
я его слепила из того что было...
Версия 0...
Вечер, смеркалось, что то грустно, чего бы сотворить... И вступила мысль в голову, сваять дрон, но воздушный уже был, и на них придумали какие-то мутные ограничения, лежит на полке, ждет вдохновения.
Но у нас есть АБСОЛЮТНО не освоенная стихия, море, а море у нас вокруг... и там еще никого не ловят (дронов в частности).
Подумано - задумано, перво-наперво погружаемся в интернеты... Оказывается что информации и рабочих групп по теме, ну очень мало, всего 2... на обозримых информационных полях... Решаем остановится на BlueRobotics (GitHub).
Информации там море, информация доступна, софт свободный, в общем сообщество маньяков, барыжат (простите за кухонно-пиратский жаргон) комплектующими и готовыми изделиями...
Закачиваем все что есть по теме, копаемся, разбираемся, в принципе мозг у аппарата прост, в базовой комплектации...
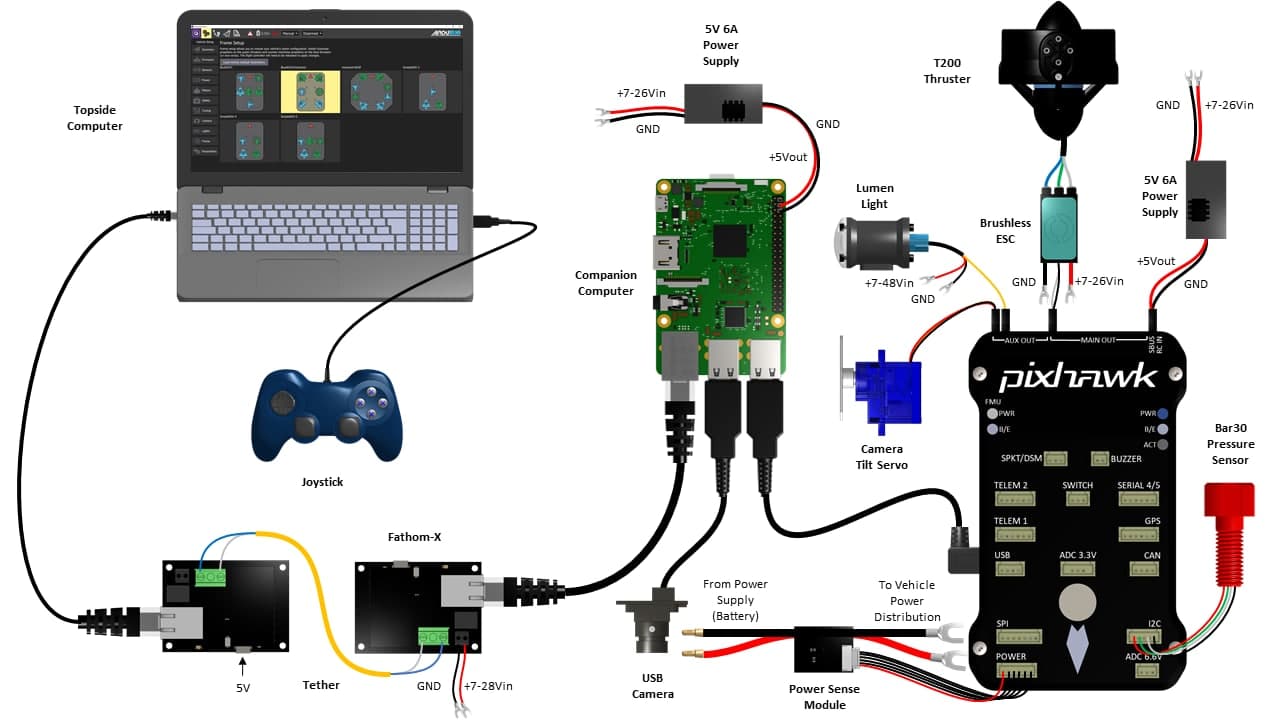
Набор практически стандартный для полетов в 3-х мерной среде, полетный контроллер, микрокомпьютер-компаньон, некая система обмена с компьютером руления-управления-смотрения, в качестве аппы геймпад, ну и всякая мелочь, как то, регули, камера, трастеры (моторы), фара, датчики внешние...
Полетный контроллер свеженький, на базе STMF4, жаба давит покупать, достаем с полки на базе atmeg-и, и пытаемся туда прикомпилировать прогу управления, готовых под ЭТО нет, естественно, увы, недолго биениями головы об стол, забросил этот вариант, да и жаба куда-то испарилась.
Обращаемся к дядюшке Ляо, и в принципе не очень затратное можно взять комплектик со всякими плюшками...
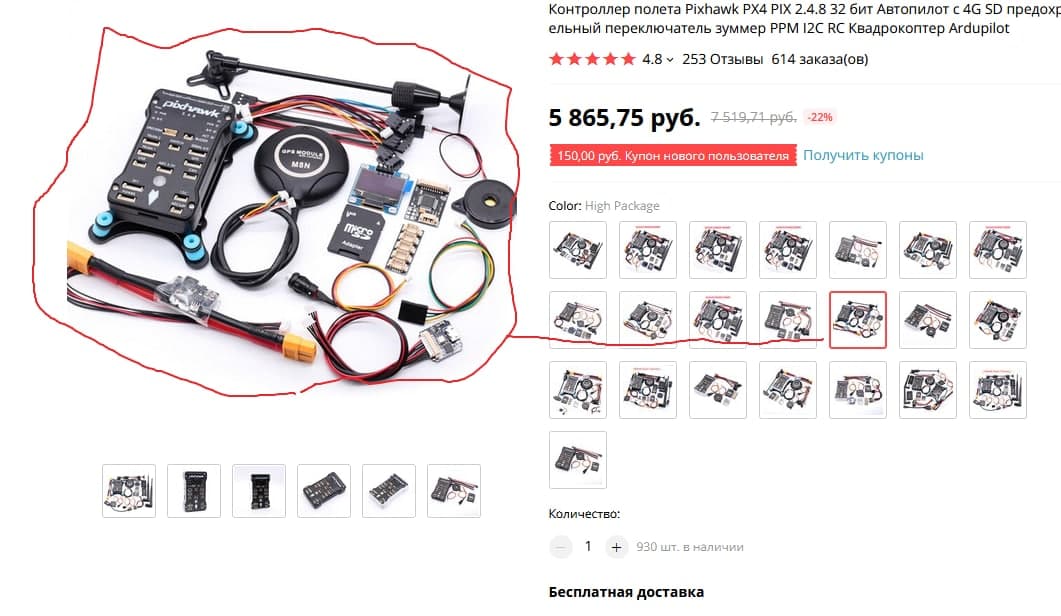
Ну коли взялись, закупаем, месяц спустя получаем, красиво, внутри...
Ну, думаю, если что, потом сгодится и летать... Могучий контроллер...
Далее, малинка есть, камера к ней тоже завалялась, батарейку с дрона снимем..

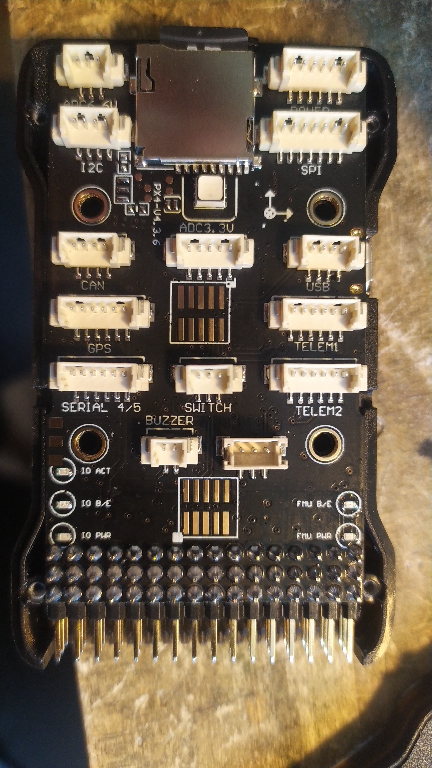
Нубук есть, софт есть... минимальные мозги вроде собрали, пробуем собрать все в кучу, и после некоторых танцев с бубном, софтина все увидела, залила прошивку из недр инета, и вообще все увидела, все датчики и прочее ...
уряяя....
Получив порцию вдохновения от полученных результатов, копаем дальше...
Трастеры (моторы), совершенно случайно в закромах завалялись 4-регуля и 4 мотора к ним...
Как позже оказалось, регули оказались с прибабахом, хотя и позиционировались как супер-пупер...
Единственное достоинство, что их удалось перешить и включить в них бидерект...
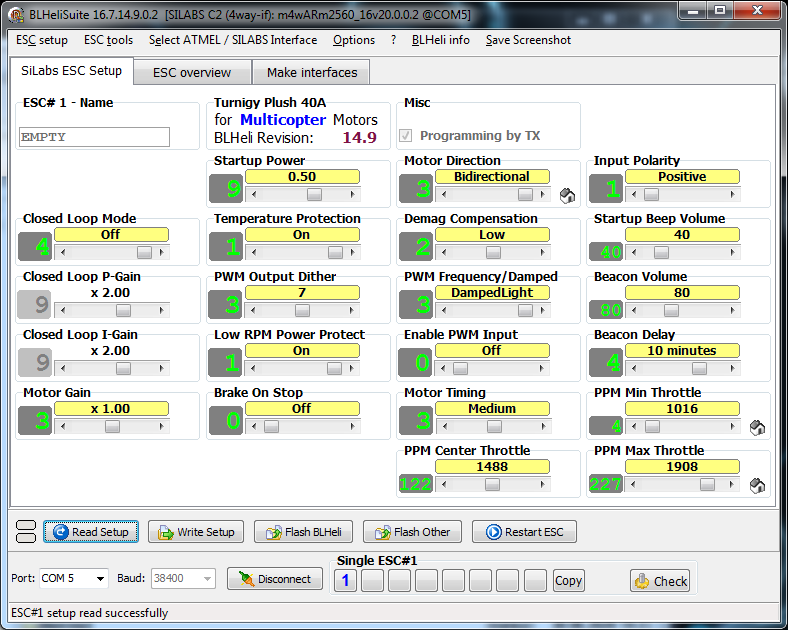
Для перешивки регулей использована прога BLHeliSuite.exe.
Хорошая вещь...
Ссылки по теме першивки и настройке...
https://github.com/bitdump/BLHeli
http://quad-copter.ru/609-proshivka-blheli-podrobnaja-na.html
http://mcheli.blogspot.com/2014/10/blheli-brushless-esc-firmware.html
https://docs.google.com/spreadsheets/d/13tMlu5ldLNpZXwbe6UhDHJhcgTVuljm8HDiDp9WO9Pk/edit#gid=0
Препарированный регуль...
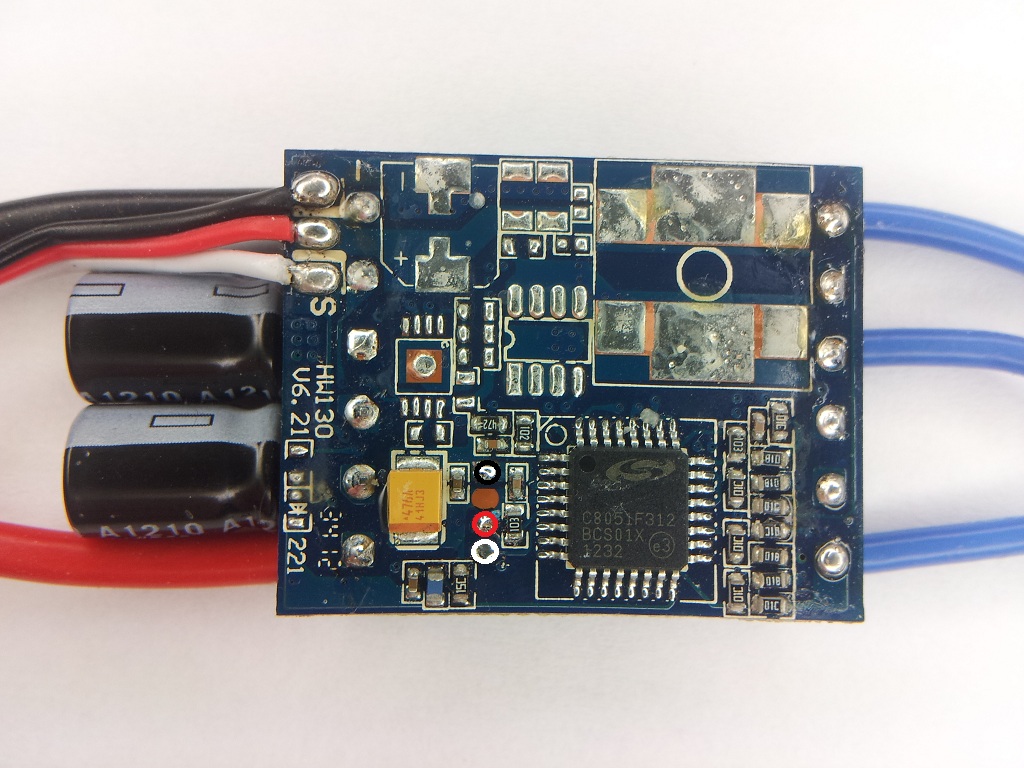
Собираем простейшую схему аппа-приемник-регуль-мотор-батарея и проверяем как жужжжит... Все пучком... Идем дальше, перешиваем все регули, моторы переделывать под подводный вариант будем позже...
Собираем более полную схему, проверяем, все вроде рулится, единственно что не откалибровано, и моторы вяло крутятся, в 0-й точке аппаратуры управления...Но и это удовольствие позже...
Пока заказал датчик глубины, еле нашел...
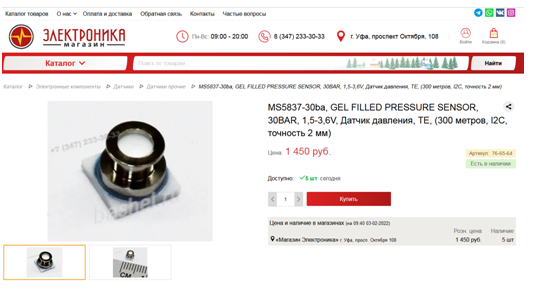
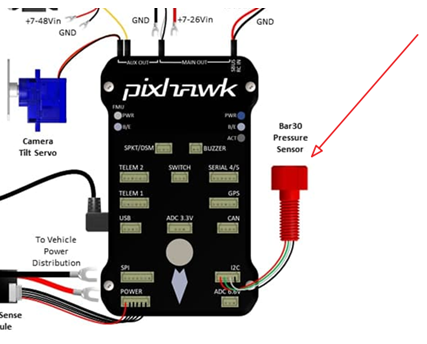
Без него не получится выдерживать и стабилизировать заданную глубину погружения, ехал 2 месяца... ужас...
Далее что то нужно придумать с организацией сетевого соединения с берегом... В оригинале задействованы некие "таинственные" агрегаты...
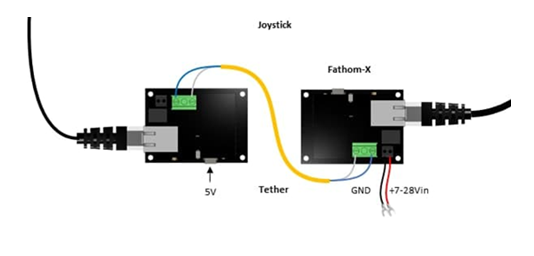
По сути, это для пропихивания Etherne-та через просто провод, можно найти, в принципе, обычно используется для прокидывания интернета через электропроводку... Но вариант, городить свой огород или покупать готовое. А оно оказалось весьма не дешево...
Попутно посмотрел, а что за кабель используют в оригинале, оказалось витая пара, кат.5, НО какой то спецзаказ, что ли... кевларовая оплетка пар + оплетка всего жгута + специфическая оболочка, в целом на таком кабеле, думаю можно как по альпинисткой веревке карабкаться... НО ценник, как чугунный мост...
Для нас, диких конструкторов не годится...
Рассмотрев разнообразные варианты, подумалось, а почему-бы не использовать просто оптику...
Проведя консультации со спецами по оптическим сетям, у нас тут фирма есть "САЙТ" зовется, в процессе общения выяснилось, что оптике вообще пофиг процесс затопления, прикупив за скромные деньги медиаконвертеры и 40 метров кабеля, для начала, самого дешевенький пачкорд с соответствующими разъемами, USB-Ethernet контроллер, ну и до кучи занятную WiFi точку доступа от MicroTik, так сказать для базы, чтобы нубук не привязан был...
К тому, же есть софт управления для планшетов, надо будет позже попробовать...
В общем получилось вот это...

Кстати, данная точка доступа обещает, до 20 км радиус с однотипной моделью... заманчиво в перспективе сваять поплавок герметичный, и можно от берега далеко ходить...
Ну вот, собрали комплект, осталось придумать, куда все это упаковать, и что бы не протекло...
На родном сайте продают боксы из акриловых труб со всеми заглушками и прочим, но суммарный ценник под 200 ухрюканых енотов, не для нашей кассы так сказать, ...
В общем идем на склад (балкон), смотрим, о, то что надо, менял проточный фильтр для воды на более эстетичную модель, и вот оно, трех баночное чуда, производитель дает информацию, что оно держит давление 7 атмосфер, а это уже -70 метров, и это на разрыв, на давку, думаю поболее будет, кто бы проверил, в наших деревнях барокамер таких нету...
Ну да нам и столько хватит, для начала.. ну начинаем компоновку....
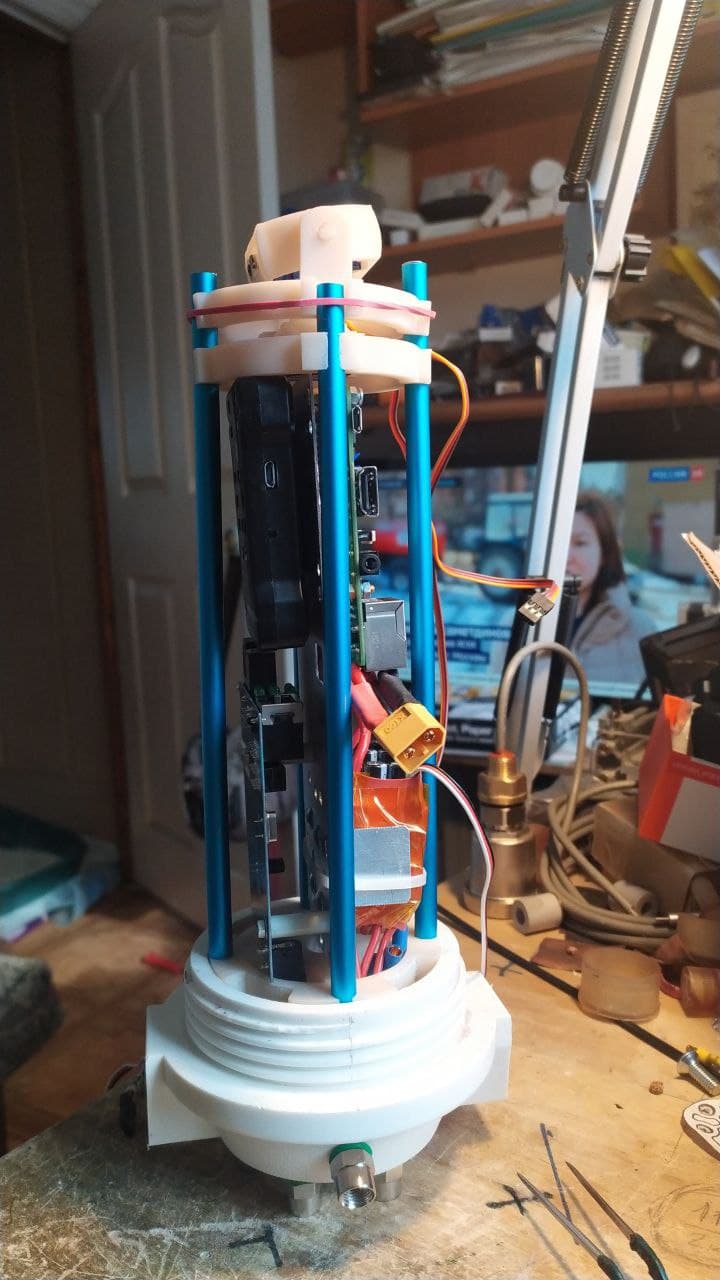
Рассверливаем торец и нарезаем резьбу под фитинги...

В общем после мытарств, выяснилось, что к великому сожалению, все в куче в одну банку ну не лезет, оптический медиаконтроллер оказался сделан с размахом, могли бы сделать его с флешку, но у дядюшки Ляо свое мнение...
Ладушки, у нас есть 3 банки от фильтра, снесем батарею во вторую банку...
Версия 1...
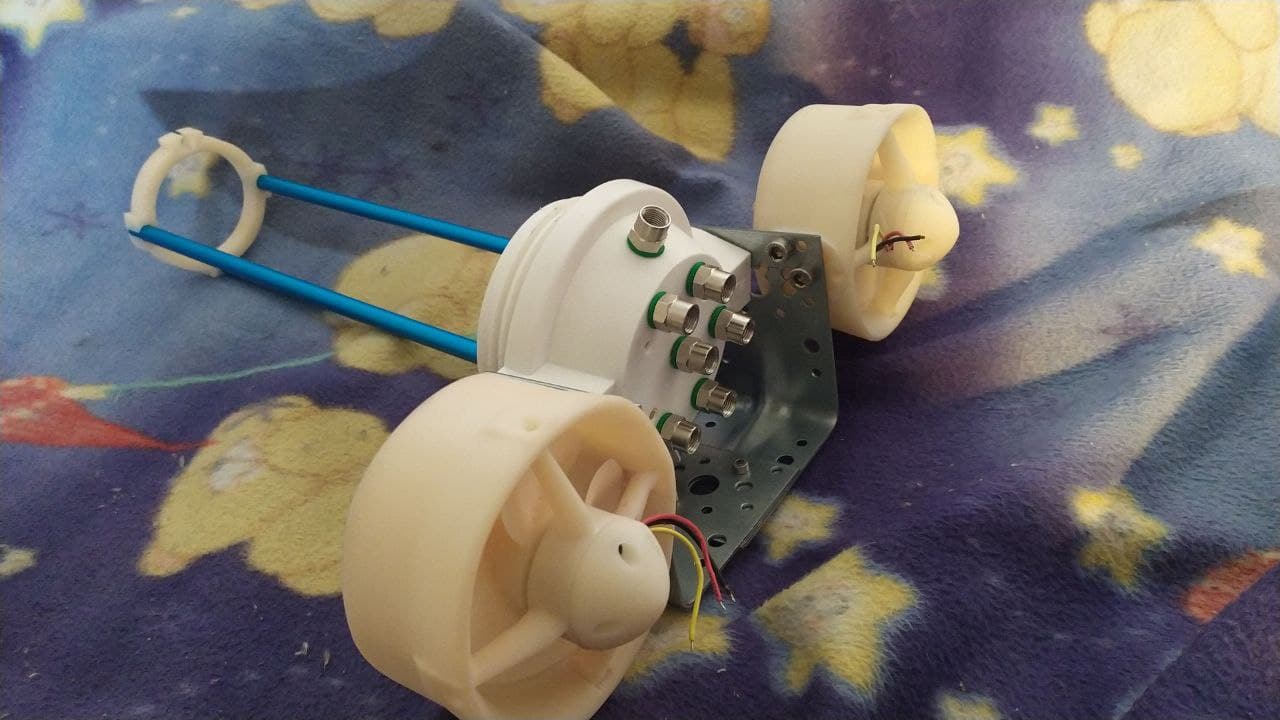
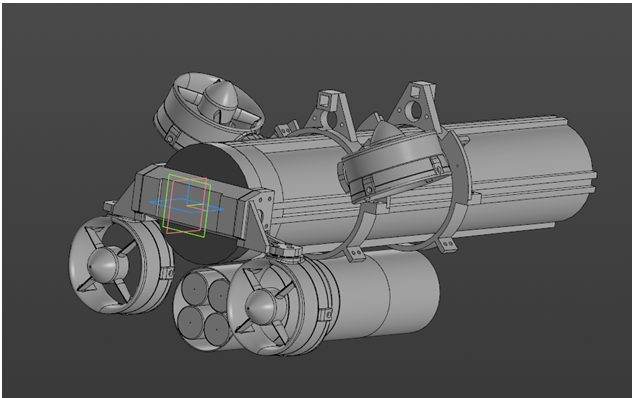
Не мудрствуя лукаво, выбрал трех моторную конфигурацию... Но позже, поразмыслив, понял, что будет ограничение в маневренности, с креном проблемы будут, посему, /переделываем все на 4-х моторную конфигурацию...



Но всплыли проблемы, между банками, получается слишком много соединений, и загерметизировать их не удалось ну никак, течет (пузырит, воздухом накачивал) и все тут...
В общем психанул...
Версия 2...
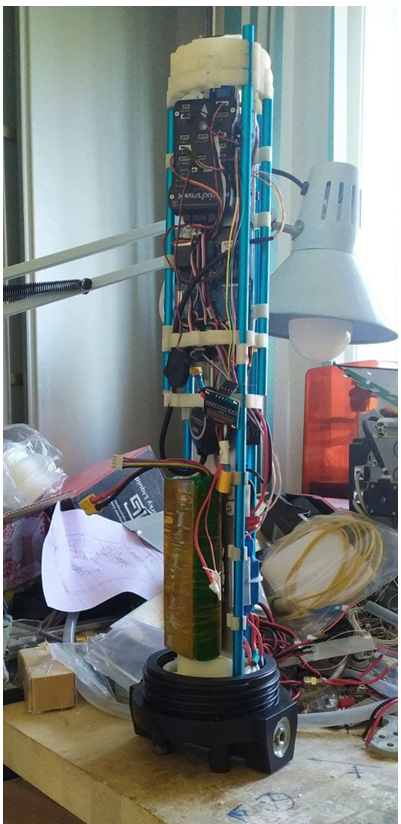
Решено все запихнуть в одну банку... Ищем подходящие, крупнокалиберные магистральные фильтры стоят огого...
Порывшись в инете найдено вот это... А не 6-7 тыров... И прозрачненькое, телевизор видно будет...
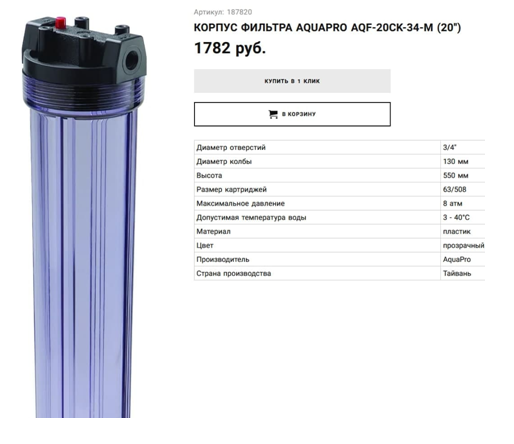
Приехало, сравниваем...

Что называется, налицо... Обрабатываем торец...

По центру, выключатель питания герконовый, не текло шоб... Фитинг с ниппелем, для наддува, контроль утечки, да и в принципе подпорку надуть можно..., ну и заглушки на время...
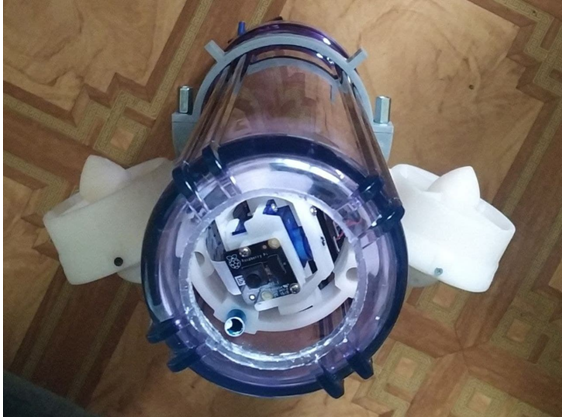
Бурим в носу дырку под иллюминатор, со ступенькой для опоры, в качестве иллюминатора очковое стекло, оттестирвано прыганием пяткой на полу, ~100 кг веса+ускорения, не лопнуло, держать будет...
Результат...


Красиво...
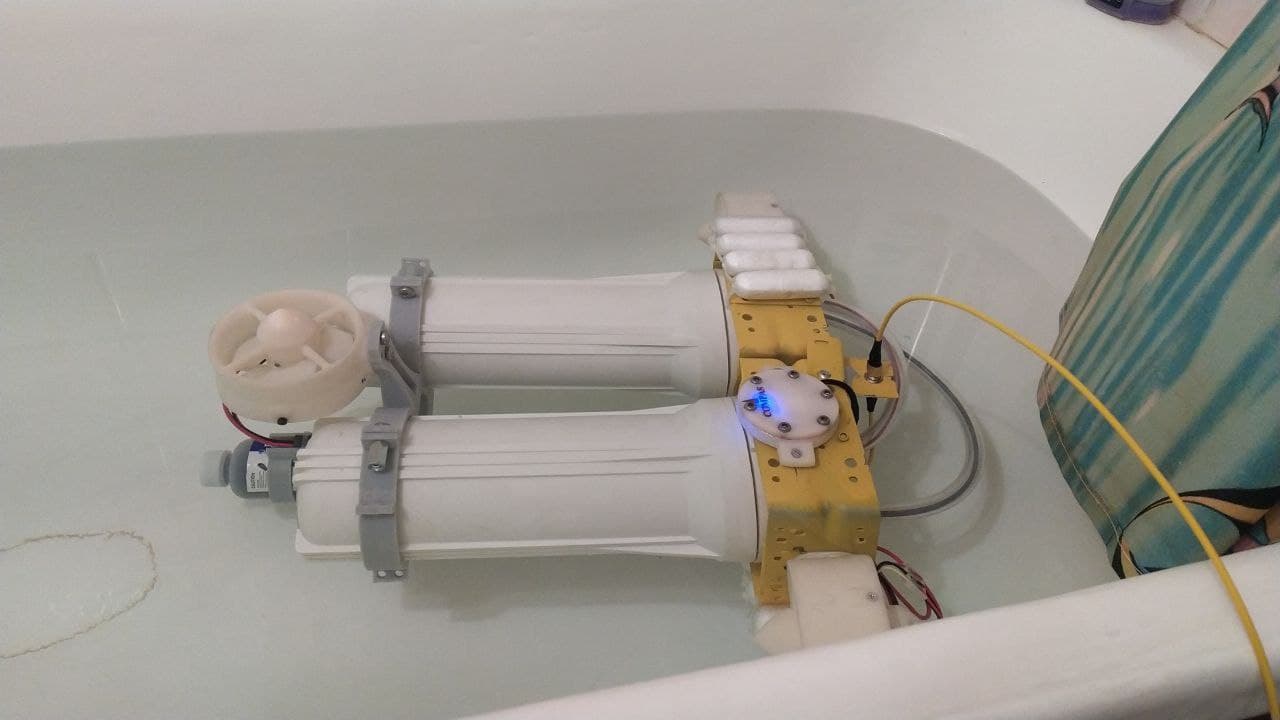
Тестовое утопление в ванной... да и проверить все...

Первая картинка, шланг от душа под водой...
Ну в принципе все готово, можно в поля...
Вопрос только куда, оказалось что подходящее место найти не просто, нужно что бы вода более-менее спокойной была, какой нибудь пирс, ибо плавсредства нету... Ну и что бы дно поинтересней... В открытое море, не вариант, пока, волна такая, что на черных морях штормом считается...
Да еще, сезон рыбалки и охоты, либо подстрелят, либо поймают и засолят, места свободного от глаз нету...
Ползаньем по гугл картам пару мест недалеко было определено, небольшая лужа, 1-2 метра глубиной, но мертвое, вода стоячая, неинтересно... запасной вариант...
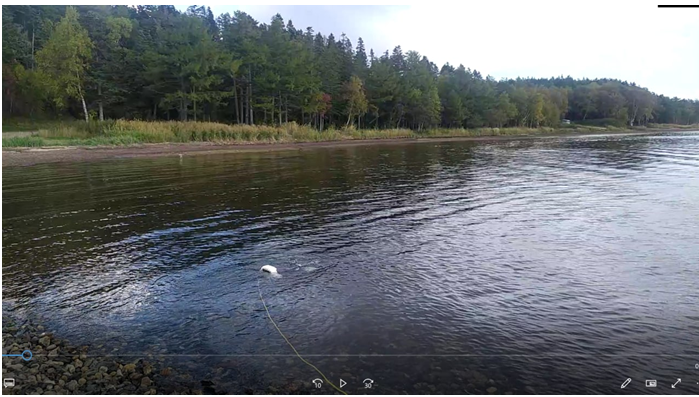
Залив, мелкий 1-2 метра тоже, травы немерянно, но с прогалинами, вода спокойная, типа пирсика что то, годится.

Это не я, это супружница моя дражайшая...))
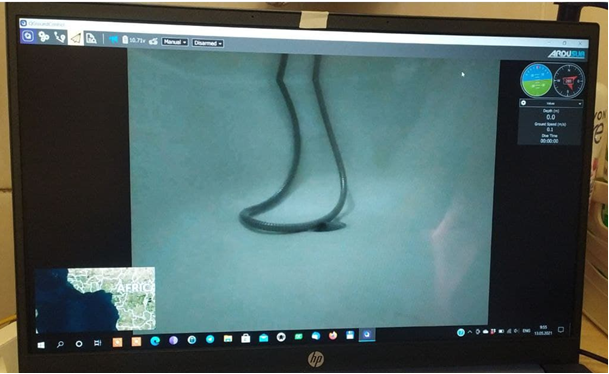
Итак вперед...


с картинкой, с фронтальной камеры... запотела, не учел, надо было антифогом намазать...

все в тумане...

видимость 0...


Пару кадров с боковой камеры, без подсветки и цветокорректировки, кстати фронтальная камера с +ИК...
Поэтому все зелено-коричневое а не сине-зеленое...

трек блужданий...
GPS работала по причине не утопления, еще одна ошибка, вывешивал в ванной, в пресной воде, в соленой получился эффект надутой лягушки, пытается нырнуть, а попа к верху, и тут проявилась еще одна проблема, плохо работающие регули, тяги не хватает для утопления от слова абсолютно...
Причем трастер тестировал на предмет возможностей в тазике, с регулем снятом с рабочего дрона, так он тазик воды вычерпал за пару секунд на полной тяге...
А эти регули вялые какие-то... как только их не строил, они у меня подозрения вызвали еще когда в воздушном дроне пытался их использовать, настолько вялые, что от земли оторваться не смог, ну вот и подумал что для воды пойдет, там же невесомость, а в связи с неверной вывеской, кстати тот еще гемор, не прокатило...
Трастеры...



моторы после ныряния в пресную воду и некоторого лежания ...
Видно что открытые места начали ржаветь, это уже с вынутыми подшипниками, суть в том, что шарикоподшипники стоящие по умолчанию не годятся, особенно для морской воды, сгниют напрочь,
посему нужно ставить скольжения, бронзовые, и двигатели нужно заливать смолой... В инетах можно найти видео, ссылочка потерялась, там мериканский дядька тоже дрон делает, но у него масштабы мериканские, размером с телеграфный столб... Вот там они и переделывали движки и заливали их смолой...
Но, есть другой вариант, более занятный...
В инетах напоролся на мотор-движетели, кстати информации о них минимум, но денег хотят немерянно...

баксов 200 за мотор, не помню... Но что нам стоит дом построить... на картинке все ясно...
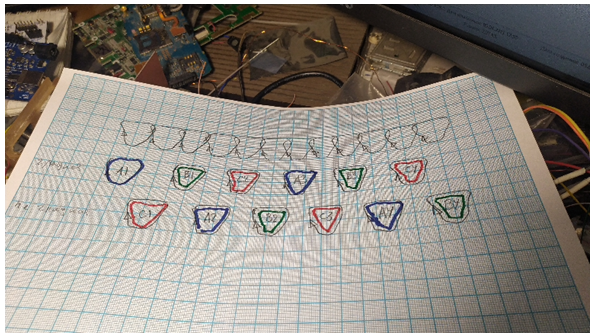
начитавшись теорий по электрическим машинам, выяснил, что обмотки нужно класть лучше так...
С захлестом... там что то про эффективности и прочее...
кин какой то в тему...
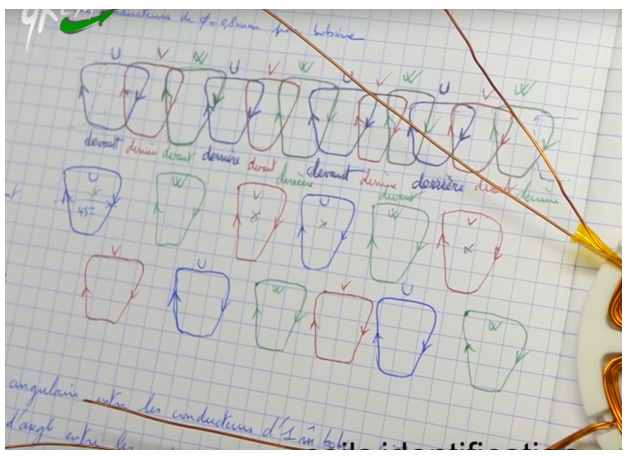
Обмотки соединяем так...
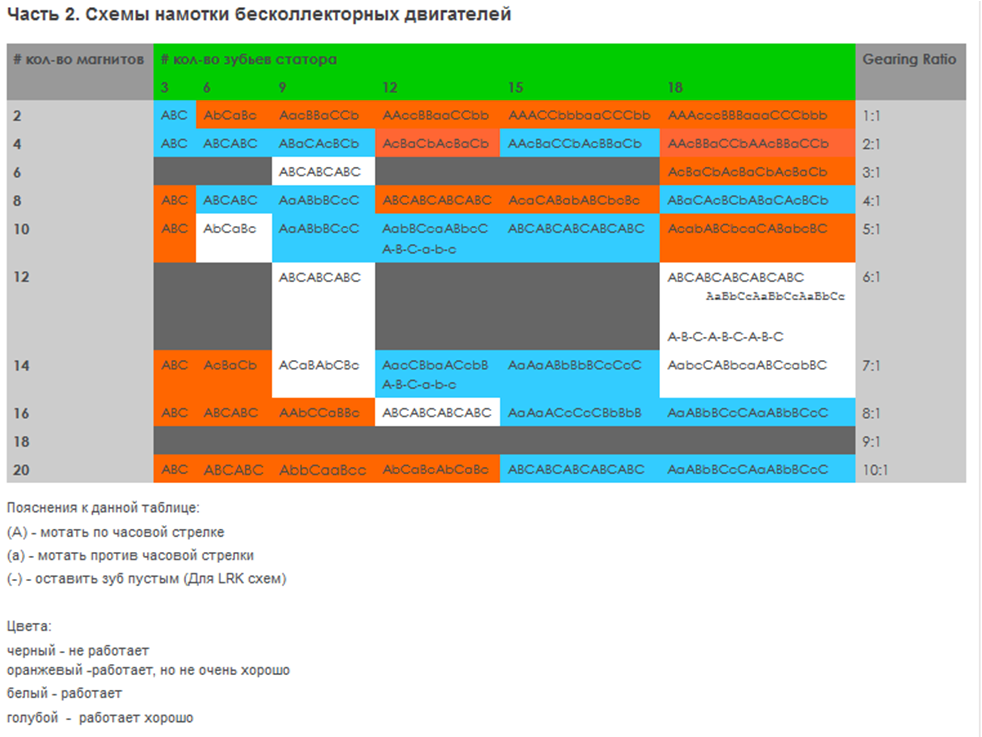
Схему намотки выбираем так, где то есть сайтик, там подбор конфигурации и соединения обмоток подбирается мышетыканьем, но так же потерялся, ан нет, нашелся,
Калькулятор, что то, но соответствует табличке...
Сказано-сделано...

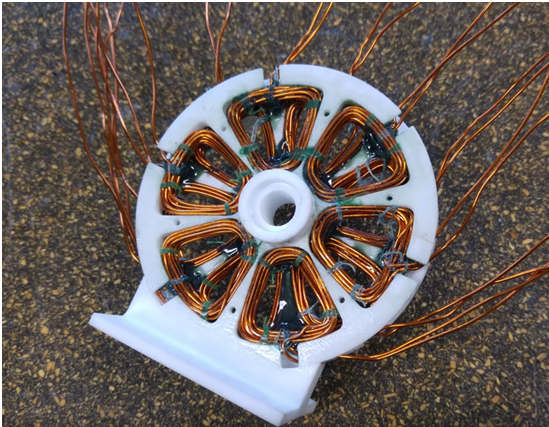
Вырастили обойму, запихали обмотки...

Залили смолой...
Но всплыл нюанс, укладывать пересекающиеся обмотки не получается, статор в целом толстый получается, а к тому-же провод для обмотки нужно использовать литцендрат, жгут диаметром 0.6-0.7 , можно толще но и пакет толще получаться будет, просто обмоточный провод, оказалось имеет слишком большое активное сопротивление, и ток не достигает нужного максимума, соответственно момент махонький получается, и все не тянет, а то и вообще не крутится...

Напряженность поля зависит от зазора, и чем оно сильней давит, тем более резкий двигатель получается, так что пришлось обмотки выкладывать в одной плоскости, получается достаточно тонко, В оригинале используется судя по всему целый кольцевой ферромагнит, намагниченный на необходимое количество полюсов, мы используем каркас с гнездами под редкоземельные магниты, маленькие, но их много:
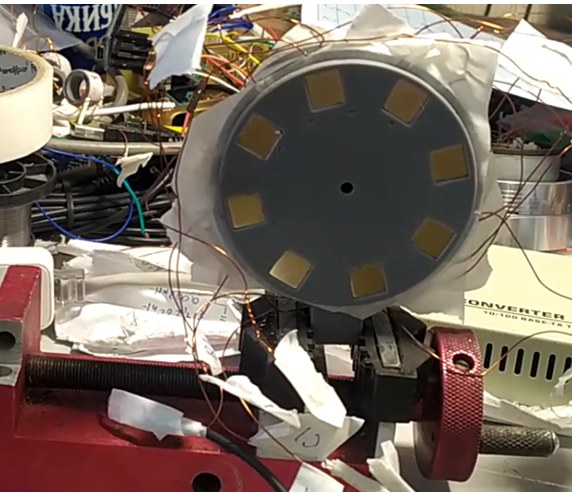
Первый вариант, в следующих увеличено до 10, больше не влазит, стенки тонкие получаются, ротор разрывает, до сих пор магниты нахожу по комнате...

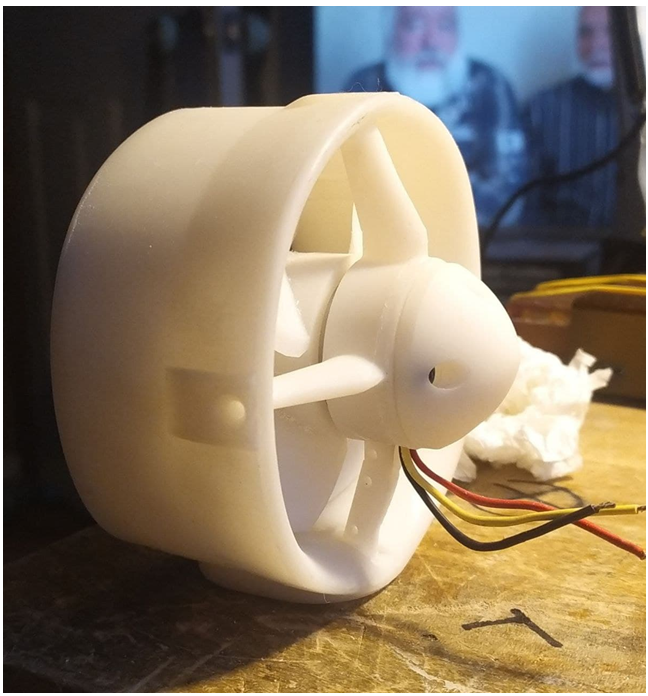
В общем получился такой красавец...
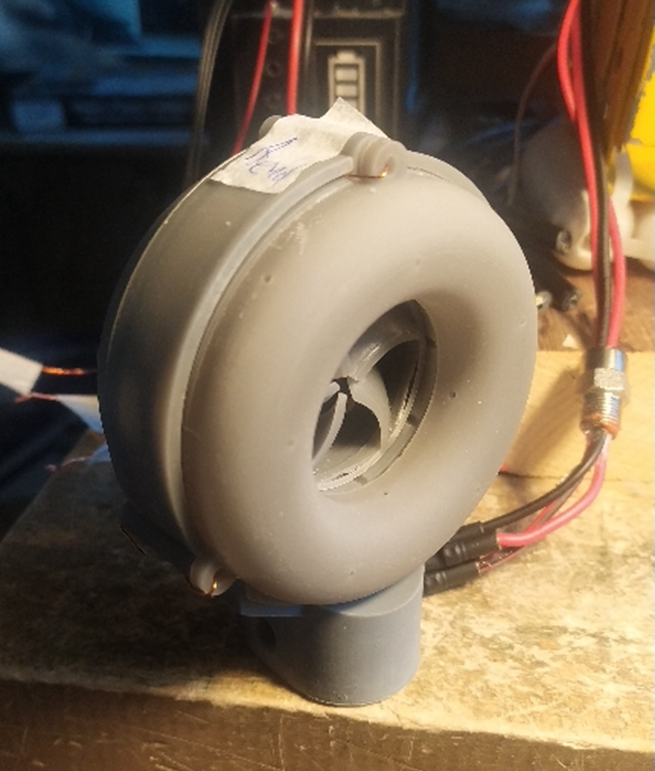
Но, очередное но, прогон под нагрузкой с моими регулями выявил трагический недостаток, при батарее 12в, оно в воде стартует очень вяло, если разогнать в воздухе, что бы двигатель вышел на режим, а потом утопить, то обороты гаснут, и двигатель останавливается, а регуль уходит в ошибку...
НО-1 если использовать батарею 6S, 24 вольта, то рвет аж огого, под водой, наверно регули заточены на такие батарейки, а если бы еще обмотки из литцендрата, то ващеее...
НО-2 диаметр сопла сильно маленький, присасывается к руке хорошо, но прокачивает слабо, а больший размер на моем чудо принтере к сожалению не получится, рабочее поле маловато...

Но принтер конечно волшебный, точность и скорость неименоверная, немножко все липко бывает, но все отмывается спиртом...
Они есть конечно и с большим рабочим полем, но ценник на них кратный... да и смола дороговата...
Всю мелочь, крепежи и прочее делал на нем, дядюшка Ляо, спасибо...
Еще бы смола подешевле была, обидно, что вроде есть отечественный производитель, в Новгороде кажись, но стандартную смолу гонит по цене как у всех, а по качеству ниже плинтуса... отделяешь от стола, модель рассыпается, у того же дядюшки Ляо смола стандартная, пытался сломать руками выращенную пластинку толщиной 3мм и размерами 1х3см... фигушки, пальцы начали ломаться...
Версия 3...
Внешняя батарея на 24 вольта, 12 А/ч, LiFePo, чуть меняем конструктив, меняем чуть положение вертикальных двигателей, тоже в принципе нюанс, летать блинчиком, или уметь пикировать,.. Пока ваяем попутно сонар, ждем лета...))

Велено котика добавить... исполняю...

Комментарии (45)


vesper-bot
03.02.2022 10:44Очень сумбурно написано, но заслуживает плюса за погружение в техчасть как минимум. Интересует, есть ли у этого «дрона» возможность выровнять пловучесть (из текста вроде как нет, на движках мол должен летать). Ещё — насколько оборотистые нужны движки? Вроде как для движения в воде на невысоких скоростях большие обороты вредны (кавитация и всё такое), главное высокая мощность на низких оборотах. Вероятно и регуляторы оборотов от этого не завелись, у них мощность относительно маленькая, так как в воздухе особо много не надо на раскручивание, а в воде наоборот.

j_aleks Автор
03.02.2022 11:06ну я помянул, что с другим регулем, от рабочего дрона, тазик воды секунд за 10 выбрасывает, при батарейке 12в... Я просто думаю, что примененные регули расчитаны на более высоковольтную батарею, хотя и заявлены что с 3S работают (12в)...
конкретно это Turnigy Plush 40A , 40А в нормальном режиме...
j_aleks Автор
03.02.2022 11:13да, про плавучесть, в управляющей пронрамме есть режим стабилизации на заданной глубине, интенсивность расхода энергии для этого будет зависеть от первичной вывеской нетральной плавучести, регулировки этого нет, так как это отельная задача зависящая от глубины погружения на текущий момент... В настоящий момент, вывешивание осуществляется балластом в виде дроби (чтобы точней вывесеть), добиваться нужно чуть-чуть положительной плавучести... дабы ежели что не утоп, а то доставать в разы сложней...
j_aleks Автор
03.02.2022 11:24Насколко высокооборотистые двигатели, в данной модели неважно, тут важней плавность регулировки, что бы подбираться "шепотом", ну а кавитация вообще ни причем, в дальние походы агрегат не годится, да и диаметр винтов небольшой, тут главное не намотать чего нибудь...

osipov_dv
04.02.2022 10:09А если всплывать за счет сжиженного газа, типа балончика co2 в балластную цистерну?
vesper-bot
03.02.2022 11:30Скорее дело в том, что они не могут раскочегарить мотор до 1016 RPM (на скриншоте min throttle) в подводном положении — это много, после чего падают в low RPM power protect, так как не рассчитаны на работу на таких оборотах. Я смотрю у них в дефолтной прошивке значения RPM кодируются 1 байтом и значат 1000+4*Х RPM, а в воде у вас типичное значение RPM будет около 100-400. Мы с отцом, когда запускали «тупой» моторчик на 5В от трех батареек 373, заметили, что он еле-еле крутится, именно по оборотам, при этом модель (надводный корабль) вполне бодро улепетывала от берега, по воспоминаниям (а было это около 1990 г.), скорость была около 1 м/с на одном моторе, правда и кораблик был сильно меньше этого дрона — около 45 см в длину, 9 в ширину и 3-4 см осадка, винт ещё на 2 см ниже сидел на валу.
Вот ещё — погуглил эти ваши Turnigy Plush 40A, там помимо прочего были указаны «совместимые модели для использования», с одной строкой «aeroplanes», т.е. без перепрошивки их использование было заранее обречено на провал. Все-таки вода и воздух — две большие разницы.j_aleks Автор
03.02.2022 12:02Вот и пришлось их перешивать, в бидерект режим, аэроплане, это отключенный бидерект, тротлы я в прошивке выставлял минимум нуль и максимум из программы управления, там таблица настройки есть... но мощи от 12вольт явно не хватает...


Dastar
03.02.2022 12:50Спасибо, отличная статья. Самому захотелось подобную подводную лодку сделать.
На ютубах, кстати, есть умельцы, которые с помощью лего делают подлодки. Они довольно интересные тем, что авторы не сразу собирают готовую модель, а показывают весь путь разработки, от самой идеи, через провальные попытки и решения проблем и до финального запуска.

Korvus
03.02.2022 13:47+2Попробуйте в качестве баластной цистерны использовать большой шприц. Где то на ютубе видел как делали небольшой дрон со шприцом внутри и носиком наружу. При заполнении шприца водой, субмарина погружается, при выкачивании воды - всплывает.
j_aleks Автор
04.02.2022 03:16Ну да, для маленьких глубин можно что ннибудь устроить с эффектом компенсационного жилета в виде изменяемого объема, но там тоже нюансы, если дайвингом занимались, должны знать, при углублении объем жилетика уменьшается, а плавучесть в целом тоже, и мы наблюдаем эффект провала, а при всплытии соответсвенно наоборот, при не учете этого можно утонуть или лопнуть...
Да и движетель для поршня могучий должен быть, да и в целом вопрос, на какой глубине шприц раздавит...
Движками проще стабилизировать, не очень энергозатратно...
wAgo
03.02.2022 13:52Что будет в результате работы ? Для чего создаётся робот - какие работы будет делать ?

Jessy_James
03.02.2022 14:41+1Думаю забавы ради. Я вот свой только наземный пытаюсь до совершенства довести уже 3-ий год.

YNK
03.02.2022 14:34"ждем лета...", а в прорубь, подледное плавание осваивать не было задумки?
j_aleks Автор
04.02.2022 03:19Можно, но страшно, жалко потом не достать если чего не так, надежность не проверена...
Кстати с проруби удобней, можно на глубокие участки выйти пешком, лодка не нужна..
Да и батарейка с этой химией обещает до -40 работать вроде...
может быть позже...
Jessy_James
05.02.2022 00:21А если леской хорошей привязать? Или все равно под корягу какую-нибудь попасть может?
j_aleks Автор
05.02.2022 07:52ну я уже в траве при первом же запуске замотался, за пачкорд(весьма тонкий и хлипкий) потихоньку выдрался, даже оптоволокно не поломалось...
Думаю заказать пачкорд метров 100, высмотрел с более толстой вставкой из синтетики какой то, а если их уговорю что-бы оплетку внешнюю сделали, то это будет вааащеее.)))
j_aleks Автор
05.02.2022 07:55на аппарат поставил такой, типа кондуктор...

дудка позволяет прои натягивании с задней полусферы избежать острых углов, которые оптика ну очень не любит...


alexsertov
03.02.2022 15:52В конце модель космолета просто! Круто!
Видел интересный проект подлодки из лего. там используется баластный модуль для погружения
https://www.youtube.com/watch?v=n83cSg3wohU
также интересный проект:
https://www.youtube.com/watch?v=MdfUSNzc0Xkj_aleks Автор
04.02.2022 03:21да, было предложено выкинуть на орбиту, в принципе меняем движки на ионные и вперед...))) А с давлением там проще -1 всего...)))
С низкой орбиты WiFi дострелит наверно...)))

Akr0n
03.02.2022 16:17Достойно. А беспроводное соединение с берегом или БС на поверхности совсем сложно будет реализовать?
vesper-bot
03.02.2022 16:50-1Сложно — по меньшей мере для нормальной связи потребуется знать частОты радиоизлучения, для которых вода прозрачна, потом собрать оборудование, излучающее на них. Беглый поиск привел на какой-то патент, где данные частоты указаны как 0.985, 1.000, 50.3, 51.8, 64.5 и 65.5 гигагерц: ТУТ. Всё что выше 10ГГц требует явно не наколенной сборки — там излучает почти что каждый проводник, можно смело отбросить в плане применения к этому дрону. Вариант около 1 ГГц — несущую можно попытаться вытравить со старой материнки для третьих "пней", если эмулировать или воткнуть в неё PIII-1000, т.е. компоненты найти можно, а судя по имеющейся там же характеристике поглощения ещё и сработает, но требует отдельного рукоприкладства. По крайней мере, оказывается осуществимо, главное потом не нарваться на любителей слушать эфир, а потом предъявлять за вещание.
narekk
03.02.2022 23:09+2Вы имеете в виду кристалы на материнских платах? Там нет таких частот. Кристалы ставятся на 100-150МГц потом в процессоре, и в другой переферии частота умножается до 1-3-5ГГц.
j_aleks Автор
04.02.2022 03:34КВЧ в принципе осваяемы, чипы в настоящий момент доступны, да, подложки с заданными параметрами фиг достанешь, как то хотел сделать фильтр (полосовой-стакан так сказать) на 2.4 гига, по размерам уперся в материал подложки, нашел в наших пенатах, НО у них пробники не купишь, а покупать вагон нет никакой необходимисти, у дядюшки Ляо, не гарантированные характеристики, полоса пропускания может съехать в неведомые направления...

vvzvlad
05.02.2022 20:04+1Вы бы с таким знанием матчасти не позорились бы. Нет в воде нормальной радио-связи, все поглощается. Только сверхнизкие частоты (типа «связь с подводными лодками») и ультразвук.
j_aleks Автор
04.02.2022 03:29Эффект воды... Хотя втретил пару фактов из разрозненных источников, один - группа физиков-экспериментаторов из там, промоделировав молекулярную структуру воды предположили наличие радиопрозрачности на частотах 100+ гигагерц, собрали установку и светили метр(вроде, а может больше) воды, даже спектрограмму выложили, и да, там сейчас нге помню, то ли 3 то ли 4 пика...
Факт-2, небезизвестная DARPA получила заказ от пентагона на средства связи в диапазоне 100+ гигагерц...
А так, вода не пропускает радиоизлучение к сожалению...
по этому оптимум, аппарат внизу, база на поплавке с подмоткой кабеля, управление на берегу, связь по воздуху берег-база, база-аппарат по шлангу...

vadimk91
03.02.2022 18:52Сегодня в новостях https://habr.com/ru/news/t/649587/
Стартап совладельца Oculus VR купил компанию по производству подводных дронов
Это просто совпадение? :)
j_aleks Автор
04.02.2022 03:42В принципе береговая полоса, это неосвоенные пампасы, у нас это точно, можете в гугл-мапе проехаться по береговой линии допустим Японии, и посмотрите нашу береговую линию, южные окраины Сахалина...
Там пирс-пирс-пирс-пирс... да с лодками разными... У нас можно медведей высмотреть...
А ведь производство мореходных лодок из стеклопластика в принципе не дорого, простейшая закрытая модель выйдет гораздо дешевле автомобиля, НО полностью отсутствует береговая инфраструктура, ангары хранения и прочая прочая прочая, и как переломить ситуацию не ясно...
Рекомендую к просмотру следующий кин...
там вообще то 5 серий про пять океанов, посему ищите ревалентные ссылки про остальные...
Вот наглядный пример правильной траты денег...
Хотя систему визуализации я бы сделал по другому, передняя полусфера в виде экрана и пара проэкторов, вау-эффект был бы гарантирован...

Bench2501
04.02.2022 09:50+1Вставлю от себя пару копеек. Тоже не спеша занимаюсь таким проектом, но более бюджетным. Двигатели взял обычные, от авиамоделей, разобрал и зазоры между сердечниками статора и ротора забил холодной сваркой, а после покрыл 3-4 слоями электроизоляционного лака и им же обработал обмотки. Подшипники после испытаний стало клинить, разобрал и понял что в них нет смазки практически, а где есть уже высохла и не выполняет свои функции. Связь будет осуществляться по кабелю через поплавок с радиоприёмником и FPV передатчиком. Погружение посредством балласта как на взрослых подводных лодках. Чтобы экономить энергию и не пугать подводных обитателей, не поднимать муть со дна. Всю историю можно посмотреть на Ютюбе, но съёмка велась эпизодически и на тапок. Корпус печатался на 3D принтере и покрыт эпоксидной смолой в пару слоев.ж

j_aleks Автор
04.02.2022 10:52ну моторы такие-же... керамических и из нерзавейки подшипников не нашлось, а вот бронзовые втулки под этот размер нашлись, забивать холодной сваркой обмотки не комильфо, пропитывать нужно, обычно статор заклеивается например малярным скотчем по периметру, как бы стакан образуется, пластилином заклеивал дырки под пождшипники, заливал эпоксидкой и под ваккум... получается монолит... без замены подшипников да в морскую воду, это будет одноразовое погружение... ну и в моем случае свобода маневра... полетать можно...))
Bench2501
04.02.2022 10:59Я не догадался о смоле когда хотел снизить трение о воду для ротора, а упоминания о переделках не нашел. Соленая вода по умолчанию очень агрессивная среда, но в пресной, нормально смазанные подшипники будут жить чуть дольше чем 1 запуск. Я погружал двигатель, включал, через пару недель проверял, состояние удовлетворительное


Mc_Key
04.02.2022 17:50Проект классный, я но блин ребята с Ardupilot как то не особо двигаются в направлении катеров, подводных судов; они больше летуны) . Я все воюю с ними что бы добавили nmea нормально, (есть гирокомпас, эхолот, ecdis, лаг, компасы твердотельный ) хочется нормальной навигации а не игрушечной ) Что касается швейцарцев с их движетелем , так это RIM называется ему 100 лет в обед(будучи курсантом в году так 2005 делали лабораторные работы по ним), они только добавили BLDC мотор; я на такой VESC ESC вешал
j_aleks Автор
05.02.2022 08:04по движкам, да, вроде так называются, но в тех что я описал, отсутствует больное место, как радиальный подшипник, да еще устойчивый к агрессивным средам, а используется эффект гидропланирования...
а по поводу навигации, и прочего морского "пакета", на родном сайте bluerobotics, есть куча плюшек по этой теме, и сонары и опроная навигация по акустическим маякам и прочее и прочее, там прослойка на малинке (компьютер компаньон) , на него вешаются плюшки, в основном на питоне, nmea помоему так же используется, по крайней мере гироакустический линк присутствует...
И в общем то, летать в воздухе сложней, упатьс больно можно, в воде со связю проблемы...
а летать проще...


AllegroMod
05.02.2022 13:22+1Начал читать статью, потому что тема показалась жутко интересной и не дочитал даже первую часть. Какие-то "регули", которые "оказались с прибабахом", выбор контролёра описан как "комплектик со всякими плюшками", а решение возникших проблем как "после некоторых танцев с бубном" (удачи читателями в использовании материала на практике) и тому подобное. Я уже не говорю про "ухрюканных енотов" и прочий жаргон для разговоров на кухне с дружбанами.
По-моему, отличный пример статьи, которая явно "по теме хабра", не придерёшься, но вот проку от неё практически никакого - ни повторить, ни даже на ус намотать что-то. Это очень хорошо заметно по комментариям, где "по технике" пишут очень мало, потому что статья сумбурная и толком сказать-то нечего.
Возможно, впрочем, этому также способствует то, что на вполне нейтральные вопросы "для чего создаётся робот" автор отвечает откровенным хамством: "а зачем Вы живете, для чего, для каких целей". Ну и зачем это было?
vagon333
Заслуживает уважения упорство в поиске решений.
Красивое решение с корпусом от фильтра воды - при открытии сразу полный доступ к конструкции.
Каково практическое применение дрона?
В поддержу проекта с удовольствем перешлю 3тр. на вашу карточку. Скиньте в личку.
Может кто-то еще захочет поддержать.
j_aleks Автор
спасибо, на данный момент в монетизации нет необходимости... просто удовлетворение любопытства... Застоялся на госслужбе наверно...)))
j_aleks Автор
ну а вкачестве практического, ну руку приделать можно, поковырять в чем нибудь, на первородном сайте есть раздел с научной программой, можно поучавствовать, но программа забугорная, интересы ихние, у нас с этими задачами к сожалению глухо...