
- Brain-Computer Interface (преодоление виртуальной полосы препятствий с помощью нейроинтерфейса)
- Powered Exoskeleton Race (экзоскелеты)
- Powered Arm Prosthesis Race (протезы рук)
- Powered Leg Prosthesis Race (протезы ног)
- Powered Wheelchair Race (гонки на электроколясках)
- FES Bike Race (соревнование парализованных гонщиков на велосипедах с электростимуляцией)
Наша команда CaterWil участвовала в номинации Powered wheelchair Race.
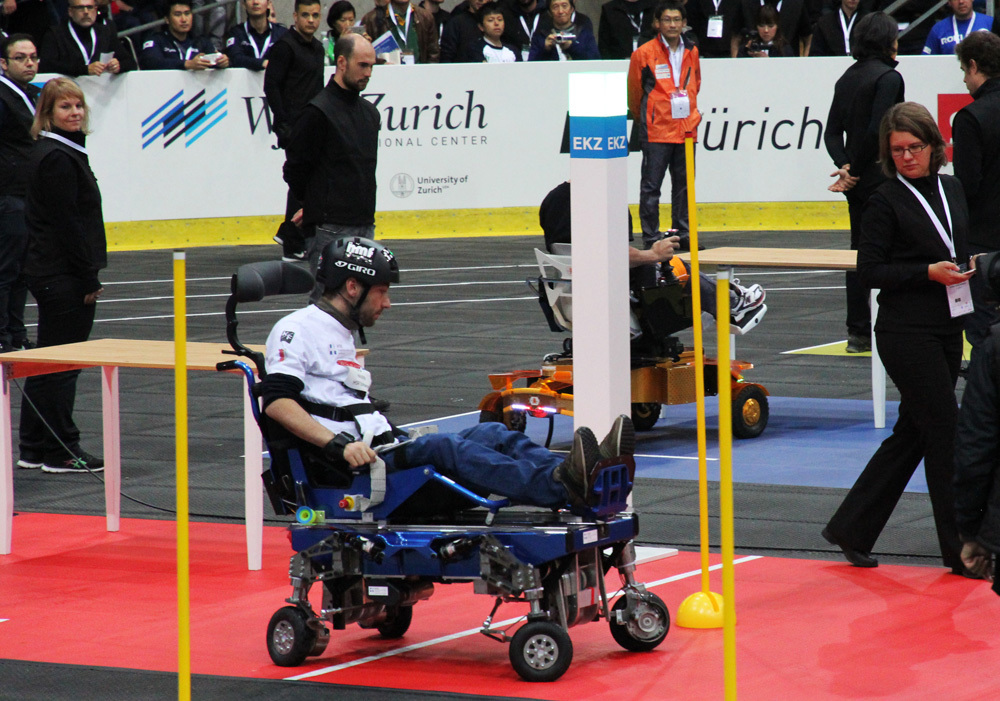
Фишка разработанной нами коляски CaterWil GTS3 заключается в том, что устройство имеет колесную и гусеничную платформы. Мы ее так и называем — коляска-трансформер. Для движения по ровной поверхности пилот использует колеса, а при необходимости преодоления препятствий коляска может превращаться в
Трасса в номинации «Powered wheelchair» состояла из 6 испытаний. Задания расположены по возрастанию сложности:

- Подъехать к столу так, чтобы половина бедра заходила под стол. Испытание показывает насколько коляска применима в быту.

Кстати, сделать эргономичный и эстетичный пульт нам помогла мастерская «ЭКС принт»
- Задание «Змейка». Это упражнение частично раскрывает маневренность устройств.

- Подняться на крутой пандус (20 градусов), открыть дверь, проехать в дверной проем, закрыть дверь, спуститься с пандуса. Очень хорошее испытание, с которым люди на колясках сталкиваются ежедневно.

- Препятствие «Неровная дорога» представляет собой участок с закрепленными под разными углами бревнами. Задание интересно для инженеров, технически непростое, однако в быту не так актуально.

- Препятствие «Наклонная поверхность». Это пятое задание, за него давали много баллов, но на самом деле оно одно из самых простых. Думаю, обычная коляска с электроприводом без труда справится с такой задачей. Но в быту такое препятствие тоже встретишь не часто.

- В задании «Лестницы» нужно заехать на 3 ступени вверх и спуститься на 3 ступени вниз. Лестницы — это самая большая проблема доступной среды для инвалидов-колясочников. Этот вопрос до сих пор актуален по всему миру и будет актуален еще много-много лет, так как поставить лифты и пандусы повсеместно технически невозможно. Это упражнение также является самым интересным с инженерной точки зрения. Для прохождения этого препятствия коляска должна быть не просто вездеходом, а настоящим роботом с целым рядом датчиков и механизмов, позволяющих смещать центр тяжести, карабкаться вверх и безопасно спускаться вниз.

Пилотами «болидов» обязательно должны быть люди с соответствующей инвалидностью. Гонщик нашей команды Юрий Ларин прошел все препятствия на «отлично», набрал максимальное количество очков, но уступил в скорости. По результатам гонок из 12-ти команд со всего мира CaterWil заняла 6-е место.
Турнирная таблица:
| Место |
Страна |
Команда |
Фото |
Баллы |
Время, сек |
| 1 |
Швейцария |
HSR Enhanced |
|
660 |
214 |
| 2 |
Гонконг |
HKUSTwheels |
|
660 |
219 |
| 3 |
Словения |
Avalanche |
|
660 |
267 |
| 4 |
Япония |
RT-Movers |
|
660 |
312 |
| 5 |
Гонконг |
B-Free in City |
|
660 |
358 |
| 6 |
Россия |
CaterWil |
|
660 |
399 |
| 7 |
США |
HERL |
|
530 |
181 |
| 8 |
Великобритания |
Team Imperial |
|
530 |
266 |
| 9 |
Корея |
Enable |
|
426 |
94 |
| 10 |
Греция |
Laddroller |
|
426 |
246 |
| 11 |
Великобритания |
Team Imperial |
|
307 |
102 |
| 12 |
Швейцария |
Scewo |
|
0 |
0 |












Спонсорами участия команды CaterWil в соревнованиях Cybathlon 2016 выступили программа Технологии возможностей и завод «Швабе — Оборона и Защита».
Международные соревнования Cybathlon, как и Олимпийские игры, будут проходить раз в 4 года. Для развития отечественных ассистивных технологий была создана Российская Федерация по Кибатлону. Федерация и мы в ее составе будем организовывать ежегодные Всероссийские соревнования. Следующие будут проходить осенью 2017 года.
Так что, господа инженеры, давайте помогать людям и мериться технологиями!
Комментарии (19)

DrZlodberg
16.11.2016 14:21+1Греки может и не самые проходимые, зато самые практичные. Если электрика накроется — явно можно докатить по-старинке. Как я понимаю гусеницы вообще буксировать проблема. Странно, что B-Free in City так низко пал. У такой конструкции проходимость должна быть отличная.

INevzorov
16.11.2016 14:29B-Free очень хороший девайс для преодоления препятствий, но не очень практичный в жизни. Это все равно что на МТЛБ по трассе ездить. На гусеницах далеко не уедешь — большое сопротивление вращению по сравнению с колесом, больше вибрации и скорость ниже. Вот они по скорости как раз и проиграли.
DrZlodberg
16.11.2016 15:13+1Вообще странно. Спереди явно видны ролики, логично было бы и сзади сделать дублирующие колёса для ровной поверхности (как многие и сделали). Была бы весьма универсальная машинка.
Сопротивление и вибрации не должно быть очень большим. Задние гусеницы явно имеют специальный профиль для их уменьшения. Хотя трение в самой гусенице никто не отменял, да. Скорость в полугусеничном варианте, кстати, тоже не должна сильно падать. Возможно просто неудачный привод использовали или просто перестарались с ограничением скорости.INevzorov
16.11.2016 15:28Тут дело вот в чем. При одной и той же мощности конструкторы выбирают либо высокий момент и низкую скорость либо наоборот высокую скорость и низкий момент. Так вот на гусеницах для преодоления препятствий нужен высокий момент. Для того чтобы обеспечить при этом высокую скорость нужно делать привод мощнее, а значит больше батарей, больше веса, больше цена и так далее.
В нашем варианте у нас разная редукция на колеса и на гусеницы. Мы как раз быстро едем на колесах, и медленно, но с большим моментом едем на гусеницах.DrZlodberg
17.11.2016 08:36Не очень понятно, в чём проблема сделать 2х ступенчатый редуктор для варианта такой двойной гусеницы?
Кстати, а какова мощность привода/количество моторов/ёмкость батарей у подобных конструкций?

lavr02
16.11.2016 15:51+2Греки не самые практичные, говорю как пользователь, в эту коляску без посторонней помощи не сесть
DrZlodberg
17.11.2016 08:18Имелась ввиду концепция в целом. Подлокотники прикрутить не долго (ведь дело в них?)
Есть подозрение, что победитель в этом плане как минимум не лучше.
lavr02
16.11.2016 15:55И плюс еще шейники у которых спина не держит, с лёгкостью из неё вывалятся, в прочем и не только у одних греков такие коляски
INevzorov
16.11.2016 16:01Да, стоит сказать, что многие коляски команды разрабатывали специально для этих соревнований, а для реальной жизни они малопригодны из-за своих габаритов, неповоротливости и тихоходности на ровной поверхности. По моему мнению, хорошими жизненными характеристиками обладают коляски, занявшие 6, 7, 9, 11, 12 места.
KulakovaG
16.11.2016 16:17+1Очень интересные разработки. Немного непонятно, почему, если об испытаниях известно заранее, некоторые команды не подготовили должным образом свои «болиды». Например, к испытанию «Лестницы» была полностью не готова разработка команды Team Imperial.
А наши ребята молодцы! Не уступили в технике, но проиграли по времени прохождения. Радует, что коляска Caterwil отличается безопасностью и устойчивостью, а не предназначена для скоростных маневров. Хотя занять первое место в подобных соревнованиях было бы очень приятно!

garex
16.11.2016 18:17+1Я в последнее время больше склоняюсь к экзоскелетам. Единственный их минус на сегодня — нейроинтерфейсы далеки от совершенства.
INevzorov
16.11.2016 18:25+2Я тоже уверен, что за ними будущее. Я бы к несовершенству нейроинтерфейсов еще недостаточную емкость аккумуляторных батарей добавил. Все-таки процесс хождения значительно более энергоемкий, чем езда на колесах или гусеницах. Но это все вопрос времени, конечно.
lavr02
17.11.2016 07:16+2Экзоскилет конечно хорошо, но он рассчитан на людей с сильными, здоровыми руками, а куда же нам шейникам. пока только в мечтах
garex
17.11.2016 07:36+1Так в том то и цимус, чтобы экзоскелет работал снаружи тела, а с мозга шло управление.
Позволю себе ещё дальше шагнуть — как только разберутся с тем, как работает мозг и нервы и научаться программировать клетки, так сразу можно будет выкинуть все коляски и скелеты и сделать операцию по восстановлению канала мозг-конечность армией робоклеток.
Но к сожаленею человечество ещё так неразвито и занимается исследованиями как сделать оружие чтобы себя убить, а не как сделать что-то действительно полезное, чтобы себя вылечить.

lonelymyp
17.11.2016 11:50А батарейки которые не придётся везти сзади в тележке уже изобрели?
Нейроинтерфейс не так уж и нужен, голосовое управление вполне может справится на первое время.

Robotex
И это все? Только коляски? А в других дисциплинах кто победил?
INevzorov
Вообще материала очень много. Думаю, будет правильно, если каждая российская команда напишет про свою дисциплину. В других номинациях участвовали команды Ortokosmos, Neirobiotics, Neirowalk, Stradivary и Klaiber Bionics. Лучший результат показали Ortokosmos с протезом ноги — заняли 4-е место.