, что моя упрощённая модель тяги вертолёта сработает на таких масштабах. Причём у графиков даже наклон похож – 0,656 и 0,411. Что означает этот наклон? Он означает, что моя расчётная мощность примерно в 2 раза меньше. Если записать мощность, как:
Тогда расчётная мощность совпадёт с указанной. Не уверен, откуда взялась двойка. Возможно, я сделал ошибку, взяв производную при подсчётах средней скорости воздуха.
Если у нас есть данные, можно построить ещё один график, призовой. Зависимость моей расчётной скорости воздуха от скорости вращения винта.
Что это значит? Чем быстрее вращаются лопасти винта, тем быстрее движется воздух. Подозреваю, что тут имеет значение ещё одна переменная – наклон лопастей.
Обратно к солнечной энергии
Но ведь нам не нужна тяга, нам нужна мощность. Увеличение скорости воздуха увеличивает его кинетическую энергию. Чем быстрее увеличивается кинетическая энергия, тем больше для этого требуется мощности.

Это значит, что можно сделать летательный аппарат с небольшими винтами, очень быстро толкающими воздух, или с большим винтом, толкающим воздух медленнее. Но энергия двух этих вариантов разная. Кинетическая энергия пропорциональна квадрату скорости, поэтому меньшему винту требуется гораздо больше энергии для полётов. Поэтому реальный вертолёт на мускульной силе должен быть таким огромным, чтобы ему хватило энергии человека.
Подсчёт мощности полёта
Вместо того, чтобы учитывать все возможные варианты размера квадрокоптера, винтов и солнечных панелей, а также их эффективности, я просто сделал калькулятор – программу на Python, считающую размер винта, необходимого для того, чтобы аппарат летал при заданных параметрах.
С моими первоначальными прикидками я получил диаметр винта равным 5,9 см. Звучит правдоподобно. А все варианты с увеличением массы или изменением размера солнечных панелей теперь можно подсчитать на калькуляторе.
Комментарии (30)

OnYourLips
30.09.2018 13:24+2Прикинул бегло: мощность висения дрона с таким размером пропеллера — 45Вт (при полном весе около 120гр).
Идем на али и смотрим на размеры панели на 50Вт, потом на её вес. Не взлетит. Расхождение теории и практики на порядки.
Дополнительно считаем, что при таком размере сильно увеличивается парусность, и поэтому мощность должны быть в несколько раз выше.hardegor
30.09.2018 17:52+1Так не надо брать первую попавшуюся батарею — они все имеют толстый защитный слой сверху и толстую основу, т.е. никак не оптимизированы по весу.
На видео батарея примерно 2х2 метра.
yarston
30.09.2018 14:21Он означает, что моя расчётная мощность примерно в 2 раза меньше. Если записать мощность, как:
Вероятно, потому что у винта обе стороны работают.
Тогда расчётная мощность совпадёт с указанной. Не уверен, откуда взялась двойка. Возможно, я сделал ошибку, взяв производную при подсчётах средней скорости воздуха.
Zmiy666
30.09.2018 18:01Хм а если дополнить дрон наполненными гелием/водородом элементами? Он станет легче и вполне сможет утянуть солнечную панель, особенно если надувные элементы будут крупными — их можно покрыть солнечными панелями… впрочем выйдет дирижабль на солнечных батареях, что тоже весьма неплохо…
clawham
30.09.2018 18:32ну так дирижопли давно летают и без солнечных панелей только вот они не квадрокоптеры…
на текущий момент вес/токоотдача солнечных панелей недотягивает раза в полтора до минимального требования к мощности висения. винты большие есть очень легкие(чем больше винт тем он больше тяги создаст за меньшее кол-во электричества) моторы весом с грамм и выдающие 40 ватт тоже есть. электроника тоже всего 20 грам весит — мизер. но без буферной батареи и без увеличения раза в два мощности батареи(или уменьшении их веса раза в три) летать на батареях оно не будет — как аэростат с управлением — вполне — но так не чесно.Zmiy666
30.09.2018 23:51Ну предположим у емкости с газом будет фиксированный объем неизменяемый, компенсирующий 90-95% веса и 4 винта вокруг емкости, для движения и взлета. При этом емкость покрыта солнечной панелью. В таком виде квадрик вполне сможет существовать и эффективно выполнять поставленные задачи. Вопрос в том, хватит ли мощности солнечной батареи чтоб скомпенсировать возросшую массу и сильную парусность при полете.
Garbus
30.09.2018 18:41Было бы интересно глянуть на дирижабль, который не требует посадки очень долго. Солнечные панели, электролизер и конденсация влаги из воздуха. Разных вариантов пленочных батарей, пусть с низким КПД но легких, воде бы немало обещали.
Пусть грузовым ему не быть, но связь и съемка, почему бы и нет.
rPman
30.09.2018 18:42Я один ожидал конструкцию, реализованную в виде огромного плоского винта, который ракручивают маленькие двигатели на концах/середине (расположенные под углом)?
Ведь парусность конструкции просто запредельная, и это просто обязательно нужно использовать.vzhicharra
30.09.2018 23:22Тогда это будет не коптер а самолет.
И такой уже естьdron_k
01.10.2018 01:15Похоже rPman имел в виду чтото типа реактивного винта

vzhicharra
01.10.2018 01:30Да, я понял что такое реактивные двигатели на концах лопастей.
Я имел в виду ответ на второй вопрос — что как-то надо использовать парусность солнечных батарей.Gryphon88
01.10.2018 13:43И через простую логическую цепочку в итоге придём к самолёту на солнечных батареях, вопрос только с какой конструкцией, классической, или «летающее крыло».
vasimv
01.10.2018 14:47Прочность нужна будет очень высокая, а это — вес. И стабилизировать непонятно как, делать вертолетный механизм — это, опять же, еще больше механики и требования по прочности… Вы посмотрите как оно себя в воздухе ведет — батареи там едва не рассыпаются. А вы хотите к ним еще и центробежную силу приложить и вес всей конструкции.
biomassa
01.10.2018 17:36Ведь парусность конструкции просто запредельная, и это просто обязательно нужно использовать.
Хорошо подмечено.
Все мы видели как ветер поднимает и кружит в воздухе листы бумаги, куски картона или фанеры…
… а что если не делать тяговых винтов, которые жрут 95% энергии, от слова совсем, а использовать только маломощные-рулевые винты.
Поясню: Нам не надо тянуть конструкцию вверх, это сделает ветер. Достаточно просто наклонять коптер под самый оптимальный угол по отношению к потоку воздуха и все остальное сделает природа. Ставим на коптере, помимо всего прочего, датчики направления и скорости отекающего воздушного потока, путем нехитрых вычислений получаем мощность которую нужно подать на каждый двигатель, чтобы поддерживать ориентацию. При хорошей скорости реакции, остается только слегка корректировать положение летательного аппарата и воздушный поток поднимет наш коптер на нужную высоту.
Самые большие сложности у поверхности земли, из-за порывов или отсутствия ветра, а на средней и большой высоте он есть всегда и достаточно стабилен, так что расходы на балансировку аппарата будут еще меньше.
Так что главное взлететь, а там уже может "плавать" до заката.
Вторая проблема: горизонтальное перемещение. Ветер будет основательно сносить коптер по горизонтали, а ехать за ним за тридевять земель или потерять его нам не улыбается, посему надо сделать то что делали предки — ходить против ветра. Только предки могли вилять в одной плоскости по горизонтали, а мы можем использовать полный 3Д.
Дело за реализацией, но это не ко мне, я простой диванный аналитик.
"Скоро сказка сказывается, да нескоро дело делается". Ждем-с :)
pavel_kudinov
30.09.2018 22:27Так и каков же ответ в итоге?
Насколько большим может быть дрон на солнечных батареях?
alan008
01.10.2018 10:00Лишь бы солнце за тучу не зашло, а то начнётся дронопад :)

litvinenkow
01.10.2018 17:36тут надо уже резервировать, чтобы хоть сесть такое чудо могло
dron_k
01.10.2018 23:33При достаточном размере солнечных батарей можно их использовать как парашют,
или как планер.
При достаточном размере и механизации лопастей можно использовать авторотацию.
Daleko
01.10.2018 17:35я буду считать, что тяга вертолёта появляется благодаря изменению импульса движущегося вниз воздуха
Физики, объясните, пожалуйста: что, вертолёт летает по принципу «реактивной тяги»? Или в данном случае это не важно?Nubus
02.10.2018 07:05Именно по такому принципу он и летает. Как и винтовой самолет. Забираем воздух спереди\верх, выдаем назад\вниз
Daleko
02.10.2018 09:12Если бы винтовой самолет летал по реактивному принципу (как ракета), зачем бы ему были нужны крылья? :) Вы точно физик?
playermet
02.10.2018 12:09Вы оба неправы. Винт конечно не реализует реактивную тягу. Но из вашего утверждения выходит что реактивным самолетам крылья тоже не нужны, что как бы неверно. Тяга придающая самолету ускорение и подъемная тяга — не одно и то же.

artskep
Ну, если вопрос только чтобы висеть над землей на солнечной энергии, есть решения проще :)
https://youtu.be/h89ksLRxtIc
Хотя, конечно, не так технологично
Firz
А главное экономично, пакет для мусора есть в каждом доме.
YouHim
И где найти такой длинный пакет для мусора?
Firz
Именно такой длины не скажу, но любой тонкий и большой мешок для мусора подойдет.