

На протяжение тысячелетий наука занимается тем, что пытается объяснить окружающий нас мир и все что в нем есть, от флоры и фауны до процессов и явлений. Порой, достигнув понимания естественной системы, ученые хотят ее воспроизвести. Лучше всего это созидательное рвение проявляется в робототехнике. Иногда роботизированная имитация выглядит довольно правдоподобно и даже способна выполнять тот же набор основных действий, что и оригинал. Однако ей все равно не хватает, если можно так выразиться, элегантности и тонкости функционала. К примеру, возьмем в руки чашку кофе. Мы способны оценить ее температуру, примерную массу, габариты, текстуру и форму. И все эти оценочные действия происходят одновременно за счет совместной работы нескольких систем, начиная от мышечной и заканчивая нейронной. Достичь подобного спектра функционала для роботизированных рук — крайне сложная задача. Ученые из Кембриджского университета (Великобритания) разработали новый тип роботизированной руки, которая способна хватать различные предметы и не ронять их. На первый взгляд, подобное «достижение» кажется незначительным, но достигается оно за счет движения кисти робо-руки и информации, получаемой из датчиков ее кожи. Какова структура роботизированной руки, как она работает и какие действия способна выполнять? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
За последние десятилетия роботы прошли стремительный путь эволюции, одной из основных вех которой можно считать зарождение мягкой робототехники. В аспекте таких действий как захват и манипулирование объектами мягкие роботы значительно лучше справляются с пассивной адаптацией, необходимой ввиду непредсказуемости и непостоянности условий окружающей среды. Другими словами, если жесткого робота необходимо заранее запрограммировать на захват плюшевого мишки и стального куба, то мягкий сможет сделать это сам ввиду пассивной адаптации. Это хоть и утрированный пример, но все же пример.
Несмотря на развитие мягкой робототехники в аспекте ее подвижности, куда важнее сенсорное восприятие, которое позволяет расширить спектр манипуляционных возможностей роботизированных рук.
Тактильное восприятие в мягкой робототехнике обычно страдает от проблем нелинейности, низкой плотности рецепторов и / или отсутствия модульности и мягкости, что препятствует широкому внедрению какого-либо единого решения. Распределенные массивы тактильных датчиков в некоторой степени решают проблему низкой плотности, однако обычно ограничиваются гибкими печатными платами или мягкими датчиками с сильно нелинейными характеристиками. В настоящее время основной задачей в этой области является разработка сенсорных моделей, которые могут предоставлять высокоуровневую сенсорную информацию для управления с обратной связью.
Ученые отмечают, что для выполнения действия «захват» требуются два компонента: алгоритм планирования захвата и реактивный компонент, который адаптируется к неопределенностям в среде. Планирование стратегии надежного захвата ранее основывалось на моделировании. Однако из-за большой изменчивости и неопределенности в параметрах среды/роботов в последнее время предпочтение отдается подходам, основанным на данных. Но даже в этом случае большинство этих стратегий захвата опираются на квазистатические предположения. У человека же захват предмета в значительной степени зависит от пассивных свойств руки. То как мы берем предмет и удерживаем его зависит от динамического взаимодействия и не требует значительных визуальных данных. Грубо говоря, нам не обязательно пялиться на чашку чая 10 минут, чтобы взять ее в руки и не уронить.
Эти морфологические принципы были применены для разработки мягких роботизированных рук, которые требуют минимального планирования захвата и визуальной обработки для решения различных задач. Недавние исследования показали, что эти мягкие роботизированные конструкции также могут использовать человеческие знания для создания одноэтапных стратегий захвата из-за их антропоморфной природы. С помощью внутренних моделей и контактной информации эти стратегии без обратной связи могут быть преобразованы в последовательные стратегии с обратной связью, что делает контроллер более устойчивым к различным объектам.
Что касается адаптации к захвату, были проведены многообещающие исследования по обнаружению «аномалий» во время манипуляций, по обучению обнаружению ошибок с использованием последовательных нейронных сетей с визуальным вводом и по формированию основ для исправления ошибок. Одной из самых распространенных ошибок захвата у роботизированных рук является выскальзывание объекта. Чтобы адаптироваться к этому и другим типам ошибок необходима плотная тактильная информация и высокая пропускная способность контроля. Для пассивных конструкций, основанных на мягком взаимодействии, например, в случае пассивных протезов, такая высокая сенсорная и контрольная полоса пропускания редко доступны. Не говоря уже о том, что могут быть ошибки еще до момента захвата объекта.
Изображение №1
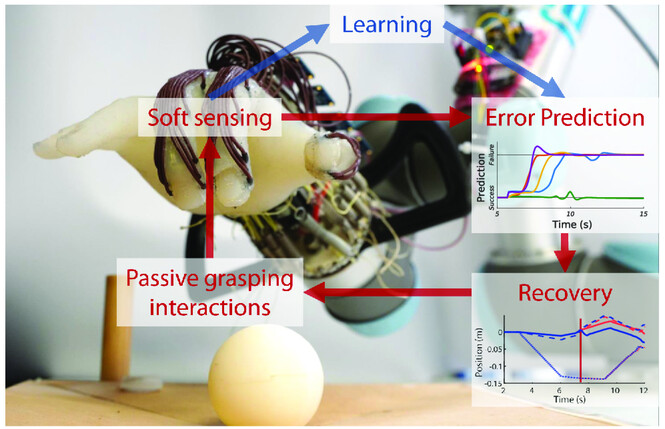
В рассматриваемом нами сегодня труде ученые описывают предиктивную оценку качества захвата в мягкой пассивной антропоморфной руке с сенсорными датчиками. Ученые обучили роботизированную руку обнаруживать и устранять ошибки захвата еще до их проявления.
Структура роботизированной руки
В основе руки легла коммерчески доступная 3D-модель, купленная на TurboSquid. Мышцы, сухожилия и связки были удалены, остался только скелет. Затем кости модифицировали для изготовления связок, расположения сухожилий и формовки кожи. Боковые связки стабилизировали каждый сустав. Для всех суставов, кроме запястно-пястного (CMC от carpometacarpal), боковые связки образовывали S-образную форму с каждой стороны, что позволяло перекатываться и предотвращало скольжение. Эти связки обеспечивали некоторое абдуктивное/аддуктивное (разведение и сведение) движение пястно-фаланговых (MCP от metacarpophalangeal) суставов. Тем не менее CMC большого пальца требовал большего диапазона движений, поэтому была добавлена дополнительная связка для стабильности при больших отклонениях. Ладонные пластины, которые предотвращают чрезмерное растяжение, были исключены из этой конструкции для упрощения изготовления (2B).

Изображение №2
Кольцевые связки пальцев были смоделированы как жесткие петли, встроенные в кости для пятисухожильной конструкции. Каждый палец имел четыре степени свободы (DoF от degrees of freedom), поэтому для управления требовалось подходящее расположение пяти антагонистических сухожилий.
Было выбрано расположение двух сухожилий сгибателей — по одному к промежуточной и дистальной фаланге, и трех сухожилий разгибателей/отводящих мышц — одно к дистальной фаланге, избегая при этом проксимально-межфалангового сустава (PIP от proximal-interphalangeal), а два других соединялись с промежуточной фалангой, проходя сбоку на MCP для разведения/сведения (2B).
Было проведено 3D-сканирование с пропорциями, аналогичными скелету. Вычитая скелет и полость вокруг каждого сустава, сканирование стало моделью мягких тканей настоящей руки. На этой модели мягких тканей моделировались чувствительные рецепторы. Каждый рецептор представлял собой L-образную трубку с изгибом стержня, который проходил вокруг костей. Четыре более коротких рецептора (2 мм) были помещены в каждый кончик пальца, где пространство было более ограниченным, они были выровнены на глубине кожи посередине между внешней поверхностью и костью, чтобы свести к минимуму любые тонкие стенки и были более чувствительны к тактильному давлению. Четыре более длинных рецептора (4 мм) располагались вокруг каждого сустава и располагались глубже под поверхностью и близко к полости сустава, поэтому были чувствительны как к тактильному давлению, так и к деформации кожи при сгибании сустава. Два дополнительных рецептора были помещены на ладонь близко к поверхности кожи, один между большим и указательным пальцами, а другой под большим пальцем. Это дало в общей сложности пятьдесят мест расположения рецепторов на ладони, большом, указательном и среднем пальцах.
К скелету была применена еще одна модификация, имитирующая ногти. Они выполняли две задачи: одна из них заключалась в улучшении способности захвата при защемлении ногтя, а другая — в стабилизации во время процесса формирования кожи.
Первым этапом производства непосредственно руки была 3D-печать компонентов. Моделирование методом послойного наплавления с помощью PLA использовалось для крепежа на запястье, а также для нижней детализированной внутренней и внешней форм. Для более детализированных частей, костей и слепков рецепторов использовалась струйная печать на Stratasys Objet500. Кости были напечатаны с помощью Stratasys Durus для прочности и ударной вязкости, а рецепторные формы были напечатаны с использованием смеси Stratasys Rigur (высокая жесткость) и Agilus (низкая жесткость) для стабильности во время формования и больших удлинений перед разрушением во время сборки формы.
Для процесса сборки скелета кости были напечатаны с помощью каркаса, удерживающего их на одном уровне во время изготовления связок, которые отламывались после завершения сборки. Связки были сформированы из гибкой трубки Festo диаметром 2 мм с твердостью по Шору D52, нарезанных на отдельные длины для каждого соединения, а затем вклеенных в монтажные отверстия моделируемой связки с использованием двухкомпонентной эпоксидной смолы Araldite. Гибкая трубка обеспечивает прочное изгибное соединение с низким сопротивлением и ограниченной растяжимостью для уменьшения вывиха сустава. Натяжные шкивы, изготовленные из одножильного медного зачищенного провода 23AWG, имели U-образную форму диаметром 2 мм и толщиной 0.6 мм. Они были вставлены в смоделированные монтажные отверстия и склеены эпоксидной смолой Araldite. Чтобы противостоять более высоким силам, шкивы для сухожилий сгибателей устанавливались в толщу кости и зацеплялись за заднюю сторону. Последним этапом сборки скелета было прикрепление крепежа для фиксации запястья и прокладка сухожилий. Сухожилия привязывались к анкерам в заранее определенных точках, а затем направлялись через шкивы к крепежному оборудованию запястья. Каждое сухожилие было пропущено через пружину и закреплено винтом на пластине для крепления руки. Жесткость пружины можно индивидуально ограничить с помощью крюков. С помощью этого метода крепления предварительное натяжение и жесткость каждого сухожилия можно настроить для различных начальных положений и поведения силы взаимодействия.
Сенсорная мягкая кожа была отлита в форму, напечатанную на 3D-принтере, с использованием двухкомпонентного силикона Smooth-on Ecoflex. После смешивания силикон вакуумировали для удаления пузырьков воздуха, затем заливали в форму и оставляли для отверждения на четыре часа. Отлитая кожа была осторожно удалена из формы, а затем помещена поверх предварительно собранного скелета как перчатка. Кожу прикрепляли к дистальным фалангам каждого пальца под ногтем с помощью Smooth-on Silpoxy. Кожа над другими суставами оставалась нескрепленной и удерживалась на месте за счет трения.
Для соединения датчиков силиконовые трубки (BS2848, твердость по Шору: A40, внутренний диаметр: 0,5 мм, внешний диаметр: 1,5 мм) были вставлены в выбранные рецепторы: 10 рецепторов на большом, указательном и среднем пальце и 2 на ладони. Трубка была проведена по тыльной стороне пальца и прикреплена к коже с помощью Silpoxy. Предпочтение отдавалось трубке как можно меньшего размера, чтобы уменьшить любую дополнительную эластичность движений пальцев, обеспечить более высокую плотность размещения датчика и повысить чувствительность за счет максимального изменения объема камеры рецептора по сравнению с общим объемом датчика.
Последним этапом сборки руки было считывание показаний датчика. Давление внутри каждого рецептора преобразовывалось датчиками абсолютного давления. Аналоговые напряжения от каждого датчика давления измерялись с помощью 16-разрядных аналого-цифровых преобразователей (ADC от analog to digital converter), способных обрабатывать 860 считываний в секунду.
Были изготовлены специальные печатные платы для монтажа и подключения датчиков давления к ADC. Восемь из этих печатных плат были установлены на защитном кожухе датчика на крепежном приспособлении для фиксации на запястье, к которому можно было надежно подключить трубки датчика (2A). Всего 32 доступных сенсорных канала были разделены на две независимые шины I2C микроконтроллера. Этот контроллер настраивает каждый ADC и сопоставляет показания датчиков, готовые для ведущего устройства.
В этой конфигурации максимальная частота дискретизации всех каналов вместе составляла 26.9 Гц, хотя для учета задержек в связи и стабилизации времени обработки ученые дискретизировали все каналы с частотой 10 Гц.
Результаты исследования
Ученые отмечают, что внедрение механического интеллекта в роботизированную руку увеличивает разнообразие поведения за счет механической сложности и избыточности. Кроме того, интеллектуальное поведение легко реализуется с помощью весьма простого контроля, особенно в обычных повторяющихся задачах, таких как захват.
Конструкция руки, показанная и описанная выше, допускает значительный диапазон движений, включая отведение большого пальца, устойчивость к ударам и вывихам, сохраняя при этом управляемость и пассивно-адаптивное поведение.
Изображение №3
Сенсорные кожные рецепторы действуют по закону идеального газа. Воздушные камеры, расположенные в мягкой коже, деформируются при тактильных нагрузках или сгибании суставов (2C). Изменение объема соответствует изменению давления, измеренному барометрическими датчиками, установленными на запястье (2A). Кожа имеет разрешение 0.69 мН с 16-битным ADC, диапазон силы 23–5800 мН и время отклика до 1 мс.

Изображение №4
Предыдущее исследование продемонстрировало адаптивность скелетной рукой в рамках пассивного захвата с последовательными взаимодействиями посредством контроля запястья. Роботизированная рука способна захватывать сферы диаметром 25-75 мм за одну демонстрацию с общим показателем успеха 57.7%, а адаптация запястья способствует увеличению успешности захвата до 86% по сравнению с простым управлением без обратной связи.
На снимках выше показаны некоторые возможности исследуемой пассивной системы. Для успешного выполнения многих задач важную роль играет высокая степень контроля положения руки и пальцев. Используя тест Капанджи для оценки диапазона движения большого пальца, на 4A показана успешная установка позы в крайние положения в тесте.
Кроме того, интеллектуальное поведение в руке можно использовать для более надежного хватания или обеспечения новых взаимодействий. На 4B показано сгибание указательного пальца. Из-за расположения сухожилия и конструкции сустава при надавливании пальцем на основание кончик пальца отклоняется в сторону силы. Этот отрицательный изгиб, подобный эффекту плавников, усиливает пассивную адаптацию формы.

Эффект плавника (finray effect): a – первичная конструкция; b — сила заставляет стороны конструкции изгибаться, в результате чего основание и кончики деформируются в направлении приложенной нагрузки.
На 4C показана жесткость, зависящая от положения. Из-за геометрии кости в области соединения суставов движения разведения/сведения в согнутом положении ограничено по сравнению с выпрямленным положением, подобно человеческой руке. Это можно использовать во время захвата, когда при формировании захвата полезна более низкая жесткость, тогда как при удержании предпочтительна более высокая жесткость.
Чтобы оценить адаптивный захват, усиленный мягкой сенсорной кожей, заданные траектории были протестированы на повседневных объектах того же размера, что и тренировочный объект, используемый во время кинестетического обучения. Рука в частично закрытом положении совершала серию взаимодействий со сферой диаметром 60 мм (видео №1).
Видео №1
Основным ограничением конструкции, управляемой запястьем, является субъективная ручная обработка траектории. Наличие сенсорной информации может обеспечить автоматизацию и объективизацию действий, выполненных вручную, таких как извлечение ключевых точек и классификация взаимодействия.
Во время тестов использовалось 14 различных объектов захвата. Три из них роботизированная рука не смогла захватить, так как они были либо слишком маленькие, либо слишком большие. Причиной не успешности в данных случаях является конкретное исходное положение руки и траектория движения, так как сила захвата в этом случае диктуется силой упругости от деформаций указательного и большого пальцев.
Остальные объекты показали переменную вероятность успеха. Ученые отмечают, что рука не имела никакой информации касательно положения или габаритов объекта до начала захвата, т. е. ее действия были полностью адаптивными. Лучшие результаты по захвату роботизированная рука показала в тестах с деформируемой пузырчатой пленкой, малой сферой, пачкой молотого кофе (этот объект был на 550% тяжелее того, что применялся в ходе обучения) и деревянный брусок.
Видео №2: успешные захваты объектов.
Видео №3: неудачные захваты объектов.
Траектория, показанная на 4B, использовалась для большинства экспериментов. Ожидалось, что рука сможет адаптироваться и совершать захват объекта из различных начальных состояний, например, в условиях неопределенности положения объекта. Такая тактика захвата искажается для создания обучающих данных.
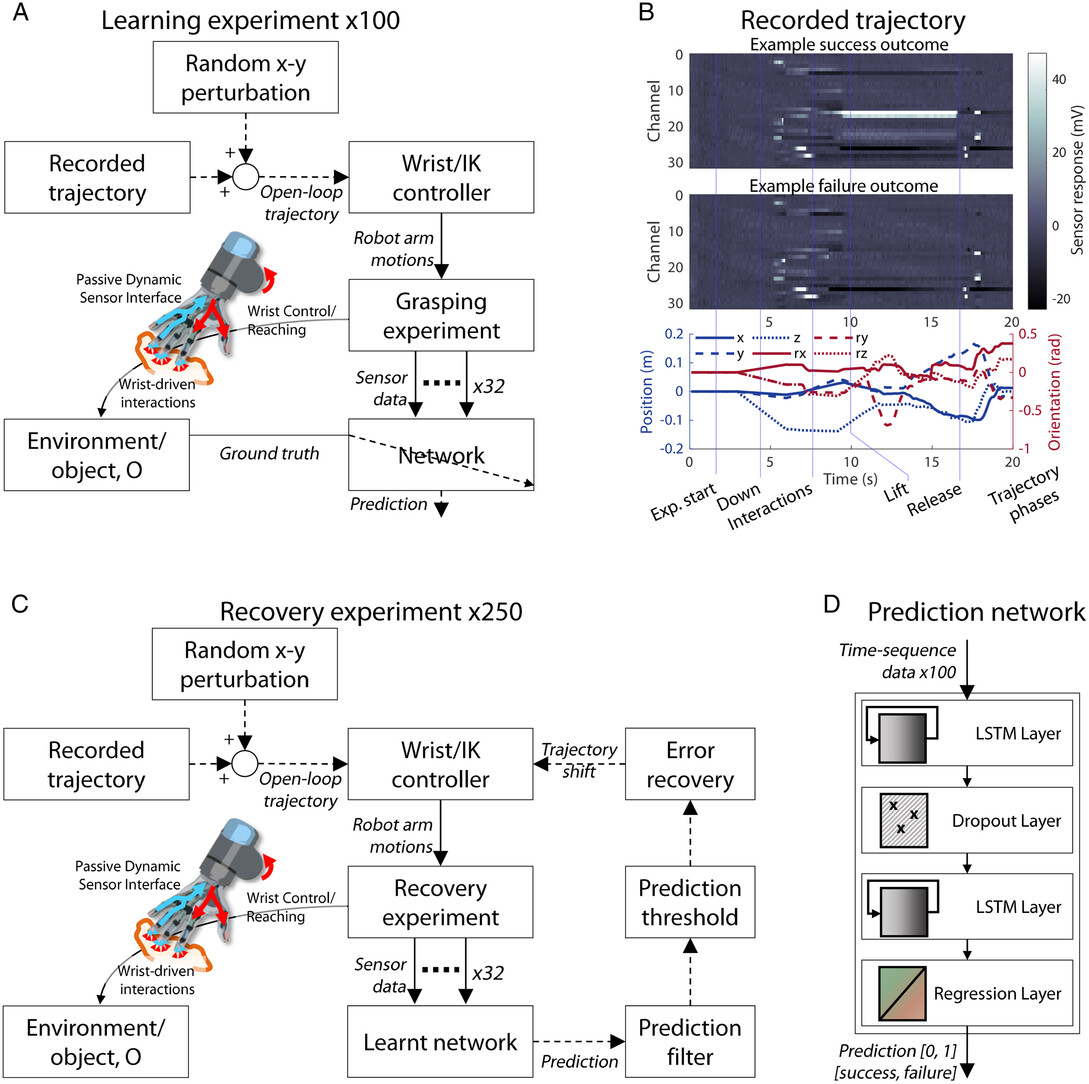
Поскольку тактика захвата представляет собой траекторию без обратной связи, совокупность данных датчиков с момента начала контакта указывает на будущие результаты. Для предсказания результатов захвата в режиме реального времени использовалась LSTM (от long short-term memory) сеть (3D). Несмотря на то, что маркировка набора данных для обучения может быть выполнена только после окончания каждого эпизода захвата (3A), структура обучения побуждает сеть прогнозировать результаты захвата как можно раньше. Скорость обнаружения и его достоверность зависят от характера неудачи (невыполнения захвата). Пример прогнозирования сети для различных результатов захвата показан на 3B.
Изображение №5
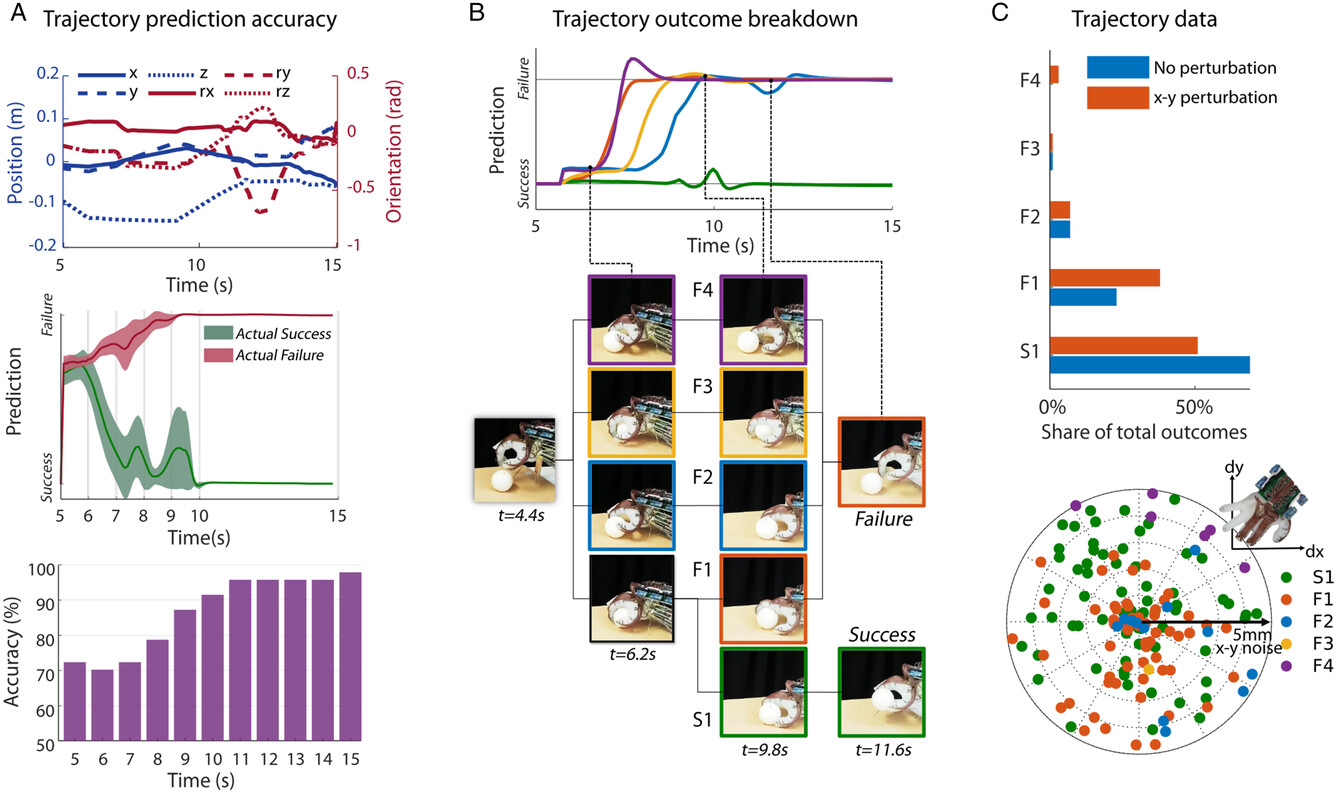
Точность прогнозирования по отношению к длительности сенсорных данных в тестовом наборе дает представление о максимальной точности, достижимой при текущей настройке и данных обучения (нижний график на 5A). Учитывая всю последовательность сенсорных данных после старта (время > 10 с), обученная сеть может предсказать окончательный результат с очень высокой точностью. Чем меньше продолжительность данных, тем ниже была точность предсказаний сети. Тем не менее большинство случаев неудачного захвата по-прежнему прогнозировались на ранней стадии и с большей достоверностью, что крайне важно для восстановления после неудачи (в центре на 5A).
Ученые также отмечают, что их роботизированная рука, будучи антропоморфной, соответственно обладает множеством различных вариантов захвата одного и того же объекта. Траекторий движения для реализации конкретного захвата также несколько.
Ученые решили выявить, какие траектории имеют наибольшую вероятность неудачного захвата (3B). На 5C показаны результаты испытания 200 захватов. Первые 100 попыток (сверху на 5C) следуют одной и той же траектории без искусственно добавленного возмущения, а в последних 100 испытаниях применяется случайное возмущение стола, чтобы имитировать неопределенность в местоположении объекта захвата. Первые 100 испытаний показали успех в 69% случаев, во второй группе испытаний это значение упало до 51%. Неудачные захваты распределяются по четырем различным режимам (5B), причем первый режим является общим. Факт неудачного захвата в случае отсутствия дополнительного возмущения указывает на наличие других источников неопределенности, наиболее вероятным из которых является исходное положение руки, при котором трение в суставах и сухожилиях может привести к гистерезису положения.
Видео №4: нейронная сеть тестировалась в ходе 250 испытаний.
Видео №5: успешные захваты в ходе испытаний.
Во время опытов была обнаружена и вторая траектория движения, которая продемонстрировала гораздо более высокий уровень успеха, чем траектория, использованная для остальных экспериментов. В ходе дополнительных 200 испытаний (100 без возмущений и 100 с возмущениями) было установлено, что в случае отсутствия возмущений траектория приводила к 100% успешности захватов. Это свидетельствует о том, что она устойчива к неопределенностям в исходном положении руки и что траектории могут быть оптимизированы для конкретных условий (видео №5).
Однако при добавлении возмущений успешность захвата упала до 67%. Стоит отметить, что из 67 успешных захватов три были реализованы уникальным образом (захват всей кистью а не «щипком» большого и указательного пальца). Это свидетельствует о наличии пассивной адаптации, что приводит к поведенческому разнообразию.
Следующий этап исследования заключался в изучении восстановления после безуспешного захвата. Другими словами, если первоначальная попытка захвата объекта (с учетом первичного положения руки и траектории движения) не увенчалась успехом, то как должна действовать рука, чтобы все таки схватить объект.
Большинство неудачных попыток захвата объекта являются результатом ошибки на ранних этапах формирования захвата, обнаружение которых может привести к быстрому восстановлению без необходимости в повторении захвата (видео №6).
Видео №6: неудачные попытки захвата и связи с предсказанием неудач.
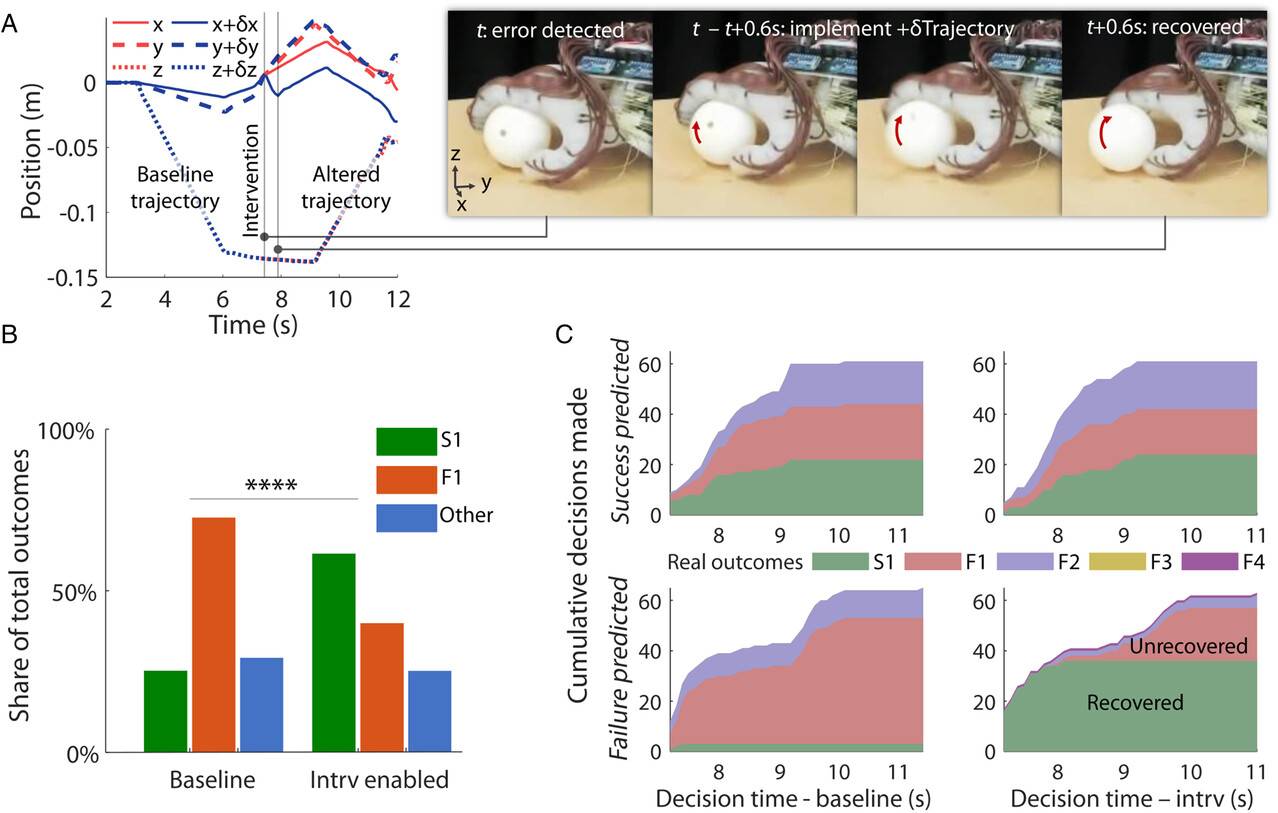
На 5C видно, что первый режим отказа является наиболее распространенным. В этом режиме сфера попадает под указательный палец и стол, а не находится в более стабильном контакте с большим пальцем (5B). Это приводит к нарастанию давления, которое при сбросе выбивает сферу из захвата. Вводится эвристический метод восстановления, который вмешивается со сдвигом на траекторию, когда прогноз отказа является «определенным». Этот сдвиг снимает давление, выкатывая сферу из-под указательного пальца и приводя ее в контакт с большим пальцем (6A). Стоит отметить, что восстановление может начаться в любой момент времени, когда прогнозируемость неудачи превышает пороговое значение (видео №7).
Видео №7: восстановительная тактика.
Изображение №6
Далее ученые оценили работу системы при одновременной работе функции прогнозирования ошибок и функции восстановления (6B). Как и ранее, был набор испытаний без вмешательства извне и набор с вмешательством.
При наличии вмешательства количество успешных захватов увеличилось с 25 до 60, а количество неудач уменьшилось с 72 до 39. Наблюдение за временем принятия решений для различных прогнозов и реальных результатов подтверждает эффект восстановительного вмешательства (6C). Во-первых, формы общего кумулятивного подсчета прогнозов почти идентичны между базовым режимом и режимом вмешательства. Во-вторых, для прогнозов успеха, когда восстановление не происходит ни в исходном состоянии, ни в случае вмешательства, распределение реальных результатов находится в среднем в пределах 13%. Таким образом, разница в реальных результатах при предсказании неудачи очевидна.
Ученые отмечают, что система прогнозирование ошибок обучалась посредством испытаний по захвату сфер 60 мм в диаметре, но успех захвата потенциально определяется основными шаблонами в показаниях датчиков, которые не являются уникальными для сфер. Другими словами, данная система может так же успешно работать и с другими объектами.
Видео №8: влияние возмущений на предсказание неудачных захватов и восстановительную тактику.
Были проведены сравнительные опыты по степени предсказания с применением различных предметов. Наиболее точные прогнозы были получены для сфер 50 мм (100%), батареек (90%) и катушек (80%). Наименьшая точность наблюдалась для сфер диаметром 70 мм (50%), пузырчатой пленки (20%) и бутылок (20%).
Окончательный прогноз сети (через 15 с) имеет 100% точность (50 из 50) для базовых случаев, когда сбой был предсказан правильно, для случаев вмешательства, когда сбой был предсказан, но не устранен, окончательный прогноз был правильным на 100% (21 из 21), для случаев, когда вмешательство было успешным, прогноз правильно обновлялся до успеха в 97% (35 из 36) случаев. Прогнозы неудачного захвата были сделаны в среднем за 7.403 секунды.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых.
Эпилог
В рассмотренном нами сегодня труде ученые продемонстрировали мягкую роботизированную руку, которая могла хватать различные предметы и предсказывать, уронит она их или нет.
Для человека манипулирование различными объектами является обычной задачей. Мы каждый день держим в руках множество разнообразных по форме, массе и текстуре предметов. При этом мы заранее знаем какую силу приложить для захвата, какие движения кистью и пальцами нужно сделать, чтобы предмет не выпал из рук. Для роботов это настоящий кошмар. Если в базе данных робота не заложены параметры, к примеру, поднятия чашки чая, то он может либо упустить ее (слишком малая сила захвата), либо расплескать по всей комнате (слишком резкая траектория движения). И даже если робот может проанализировать ситуацию и принять верное решение, то этот процесс занимает немало времени и требует достаточно энергии.
Ученые разработали роботизированную руку, основанную на пассивном движении, которая может не только хватать объекты, но и предсказать, уронит она его или нет. На основе предсказаний могут производиться адаптационные действия, чтобы предотвратить неудачный захват объекта.
В качестве основы использовалась напечатанная на 3D-принтере рука с имплантированными тактильными датчиками, позволяющими ей чувствовать то, с чем она взаимодействует. Движения руки были весьма ограничены — только пассивные движения запястья.
В совокупности было проведено более 1200 испытаний, в ходе которых рука хватала различные объекты. Сначала использовались небольшие пластиковые шарики, хватать которые рука обучалась заранее на примере людей. Тактильные датчики позволяли руке чувствовать насколько хорошо шарик зафиксирован и нет ли проскальзывания. Затем были испытания с другими предметами (персик, компьютерная мышь, пузырчатая пленка и т. д.).
По сути, робот использует данные по тому или иному движению и набор данных от датчиков, чтобы принять решение — успешным ли будет захват. Если предсказание говорит, что захват будет безуспешным, то робот может адаптироваться, чтобы избежать провала.
Ученые отмечают, что их система уникальна тем, что лишена каких-либо проводов. Она достаточно примитивна, но это намеренное решение. Определив, как робот со столь простой структурой справляется с поставленной задачей, будет гораздо проще сконструировать более сложного робота, который будет обладать более сложным поведением.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?
CrazyYogin
Маленькая придирочка. «На протяжение тысячелетий наука занимается тем, что пытается объяснить окружающий нас мир и все что в нем есть, от флоры и фауны до процессов и явлений.» Науке в современном понимании всего 300 лет максимум.