
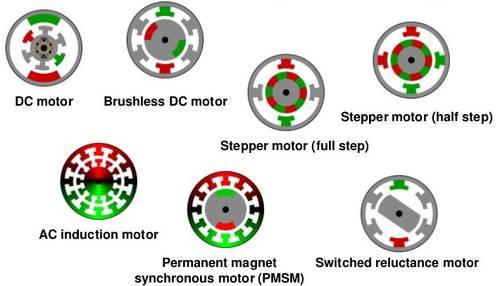
Каждый электродвигатель обладает некоторыми отличительными свойствами, которые обуславливают его область применения, в которой он наиболее выгоден. Синхронные, асинхронные, постоянного тока, коллекторные, бесколлекторные, вентильно-индукторные, шаговые… Почему бы, как в случае с двигателями внутреннего сгорания, не изобрести пару типов, довести их до совершенства и ставить их и только их во все применения? Давайте пройдемся по всем типам электродвигателей, а в конце обсудим, зачем же их столько и какой двигатель «самый лучший».
Двигатель постоянного тока (ДПТ)

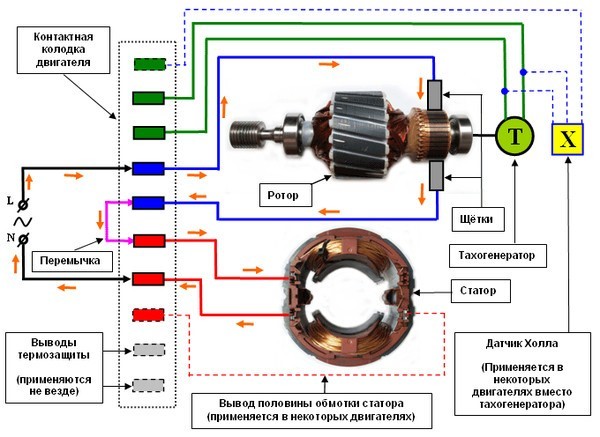
С этим двигателем все должны быть знакомы с детства, потому что именно этот тип двигателя стоит в большинстве старых игрушек. Батарейка, два проводка на контакты и звук знакомого жужжания, вдохновляющего на дальнейшие конструкторские подвиги. Все ведь так делали? Надеюсь. Иначе эта статья, скорее всего, не будет вам интересна. Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.
Двигатели постоянного тока бывают как очень маленького размера («вибра» в телефоне), так и довольно большого – обычно до мегаватта. Например, на фото ниже показан тяговый электродвигатель электровоза мощностью 810кВт и напряжением 1500В.

Почему ДПТ не делают мощнее? Главная проблема всех ДПТ, а в особенности ДПТ большой мощности – это коллекторный узел. Скользящий контакт сам по себе является не очень хорошей затеей, а скользящий контакт на киловольты и килоамперы – и подавно. Поэтому конструирование коллекторного узла для мощных ДПТ – целое искусство, а на мощности выше мегаватта сделать надежный коллектор становится слишком сложно (рекорд — 12,5МВт).
В потребительском качестве ДПТ хорош своей простотой с точки зрения управляемости. Его момент прямо пропорционален току якоря, а частота вращения (по крайней мере холостой ход) прямо пропорциональна приложенному напряжению. Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Также нужно упомянуть, как именно в ДПТ формируется магнитный поток возбуждения, с которым взаимодействует якорь (ротор) и за счет этого возникает вращающий момент. Этот поток может делаться двумя способами: постоянными магнитами и обмоткой возбуждения. В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже. Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
Универсальный коллекторный двигатель
Как ни странно, это самый распространенный в быту электродвигатель, название которого наименее известно. Почему так получилось? Его конструкция и характеристики такие же, как у двигателя постоянного тока, поэтому упоминание о нем в учебниках по приводу обычно помещается в самый конец главы про ДПТ. При этом ассоциация коллектор = ДПТ так прочно заседает в голове, что не всем приходит на ум, что двигатель постоянного тока, в названии которого присутствует «постоянный ток», теоретически можно включать в сеть переменного тока. Давайте разберемся.
Как изменить направление вращения двигателя постоянного тока? Это знают все, надо сменить полярность питания якоря. А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
Этот тип двигателей наиболее широко распространен в бытовой технике, где требуется регулировать частоту вращения: дрели, стиральные машины (не с «прямым приводом»), пылесосы и т.п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
Асинхронный электродвигатель
 Еще более распространенным, чем коллекторные двигатели, является асинхронный двигатель. Только распространен он в основном в промышленности – где присутствует трехфазная сеть. Про принцип его работы написана отдельная статья. Если кратко, то его статор – это распределенная двухфазная или трехфазная (реже многофазная) обмотка. Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор можно представлять себе в виде медного или алюминиевого цилиндра, внутри которого находится железо магнитопровода. К ротору в явном виде напряжение не подводится, но оно индуцируется там за счет переменного поля статора (поэтому двигатель на английском языке называют индукционным). Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.
Еще более распространенным, чем коллекторные двигатели, является асинхронный двигатель. Только распространен он в основном в промышленности – где присутствует трехфазная сеть. Про принцип его работы написана отдельная статья. Если кратко, то его статор – это распределенная двухфазная или трехфазная (реже многофазная) обмотка. Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор можно представлять себе в виде медного или алюминиевого цилиндра, внутри которого находится железо магнитопровода. К ротору в явном виде напряжение не подводится, но оно индуцируется там за счет переменного поля статора (поэтому двигатель на английском языке называют индукционным). Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.Почему асинхронный двигатель так популярен? У него нет скользящего контакта, как у коллекторного двигателя, а поэтому он более надежен и требует меньше обслуживания. Кроме того, такой двигатель может пускаться от сети переменного тока «прямым пуском» – его можно включить коммутатором «на сеть», в результате чего двигатель запустится (с большим пусковым током 5-7 крат, но допустимым). ДПТ относительно большой мощности так включать нельзя, от пускового тока погорит коллектор. Также асинхронные привода, в отличие от ДПТ, можно делать гораздо большей мощности – десятки мегаватт, тоже благодаря отсутствию коллектора. При этом асинхронный двигатель относительно прост и дешев.
Асинхронный двигатель применяется и в быту: в тех устройствах, где не нужно регулировать частоту вращения. Чаще всего это так называемые «конденсаторные» двигатели, или, что тоже самое, «однофазные» асинхронники. Хотя на самом деле с точки зрения электродвигателя правильнее говорить «двухфазные», просто одна фаза двигателя подключается в сеть напрямую, а вторая через конденсатор. Конденсатор делает фазовый сдвиг напряжения во второй обмотке, что позволяет создать вращающееся эллиптическое магнитное поле. Обычно такие двигатели применяются в вытяжных вентиляторах, холодильниках, небольших насосах и т.п.
Минус асинхронного двигателя по сравнению с ДПТ в том, что его сложно регулировать. Асинхронный электродвигатель – это двигатель переменного тока. Если асинхронному двигателю просто понизить напряжение, не понизив частоту, то он несколько снизит скорость, да. Но у него увеличится так называемое скольжение (отставание частоты вращения от частоты поля статора), увеличатся потери в роторе, из-за чего он может перегреться и сгореть. Можно представлять это себе как регулирование скорости движения легкового автомобиля исключительно сцеплением, подав полный газ и включив четвертую передачу. Чтобы правильно регулировать частоту вращения асинхронного двигателя нужно пропорционально регулировать и частоту, и напряжение. А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.
Синхронный электродвигатель

 Про принцип работы синхронного двигателя также была отдельная статья. Синхронных приводов бывает несколько подвидов – с магнитами (PMSM) и без (с обмоткой возбуждения и контактными кольцами), с синусоидальной ЭДС или с трапецеидальной (бесколлекторные двигатели постоянного тока, BLDC). Сюда же можно отнести некоторые шаговые двигатели. До эры силовой полупроводниковой электроники уделом синхронных машин было применение в качестве генераторов (почти все генераторы всех электростанций – синхронные машины), а также в качестве мощных приводов для какой-либо серьезной нагрузки в промышленности.
Про принцип работы синхронного двигателя также была отдельная статья. Синхронных приводов бывает несколько подвидов – с магнитами (PMSM) и без (с обмоткой возбуждения и контактными кольцами), с синусоидальной ЭДС или с трапецеидальной (бесколлекторные двигатели постоянного тока, BLDC). Сюда же можно отнести некоторые шаговые двигатели. До эры силовой полупроводниковой электроники уделом синхронных машин было применение в качестве генераторов (почти все генераторы всех электростанций – синхронные машины), а также в качестве мощных приводов для какой-либо серьезной нагрузки в промышленности.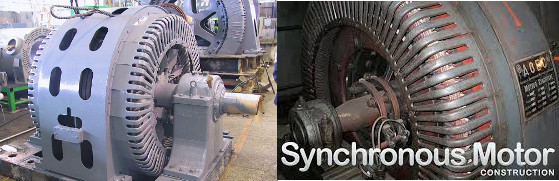
Все эти машины выполнялись с контактными кольцами (можно увидеть на фото), о возбуждении от постоянных магнитов при таких мощностях речи, конечно же, не идет. При этом у синхронного двигателя, в отличие от асинхронного, большие проблемы с пуском. Если включить мощную синхронную машину напрямую на трехфазную сеть, то всё будет плохо. Так как машина синхронная, она должна вращаться строго с частотой сети. Но за время 1/50 секунды ротор, конечно же, разогнаться с нуля до частоты сети не успеет, а поэтому он будет просто дергаться туда-сюда, так как момент получится знакопеременный. Это называется «синхронный двигатель не вошел в синхронизм». Поэтому в реальных синхронных машинах применяют асинхронный пуск – делают внутри синхронной машины небольшую асинхронную пусковую обмотку и закорачивают обмотку возбуждения, имитируя «беличью клетку» асинхронника, чтобы разогнать машину до частоты, примерно равной частоте вращения поля, а уже после этого включается возбуждение постоянным током и машина втягивается в синхронизм.
И если у асинхронного двигателя регулировать частоту ротора без изменения частоты поля хоть как-то можно, то у синхронного двигателя нельзя никак. Он или крутится с частой поля, или выпадает из синхронизма и с отвратительными переходными процессами останавливается. Кроме того, у синхронного двигателя без магнитов есть контактные кольца – скользящий контакт, чтобы передавать энергию на обмотку возбуждения в роторе. С точки зрения сложности, это, конечно, не коллектор ДПТ, но всё равно лучше бы было без скользящего контакта. Именно поэтому в промышленности для нерегулируемой нагрузки применяют в основном менее капризные асинхронные привода.
Но все изменилось с появлением силовой полупроводниковой электроники и микроконтроллеров. Они позволили сформировать для синхронной машины любую нужную частоту поля, привязанную через датчик положения к ротору двигателя: организовать вентильный режим работы двигателя (автокоммутацию) или векторное управление. При этом характеристики привода целиком (синхронная машина + инвертор) получились такими, какими они получаются у двигателя постоянного тока: синхронные двигатели заиграли совсем другими красками. Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
Вентильно-индукторный двигатель с самовозбуждением (ВИД СВ, SRM)
У него много названий. Обычно его коротко называют вентильно-индукторный двигатель (ВИД) или вентильно-индукторная машина (ВИМ) или привод (ВИП). В английской терминологии это switched reluctance drive (SRD) или motor (SRM), что переводится как машина с переключаемым магнитным сопротивлением. Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы на кафедре электропривода в МЭИ, а также на фирме ООО «НПФ ВЕКТОР» называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).

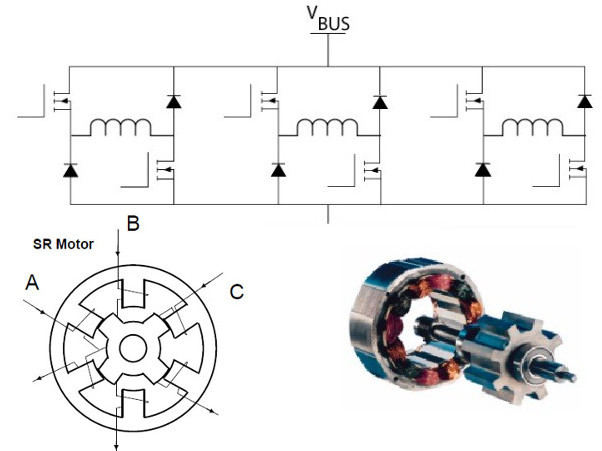
Конструктивно это самый простой двигатель и по принципу действия похож на некоторые шаговые двигатели. Ротор – зубчатая железка. Статор – тоже зубчатый, но с другим числом зубцов. Проще всего принцип работы поясняет вот эта анимация:
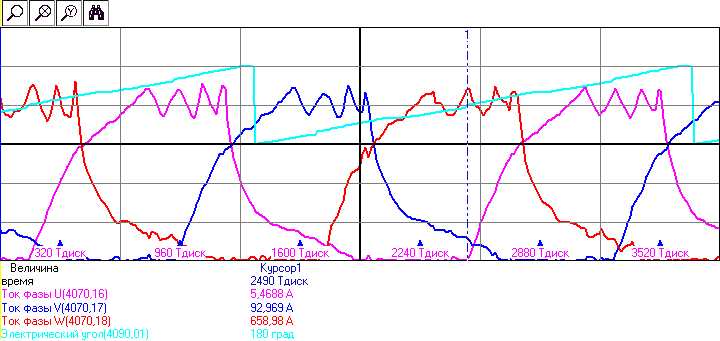
Подавая постоянный ток в фазы в соответствии с текущим положением ротора можно заставить двигатель вращаться. Фаз может быть разное количество. Форма тока реального привода для трех фаз показа на рисунке (токоограничение 600А):
Однако за простоту двигателя приходится платить. Так как двигатель питается однополярными импульсами тока, напрямую «на сеть» его включать нельзя. Обязательно требуется преобразователь и датчик положения ротора. Причем преобразователь не классический (типа шестиключевой инвертор): для каждой фазы у преобразователя для SRD должны быть полумосты, как на фото в начале этого раздела. Проблема в том, что для удешевления комплектующих и улучшения компоновки преобразователей силовые ключи и диоды часто не изготавливаются отдельно: обычно применяются готовые модули, содержащие одновременно два ключа и два диода – так называемые стойки. И именно их чаще всего и приходится ставить в преобразователь для ВИД СВ, половину силовых ключей просто оставляя незадействованной: получается избыточный преобразователь. Хотя в последние годы некоторые производители IGBT модулей выпустили изделия, предназначенные именно для SRD.
Следующая проблема – это пульсации вращающего момента. В силу зубчатой структуры и импульсного тока момент редко получается стабильным – чаще всего он пульсирует. Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Однако даже при этих недостатках двигатели остаются перспективными в качестве регулируемого привода. Благодаря их простоте сам двигатель получается дешевле классического асинхронного двигателя. Кроме того, двигатель легко сделать многофазным и многосекционным, разделив управление одним двигателем на несколько независимых преобразователей, которые работают параллельно. Это позволяет повысить надежность привода – отключение, скажем, одного из четырех преобразователей не приведет к остановке привода в целом – трое соседей будут какое-то время работать с небольшой перегрузкой. Для асинхронного двигателя такой фокус выполнить так просто не получается, так как невозможно сделать несвязанные друг с другом фазы статора, которые бы управлялись отдельным преобразователем полностью независимо от других. Кроме того, ВИД очень хорошо регулируются «вверх» от основной частоты. Железку ротора можно раскручивать без проблем до очень высоких частот.
Мы на фирме ООО «НПФ ВЕКТОР» выполнили несколько проектов на базе этого двигателя. Например, делали небольшой привод для насосов горячего водоснабжения, а также недавно закончили разработку и отладку системы управления для мощных (1,6 МВт) многофазных резервируемых приводов для обогатительных фабрик АК «АЛРОСА». Вот машинка на 1,25 МВт:

Вся система управления, контроллеры и алгоритмы были сделаны у нас в ООО «НПФ ВЕКТОР», силовые преобразователи спроектировала и изготовила фирма ООО «НПП «ЦИКЛ+». Заказчиком работы и проектировщиком самих двигателей являлась фирма ООО «МИП «Мехатроника» ЮРГТУ (НПИ)».
Вентильно-индукторный двигатель с независимым возбуждением (ВИД НВ)
Это совсем другой тип двигателя, отличающийся по принципу действия от обычного ВИД. Исторически известны и широко используются вентильно-индукторные генераторы такого типа, применяемые на самолетах, кораблях, железнодорожном транспорте, а вот именно двигателями такого типа почему-то занимаются мало.
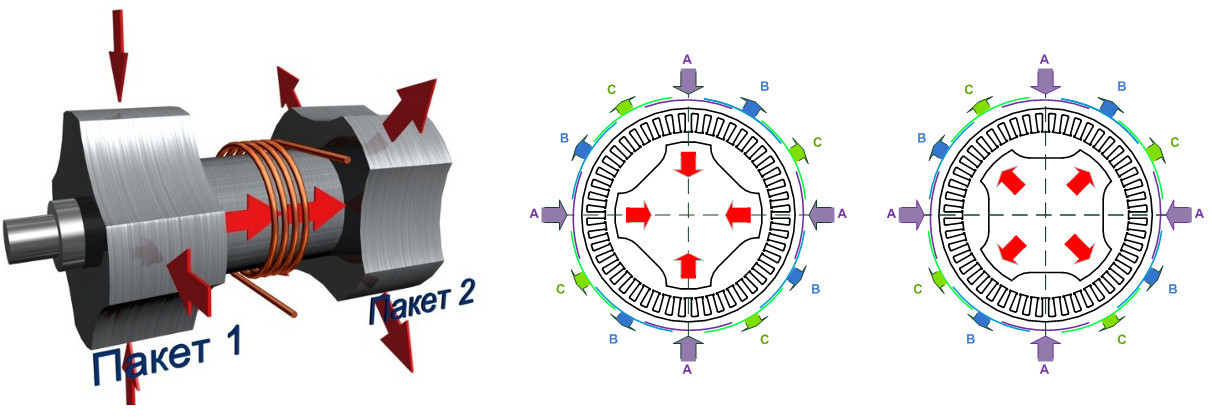
На рисунке схематично показана геометрия ротора и магнитный поток обмотки возбуждения, а также изображено взаимодействие магнитных потоков статора и ротора, при этом ротор на рисунке установлен в согласованное положение (момент равен нулю).
Ротор собран из двух пакетов (из двух половинок), между которыми установлена обмотка возбуждения (на рисунке показана как четыре витка медного провода). Несмотря на то, что обмотка висит «посередине» между половинками ротора, крепится она к статору и не вращается. Ротор и статор выполнены из шихтованного железа, постоянные магниты отсутствуют. Обмотка статора распределенная трехфазная – как у обычного асинхронного или синхронного двигателя. Хотя существуют варианты такого типа машин с сосредоточенной обмоткой: зубцами на статоре, как у SRD или BLDC двигателя. Витки обмотки статора охватывают сразу оба пакета ротора.
Упрощенно принцип работы можно описать следующим образом: ротор стремится повернуться в такое положение, при котором направления магнитного потока в статоре (от токов статора) и роторе (от тока возбуждения) совпадут. При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).
С точки зрения управления ВИД НВ оказывается эквивалентен синхронной машине с контактными кольцами. То есть, если вы не знаете конструкцию этой машины и используете её как «черный ящик», то она ведет себя практически неотличимо от синхронной машины с обмоткой возбуждения. Можно сделать векторное управление или автокоммутацию, можно ослаблять поток возбуждения для повышения частоты вращения, можно усиливать его для создания большего момента – всё так, как будто это классическая синхронная машина с регулируемым возбуждением. Только ВИД НВ не имеет скользящего контакта. И не имеет магнитов. И ротор в виде дешевой железной болванки. И момент не пульсирует, в отличие от SRD. Вот, например, синусоидальные токи ВИД НВ при работе векторного управления:

Кроме того, ВИД НВ можно создавать многофазным и многосекционным, аналогично тому, как это делается в ВИД СВ. При этом фазы оказываются несвязанными друг с другом магнитными потоками и могут работать независимо. Т.е. получается как будто бы несколько трехфазных машин в одной, к каждой из которых присоединяется свой независимый инвертор с векторным управлением, а результирующая мощность просто суммируется. Координации между преобразователями при этом не требуется никакой – только общее задание частоты вращения.
Минусы этого двигателя тоже есть: напрямую от сети он крутиться не может, так как, в отличие от классических синхронных машин, ВИД НВ не имеет асинхронной пусковой обмотки на роторе. Кроме того, он сложнее по конструкции, чем обычный ВИД СВ (SRD).
На основе данного двигателя мы также сделали несколько успешных проектов. Например, один из них – это серия приводов насосов и вентиляторов для районных теплостанций г. Москвы мощностью 315-1200кВт (ссылка на проект). Это низковольтные (380В) ВИД НВ с резервированием, где одна машина «разбита» на 2, 4 или 6 независимых трехфазных секций. На каждую секцию ставится свой однотипный преобразователь с векторным бездатчиковым управлением. Таким образом можно легко наращивать мощность на базе однотипной конструкции преобразователя и двигателя. При этом часть преобразователей подключено к одному вводу питания районной теплостанции, а часть к другому. Поэтому если происходит «моргушка питания» по одному из вводов питания, то привод не встает: половина секций кратковременно работают в перегрузке, пока питание не восстановится. Как только оно восстанавливается, на ходу в работу автоматически вводятся отдыхавшие секции. Вообще, наверное, этот проект заслуживал бы отдельной статьи, поэтому пока про него закончу, вставив фото двигателя и преобразователей:

Заключение: какой же электродвигатель самый лучший?
К сожалению, двумя словами здесь не обойтись. И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.
Давайте рассмотрим регулируемый электропривод, режим работы которого – длительный. Коллекторные машины здесь сразу исключаются из конкуренции по причине ненадежности коллекторного узла. Но остались еще четыре – синхронный, асинхронный, и два типа вентильно-индукторных. Если мы говорим о приводе насоса, вентилятора и чего-то похожего, что используется в промышленности и где масса и габариты особо не важны, то здесь из конкуренции выпадают синхронные машины. Для обмотки возбуждения требуются контактные кольца, что является капризным элементом, а постоянные магниты очень дороги. Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Как показывает опыт, все три типа машин успешно применяются. Но – асинхронный привод невозможно (или очень сложно) секционировать, т.е. разбить мощную машину на несколько маломощных. Поэтому для обеспечения большой мощности асинхронного преобразователя требуется делать его высоковольтным: ведь мощность – это, если грубо, произведение напряжения на ток. Если для секционируемого привода мы можем взять низковольтный преобразователь и наставить их несколько, каждый на небольшой ток, то для асинхронного привода преобразователь должен быть один. Но не делать же преобразователь на 500В и ток 3 килоампера? Это провода нужны с руку толщиной. Поэтому для увеличения мощности повышают напряжение и снижают ток. А высоковольтный преобразователь – это совсем другой класс задачи. Нельзя просто так взять силовые ключи на 10кВ и сделать из них классический инвертор на 6 ключей, как раньше: и нет таких ключей, а если есть, они очень дороги. Инвертор делают многоуровневым, на низковольтных ключах, соединенных последовательно в сложных комбинациях. Такой инвертор иногда тянет за собой специализированный трансформатор, оптические каналы управления ключами, сложную распределенную систему управления, работающую как одно целое… В общем, сложно всё у мощного асинхронного привода. При этом вентильно-индукторный привод за счет секционирования может «отсрочить» переход на высоковольтный инвертор, позволяя сделать привода до единиц мегаватт от низковольтного питания, выполненные по классической схеме. В этом плане ВИПы становятся интереснее асинхронного привода, да еще и обеспечивают резервирование. С другой стороны, асинхронные привода работают уже сотни лет, двигатели доказали свою надежность. ВИПы же только пробивают себе дорогу. Так что здесь надо взвесить много факторов, чтобы выбрать для конкретной задачи наиболее оптимальный привод.
Но всё становится еще интереснее, когда речь заходит о транспорте или о малогабаритных устройствах. Там уже нельзя беспечно относиться к массе и габаритам электропривода. И вот там уже нужно смотреть на синхронные машины с постоянными магнитами. Если посмотреть только на параметр мощности деленной на массу (или размер), то синхронные машины с постоянными магнитами вне конкуренции. Отдельные экземпляры могут быть в разы меньше и легче, чем любой другой «безмагнитный» привод переменного тока. Но здесь есть одно опасное заблуждение, которое я сейчас постараюсь развеять.
Если синхронная машина в три раза меньше и легче – это не значит, что для электротяги она подходит лучше. Всё дело в отсутствии регулировки потока постоянных магнитов. Поток магнитов определяет ЭДС машины. На определенной частоте вращения ЭДС машины достигает напряжения питания инвертора и дальнейшее повышение частоты вращения становится затруднительно. Тоже самое касается и повышения момента. Если нужно реализовать больший момент, в синхронной машине нужно повышать ток статора – момент возрастет пропорционально. Но более эффективно было бы повысить и поток возбуждения – тогда и магнитное насыщение железа было бы более гармоничным, а потери были бы ниже. Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):

На рисунке по горизонтальной оси отложен момент двигателя, по вертикальной – частота вращения. Звездочкой отмечена точка номинального режима, например, пусть это будет 60кВт. Заштрихованный прямоугольник – это диапазон, где возможно регулирование синхронной машины без проблем – т.е. «вниз» по моменту и «вниз» по частоте от номинала. Красной линией отмечено, что можно выжать из синхронной машины сверх номинала – небольшое повышение частоты вращения за счет так называемого ослабления поля (на самом деле это создание лишнего реактивного тока по оси d двигателя в векторном управлении), а также показана некоторая возможная форсировка по моменту, чтобы было безопасно для магнитов. Всё. А теперь давайте поставим эту машину в легковое транспортное средство без коробки передач, где батарея рассчитана на отдачу 60кВт. Желаемая тяговая характеристика изображена синим. Т.е. начиная с самой низкой скорости, скажем, с 10км/ч привод должен развивать свои 60кВт и продолжать их развивать вплоть до максимальной скорости, скажем 150км/ч. Синхронная машина и близко не лежала: её момента не хватит даже чтобы заехать на бордюр у подъезда (или на поребрик у парадной, для полит. корректности), а разогнаться машина сможет лишь до 50-60км/ч.
Что же это значит? Синхронная машина не подходит для электротяги без коробки передач? Подходит, конечно же, просто надо по-другому её выбрать. Вот так:
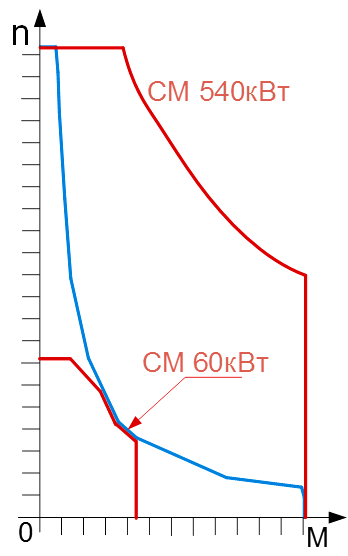
Надо выбрать такую синхронную машину, чтобы требуемый тяговый диапазон регулирования был весь внутри её механической характеристики. Т.е. чтобы машина одновременно могла развить и большой момент, и работать на большой частоте вращения. Как вы видите из рисунка… установленная мощность такой машины будет уже не 60кВт, а 540кВт (можно посчитать по делениям). Т.е. в электромобиль с батареей на 60кВт придется установить синхронную машину и инвертор на 540кВт, просто чтобы «пройти» по требуемому моменту и частоте вращения.
Конечно же, так как описано, никто не делает. Никто не ставит машину на 540кВт вместо 60кВт. Синхронную машину модернизируют, пытаясь «размазать» её механическую характеристику из оптимума в одной точке вверх по скорости и вниз по моменту. Например, прячут магниты в железо ротора (делают инкорпорированными), это позволяет не бояться размагнитить магниты и ослаблять поле смелее, а также перегружать по току побольше. Но от таких модификаций синхронная машина набирает вес, габариты и становится уже не такой легкой и красивой, какой она была раньше. Появляются новые проблемы, такие как «что делать, если в режиме ослабления поля инвертор отключился». ЭДС машины может «накачать» звено постоянного тока инвертора и выжечь всё. Или что делать, если инвертор на ходу пробился — синхронная машина замкнется и может токами короткого замыкания убить и себя, и водителя, и всю оставшуюся живой электронику — нужны схемы защиты и т.п.
Поэтому синхронная машина хороша там, где большого диапазона регулирования не требуется. Например, в сегвее, где скорость с точки зрения безопасности может быть ограничена на 30км/ч (или сколько там у него?). А еще синхронная машина идеальна для вентиляторов: у вентилятора сравнительно мало изменяется частота вращения, от силы раза в два – больше особо нет смысла, так как воздушный поток ослабевает пропорционально квадрату скорости (примерно). Поэтому для небольших пропеллеров и вентиляторов синхронная машина – это то, что нужно. И как раз она туда, собственно, успешно ставится.
Тяговую кривую, изображенную на рисунке синим цветом, испокон веков реализуют двигатели постоянного тока с регулируемым возбуждением: когда ток обмотки возбуждения изменяют в зависимости от тока статора и частоты вращения. При увеличении частоты вращения уменьшается и ток возбуждения, позволяя машине разгоняться выше и выше. Поэтому ДПТ с независимым (или смешанным) управлением возбуждением классически стоял и до сих пор стоит в большинстве тяговых применений (метро, трамваи и т.п.). Какая же электрическая машина переменного тока может с ним поспорить?
К такой характеристике (постоянства мощности) могут лучше приблизиться двигатели, у которых регулируется возбуждение. Это асинхронный двигатель и оба типа ВИПов. Но у асинхронного двигателя есть две проблемы: во-первых, его естественная механическая характеристика – это не кривая постоянства мощности. Потому что возбуждение асинхронного двигателя осуществляется через статор. А поэтому в зоне ослабления поля при постоянстве напряжения (когда на инверторе оно закончилось) подъем частоты в два раза приводит к падению тока возбуждения в два раза и моментоообразующего тока тоже в два раза. А так как момент на двигателе – это произведение тока на поток, то момент падает в 4 раза, а мощность, соответственно, в два. Вторая проблема – это потери в роторе при перегрузке с большим моментом. В асинхронном двигателе половина потерь выделяется в роторе, половина в статоре. Для уменьшения массогабаритных показателей на транспорте часто применяется жидкостное охлаждение. Но водяная рубашка эффективно охладит лишь статор, за счет явления теплопроводности. От вращающегося ротора тепло отвести значительно сложнее – путь отвода тепла через «теплопроводность» отрезан, ротор не касается статора (подшипники не в счет). Остается воздушное охлаждение путем перемешивая воздуха внутри пространства двигателя или излучение тепла ротором. Поэтому ротор асинхронного двигателя получается своеобразным «термосом» — единожды перегрузив его (сделав динамичный разгон на машине), требуется долгое время ждать остывания ротора. А ведь его температуру еще и не измерить… приходится только предсказывать по модели.
Здесь нужно отметить, как мастерски обе проблемы асинхронного двигателя обошли в Тесла в своей Model S. Проблему с отводом тепла из ротора они решили… заведя во вращающийся ротор жидкость (у них есть соответствующий патент, где вал ротора полый и он омывается внутри жидкостью, но достоверно я не знаю, применяют ли они это). А вторую проблему с резким уменьшением момента при ослаблении поля… они не решали. Они поставили двигатель с тяговой характеристикой, почти как у меня нарисована для «избыточного» синхронного двигателя на рисунке выше, только у них не 540кВт, а 300кВт. Зона ослабления поля в тесле очень маленькая, где-то два крата. Т.е. они поставили «избыточный» для легкового автомобиля двигатель, сделав вместо бюджетного седана по сути спорт-кар с огромной мощностью. Недостаток асинхронного двигателя обратили в достоинство. Но если бы они попытались сделать менее «производительный» седан, мощностью 100кВт или меньше, то асинхронный двигатель, скорее всего, был бы точно таким же (на 300кВт), просто его искусственно задушили электроникой бы под возможности батареи.
А теперь ВИПы. Что могут они? Какая тяговая характеристика у них? Про ВИД СВ я точно сказать не могу – это по своему принципу работы нелинейный двигатель, и от проекта к проекту его механическая характеристика может сильно меняться. Но в целом он скорее всего лучше асинхронного двигателя в плане приближения к желаемой тяговой характеристике с постоянством мощности. А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
Так что же? ВИД НВ – идеальная машина для тяги без единой проблемы? На самом деле нет. Проблем у него тоже куча. Например, его обмотка возбуждения, которая «висит» между пакетами статора. Хоть она и не вращается, от неё тоже сложно отводить тепло – получается ситуация почти как ротором асинхронника, лишь немного получше. Можно, в случае надобности, «кинуть» трубку охлаждения со статора. Вторая проблема – это завышенные массогабаритные показатели. Глядя на рисунок ротора ВИД НВ, можно видеть, что пространство внутри двигателя используется не очень эффективно – «работают» только начало и конец ротора, а середина занята обмоткой возбуждения. В асинхронном двигателе, например, вся длина ротора, всё железо «работает». Сложность сборки – засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь (ротор делается разборным, соответственно, есть проблемы с балансировкой). Ну и просто массогабаритные характеристики пока получаются не очень-то выдающимися по сравнению с теми же асинхронными двигателями Тесла, если накладывать тяговые характеристики друг на друга.
А также есть еще общая проблема обоих типов ВИД. Их ротор – пароходное колесо. И на высоких частотах вращения (а высокая частота нужна, так высокочастотные машины при той же мощности меньше тихоходных) потери от перемешивания воздуха внутри становятся очень значительными. Если до 5000-7000 об/мин ВИД еще можно сделать, то на 20000 об/мин это получится большой миксер. А вот асинхронный двигатель на такие частоты и гораздо выше сделать вполне можно за счет гладкого статора.
Так что же лучше всего в итоге для электротяги? Какой двигатель самый лучший?
Понятия не имею. Все плохие. Надо изобретать дальше. Но мораль статьи такова – если вы хотите сравнить между собой разные типы регулируемого электропривода, то нужно сравнивать на конкретной задаче с конкретной требуемой механической характеристикой по всем-всем параметрам, а не просто по мощности. Также в этой статье не рассмотрены еще куча нюансов сравнения. Например, такой параметр как длительность работы в каждой из точек механической характеристики. На максимальном моменте обычно ни одна машина не может работать долго – это режим перегрузки, а на максимальной скорости очень плохо себя чувствуют синхронные машины с магнитами – там у них огромные потери в стали. А еще интересный параметр для электротяги – потери при движении выбегом, когда водитель отпустил газ. Если ВИПы и асинхронные двигатели будут крутиться как болванки, то у синхронной машины с постоянными магнитами останутся почти номинальные потери в стали из-за магнитов. И так далее, и так далее…
Поэтому нельзя вот так просто взять и выбрать лучший электропривод.
UPD:
Обобщая замечания в комментариях, необходимо дополнить некоторые важные, как оказалось, вещи, которые я изначально опустил как маловажные.
1. Асинхронные двигатели до эры преобразователей частоты регулировали за счет применения так называемого фазного ротора — когда ротор делался в виде обмотки, а не беличьей клетки, а через контактные кольца (как у синхронной машины) фазы ротора выводились наружу. Включая в цепь ротора резисторы можно было мягко пускать АД и безопасно регулировать частоту вращения, изменяя сопротивление. Проблема в том, что очень много энергии при этом терялось в резисторах — иногда до половины от подводимой к приводу мощности.
2. В статье не упомянуты синхронные реактивные машины и их совмещение с синхронными машинами с постоянными магнитами. Если сделать ротор синхронной машины с магнитами явнополюсным — например таким, как нарисован ротор SRD двигателя на gif анимации, то развиваемый момент может быть не только активным, но и реактивным — как у SRD. Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
3. Шаговые двигатели не рассмотрены, потому что по принципу действия они в первом приближении схожи либо с синхронными машинами с постоянными магнитами, либо с SRD двигателями — зависит от конкретного типа шаговика. Только шаговые двигатели, в отличие от «силовых» приводов, имеют гораздо большее количество пар полюсов (зубцов) для увеличения коэффициента электрической редукции: чтобы одному периоду тока соответствовало меньшее угловое перемещение вала. Управление шаговиками обычно тривиальное — последовательный перебор фаз друг за другом (шаги). Более продвинутые системы дробят шаг, подавая в двигатель «микрошаги» — по сути приближая управление к синусоидальному. Еще более продвинутые используют датчик положения ротора и применяют полноценное векторное управление. Но в таком случае и машину нужно делать более качественную, а называться в сумме это будет уже настоящим сервоприводом.
Комментарии (146)

ansector13
08.02.2016 18:42Для приводов больших мельниц, шахтных вентиляторов, подъемно-транспортного оборудования и еще много чего используют асинхронный двигатель с фазным ротором. Его основное преимущество в простой регулировке скорости\момента — введением сопротивления в роторную обмотку.

BelerafonL
08.02.2016 18:54Да, есть такой старый добрый способ регулирования. Я уж не стал его рассматривать. Есть еще двухскоростные АД, в лифты часто ставят.

DenverElrond
08.02.2016 18:57+1Спасибо за статью! Можно еще вспомнить и об экзотике: линейные двигатели, дугостаторные двигатели, двигатели с катящимся ротором.
BelerafonL
08.02.2016 19:01+4Да, а еще пьезодвигатели, электростатические, двигатель Фарадея, асинхронные для перекачки магнитной жидкости и еще много, много всего!
gert
08.02.2016 19:54+1Их ротор – пароходное колесо
А если пространство между зубьев заполнить магнито-инертным легким и прочным материалом? Или на таких оборотах материал начнет отрываться от ротора?BelerafonL
08.02.2016 19:58+1Конечно можно заполнить. И иногда так и делают. И, конечно, будут проблемы на высокой частоте вращения с механической прочностью конструкции. Так или иначе, от простоты, технологичности и дешевизны ротора ВИП здесь уже мало что останется.

Bedal
09.02.2016 11:29По аналогии с лопатками турбин/компрессоров в турбореактивных движках можно сделать «спиливаемый» заполнитель, который поначалу касается статора. Потом притирка — и поехали. Кроме устранения воздушных потерь, будет ещё и предохранение от вибраций при небалансе.
Вряд ли всё так просто — но звучит красиво :-)

impetus
08.02.2016 21:16+2Шикарная статья!
Ну, в общем да — «электропривод» — отдельные наука и отрасль по сути.
И — «запасные/резервные» — если бы нефти на планете бы не оказалось вообще — вполне бы хватило электричества для развития цивилизации практически в нынешнем виде… разве что с авиацией попозже бы вышло…
Что прикольно — асинхронник с КЗ ротором изобретён Доливо-Добровольским в 1889году в Берлине, а Дизель создал «дизеля» в 1897 в Аугсбурге… От нас сейчас это события практически в одной точке пространства-времени.Edmond
09.02.2016 00:17+3Без нефти весь мир вокруг нас выглядел бы по-другому. Это ведь не только топливо. Столько всего вокруг делается из нефтепродуктов.

wormball
08.02.2016 21:37+1По правде говоря, ВИД НВ не очень понятно нарисован. С ротором всё понятно, а как выглядят катушки/сердечники у статора? Я так понял, что они должны идти от «переднего» конца к «заднему».
> засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь
Ежели я правильно понял (см. выше), то напрашивается два пути решения оной проблемы. Во-первых, можно «задний» конец сделать вовсе без выпуклостей, чтобы он чисто служил магнитопроводом. А во-вторых, можно ротор сделать в виде диска, «передний» конец будет «большим», задний — маленьким, между ними канавка, в которой обмотка возбуждения, а статор «сзади». Помнится, где-то я подобное видел на electrotransport.ru, только забыл, как называется, и это был не ВИД, а «обычный» двигатель.
> Их ротор – пароходное колесо
А что мешает все пустоты чем-то заполнить?BelerafonL
08.02.2016 22:02Статор такой же, как на синхронной или асинхронной машине. Да, обмотка идет от переднего конца к заднему, по всей длине. Первые версии этого типа машин и генераторов как раз и были «односторонними», например вот такими. У них со сборкой, действительно, проблем нет. Но и использование габаритов машины при этом не очень рациональное. Вместо того, чтобы получить удвоение момента, используя обе стороны ротора, оба воздушных зазора, где поток возбуждения переходит в статор, они получают момент лишь с одной стороны. Кроме того, в такой схеме магнитный поток частично идет через подшипник, от чего он не очень хорошо себя со временем начинает чувствовать. Проблему одевания обмотки возбуждения (ОВ) решают проще — поднимают её выше зубзов ротора — на статор. Вот как в этой диссертации на рисунке 1. Ведь ротор остается точно также охвачен контуром ОВ — именно так сделано, например, в приведенном проекте мощных ВИП для теплостанций. Только радиус витка обмотки при этом увеличивается, а соответственно и потери в ОВ. И машина становится немного более габаритной. Конструкции так и различают — ВИД НВ с «поднятой» ОВ и с «опущенной» ОВ (как на рисунке в статье). Опущенная ОВ дает более высокую компактность машины ценой неудобства сборки — но для тяговых приводов на это приходится идти.
Что касается заполнения пустот, то, как я отвечал в комментарии выше, заполнить их, конечно же, можно. Только будут проблемы с механической прочностью на высоких частотах вращения, балансировкой этого «заполнителя», повысится цена изделия и т.п.

kotomyava
08.02.2016 21:40+1А почему бы не сделать в ВИД заглушки на роторе, например, пустотелые, чтобы его ротор стал круглой болванкой? =) Вот и не будет «пароходного колеса» — одной проблемой меньше. Какой-нибудь стекло/угле/кевларо-пластик, например будет и достаточно лёгким и достаточно прочным и достаточно тонким, чтобы не увеличивать сильно зазор между ротором и статором.
Также, обмотку подмагничивания ВИД НВ можно очень просто охлаждать — надо сделать её из медной трубки, как делают индукторы для индукционного нагрева, и пропускать через неё жидкость. Минус ещё одна проблема.
С балансировкой тоже не должно быть проблем, если собирать пакеты ротора на валу со шлицами, например. Т.е. динамически балансировать снаружи в том же положении половинок на нём же.
Ну и да, а что лучше для небольших электрических транспортных средств, типа тех же велосипедов?
Насколько сложен алгоритм управления ВИД НВ относительно асинхронного или синхронного двигателя на постоянных магнитах?
И какой из перечисленных в статье двигателей наиболее энерго эффективен?
Последний вопрос, кстати, наиболее важен, пока ёмкость аккумуляторов является наиболее слабым местом электротранспорта. Может коробка передач с механическими потерями, в итоге меньшее зло? =)BelerafonL
08.02.2016 22:30+1Про заглушки на роторе я ответил в комментрациях выше, посмотрите, пожалуйста.
Обмотку возбуждения нельзя выполнить "медной трубкой" — там нужно много витков для получения большого потока и небольших потерь. А вот пропустить небольшую трубочку охлаждения можно.
Про балансировку: не поверите, шлицы есть, не помогает :) На заводе… балансируют роторы, разбирают, привозят на сборку машин, а там рабочие потом иногда перепутывают от какого ротора начало, от какого конец. Нужно делать ставку на то, где машины собирают. Две запчасти — это уже не шутки! :)
А если серьезно, то шлиц может допускать небольшие допуски при соединении, а при балансировке это очень может сильно влиять на конечный результат.
Для велосипедов, наверное, лучше синхронная машина с магнитами пока что. Там диапазон регулирования не очень велик — 150км/ч там ехать не надо (надеюсь), а также на бордюры с места заезжать не надо — если что, «водитель» ногами поможет.
Алгоритм управления ВИД НВ ничем не отличается от управления обычной синхронной машиной, как и сказано в статье. Вы даже не отличите, что это не синхронная машина, если будете управлять. Тоже самое векторное управление в классическом варианте (датчиковое, бездатчиковое) или автокоммутация. Дополните только его управлением контуром возбуждения, сделав ослабление поля, там где надо.
Про энергоэффективность в статье сказано в выводе — надо брать конкретную задачу, диаграмму нагрузки и считать для каждого типа двигателя, чтобы узнать результат — какой подходит лучше. Нет «лучшего во всех планах» электродвигателя.
На машинах Formula E стоит пятиступенчатая коробка передач и синхронный электродвигатель. Как по мне — с коробкой передач для электродвигателя становится всё гораздо проще и легче. На элекромомобилях я бы лично делал две передачи — обычную и «пониженную». На обычной можно кататься «каждый день», а пониженную использовать для въезда в гору из подземной парковки, заезда на бордюр и так далее. Это было бы для бюджетного электромобиля, наверное, пока оптимально. Только неправильно говорить, что в механической коробке передач — потери. Они там есть, но и точно также есть и в обычном редукторе. А редуктор, какой-никакой, всё равно на электромобиль ставить надо. И потери в нем будут. Вопрос только — одноступенчатый или переключаемый.beavole
08.02.2016 23:46+2Может, вместо заглушек между зубьями надевать на ротор тонкостенную пластиковую трубу с крышками с торцов?
Имхо — просто, прочно, разбирать легко.BelerafonL
09.02.2016 00:01+5Никак нет. Самый главный параметр любого электродвигателя, за который борются его конструкторы — это величина воздушного зазора между железом статора и ротора. Чем он больше, тем хуже получается электродвигатель в электрическом плане — увеличивается магнитное сопротивление, что требует большего тока для создания того же магнитного потока. Если же уменьшать воздушный зазор, то это уже вызывает проблемы с механической стороны — зазор может получиться неравномерным, из-за чего параметры двигателя на обороте будут меняться. Еще хуже — задевание ротора за статор. В электродвигателях средней мощности воздушный зазор составляет, например, 1мм. Если вы поставите еще пластиковую трубу толщиной 1мм, то зазор между ротором и статором увеличится в два раза, что очень сильно ухудшит характеристики двигателя.
beavole
09.02.2016 00:58+2Спасибо за ответ (и за интересную статью!). Я подозревал, что величина зазора между ротором и статором очень важна (поэтому и написал, что тонкостенной трубой), просто надеялся, что есть окно параметров, при которых полезный эффект от устранения «воздушного миксера» преобладает над вредными эффектами от увеличения зазора/усложнения конструкции.
Вот и предложил, на мой взгляд, самое простое решение в лоб — не прокатило.
kotomyava
08.02.2016 23:561. А чем плоха прочность композитной оболочки? Внутри двигателя на сдавливание-то нагрузок нет больших, а разорвать её не разорвёт — прочность на разрыв высока, и вес мал. Ну в конечном итоге можно сделать и ячеистую структуру/ферму внутри.
2. Ну ключ в конце концов можно сделать. =) А допуски да, есть, но тут тоже больше к культуре и качеству производства, на самом деле вопрос…
4. Т.е. добавляется только уменьшение тока подмагничивания при достижении определённой скорости, и возможно, увеличение на старте, никаких больших хитростей нет?
5. Ну это всё же дополнительные потери, как никак — чем больше пар шестерней и вращающихся масс, тем больше. Редуктор-то и с коробкой понадобится и без, да и дифференциал, если не использовать мотор-колёса.
P.S. И спасибо за интересные статьи!BelerafonL
09.02.2016 00:151. Ну наверное, наверное можно разработать приемлемое покрытие для ротора. Я не спорю. Просто этот вопрос нужно решать, а в асинхроннике и неявнополюсной синхронной машине он решен сам собой. Лишь это я хотел подчеркнуть.
4. Хитростей никаких. Примерно так и надо, да. Для улучшения КПД можно ещё попробовать поиграть соотношением тока статора/возбуждения в интересующих точках, чтобы найти оптимум и заложить результаты в таблицу в привод, по которым он будет регулировать.
5. Потери там не сильно больше, а вот механизм переключения делать, синхронизатор (чтобы на ходу переключать), датчик частоты вращения до и после редуктора, чтобы тяговым двигателем переключать на ходу и «попадать» в нужную частоту вращения, концевые выключатели, чтобы знать, когда передача включилась… Это да, это всё усложняет дело с коробкой передач по сравнению с обычным редуктором.

telobezumnoe
09.02.2016 08:44в идеале вариатор и общую систему управления, двигатель вообще может работать при оптимальных оборотах, а изменяя момент
двигателя и в то же время передаточное число вариатора обеспечивать оптимальную динамику. еще важно помимо динамических характеристик двигателя, возможность использования в генераторном режиме и рекуперации энергии торможенияBelerafonL
09.02.2016 08:50Для самого электродвигателя — да, вариатор это было бы очень хорошо. Но это было бы слишком «щедрым» для него подарком. Уж не такой электродвигатель и беспомощный, чтобы совсем уж не менять частоты вращения и момента. А вариатор — иногда довольно большая и капризная штука и не всегда с хорошим КПД.


dimatl
08.02.2016 22:36Подскажите, как я понимаю асинхронные двигатели такого принципа на автомобиле не возможны и подобные видео просто фейк? youtu.be/kObWDnmFCvM
BelerafonL
08.02.2016 23:03+4Почему же? Какого «такого» типа? Асинхронник как асинхронник. Вполне себе годен как альтернативный вариант для мотор-колеса велосипеда вместо синхронной машины. Работать будет вполне себе. Вы посмотрите, какой он здоровый — неудивительно, что у него с таким радиусом будет большой момент на низах. Но самое главное-то — это тяговая характеристика. Не мощность, не момент, а именно кривая зависимости момента от скорости в полном диапазоне с указанием, где двигатель может работать длительно, а где кратковременно (и сколько). А лучше две характеристики — длительную (проходящую по теплу) и предельную кратковременную. Вот тогда можно было бы сравнивать. А в самом видео движущегося электровелосипеда на асинхроннике ничего удивительного нет.
Что же касается обмотки «славянка» — то это, скорее всего, маркетинговый ход. С такой обмоткой есть в интернете еще немало видео, которые уже смахивают на фейк. С такой обмоткой якобы «серийно» перематываются обычные промышленные асинхронники и якобы с такой обмоткой они становятся чем-то там лучше. Но когда дело доходит до предоставления конкретных характеристик конкретного асинхронника — перемотанного и не перемотанного, то оказывается, что или таких характеристик на сайте «перемотчика» нет, или они совпадают почти полностью с неперемотанным оригиналом (КПД, критический момент, номинальный ток, косинус фи и т.п.). Мы на фирме хотели было как-то приобрести асинхронник со «славянкой» и точно такой же оригинальный не перемотанный, установить в нашу лабораторию с датчиком момента и прокрутить, сделав эксперимент на тепло, измерение КПД и на снятие механической и элекромеханической характеристик. Но что-то нам его не продали на эти цели… Если кто-то готов предоставить двигатель со «славянкой» на такой эксперимент — мы бы испытали ради всеобщего интереса с публикацией результатов.

spiritus_sancti
08.02.2016 23:02Пользуясь случаем задам вопрос в тему электродвигателей. Есть лабораторная центрифуга 60х годов. Она имеет переключатель скорости и может разгоняться до 9 тыс об/ мин. В то же время асинхронная машина быстрее 3000 об/мин в сети 50 Гц вращаться не сможет. Вопрос — какой двигатель в центрифуге? шума коллектора нет, ротор вращается очень легко, как у асинхронной машины. Выбег ротора такой что коллектора наверное там нет — трение щеток не дало бы так долго вращаться. Какая либо умная начинка отметается — центрифуга старая. Какой двигатель может дать 9000 об/мин в сети 50 Гц?
BelerafonL
08.02.2016 23:11Судя по раскопкам на форуме медиков, которые работают с такими центрифугами, при неисправности первым делом они советуют проверять и менять щетки. А это значит, что там просто качественный коллекторный двигатель. Щетки бывают очень неплохо сделаны. Двигатель там маломощный, а если у центрифуги приличный момент инерции, то вращаться будет очень-очень долго.
VladSK
08.02.2016 23:28Спасибо за статью!
Коль скоро здесь специалисты наверное есть, хочу спросить: где можно качественно порезать электротехническую сталь, желательно в Москве? От обычной лазерной резки остается существенный гарт по краям и сталь потом плотно не упаковывается. На работе экспериментирую с изготовлением BLDC, хочу сделать небольшую машину на несколько киловатт со сверхпроводниковыми обмотками, но обрабатывать сталь напильником уже надоело.hemool
08.02.2016 23:45Да обработка не проблема! давайте я вам надфилем настругаю магнитопровод, в обмен на ~60-80 сверхпроводящего провода?
Мне много не надо, 0.5 мм2…
Причина редактирования — очепяткаDenverElrond
09.02.2016 02:31тогда уж и обжечь то что получится не забудьте! Иначе теряются магнитные свойства после мех.обработки.

darkfrei
09.02.2016 00:29А как работают трёхфазные, но двухполюсные двигатели?
BelerafonL
09.02.2016 01:05Да также, как и любые многополюсные. Просто на одном механическом обороте сменяется несколько «электрических» оборотов: напряжение и ток успевают несколько раз поменять свой знак, пока проедут один механический оборот. Посмотрите, например, рисунок 2.6 по этой ссылке или посмотрите на гифку в википедии — там четырехполюсный двигатель.
darkfrei
09.02.2016 01:13Во всех справочниках приводится подключение двигателей с четырьмя полюсами и более, даже в вики. Но как запихнуть три синусоиды переменного тока в два полюса асинхронного двигателя?
BelerafonL
09.02.2016 10:41+1Количество фаз двигателя вообще никак не связано с количеством пар его полюсов. Это разные параметры, каждый из которых сам по себе. Можно сделать десятифазный двигатель с одной парой полюсов, а можно двухфазный с сотней пар полюсов. Количество пар полюсов — это то, сколько раз на окружности статора повторены все фазы двигателя. ABC,ABC,ABC,ABC — четыре пары полюсов и три фазы, как на википедии в анимации (там фазы разного цвета). Если просто «ABC» по всей окружности под 120 градусов между фазами — одна пара полюсов. Вы запихиваете фазы в полюса, а надо умножать эти значения, чтобы представить, на что похож статор.
f1ac
09.02.2016 00:59Как я понимаю, у коллекторных двигателей есть большой недостаток, — шум. Особенно раздражает высокочастотная составляющая. Как-то заинтересовался, существуют ли пылесосы и прочие шумные бытовые приборы с бесколлекторными двигателями, и ничего не нашёл. Неужели перспектива заявить «Наш пылесос на 40дБ* тише обычного** пылесоса» никого не заинтересовала? Или недостатки бесколлекторных двигателей в этом случае слишком велики?
BelerafonL
09.02.2016 01:17+1Там еще надо разбираться в каждом отдельном случае, что шумит — двигатель, его вентилятор охлаждения, редуктор (в дрели, болгарке) или еще что-то. А бесколлекторные двигатели небольшой мощности не так и просто запитать от сети. Там все дело в преобразователе. Одно дело был бы это аккумулятор на 12В — там все понятно, полевые транзисторы и поехали. А когда здесь сеть на 220В… то уже всё сложно, или понижать надо, или ключи ставить на 311В звена постоянного тока, конденсаторы, микроконтроллер, а это уже недешевая такая штука в сумме и немаленькая по размеру получается.
impetus
09.02.2016 14:39+1В пылесосе почти весь шум — аэродинамический. Даже просто замена шланга — гофры на гладкий — его наблюдаемо понижает. Но неудобно. Мотор отдельно шумит конечно, но надев на вал импеллер сразу понимашь разницу
soniq
09.02.2016 02:10+2Мне ВИД показался похожим на пачку двигателей на одном валу. Почему бы не собрать пяток асинхронных 300 кВт машин с контроллерами — это уже полтора мегаватта дешевой управляемой мощности?
BelerafonL
09.02.2016 09:22В ВИД наращивание мощности может идти не вдоль, а по радиусу. По радиусу добавляются новые фазы, новые триады, не связанные электрически и магнитно друг с другом. В асинхронном двигателе если вы на статор намотаете еще обмотку, она будет иметь «трансформаторную» связь с другими обмотками через ротор, из-за чего будет очень сложно синхронизировать системы управления разных контроллеров друг с другом — это должен быть один контроллер и один преобразователь. Асинхронный двигатель можно «набрать» из полностью независимых частей только вдоль, получив сосику длиной во весь цех. А у ВИПов мощность можно наращивать и в длину и в ширину, сохраняя машину пропорциональной. Например, как это делается для ВИД НВ показано на первых слайдах этой презентации.


monah_tuk
09.02.2016 05:13+1Эх, ваши бы статьи да 12 лет назад, как раз к курсу Электрических машин бы к месту были. А так, спасибо — очень интересное чтиво.

Darth_Biomech
09.02.2016 07:46+1Очень интересная статья, спасибо.
Скажите, а будет продолжение про управляемые моторы — типа шаговых и сервоприводов?BelerafonL
09.02.2016 08:53А что именно вы бы хотели узнать? Про синхронные двигатели и векторное управление для них уже была статья, до «сервоприводов» оттуда рукой подать — ставите регулятор положения и готово.
ansector13
09.02.2016 09:08Тоже занимаюсь электроприводом, в основном короткозамкнутые асинхронные и асинхронные с фазным ротором, всё это для подъемно-транспортного оборудования.
Хотелось бы увидеть статью обзор, глобальный такой «по верхам» где какие типы и мощности применяются. С удовольствием добавлю в комментариях то, что знаю в своей сфере.BelerafonL
09.02.2016 09:33Обзор электродвигателей именно в сфере подъемно-транспортного оборудования? Думаю, это получится очень специфическая тема для общеобразовательной статьи. Кроме того, честно признаюсь, я в такой узкой области даже не знаю, что написать — это как раз Вы могли бы сделать такую статью, раз работаете в этой области. Я больше по насосам, да немного по электротяге.
ansector13
09.02.2016 10:56Нет, просто обзор всех типов по применению, эту информацию очень сложно найти просто так, каждый знает в своей сфере.
Про статью от меня — я обязательно подумаю.
wormball
09.02.2016 11:34+2Кстати, об бытовой технике. Вот здесь люди заменяют мотор в шуруповёрте на авиамодельный синхронный и авиамодельный же регулятор. http://roboforum.ru/forum61/topic12163-30.html#p282229 Вроде как по всем характеристикам выигрывает, ещё и защита от дурака появляется (на коллекторнике что-либо спалить — как два пальца об асфальт), а по деньгам получается чуть ли не дешевле, нежели новый родной мотор. Что вы на эту тему думаете? Нет ли здесь подводных камней?
BelerafonL
09.02.2016 12:26Есть подводные камни. Там ставят бесколлекторный моторчик, рассчитанный на обильное воздушное охлаждение (от пропеллера авиамоделек), но ставят в закрытый корпус. Посмотрите — коллекторник на фото больше как раз на размер воздушной крыльчатки — не просто так она там стоит. Поэтому житься такому синхронному моторчику внутри шуруповерта будет очень нелегко — может перегреться.
И самое главное — туда люди ставят регулятор с бездатчиковым управлением. Что для шуруповерта неприемлемо. Он будет крутиться хорошо, пока крутится. Но если его остановить — момент при трогании под нагрузкой у него будет никакой, шуруповерт будет дергаться во все стороны, момент будет пульсировать и менять знак. Т.е. при закручивании, собственно, шурупов всё будет очень неудобно. Сверлить еще сойдет.
Туда нужен бесколлекторник с датчиками Холла. И соответствующий регулятор. Не от авиамодели, а от автомодели, в общем. Тогда будет годно.
machestro
09.02.2016 12:35Меня интересует чисто гипотетическая задача. Прямого ответа так и не нашёл. Поэтому, пользуюсь случаем, хочу спросить у профессионала. Допустим у нас машина переменного тока (пускай 2-х фазная). Есть датчик положения, который выдаёт синус с косинусом. Усиливаем сигналы с ДПР и питаем машину в зависимости от положения ротора — то есть, если можно так назвать «идеальная автокоммутация». Теперь если управлять напряжение на звене постоянного тока, как это делается для систем подчинённого регулирования для ДПТ, получим ли мы в этом случае аналог ДПТ, но без коллектора? Будут ли рабочие характеристики при таком способе управления отличаться от векторного, при условии, что мы работаем в «1ой зоне» регулирования?
Я понимаю, что такой вариант менее эффективен, если вообще возможен. Мне интересно чисто с точки зрения теории.
И более общий вопрос — можно ли ДПТ использовать для задач «удержания»?BelerafonL
09.02.2016 12:471. Если я правильно понял суть того, как вы хотите сделать, то это получится некий непрерывный, аналоговый вариант «автокоммутации». Работать будет, но тут надо не абы какую машину переменного тока, а именно синхронную. Асинхронник так не поедет. Проблема тут в том, что вы подадите на двигатель именно напряжение в соответствии с датчиком положения, а не ток. В векторном управлении по оси двигателя q должен быть именно ток. Если вы подаете напряжение прямо по сигналу с датчика, без всякой обработки, то на небольших частотах вращения фаза напряжения и тока будет почти совпадать. По мере разгона ток будет все сильнее отставать от напряжения, ток будет всё более реактивным и бесполезным. Поэтому в обычной автокоммутации применяют опережение коммутации — время, насколько раньше надо на данной частоте вращения подавать на двигатель напряжение, чтобы ток в итоге получился вдоль оси момента q. У вас же получится вариант, как рассмотрен в статье с синхронной машиной на рисунке 4.
2. ДПТ совершенно прекрасно используется в сервоприводах с датчиком положения ротора. Вы делаете контур тока (по датчику тока), и контур скорости, положения (по энкодеру, например). Задаете регулятору положения нужное задание, где вам там нужно удерживать — и все. В зависимости от быстродействия системы управления и качества датчика положения получаете те или иные характеристики качества удержания. Точно также делается и система на серводвигателе переменного тока, а конечные потребительские свойства получаются примерно такие же, как и на ДПТ (только нет износа коллектора). Если же без датчика положения, то с ДПТ ничего не выйдет.machestro
09.02.2016 13:30Спасибо, теперь стало понятно!
Вспомнил ещё один момент. Всем известно, что в 3х фазной сети синусоиды сдвинуты на 120 эл.градусов. Двигатели также питаются напряжением с таким же сдвигом фаз. Но я пару раз натыкался на статьи где используется сдвиг фаз на 180 градусов, якобы для повышения момента. Меня вот интересует на сколько такой режим питания эффективен и безопасен для движков.
Ссылки на статьи к сожалению не приведу, но есть драйвер для BLDC/SMPM — MTD6501, в его datasheet как раз сказано, что используется 180 гр.
dimasky
09.02.2016 13:51+5Хорошая статья, несмотря на неполноту, добавлю пару уточнений (раз уж я зарегистрировался):
ДПТ делают на очень большие мощности, вплоть до десятков мегаватт — мощные шахтные подъемники все с ДПТ от 630 до 6300 кВт (да, их масса достигает 200 т), привода гребных винтов судов тоже.
АД прекрасно секционируются как по длине, так и по высоте — путем повышения фазности, каждая тройка которых питается от своей секции ПЧ.
Кроме того, как известно, на сегодняшний день наиболее мощные и распространенные (в мире) тяговые привода — с асинхронными двигателями: начиная с той же Тесла, далее трамвай/троллейбус/электробус (180-240 кВт), метро, и заканчивая электровозами (1200-1500 кВт).
Если же говорить о PMSM, то их использование в чистом виде для тяги (ну, может за исключением велосипедов и прочей экзотики типа сегвеев) закончилось в прошлом веке. Уже с 1999 г. Toyota и Honda, а с 2005 г. BMW и другие ведущие производители гибридов и электрокаров внедряют т.н. гибридные синхронные машины, и стремятся снизить вклад магнитов в суммарную тягу, заменяя его реактивной составляющей момента. Это позволяет расширить выходную характеристику 6-8-полюсных машин до 10-12 тыс. оборотов с приемлемыми показателями тяги и потерь.
И очень странно, что Вы не упомянули чистые синхронно-реактивные машины, хотя они были изобретены в 1923 г., и их массовый выпуск (да, от единиц Вт до единиц кВт) был как в СССР, так и в мире, и которые сейчас переживают наибольший расцвет в странах, в которых считают энергоэффективность…
Но в целом очень неплохо…BelerafonL
09.02.2016 14:14+2Спасибо за профессиональный комментарий.
Про ДПТ такой мощности, честно говоря, я не в курсе. В живую не видел, а в некоторых учебниках по приводу пишут про ограничение в единицы мегаватт. Было бы интересно узнать, как там сделан коллектор. Наверное, при желании всё сделать можно, вопрос в целесообразности и надежности.
В АД фазность увеличивать можно, но вы же не будете отрицать, что фазы получаются связанными? И чтобы управлять таким АД, нужно либо синхронизировать трехфазные секции по времени с точностью до процентов периода ШИМ, если синусный фильтр на выходе преобразователя не используется, или с точностью до периода основной гармоники, если синусный фильтр стоит. Переходные процессы в одной секции будут неизбежно влиять на переходные процессы в другой: система управления должна быть централизованной.
Асинхронный привод используется в тяге очень активно, я не спорю. Да и ДПТ все еще по-старинке ставят, да и другие типы двигателей. Вопрос, какое же решение все-таки лучше.
Гибридная синхронная машина — это по сути та же синхронная машина с искусственно увеличенной явнополюсностью. Примерно это я имел ввиду под небрежной фразой «размазывать механическую характеристику» синхронной машины в статье. Вклад от активного момента там снижают, а вклад от реактивного прибавляют, из-за чего машина получает более широкую механическую характеристику. Возможно, это стоило бы написать более подробно, Вы правы.
Но от такой машины недалеко до чисто синхронно-реактивной машины (без магнитов), а от неё до SRD. По-сути, ведь нет особого отличия, как сделан статор — зубцами или гладкий (с точки зрения принципа работы). Я рассмотрел SRD, а реактивную машину и промежуточные варианты с магнитами опустил — это уже достаточно глубокие для общеобразовательной статьи вещи — как именно совместить активный и реактивный момент, чтобы получить оптимум для определенных требований.dimasky
09.02.2016 15:22«Серийно» выпускаются ДПТ серии П2 и П2Ш от 630 до 12500 кВт (это с одним якорем). Я участвовал в наладке 5 электроприводов с такими машинами. К слову: там же, на наладке, был разработан «монитор» для микроконтроллера ADMC и, позже TMS320х, о своей реализации которых Вы писали несколько дней назад. Как без него можно вообще что-то наладить с числом состояний более одного — правда не понятно.
Если говорить о судовых электроприводах — то по фразе «электродвигательный агрегат 100 МВт» гугл даст много интересных статей и картинок ;)
По гибридным машинам — от увеличения числа полюсов PMSM отнюдь не станет PMA-SynRM…
Т.н. «гибридизация» (вообще-то «глупый» маркетинг-термин, введенный в оборот BMW в рекламе своих i3-i8) достигается изменением геометрии магнитов, геометрии «пустот» в роторе, и расположением магнитов в пустотах.BelerafonL
09.02.2016 15:43Поискал. Нашел, например, это.
агрегата, состоящего из четырех двухъякорных электродвигателей постоянного тока такого типа с трехходовыми обмотками, соединенными на валу последовательно, что позволило получить мощность 100 МВт
. Это сосиска из ДПТ, да и еще и двухъякорных. Получается, что предельная мощность ДПТ на один якорь — примерно 10МВт, да и это уже является единичным достижением. Да, возможно, в статье надо исправить единицы мегаватт на десяток, но никак не на десятки и сотни.
PMSM: Не числа же пар полюсов, ну что Вы. Я же не так написал. Увеличение явнополюсности. Явнополюсность — это когда делают явновыраженные полюса, чтобы достичь большего уровня реактивного момента синхронной машины. Вот, какой-нибудь классический учебник — там используется такой термин. Можно это же самое достигать за счет изменения магнитной проводимости ротора более хитрыми способами, но смысл один.dimasky
09.02.2016 15:51Да, Вы правы — я не дочитал про явнополюсность…
Про «сосиску» тоже было весело…
impetus
09.02.2016 14:52Удовлетворите любопытство чайника — какова долговечность электродвигателей?
40 лет непрерывно без остановки, со смазкой подшипников раз пару лет — ходят?
Ресурс дизей примерно представляю — неск тысяч моточасов с регулярным ТО тюненые недогруженные до переборки… А электро? Да хоть тех же эскалаторов/лифтов/насосов водопровода/прокатных станов…
Ну плюс-минус лапоть, навскидку по памяти, не столь мне это важно, что б в справочники вас просить лезть…encyclopedist
09.02.2016 15:08Электровозы (и поезда метро) ходят десятки лет точно. Генераторы элекростанций (которые те же моторы, но наоборот) служат по много десятков лет, приближаясь к сотне.
impetus
09.02.2016 16:38Я совершенно не представляю себе переодичности вывода всего этого на профилактику/ремонт или вообще замену… А то вон с авиадвигателями — вроде сейчас ресурс без снятия у современного движка просто огромен, но пишут — нередки случаи, когда с гарантийного/ регламентного осмотра в сервис-центре — прилетает домой, а там половина деталей новые. С т.з. потребителя/пользователя — да и ладно, даже хорошо, с т.з. объективного технического, а не юридическог знания — получается.просто игра словами… Потому и вопросил.
BelerafonL
09.02.2016 16:52Если двигатель работает в тепличных условиях — без перегрузки, от синусоидального хорошего напряжения, без частых пусков-остановов, а его конструкция отработана годами (это не сырое изделие) — то электродвигатели вечны. Особенно асинхронники. Уже весь корпус будет в коррозии, шильдик зарастет пылью, краска будет сползать клочьями, а он все еще будет работать — на автопилоте, почти без обслуживания. Часто двигатели меняют на новые, снимая и выбрасывая отлично работающие. Просто потому, что они не регулируемые или великоваты/шумноваты и т.п.
Но вот на нефтянке «загоняют» движки гораздо быстрее. Их опускают на глубину, где большая температура, работают они от частотника с ШИМ, который стоит наверху, вглубь скважины идет кабель, на котором из-за большой длины и ШИМ образуется стоячая волна и перенапряжения… Нагрузка всё время разная, еще им 60Гц «подкручивают», чтобы побыстрее и больше качали. В общем, изоляция не выдерживает и они пробиваются лет за 10, а то и быстрее.impetus
09.02.2016 17:01ага, спасибо. примерно так себе это и предствалял, но всё всегда лучше спросить у спеца если они есть в доступности.
Заодно это нам ответ на идею коробки передач — они явно такой надёжностью не обладают.
Наблюдал много раз замену старого движка на новый, гораздо худшего качества из совершенно всевозможных чаще всего бредовейших соображений. Но было всё на уровне ощущений.BelerafonL
09.02.2016 17:10Механические коробки передач тоже почти вечны :) Если хорошие. Там синхронизаторы снашиваются в основном, что в случае электродвигателя может быть компенсировано электронной синхронизацией частот вращения, а также значительно более редким переключением.

Serge78rus
09.02.2016 18:09Кроме подшипников в двигателе без коллектора изнашиваться нечему.
BelerafonL
09.02.2016 18:09Изоляция. Еще стареет изоляция. И она очень не любит ШИМ.
Serge78rus
09.02.2016 18:21Это понятно. Усталость конструкционных материалов тоже рано или поздно наступает. Но там было сравнение с дизелем, который принципиально не может обойтись без пар трения, подверженных износу.
impetus
09.02.2016 18:18и кроме изоляции — железо магнитопроводов перекристаллизовывается (от температрурных качек и вибрации)… мееедленно, но домены растут, «мягкость» его магнитности падает, растёт гистерезис (потери, нагрев, падает момент)…
С изоляцией забавно — напр в советские времена ввиду большой любви населения к «ворошиловке» («ворованному шилу» т.е. техническому спирту) — была директивно-принудительно введена пропитка обмоток эпокситкой разведённой на ацетоне (весь мир спиртом разводит). который растворяет лак проводов. Да ещё, высыхая, «ацетоновая» эпоксидка сильно хрупче будет чем спирторазведённая. В итоге даже если обомотка была выполнена качественным проводом — на выходе сразу с производства двигатель мог иметь места где всё держалось на честном слове от межвиткового замыкания.
Поэтому именно интересует реальная статистика практиков — фирма-поставщик может оценить — сколько движков идёт на новые объекты, а сколько на замену старых и какой давности те старые.

msfs11
09.02.2016 14:54Прошлой зимой наткнулся на видео про обмотку «славянку», где авторы говорят о разных преимуществах.
Мне интересно услышать мнение других специалистов об этом.

diov
09.02.2016 16:55+1Спасибо за статью!
Скажите, пожалуйста, применяется ли в каких-либо двигателях магнитная сборка Халбаха для обмоток статора либо ротора?
Предположительно, она позволит сосредоточить всё магнитное поле в пространстве между статором и ротором, что может повысить эффективность.BelerafonL
09.02.2016 19:13И Вам спасибо, узнал для себя про сборку Халбаха! Как пишут на англоязычной википедии, то она как раз в синхронных машинах с постоянными магнитами иногда и применяется. И статей всяких исследовательских тоже много.
ZloyDirector
09.02.2016 17:18Отличная статья, спасибо!
Могли бы Вы рассказать про авиадвигатель Siemens, упоминался здесь
Какого типа? За счет чего достигнуты подобные характеристики?BelerafonL
09.02.2016 17:28Если вы про это, то, скорее всего, это синхронная машина с магнитами, как в небольших авиамодельках.
В авиамодельках, если посчитать, тоже характеристики этих моторчиков поразительные. С кулак размером они уже имеют мощность в киловатт, а то и больше. А промышленными асинхронниками на киловатт можно держать оборону крепости, сбрасывая вниз. Вот именно такое уменьшение габаритов и дает применение постоянных магнитов. А у сименса там еще, судя по фото, интересная система воздушно-водяного охлаждения — и шланги подводятся, и крыльчатка, и полый ротор.ZloyDirector
09.02.2016 17:36Как Вы счиатете, это наиболее перспективная веть развития электрических двигателей для авиации, или есть что-то более подходящее? (не в смысле сегодняшних результатов, а имеющее бОльший потенциал)
BelerafonL
09.02.2016 17:40Я считаю, что для пропеллеров синхронные машины идеальны. И они уже в этой задаче развиты практически до своего предела — если, конечно, вдруг не появятся еще более легкие и сильные магниты.
Nik_sav
09.02.2016 18:46Для авиации был проект со сверхпроводящими обмотками, но я давно о нем не слышал, похоже заглох.
impetus
09.02.2016 18:28… редкоземельных постоянных магнитов (у них против магнитов полувековой давности порядка на два характеристики)
{kind=link}
dlinyj
В школьные годы мечтал пойти учиться на электропривод, но отговорили, в результате пошёл на «электрические станции». Однако предмет «Электрические машины» так и был самым любимым. Хотя помню, на дни открытых дверей в МЭИ показывали микроконтроллер, программу на ассемблере, управляющая двигателем. Тогда казалось магией. Ныне, конечно всё проще, но тем не менее до сих пор интересно. Это прекрасно, что тут затрагиваются такие темы.
BelerafonL
Мои коллеги подсказывают, что они выставляли в те годы в МЭИ стенд с синхронной машиной, к которой был приделан циферблат со стрелочкой — MSK240 kit на базе микроконтроллера TMS320F240 Texas Instruments. Возможно, вы видели именно это. Вот фото того кита, но без циферблата.
dlinyj
Да, оно. Но на сколько не изменяет память, там были мотороловские чипы. Тогда пугали ассемблером, говорили, вот мол студенты пишут! Казалось просто чудом из чудес. Кто ж знал, что через пару лет сам начну писать на ассемблере, и без всяких институтов :))))