

Заход на посадку и уход на второй круг — по статистике самые опасные этапы полёта.
Давайте разбираться, как это работает, и пользуясь моментом, посмотрим как устроена электронная система управления современным самолётом.
Но перед тем, как мы начнем, я вынужден обозначить эдакий дисклеймер: я действующий пилот Airbus семейства 320, который является самолетом 4-го поколения (отличительный признак которого — наличие технологии Fly-by-Wire). Соответственно, многие специфические системы и процедуры, описываемые в посте, будут привязаны к данному типу. На других типах (например Boeing 737 Classic/NG/MAX, которые являются самолетами предыдущего, 3-го поколения без технологии Fly-by-Wire) процедуры и логика построения и работы систем может значительно различаться. И да, я не имею отношения к инженерно-авиационной службе и службе ОрВД (организации воздушного движения), поэтому уж простите возможные огрехи в описании матчасти.
Итак, приступим.
Краткий ликбез по 4 поколению самолетов (Fly-by-Wire)
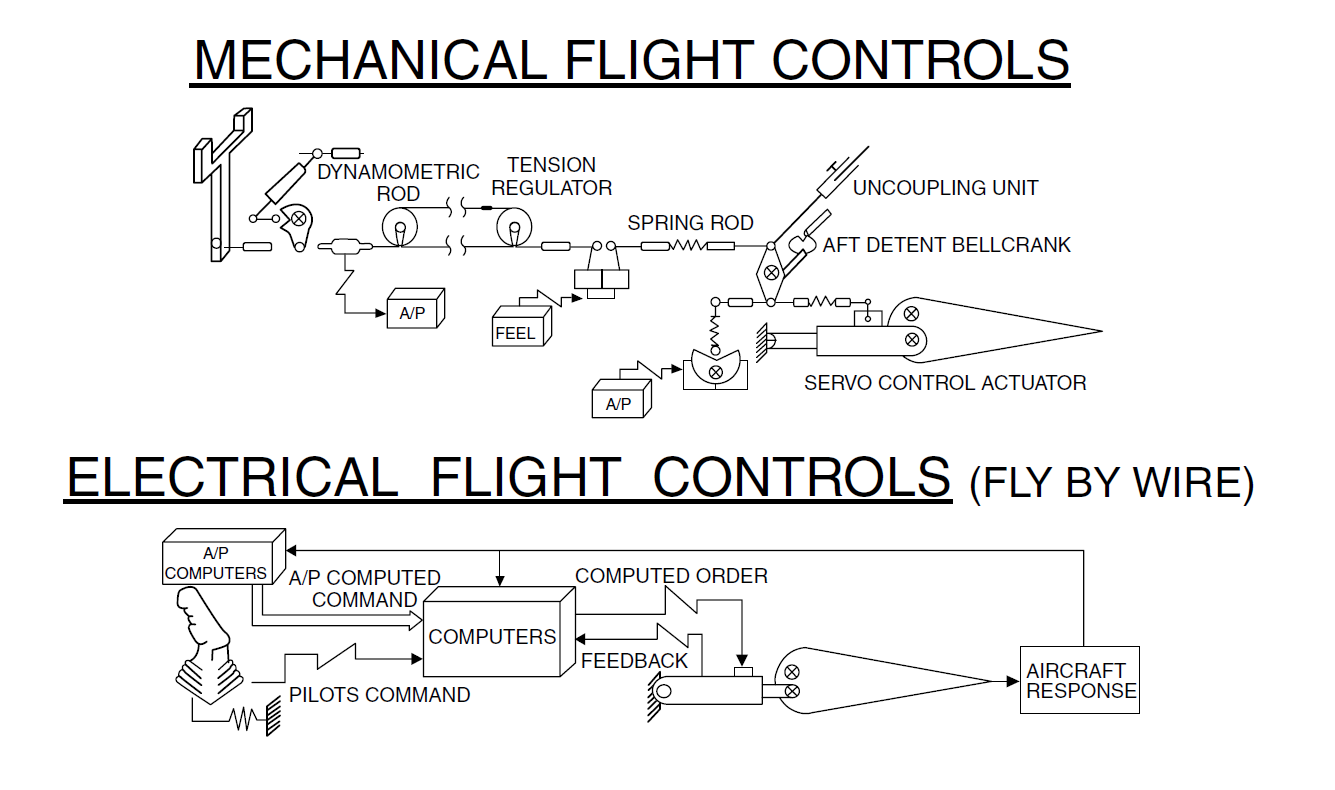
Наверное, многие из вас наслышаны о технологии Fly-by-Wire (ЭДСУ или электродистанционная система управления по-нашему). Если кратко пробежаться по истории развития систем управления самолетом, то это выглядело примерно так:
- прямая механическая связь между штурвалом и аэродинамическими поверхностями (в общем случае это — элеронами, рулем направления, горизонтальным стабилизатором, триммерами и т.д.);
- появление гидроусилитей/бустеров/пружинных загружателей при наличии прямой механической связи;
- электродистанционное управление (Fly-by-Wire/ЭДСУ)
Так чем же хороша система Fly-by-Wire? Давайте посмотрим их в сравнении:
Здесь много интересной информации по теме Fly-by-Wire
В отличии от классической схемы, где прямая механическая связь (пусть даже через отдельные преобразователи) является правилом, в случае Fly-by-Wire данная связь отсутствует (сейчас опустим тонкости типа управления RUDDER’ом или HORIZONTAL STABILIZER’ом напрямую в режиме MECHANICAL BACKUP, это точно тема для отдельной статьи). Т.е. управляющее воздействие на сайдстик (Airbus) или штурвал (Boeing 777) оцифровывается и передается на FLIGHT COMPUTERS. Кстати, в Airbus их – аж целых 7: 2 ELAC’а (Elevator Aileron Computer), 3 SEC’а (Spoilers Elevator Computer), 2 FAC’а (Flight Augmentation Computer). Далее, исходя из закона управления (FLIGHT CONTROL LAW в терминологии Airbus) и множества других параметров полета, компьютеры выдают сигнал на отработку соответствующих гидроприводов, через которые управляющее воздействие передается аэродинамическим поверхностям.
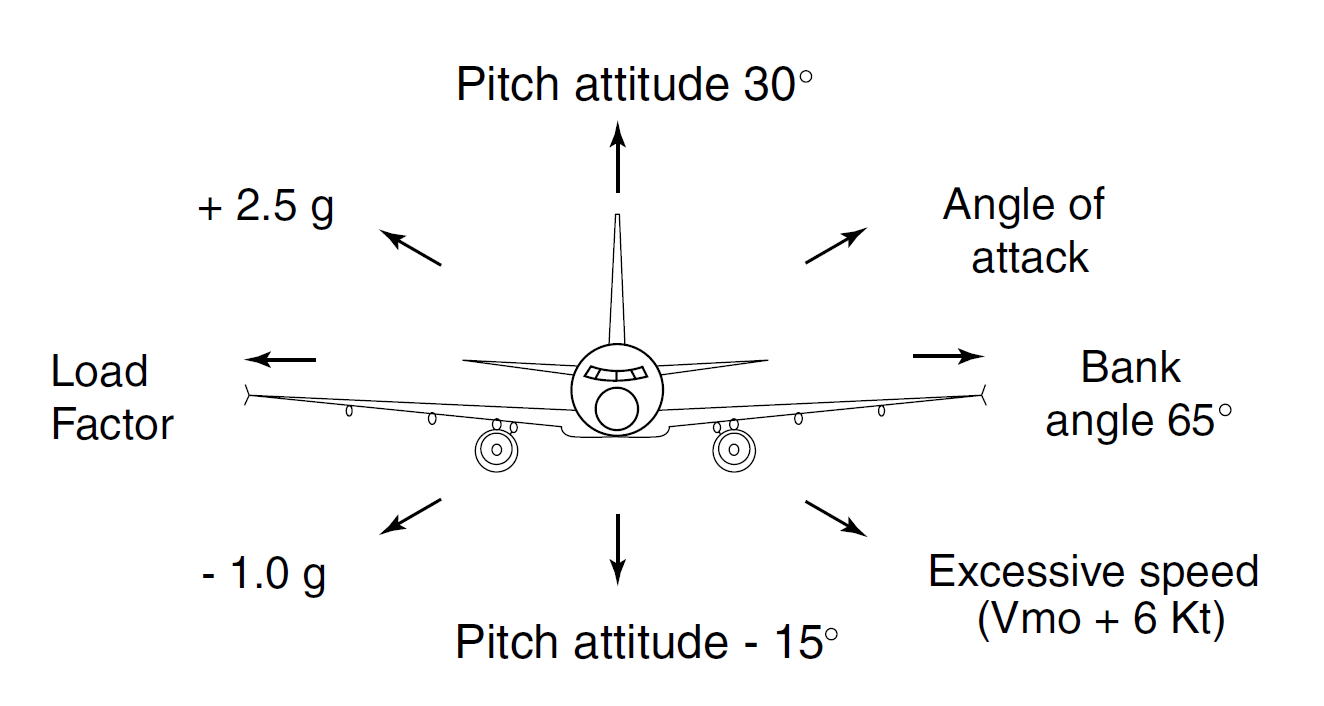
Так в итоге, зачем была придумана система Fly-by-wire? Как ни странно, в первую очередь для повышения безопасности полетов. Но первыми здесь как обычно были военные, которые преследовали несколько иные цели – например создание аэродинамически неустойчивых сверхманевренных самолетов (у нас одним из первых самолетов с ЭДСУ был Су-27, который на дозвуковых скоростях является аэродинамически неустойчивым). Для гражданской авиации – это позволило ввести дополнительную «защиту от дурака» в виде защит (PROTECTIONS в терминологии Airbus), которые обеспечивают дополнительную защиту от попыток вывода самолета из «нормальных» параметров/режимов полета. По своей сути – набор PROTECTIONS это часть закона управления, который является активным в данное время:
PROTECTIONS в NORMAL LAW собственной персоной
Плюс немаловажный момент: сайдстиком в продольном канале пилот задает перегрузку, а в поперечном – угловую скорость разворота (а не крен и тангаж, как в классической схеме управления). При этом самолет будет самостоятельно выдерживать заданные пилотом параметры, сайдстик можно смело отпустить. Это проявление второй причины внедрения fly-by-wire: гарантированная стабильность и управляемость самолета во всем диапазоне «нормальных» параметров полета. Автотриммирование и отсутствие нагрузок на сайдстике/штурвале — это тоже следствие использования технологии fly-by-wire (хотя, если честно — мне лично отсутствие усилий было сначала крайне непривычно).
При выходе за «нормальные» параметры полета (например, при попадании в сложное пространственное положение из-за неправильного обхода засветки) есть закон управления, называемый ABNORMAL ATTITUDE LAW. При этом отключается часть PROTECTIONS (например, нет защиты по перегрузке), уходит автотриммирование, но это сделано для того, чтобы пилот мог максимально эффективно вернуть самолет в «нормальный» режим полета.
Если говорить о Airbus, то в случае наступления отказов разнообразных систем самолета законы управления последовательно деградируют: NORMAL LAW-> ALTERNATE LAW-> DIRECT LAW (здесь самолет из Fly-by-Wire превращается в «классический» самолет предыдущего поколения без защит и автотриммирования, а отклонения управляющих аэродинамических поверхностей прямо пропорциональны отклонению сайдстика)-> MECHANICAL BACKUP (а здесь – остается только прямое управление рулем направления и горизонтальным стабилизатором, но этот режим является скорее «переходным» и не совсем предназначенным для выполнения посадки). Так же и последовательно уменьшается число защит (PROTECTIONS): если в NORMAL LAW самолет имеет защиту по углу тангажа, перегрузке, максимальной скорости полета, углу атаки и углу крена, то данные защиты будут отключатся по мере возникновения отказов систем и деградации законов управления.
К чему я это все рассказал: посадка на самолетах с Fly-by-Wire по технике выполнения очень похожа на то, что мы делаем на классических самолетах, но она имеет определенные особенности, о которых необходимо знать. Более подробно мы все это затронем ниже.
Интересные факты
- Запуск самолета, постоявшего хотя бы сутки в минусовую температуру (а особенно при -20 и ниже) – это еще то развлечение. Пока отсек авионики и самолет более-менее не прогреется, количество сообщений об ошибках работы систем иногда совершенно не радует перед предстоящим полетом.
- Иногда, чтобы устранить ту или иную ошибку, используется RESET отдельных систем при помощи включения-выключения оных (да, это штатный способ, но применяется он далеко не всегда) и/или использования CIRCUIT BREAKER’ов (они же АЗС — автоматы защиты сети), россыпь которых расположена сверху и сзади пилотов. Как ни странно, это все описано в официальной документации, коей является QRH (Quick Reference Handbook, эдакий «томик Достоевского» на борту самолета, содержащий дополнительную информацию и нормальные/аварийные процедуры). Т.е. увидели ошибку систему, убедились в том, что индикация подтверждается, открыли QRH и проверили раздел SYSTEM RESET на предмет наличия оных. Еще раз подчеркну — никакая самодеятельность здесь недопустима в принципе: правило «а чо, давай дернем, я так сто раз делал» в авиации не работает.
- Если уж говорить об ошибках программистов – то несмотря на многоуровневую систему контроля кода, иногда ошибки попадают в production, а у пилотов появляются так называемые RED OEB (Operations Engineering Bulletins) – дополнения в QRH с кратким описанием возможной проблемы + необходимые процедуры для пилотов. Чтобы вы понимали всю серьезность, например OEB 48 многолетней давности при определённых условиях переводил самолет на пикирование (ложное срабатывание защиты по углу атаки), из которого вывести самолет можно было только определенной процедурой, полное отклонение сайдстика «на себя» не помогало. Да, в реальной жизни данная проблема имело место быть только один раз (и то не у авиакомпании из нашей страны) и возникала при очень уж экзотическом стечении обстоятельств, но сам факт…
Подготовка к посадке на эшелоне
Итак, мы летим на крейсерском эшелоне, при подлете к аэродрому назначения примерно за 200 с небольшим миль по VHF радиостанции можно услышать информацию ATIS (Automatic Terminal Information Service) аэродрома назначения. Принимаем погоду, далее с помощью специального программного обеспечения от Airbus, размещенного на бортовых iPad’ах (они же EFB — Electronic Flight Bag), проверяем погоду на предмет соответствия нашим landing performance, в частности соответствия расчетной посадочной дистанции располагаемой длине полосы с учетом текущих погодных условий и коэффициента сцепления на полосе и имеющихся отказов оборудования. Airbus 320 семейства имеет ограничения как по попутному ветру для взлета/посадки, так и по боковому. При этом боковая составляющая ветра с учетом порывов не должна превышать значения, внесенные в AFM (Aircraft Flight Manual, оно же РЛЭ – Руководство по летной эксплуатации) при сертификации самолета. Кроме этого, могут быть дополнительные ограничения в аэропорту назначения/запасным, которые находятся в NOTAM’ах (NOTice To AirMan) – эдакая пачка бумаги, которая обязательно выдается перед вылетом экипажу.
Кроме этого, погодные условия на аэродроме должны соответствовать минимуму самолета, экипажа и аэродрома. Если говорить простым языком, то минимум это минимально допустимые значения дальности видимости на полосе и высота облачности над ней (профессионалы, молчать!) Кому интересно – на том же SKYbrary есть очень много статей, рассказывающих про минимумы их применение.
Если с учетом всех имеющихся ограничений погодные условия позволяют выполнить посадку, а минимум с учетом этих ограничений «проходит» – то экипажем принимается соответствующее решение и начинается подготовка к посадке.
Сама подготовка включает в себя внесение в FMGS (Flight Management Guidance Computer, на Airbus их 2) через мини-клавиатуру с дисплеем MCDU (Multipurpose Display Unit) схем прибытия (STAR, STandard ARrival) и самого захода (Approach, обычно это одна из инструментальных схем захода – например заход по ILS, Instrument Landing system), погоду в аэропорту назначения (давление QNH, температура, ветер) и минимума для соответствующего типа захода.

MCDU
При этом схема захода берется автоматически из базы FMGS (которая обновляется техническим составом раз в 24 дня на каждом самолете) и обязательно полностью проверяется на соответствие аэронавигационным сборникам. Наша авиакомпания использует сборники фирмы Jeppesen, которые так же размещены в электронном виде на бортовых EFB:

iPad, прибитый к самолету

Или более жесткий вариант. Спасибо lx_photos
После того, как один из пилотов внес данную информацию, второй проводит проверку внесенных в FMGS данных (crosscheck – это одно из основных правил в авиации). Далее пилот, проводивший подготовку к посадке, зачитывает брифинг. Основная задача брифинга – рассказать об особенностях захода на посадку и ее выполнения, схемы руления после посадки, уход на второй круг. Особое внимание – при категорированных заходах по CAT II/CAT III (заходах с очень низкими минимумами, требующих выполнения специальных процедур) и действиям в случае отказа бортового оборудования в процессе захода или имеющихся отказах на борту самолета. NOTAM’ы со всеми ограничениями разбираются здесь же. После разбора всех имеющихся вопросов мы готовы к посадке, осталось дождаться подхода к точке начала снижения, которая так же рассчитывается автоматически исходя из внесенных в FMGS данных.
Интересные факты
- Несмотря на то, что в экипаже всегда есть командир (PIC, Pilot in Command – человек, несущий в первую очередь ответственность за все, происходящее на борту самолета) и второй пилот (SIC, Second in command), в полете они всегда делятся на PF (Pilot Flying) и PM (Pilot Monitoring). Т.е. один человек всегда управляет самолетом, а второй всегда контролирует его действия и работу систем самолета. По факту – в 95% случаев один из пилотов выполняет полет в одну сторону, а другой – обратно, так как большинство рейсов «разворотные».
- Погоду на аэродроме назначения можно получить также при помощи ACARS (Aircraft Communications, Addressing and Reporting System) – это система цифровой связи, работающая через сеть наземных станций в VHF диапазоне. Все запросы делаются через отдельное меню в MCDU, а результаты – обычно распечатываются на мини-принтере, который есть в каждом самолете:

Тот самый принтер (справа внизу)
Снижение и заход на посадку
По своей сути весь процесс полета – это процесс управления энергией. Химическая энергия топлива преобразуется через тягу двигателей и подъемную силу в кинетическую энергию движения самолета и его потенциальную энергию по мере набора высоты, что в сумме дает общую энергию. При снижении – мы наблюдаем обратный процесс, когда вся накопленная энергия расходуется через аэродинамику и снижение высоты таким образом, чтобы получить посадочную скорость и заданную высоту к моменту пролета торца полосы. Исходя из вышесказанного и с учетом отдельных ограничений по скорости/высоте пролета отдельных точек на схеме STAR, ветра, FMGS вычисляет TOD (Top Of Descend, точка начала снижения).
При подходе к TOD пилот, ведущий радиосвязь информирует об этом диспетчера и запрашивает снижение. Учитывая сложность структуры воздушного пространства и наличие отдельных секторов с разбивкой по высотам/географии процесс снижения обычно состоит из отдельных «ступенек» — каждый диспетчер дает разрешение на снижение в пределах своего сектора с последующим переводом на частоту следующего.
Снижение на самолетах семейства Airbus может выполняться в двух режимах: MANAGED и SELECTED. В первом режиме самолет при помощи автопилота (AP, Autopilot) и автомата тяги (A/THR, Autothrust) сам пытается выдержать профиль снижения с учетом всех ограничений выбранной схемы прибытия, пилоты только контролируют то, что делает автоматика. Это не всегда удается, так как кроме профиля и скоростей, посчитанных FMGS, есть параметры, задаваемые диспетчером. Но в любом случае задание высот и перевод самолета на снижение – это ответственность PF. Для этого в самолете есть FCU (Flight Control Unit) – эдакая панель управления автопилотом самолета:

FCU с красивой подсветкой. Второй автопилот и автомат тяги включен
В режиме SELECTED – пилоты сами управляют автопилотом задавая режимы его работы. Типичные параметры – задача вертикальных и поступательных скоростей, так же довольно часто используется векторение (полет по курсу, заданному диспечером).
При этом в нашей авиакомпании (да и во многих других) не запрещено и даже поощряется понижать уровень автоматизации – например отключать автопилот, автомат тяги, директора и выполнять заход полностью на руках. Для примера, вы можете идти в режиме MANAGED с отключенным автопилотом/автоматом тяги или в режиме SELECTED полностью в автомате, или полностью уйти от директоров, включить режим FPV (Flight Path Vector, она же «птичка»). Т.е. пилотирующий пилот всегда может использовать почти любую комбинацию режимов/автоматики. Но важно при этом понимать, что нагрузка на пилотирующего пилота резко возрастает, а пилот, осуществляющий мониторинг, так же тратит ощутимо больше времени на контроль всего происходящего. Поэтому, обычно подобные полеты без автоматики выполняются в незагруженных портах с низким трафиком, дабы не создавать себе проблем на ровном месте.
Что касается ручного пилотирования: при нормальном законе управления (NORMAL LAW) все защиты (PROTECTIONS) будут работать и ограничивать пилотов в попытках выйти за заложенные в систему ограничения. При наличии каких-то отказов, данные PROTECTIONS имеют свойство деградировать, последовательно отключаюсь. Все это обсуждается ранее, на брифинге. При возникновении отказов оборудования – задача пилотов полностью «обработать» данный отказ, выполнив необходимые процедуры используя ECAM (Electronic Centralized Aircraft Monitor, это когда текст процедуры виден непосредственно на одном из дисплеев самолета) и/или QRH и при необходимости повторно принять решение о заходе на посадку с учетом появившихся ограничений.
В процессе снижения пилотов летом обычно подстерегают грозы, которые всегда благоразумно обходятся на безопасном удалении (более подробно об этом можно почитать здесь). Самое страшное – это даже не удар молнии, от которых самолет надежно защищен, а попасть в град, который обычно есть внутри такого кучево-дождевого облака. Восходящие и нисходящие потоки в таких облаках и рядом с ними так же очень сильны, «выбитый» автопилот, пару травм в салоне и мокрые штаны у пилотов – легко. Поэтому, если полет спокоен, а табло «пристегните ремни» включено, последуйте советам пилотов, кто его знает, что там впереди.

Грозовые очаги, как их видят пилоты на ND (Navigation display)
При полетах в горной местности используется система EGPWS (Enhanced Ground Proximity Warning System, система предупреждения о близости земли). Она благодаря наличию встроенной базы подстилающей поверхности позволяет дополнительно контролировать пилотам пролет препятствий. Данная система включается отдельной кнопкой в кокпите (TERRAIN on ND) и отрисовывает на ND поверхность земли различными цветами — от зеленого до красного. При наличии опасного сближения с землей – самолет дурниной будет орать «PULL UP!» с соответствующей визуальной и звуковой индикацией.
При наличии множества самолетов вокруг в высоконагруженных хабах пилотам может помочь система TCAS (Traffic Collision Avoidance System, она же БСПС – бортовая система предотвращения столкновений). Если пилоты и/или диспетчер допустят потенциально опасное сближение двух самолетов в воздухе, данная система выдаст RA (Resolution Advisory) – команду на изменение/сохранение высоты, которую пилоты выполняют в ручном режиме. Притом, срабатывание системы происходит одновременно на двух самолетах, один обычно уходит в набор, второй – в снижение. Опять же, самолет начинает истошно кричать пилотам: «CLIMB! CLIMB NOW!» или «DESCEND! DESCEND NOW!» в зависимости от сработавшего RA. Если же пилоты следовать командам не будут – то возможны катастрофы как печально известная катастрофа над Боденским озером. Один из ее сопутствующих факторов – противоречивые команды TCAS и диспетчера (один – в набор, второй – в снижение) и нормативные документы, которые требовали приоритета команд диспетчера над командами TCAS. Сейчас же – явно прописан приоритет TCAS над командами диспетчера.
Буквально несколько слов о процедурах в процессе снижения (а Airbus – это самолет в первую очередь процедурный, заточенный под выполнение полета в двухчленном экипаже). При проходе эшелона полета 100, выполняется определенный комплекс процедур. Далее, при проходе эшелона перехода выполняется перестановка давления с «стандартного» — 1013 hPa, оно же Standard (давление, по которому осуществляется полет выше высоты перехода) на давление QNH — давление, приведенное к уровню моря, полученное в ATIS. Ниже эшелона перехода мы летаем только по QNH, никаких QFE как в старые добрые времена. Здесь можно было бы начать очередной небольшой холивар на тему QFE и QNH, но оставим это кому-нибудь другому. Далее, crosscheck установленного давления и APPROACH чеклист. Что касается чеклистов – на Airbus они сделаны не по принципу «read and do» как на некоторых других типах самолетах, а по принципу контроля уже выполненных стандартных процедур (SOP, Standard Operating Procedures). Назначение чек-листа – это не «упустить» процедуры, которые непосредственно влияют на безопасность полета.
Интересные факты
- Несмотря на то, что полет выполняется в полностью контролируемом воздушном пространстве и под управлением диспетчера, не всегда возможно выполнить его команды. Классика жанра – «снижайтесь и гасите скорость» одновременно. Даже на малом газу с выпущенными спойлерами это не всегда возможно.
- В загруженном воздушном пространстве мы имеем четко прописанные ограничения по вертикальным (а иногда — и поступательным) скоростям полета, которые мы обязаны выдерживать перед занятием указанной диспетчером высоты – в противном случае возможно срабатывание системы TCAS.
- На современных самолетах A320 NEO система TCAS может отрабатывать RA полностью в автомате (на автопилоте), пилоты лишь контролируют ее работу. На «обычных» самолетах – пилоты делают все сами руками.
- При срабатывании системы EGPWS карта местности на ND появится автоматически. Эдакая дополнительная «защита от дурака».
- При наличии больших минусовых температур на аэродроме назначения барометрические высотометры (да, не удивляйтесь – вся авиация летает по BARO) имеют свойство ощутимо завышать индицируемую высоту. Отсюда при полетах в минусовых температурах используются специальные процедуры коррекции высот
Выполнение посадки
Самолет медленно (со скоростью порядка 250-200 узлов) приближается к точке входа в глиссаду/точку начала снижения. Теперь задача пилотов – обеспечить плавное гашение самолета до посадочных скоростей (порядка 130-140 узлов для A320) с постепенным выпуском механизации и шасси. Пятиминутка аэродинамики: самолет имеет SLATS (предкрылки) и FLAPS (закрылки). Первые нужны чтобы самолет мог лететь на более низкой скорости (и на более большом угле атаки) без срабатывания соответствующего PROTECTION, а вторые – для увеличения подъемной силы ценой увеличения лобового сопротивления (позволяют не увеличивать угол атаки на более низких скоростях для компенсации недостаточной подъемной силы). Без всего этого добра – посадочные скорости были бы порядка 200 узлов, вертикальные – тоже ощутимо выше. Что – небезопасно (времени на исправление ошибки гораздо меньше, а риски если «что-то пошло не так» — выше).
Еще небольшое лирическое отступление касательно систем захода на посадку: они бывают точные (в первую очередь это ILS, GLS — GBAS Landing System) – это заходы с вертикальным наведением и неточные (NDB – Non Directional Beacon, он же заход по приводам, VOR, RNAV и т.д.) – это заходы без такового наведения. Для каждого из типа захода на посадку есть т.н. GUIDANCE MODE — по сути режим работы FMGS, который обеспечивает заход самолета на посадку с учетом выбранного типа захода. При этом GUIDANCE MODE может обеспечивать точное наведение самолета по курсу и глиссаде (режимы LOG GS или FINAL APP) так и наведение только в одной плоскости (режимы LOC FPA или NAV FPA) или полностью ручное наведение самолета по заданному курсу/углу снижения (режим TRK FPA). Если суммировать сказанное, то точные заходы — более просты с точки зрения поддержки бортовой автоматикой, неточные — требуют дополнительного контроля как профиля, так и курса захода на посадку, что так же требует дополнительных усилий при заходе. Точные заходы позволяют осуществлять посадку при более низких минимумах, чем неточные.
В свою очередь, точные заходы делятся по так называемым категориям: CAT I, CAT II, CAT III A/B/C с соответствующим минимумом. На бывшей территории Советского Союза наличие ILS в аэропортах было раньше непозволительной роскошью, что не позволяло осуществлять заходы при более низких минимумах (чем точнее система захода – тем ниже минимум аэропорта). Но сейчас почти все большие аэропорты севернее Томска имеют ILS. Заход по приводам на старой технике это было еще то искусство полета… Для примера: если взять всю маршрутную нашей авиакомпании в России – только 22 аэропорта оборудованы системой ILS для захода по II категории и только 5 – для захода по IIIA.
Итак, самолет начинает постепенно гасить скорость и «расчехлять» все вышеописанное добро в виде механизации для захода на посадку. По технике выполнения захода есть две методики: DECELERATED/EARLY STABILIZED APPROACH. В первом случае, который обычно используется при точном заходе и высоких высотах входа в глиссаду (пламенный привет людям, кто делает эту высоту в 300-400 метров) – самолет проходит точку входа в глиссаду с выпущенными SLATS и начинает в процессе снижения постепенное гашение скорости с дальнейшим выпуском SLATS/FLAPS в посадочное положение (не забываем про шасси). Во втором случае (неточный заход) – мы полностью стабилизируемся к точке начала снижения на минимальной скорости в посадочной конфигурации и выполняем дальнейшие снижение. Опять же, все эти процедуры могут быть выполнены как полностью в автоматическом, так и в ручном режиме.
Переводим самолет на снижение, зачитываем LANDING чеклист, получаем от диспетчера разрешение на выполнение посадки. При этом диспетчер обязательно сообщит текущий ветер, если он выходит за наши ограничения – то уходим на второй круг. Почти любое срабатывание сигнализации об отказах ниже 1000 футов над полосой в отсутствии визуального контакта с полосой – тоже уход на второй круг.
Далее, если все хорошо, пролетаем торец полосы и приступаем к выполнению посадки. Теоретически – все просто: «на высоте около 30 футов выполните выравнивание с последующей установкой малого газа и выполните посадку» — примерно так написано в FCOM. FCTM (Flight Crew Technique Manual) уделяет буквально 2 странички данному процессу. Если же попробовать кратко сформулировать, что там описано, то получим:
- Как я говорил в самом начале – Airbus это самолет с системой Fly-by-Wire и для того, чтобы пилоты выполняли привычные для себя действия как при полете на «обычном» самолете – «подошел, выровнял, малый газ, добрал, досадил» был реализован специальный режим FLARE. Как он работает: при пролете высоты в 50 футов по радиовысотометру «запоминает» угол тангажа, используя его в качестве референса. При пролете 30 футов – начинает плавно уменьшать тангаж с таким расчетом, чтобы в течении 8 секунд он уменьшился до -2 градусов. Пилот в испуге от приближающейся земли тянет на себя сайдстик, как на обычном самолете («добирает» самолет перед посадкой). Посадка. Аплодисменты. Да, в этом режиме полета остается только одна из всех имеющихся «защит» — по углу атаки. Одна из тонкостей данного режима – при FLARE управление стабилизатором через PITCH TRIM «замораживается» (т.е. уходит автотриммирование в продольном канале), работает только руль высоты и работает он по логике DIRECT LAW. Т.е. на сколько вы сайдстик на себя потянете – на столько и отклонится руль высоты, все как на «обычном» самолете. С угловой скоростью опускания носовой стойки самолетом тоже все непросто – чем больше у вас был угол тангажа на 50 футах (вспоминаем про референс), тем больше у вас будет угловая скорость уменьшения тангажа и тем быстрее надо будет тянуть сайдстик на себя.
- Современный самолет – это длинная летающая колбаса (с). Таким он стал только благодаря коммерсантам: длинее самолет — больше пассажиров — больше денег при тех же постоянных эксплуатационных расходах. Ограничения по тангажу на взлете и посадке, особенно для A321 очень жесткие, главный приз – TAILSTRIKE (это когда происходит контакт задней частью фюзеляжа с полосой). Соответственно на выравнивании – тянуть на себя, уменьшая вертикальную скорость и увеличивая тангаж можно только очень ограниченное количество времени, запас очень небольшой. Для понимания глубины происходящего безобразия, типичный тангаж при заходе на A321 — порядка 2,3 градуса, «приз» наступает — при 9,7 градусах при полностью обжатых пневматиках. По факту на A321 угол тангажа при посадке около 5-6 градусов, не более, более — страшно. То же самое с креном – ограничения тоже очень жесткие, есть риск защепить полосу либо законцовкой крыла, либо двигателем.
- Как следствие всего этого – самолет имеет сертификационные ограничения по боковому/попутному ветру. Смысл их таков, что среднестатистический пилот должен безопасно осуществлять посадку в пределах данных ограничений, определяемых путем расчетов в процессе его проектирования. Кроме этого, есть понятие MAX DEMONSTRATED CROSSWIND, что для семейства Airbus 320 составляет 38 узлов и определяется на летных испытаниях в процессе сертификации. В реальности авиакомпании устанавливают еще более жесткие ограничения. Например, для A320 семейства это 29 узлов на взлете, а 33 – на посадке (как в FCOM/AFM). Наличие попутного ветра допустимо, но в определенных пределах, ограниченных AFM. Для Airbus это обычно 10 или 15 узлов в зависимости от модификации самолета. А так – самолеты почти всегда взлетают/выполняют посадку против ветра.
- Добавляются еще масса мелочей: наличие сдвига ветра/болтанки, ветровая обстановка, с какими типами законцовок крыло самолета (с винглетами – более летучий из-за уменьшенного индуктивного сопротивления), наличие спутного следа и т.д. и т.п. «А сейчас вместе со всем этим мы попробуем приземлиться..». Тот же youtube по crosswind landing выдает миллион увлекательных ссылок, например:
Было близко... - В итоге: допустимые пилотом отклонения от нормальных параметров захода в процессе пилотирования должны быть минимальны и они жестко ограничены, а времени на исправления ошибок (
почти) нет. Поэтому в любом случае, если есть малейшее сомнение в безопасной посадке, то выход только один – на второй круг.
После касания основными стойками плавно опускаем носовую, включаем реверс и плавно тормозим или за нас это сделает сам самолет. Все самолеты оборудованы antiskid/autobrake системами, что очень сильно облегчает жизнь при плохих погодных условиях. Реверс же очень сильно сокращает посадочную дистанцию на покрытых осадками полосах, на сухих – он почти бесполезен.
В 99% в нашей авиакомпании посадка выполняется в ручном режиме. Исключения: категорированные заходы при низких минимумах (CAT II/CAT III), где автоматический заход желателен/необходим. Так же все самолеты семейства Airbus 320 умеют выполнять процедуру Autoland с последующим rollout’ом (автоматическая посадка с последующей остановкой на полосе, с выдерживанием направления пробега используя курсовой маяк системы ILS). Для выполнения данной процедуры еще более жесткие ограничения по ветру, состоянию ВПП, работоспособности бортовых и наземных систем. Как это выглядит вживую:
После того, как самолет снизил скорость до TAXI SPEED и, если не было дополнительных указаний диспетчера, самолет освобождает ВПП по ближайшей рулежке. Они бывают двух типов: HST (High Speed Taxiway), находятся под небольшим углом к ВПП и позволяют освобождать ВПП на больших (обычно до 45 узлов, но бывает и до 60) скоростях и «обычные» рулежки – здесь допустимая скорость руления не более 20 узлов.
Буквально три слова про уход на второй круг – в реальной жизни это бывает не так часто, но из-за редкости выполнения и скоротечности самого процесса требует повышенного внимания со стороны экипажа и особенно PM'a. Самое главное здесь – выдержать все ограничения по скоростям, высотам и тангажу при уходе с небольших высот – риск tailstrike высок как никогда. В зависимости от причины ухода на второй круг можно выполнить либо повторный заход, либо уйти на запасной аэродром.
Интересные факты
- Мягкая посадка <> безопасная посадка. Звучит странно, но это так. Особенно, при плохих погодных условиях. Например, при наличии осадков на полосе «positive touchdown» просто необходим, в противном случае эффекты типа аквапланирования способны обеспечить выкатывание самолета после посадки за пределы ВПП. Советская культура полетов (я сейчас не в плохом смысле этого слова, просто факт) требовала как можно более мягкой посадки, что периодически приводило к «перелетам» зоны точного приземления и последующим выкатыванием за пределы ВПП. Наличие сильного бокового ветра в сочетании с долгим выравниванием/выдерживанием может привести к тому, что самолет просто «сдует» с полосы в сторону.
- Airbus позволяет уйти на второй круг даже после посадки самолета, но до включения реверса.
- Современные самолеты взлетать сами не умеют. Совсем. Исключение – относительно недавно был тестовый полет Airbus, где подобную систему испытали на настоящем самолете:
- И самое, пожалуй, главное – аплодисменты в кабине не слышно. Совсем.
После посадки и до выключения на стоянке
А вот именно здесь, экипаж отдышавшись после выполнения посадки и освобождения полосы, выполнив необходимые процедуры с последующим AFTER LANDING чеклистом, переходит на частоту руления и узнает дальнейший маршрут движения по аэродрому. Обычно это длинная тирада с номерами рулежек, пересечений иногда с частотами для перехода и командами на ожидание в определенных местах. Главное здесь – все записать, повторить всю эту тираду диспетчеру и найти на схеме аэродрома, где находятся все эти рулежки.
Вот здесь на видео с 6 минуты видно, что из себя представляет схема руления в приложении Jeppesen Mobile Flight Deck:
Так же все рулежки, полосы и и.д. в аэропорту имеют специальную разметку, которая позволяет ориентироваться как в дневное, так и в ночное время. Самое главное здесь – контролировать маршрут руления по всем этим знакам и в случае малейших сомнений – переспрашивать диспетчера. Самолет заднего хода не имеет, поэтому если вы заблокируете рулежку или выедете на рабочую полосу без разрешения диспетчера (Runway Incrusion, что само по себе является серьёзным авиационным инцидентом) то вас просто не поймут.
Подъезжаем к гейту, здесь обычно нас встречает либо система типа SafeDock (моя любимая и наверное, самая распространенная), либо специально обученный человек в оранжевой/зеленой жилетке, который при помощи жезлов заводит нас на стоянку.

«Все, приехали, голубчики»

Процесс заруливания в исполнении системы SafeDock
Скажу сразу, используемые маршалом сигналы являются стандартными во всем мире и описаны в одном из документов ICAO. Таким образом мы (пилоты) можем понять, что от нас хотят с земли.
После заруливания и установки на стояночный тормоз выключаем двигатели, процедуры, чеклист и «Уважаемые пассажиры! ..». Все, добро пожаловать в аэропорт, всем спасибо за полет. Наземные службы как раз в этот момент как раз ставят колодки, открывают грузовые багажники и подгоняют трап/телетрап. Иногда – подключают наземное электропитание и кондиционирование.
Интересные факты
- Иногда, вместо заруливания на стоянку нам приходится выключаться на рулежке и самолет при помощи тягача «затягивается» на нужную стоянку. Так поступают, когда стоянка для самолета не является «самоходной», т.е. не предназначенной для самостоятельного руления самолета пилотами. В этом случае вас просят настоятельно не вставать и не расстегивать ремни – кто ж знает, что там на земле. Рекомендую не спешить в проход вместе со всеми, ибо в случае резкой остановки/начала движения травмы обеспечены.
- Обычно после выключения на стоянке вся электросистема самолета продолжает какое-то время питаться от APU (Auxiliary Power Unit’a – мини-турбины, расположенной в хвосте самолета). Самое грамотное – не отключать отбор воздуха от компрессора этой турбины (APU BLEED), пока не вышли пассажиры – в этом случае будет работать кондиционирование салона. Некоторые, к сожалению, отключают.
- Но во многих иностранных аэропортах есть ограничения по работе APU – ее приходится почти сразу отключать после выключения и запускать непосредственно перед выталкиванием с гейта. Хорошо, если при этом работает подача кондиционированного воздуха с земли
Теперь вы знаете чуть больше про посадку, но, как показывает практика, всё равно без пилота не сядете. По крайней мере, пока.





















{kind=link}
{kind=link}
Vasaniy
Классно, когда читаешь статьи от человека, который в этой сфере работает, знает и честно рассказывает
nerudo
Единственный вид блогера, который имеет право на существование.
tvr
И при этом
вымирающийредко встречающийся вдикой природеэтих ваших интернетах за пределами специализированных площадок.DrGluck07
Сейчас, кстати, уникально время. Многие пилоты внезапно оказались на земле и начали более активно ковать контент. Причём на вполне себе неспециализированных площадках.