
Для поиска этого пути можно использовать алгоритм поиска по графу, который применим, если карта представляет собой граф. A* часто используется в качестве алгоритма поиска по графу. Поиск в ширину — это простейший из алгоритмов поиска по графу, поэтому давайте начнём с него и постепенно перейдём к A*.
Представление карты
Первое, что нужно при изучении алгоритма — понять данные. Что подаётся на вход? Что мы получаем на выходе?
Вход: алгоритмы поиска по графу, в том числе и A*, получают в качестве входных данных граф. Граф — это набор точек («узлов») и соединений («рёбер») между ними. Вот граф, который я передал A*:

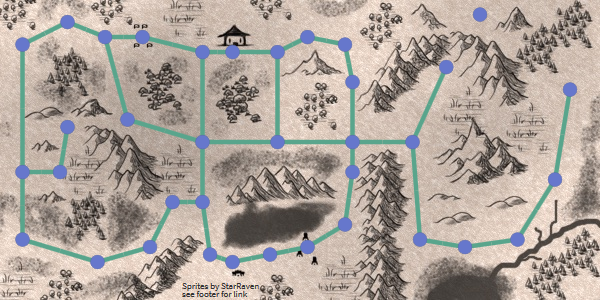
A* не видит ничего другого. Он видит только граф. Он не знает, находится ли что-то в помещении или за его пределами, дверь это или комната, насколько велика область. Он видит только граф! Он не понимает никакой разницы между картой сверху и вот этой:
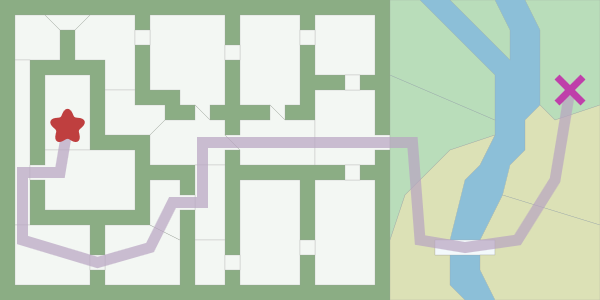
Выход: определяемый A* путь состоит из узлов и рёбер. Рёбра — это абстрактное математическое понятие. A* сообщает нам, что нужно перемещаться из одной точки в другую, но не сообщает, как это нужно делать. Помните, что он ничего не знает о комнатах или дверях, он видит только граф. Вы сами должны решить, чем будет являться ребро графа, возвращённое A* — перемещением с тайла на тайл, движением по прямой линии, открытием двери, бегом по кривому пути.
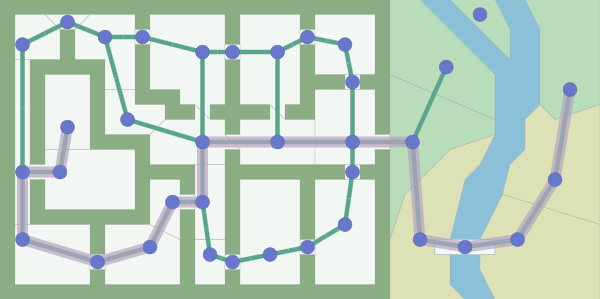
Компромиссы: для каждой игровой карты есть множество разных способов передачи графа поиска пути алгоритму A*. Карта на рисунке выше превращает двери в узлы.
А что, если мы превратим двери в рёбра?

А если мы применим сетку для поиска пути?
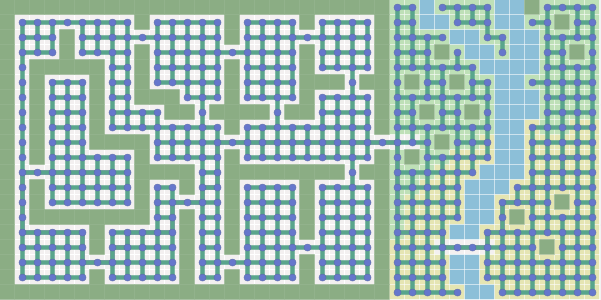
Граф поиска пути не обязательно должен быть тем же, что используется в вашей игровой карте. В карте на основе сеток можно использовать граф поиска пути без сеток, и наоборот. A* выполняется быстрее с наименьшим количеством узлов графа. С сетками часто проще работать, но в них получается множество узлов. В этой статье рассматривается сам алгоритм A*, а не дизайн графов. Подробнее о графах можно прочитать на моей другой странице. Для объяснений я в дальнейшем буду использовать сетки, потому что так проще визуализировать концепции.
Алгоритмы
Существует множество алгоритмов, работающих с графами. Я рассмотрю следующие:

Поиск в ширину выполняет исследование равномерно во всех направлениях. Это невероятно полезный алгоритм, не только для обычного поиска пути, но и для процедурной генерации карт, поиска путей течения, карт расстояний и других типов анализа карт.

Алгоритм Дейкстры (также называемый поиском с равномерной стоимостью) позволяет нам задавать приоритеты исследования путей. Вместо равномерного исследования всех возможных путей он отдаёт предпочтение путям с низкой стоимостью. Мы можем задать уменьшенные затраты, чтобы алгоритм двигался по дорогам, повышенную стоимость, чтобы избегать лесов и врагов, и многое другое. Когда стоимость движения может быть разной, мы используем его вместо поиска в ширину.

A* — это модификация алгоритма Дейкстры, оптимизированная для единственной конечной точки. Алгоритм Дейкстры может находить пути ко всем точкам, A* находит путь к одной точке. Он отдаёт приоритет путям, которые ведут ближе к цели.
Я начну с самого простого — поиска в ширину, и буду добавлять функции, постепенно превращая его в A*.
Поиск в ширину
Ключевая идея всех этих алгоритмов заключается в том, что мы отслеживаем состояние расширяющегося кольца, которое называется границей. В сетке этот процесс иногда называется заливкой (flood fill), но та же техника применима и для карт без сеток. Посмотрите анимацию расширения границы:
Как это реализовать? Повторяем эти шаги, пока граница не окажется пустой:
- Выбираем и удаляем точку из границы.
- Помечаем точку как посещённую, чтобы знать, что не нужно обрабатывать её повторно.
- Расширяем границу, глядя на её соседей. Всех соседей, которых мы ещё не видели, добавляем к границе.
Давайте рассмотрим это подробнее. Тайлы нумеруются в порядке их посещения:
Алгоритм описывается всего в десяти строках кода на Python:
frontier = Queue()
frontier.put(start )
visited = {}
visited[start] = True
while not frontier.empty():
current = frontier.get()
for next in graph.neighbors(current):
if next not in visited:
frontier.put(next)
visited[next] = TrueВ этом цикле заключается вся сущность алгоритмов поиска по графу этой статьи, в том числе и A*. Но как нам найти кратчайший путь? Цикл на самом деле не создаёт путей, он просто говорит нам, как посетить все точки на карте. Так получилось потому, что поиск в ширину можно использовать для гораздо большего, чем просто поиск путей. В этой статье я показываю, как он применяется в играх tower defense, но его также можно использовать в картах расстояний, в процедурной генерации карт и многом другом. Однако здесь мы хотим использовать его для поиска путей, поэтому давайте изменим цикл так, чтобы отслеживать, откуда мы пришли для каждой посещённой точки, и переименуем
visited в came_from:frontier = Queue()
frontier.put(start )
came_from = {}
came_from[start] = None
while not frontier.empty():
current = frontier.get()
for next in graph.neighbors(current):
if next not in came_from:
frontier.put(next)
came_from[next] = currentТеперь came_from для каждой точки указывает на место, из которого мы пришли. Это похоже на «хлебные крошки» из сказки. Нам этого достаточно для воссоздания целого пути. Посмотрите, как стрелки показывают обратный путь к начальной позиции.
Код воссоздания путей прост: следуем по стрелкам обратно от цели к началу. Путь — это последовательность рёбер, но иногда проще хранить только узлы:
current = goal
path = [current]
while current != start:
current = came_from[current]
path.append(current)
path.append(start) # optional
path.reverse() # optionalТаков простейший алгоритм поиска путей. Он работает не только в сетках, как показано выше, но и в любой структуре графов. В подземелье точки графа могут быть комнатами, а рёбра — дверями между ними. В платформере узлы графа могут быть локациями, а рёбра — возможными действиями: переместиться влево, вправо, подпрыгнуть, спрыгнуть вниз. В целом можно воспринимать граф как состояния и действия, изменяющие состояние. Подробнее о представлении карт я написал здесь. В оставшейся части статьи я продолжу использовать примеры с сетками, и расскажу о том, для чего можно применять разновидности поиска в ширину.
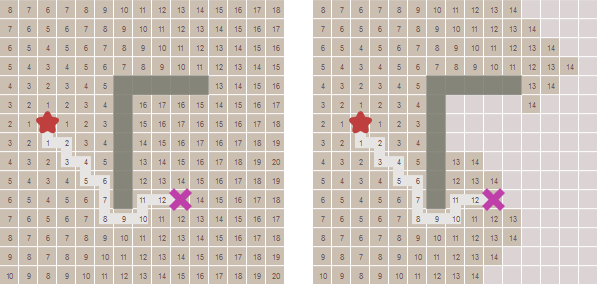
Ранний выход
Мы нашли пути из одной точки во все другие точки. Часто нам не нужны все пути, нам просто нужен путь между двумя точками. Мы можем прекратить расширять границу, как только найдём нашу цель. Посмотрите, как граница перестаёт расширятся после нахождения цели.
Код достаточно прямолинеен:
frontier = Queue()
frontier.put(start )
came_from = {}
came_from[start] = None
while not frontier.empty():
current = frontier.get()
if current == goal:
break
for next in graph.neighbors(current):
if next not in came_from:
frontier.put(next)
came_from[next] = currentСтоимость перемещения
Пока мы делали шаги с одинаковой стоимостью. В некоторых случаях поиска путей у разных типов движения есть разная стоимость. Например, в Civilization движение через равнины или пустыню может стоить 1 очко движения, а движение через лес — 5 очков движения. На карте в самом начале статьи прохождение через воду стоит в 10 раз дороже, чем движение по траве. Ещё одним примером является диагональное движение в сетке, которое стоит больше, чем движение по осям. Нам нужно, чтобы поиск пути учитывал эту стоимость. Давайте сравним количество шагов от начала с расстоянием от начала:

Для этого нам нужен алгоритм Дейкстры (также называемый поиском с равномерной стоимостью). Чем он отличается от поиска в ширину? Нам нужно отслеживать стоимость движения, поэтому добавим новую переменную
cost_so_far, чтобы следить за общей стоимостью движения с начальной точки. При оценке точек нам нужно учитывать стоимость передвижения. Давайте превратим нашу очередь в очередь с приоритетами. Менее очевидно то, что у нас может получиться так, что одна точка посещается несколько раз с разной стоимостью, поэтому нужно немного поменять логику. Вместо добавления точки к границе в случае, когда точку ни разу не посещали, мы добавляем её, если новый путь к точке лучше, чем наилучший предыдущий путь.frontier = PriorityQueue()
frontier.put(start, 0)
came_from = {}
cost_so_far = {}
came_from[start] = None
cost_so_far[start] = 0
while not frontier.empty():
current = frontier.get()
if current == goal:
break
for next in graph.neighbors(current):
new_cost = cost_so_far[current] + graph.cost(current, next)
if next not in cost_so_far or new_cost < cost_so_far[next]:
cost_so_far[next] = new_cost
priority = new_cost
frontier.put(next, priority)
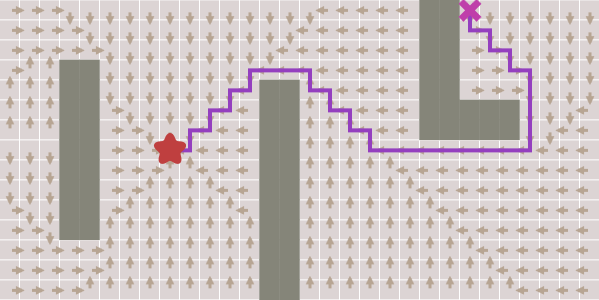
came_from[next] = currentИспользование очереди с приоритетами вместо обычной очереди изменяет способ расширения границы. Контурные линии позволяют это увидеть. Посмотрите видео, чтобы понаблюдать, как граница расширяется медленнее через леса, и поиск кратчайшего пути выполняется вокруг центрального леса, а не сквозь него:
Стоимость движения, отличающаяся от 1, позволяет нам исследовать более интересные графы, а не только сетки. На карте в начале статьи стоимость движения основана на расстоянии между комнатами. Стоимость движения можно также использовать, чтобы избегать или предпочитать области на основании близости врагов или союзников. Интересная деталь реализации: обычная очередь с приоритетами поддерживает операции вставки и удаления, но в некоторых версиях алгоритма Дейкстры используется и третья операция, изменяющая приоритет элемента, уже находящегося в очереди с приоритетами. Я не использую эту операцию, и объясняю это на странице реализации алгоритма.
Эвристический поиск
В поиске в ширину и алгоритме Дейкстры граница расширяется во всех направлениях. Это логичный выбор, если вы ищете путь ко всем точкам или ко множеству точек. Однако обычно поиск выполняется только для одной точки. Давайте сделаем так, чтобы граница расширялась к цели больше, чем в других направлениях. Во-первых, определим эвристическую функцию, сообщающую нам, насколько мы близки к цели:
def heuristic(a, b):
# Manhattan distance on a square grid
return abs(a.x - b.x) + abs(a.y - b.y)В алгоритме Дейкстры для порядка очереди с приоритетами мы использовали расстояние от начала. В жадном поиске по первому наилучшему совпадению для порядка очереди с приоритетами мы вместо этого используем оцененное расстояние до цели. Точка, ближайшая к цели, будет исследована первой. В коде используется очередь с приоритетами из поиска в ширину, но не применяется
cost_so_far из алгоритма Дейкстры:frontier = PriorityQueue()
frontier.put(start, 0)
came_from = {}
came_from[start] = None
while not frontier.empty():
current = frontier.get()
if current == goal:
break
for next in graph.neighbors(current):
if next not in came_from:
priority = heuristic(goal, next)
frontier.put(next, priority)
came_from[next] = currentДавайте посмотрим, как это работает:
Ого! Потрясающе, правда? Но что случится на более сложной карте?
Эти пути не являются кратчайшими. Итак, этот алгоритм работает быстрее, когда препятствий не очень много, но пути не слишком оптимальны. Можно ли это исправить? Конечно.
Алгоритм A*
Алгоритм Дейкстры хорош в поиске кратчайшего пути, но он тратит время на исследование всех направлений, даже бесперспективных. Жадный поиск исследует перспективные направления, но может не найти кратчайший путь. Алгоритм A* использует и подлинное расстояние от начала, и оцененное расстояние до цели.
Код очень похож на алгоритм Дейкстры:
frontier = PriorityQueue()
frontier.put(start, 0)
came_from = {}
cost_so_far = {}
came_from[start] = None
cost_so_far[start] = 0
while not frontier.empty():
current = frontier.get()
if current == goal:
break
for next in graph.neighbors(current):
new_cost = cost_so_far[current] + graph.cost(current, next)
if next not in cost_so_far or new_cost < cost_so_far[next]:
cost_so_far[next] = new_cost
priority = new_cost + heuristic(goal, next)
frontier.put(next, priority)
came_from[next] = currentСравните алгоритмы: алгоритм Дейкстры вычисляет расстояние от начальной точки. Жадный поиск по первому наилучшему совпадению оценивает расстояние до точки цели. A* использует сумму этих двух расстояний.
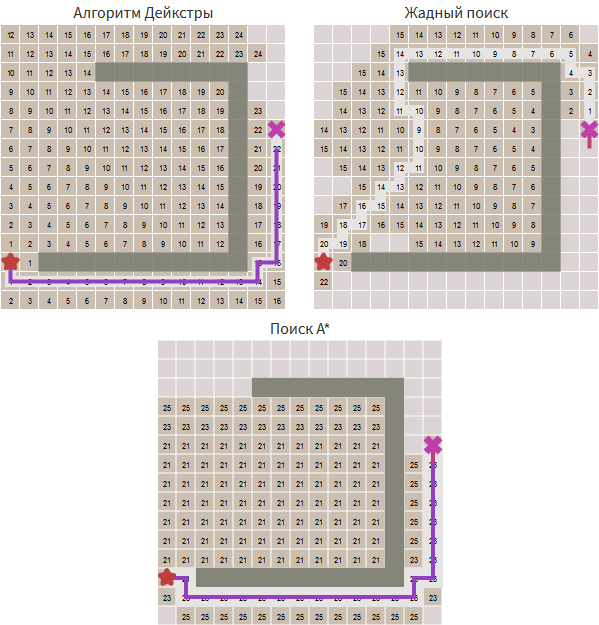
Попробуйте в оригинале статьи делать отверстия в разных местах стены. Вы обнаружите, что жадный поиск находит правильный ответ, A* тоже его находит, исследуя ту же область. Когда жадный поиск по первому наилучшему находит неверный ответ (более длинный путь), A* находит правильный, как и алгоритм Дейкстры, но всё равно исследует меньше, чем алгоритм Дейкстры.
A* берёт лучшее от двух алгоритмов. Поскольку эвристика не оценивает расстояния повторно, A* не использует эвристику для поиска подходящего ответа. Он находит оптимальный путь, как и алгоритм Дейкстры. A* использует эвристику для изменения порядка узлов, чтобы повысить вероятность более раннего нахождения узла цели.
И… на этом всё! В этом и заключается алгоритм A*.
Дополнительное чтение
Вы готовы реализовать его? Попробуйте использовать готовую библиотеку. Если вы хотите реализовать его самостоятельно, то у меня есть инструкция по пошаговой реализации графов, очередей и алгоритмов поиска пути на Python, C++ и C#.
Какой алгоритм стоит использовать для поиска путей на игровой карте?
- Если вам нужно найти пути из или ко всем точкам, используйте поиск в ширину или алгоритм Дейкстры. Используйте поиск в ширину, если стоимость движения одинакова. Используйте алгоритм Дейкстры, если стоимость движения изменяется.
- Если нужно найти пути к одной точке, используйте жадный поиск по наилучшему первому или A*. В большинстве случаев стоит отдать предпочтение A*. Когда есть искушение использовать жадный поиск, то подумайте над применением A* с «недопустимой» эвристикой.
А что насчёт оптимальных путей? Поиск в ширину и алгоритм Дейкстры гарантированно найдут кратчайший путь по графу. Жадный поиск не обязательно его найдёт. A* гарантированно найдёт кратчайший путь, если эвристика никогда не больше истинного расстояния. Когда эвристика становится меньше, A* превращается в алгоритм Дейкстры. Когда эвристика становится больше, A* превращается в жадный поиск по наилучшему первому совпадению.
А как насчёт производительности? Лучше всего устранить ненужные точки графа. Если вы используете сетку, то прочитайте это. Уменьшение размера графа помогает всем алгоритмам поиска по графам. После этого используйте простейший из возможных алгоритмов. Простые очереди выполняются быстрее. Жадный поиск обычно выполняется быстрее, чем алгоритм Дейкстры, но не обеспечивает оптимальных путей. Для большинства задач по поиску путей оптимальным выбором является A*.
А что насчёт использования не на картах? Я использовал в статье карты, потому что думаю, что на них проще объяснить работу алгоритма. Однако эти алгоритмы поиска по графам можно использовать на любых графах, не только на игровых картах, и я пытался представить код алгоритма в виде, не зависящем от двухмерных сеток. Стоимость движения на картах превращается в произвольные веса рёбер графа. Эвристики перенести на произвольные карты не так просто, необходимо создавать эвристику для каждого типа графа. Для плоских карт хорошим выбором будут расстояния, поэтому здесь мы использовали их.
Я написал ещё много всего о поиске путей здесь. Не забывайте, что поиск по графам — это только одна часть того, что вам нужно. Сам по себе A* не обрабатывает такие аспекты, как совместное движение, перемещение препятствий, изменение карты, оценку опасных областей, формации, радиусы поворота, размеры объектов, анимацию, сглаживание путей и многое другое.
Комментарии (19)



XopHeT
21.06.2017 09:38Только недавно с этими алгоритмами разобрался сам.
Эта статья значительно сократила бы время на изучение.
Спасибо!

AstarothAst
21.06.2017 09:56А если нужно искать пути в трехмерном пространстве, как, например, в Dwarf Fortress, то какие алгоритмы используются? Можно ожидать статьи по ним?
khim
21.06.2017 10:01Вы бы статью-то прочитали перед тем, как комментировать, а? Желательно — до конца.
AstarothAst
21.06.2017 10:05Каюсь, виноват, отложил полное прочтение на потом. Если ответ в статье есть, то был неправ, считаю произошедшее безобразной ошибкой, раскаиваюсь, прошу дать возможность загладить, искупить.
khim
21.06.2017 10:36+1Алгоритмам, о которых идёт речь в статье, в общем-то, пофигу, сколько у вас там измерений (и даже неважно — конечно ли их часто), они слишком общие. Для двухмерных/трёхмерных и прочих частных случаев, разумеется, есть отдельные алгоритмы — но это уже совсем другая история.

slavenski
23.06.2017 09:16Хорошая статья, хотелось бы узнать, а при большом количестве вершин, сравним ли А* с муравьиными алгоритмами?, заранее прошу прощения, если задал неуместный вопрос.
Idot
26.06.2017 10:57А можно модифицировать так чтобы он давал не самый оптимальный маршрут?
А то беда шутеров: когда противник ломится по наикратчайшему пути давая себя легко расстрелять, и никто даже не пытается обойти с тыла или с фланга.

PatientZero
26.06.2017 11:08Можно динамически менять стоимость движения для разных врагов, получится, что для кого-то путь с фланга окажется более дешёвым. А вообще, подозреваю, что решения типа «зайти с тыла» принимается на уровне выше, в ИИ, а не в поиске путей.
khim
26.06.2017 12:55Можно и в поиске путей. Просто повысьте «цену» каждого метра, который ты проходишь «под дулом» автомата (а это, как бы, и итуитивно ясно, ведь правда?) — и все противники пойдут в обход как миленькие.
Проблема в другом: как только противник всему этому научится, станет всё верно рассчитывать и оценивать — получится у вас AlphaGo. И? Кто потом это купит?
Боты в играх с неплохим бюджетом тупые не потому, что разрабы не смогли их сделать умными, поверьте мне.PatientZero
26.06.2017 13:10Да, понятно, что нет никаких проблем сделать бота всевидящим, всезнающим и раздающим хедшоты с одного выстрела. Но разнообразное поведение интересно игроку: один враг отвлекает стрельбой из укрытия, остальные обходят с флангов и потом, естественно, все они эффектно погибают :)
Idot
26.06.2017 13:23Это легко исправляется тем как часто боты будут мазать.
А тупые противники быстро приедаются.

dmagin
27.06.2017 15:42Традиционно в подобных темах не вижу алгебраического подхода.
Поэтому оставляю ссылки на свои статьи на хабре — Первая часть и Вторая часть.
В которых показано, что можно один раз рассчитать дистанционную матрицу между всеми узлами графа и потом легко находить пути между двумя заданными узлами через возмущение потенциалов узлов.
Кроме того, необязательно также пересчитывать всю матрицу, если изменились параметры какой-либо связи — есть простые формулы корректировки матрицы.
Единственное ограничение — если узлов очень много (тысячи), то первоначальный расчет может быть долгим — используется обращение матрицы.
Steed
Спасибо, отличная вводная статья с понятными картинками и не переусложненным кодом. Разобраться было просто. Более того, захотелось еще поэкспериментировать (а что будет, если поменять эвристику A* и т.п.) :)
khim
A* всегда выдаёт кратчайший маршрут, но от эвристики очень сильно зависит обьём вычислений.
TheShock
А у меня в этом сервисе A* выдает разные маршруты
khim
Никто не обещал, что A* выдаст тот же самый маршрут. Может и другой, если оптимальных больше, чем один.
В этой самом статье, которую мы комментируем, написано чего требуется от эвристики.
Steed
Цитата из статьи: "A* гарантированно найдёт кратчайший путь, если эвристика никогда не больше истинного расстояния."
Что понятно, т.к. при нулевом коэффициенте при расстоянии она становится жадным алгоритмом. Мне сразу интересно: равенство коэффициентов — это фазовый переход, или нет? Т.е. есть ли сценарии, когда истинное расстояние меньше эвристики, но при этом алгоритм всегда находит кратчайший путь.