
Преследуя детскую мечту сделать робота, я попал на форум cyber-place.ru в поисках информации около года назад (не сочтите за рекламу). В своих самых смелых фантазиях, меня грела мысль о создании собственного робота телеприсутствия, с возможностью перемещения в пространстве, видео и двусторонней аудио связью, с удаленным управлением через телефон или компьютер. Вдохновился моделью на базе роутера tplink 3020 с прошивкой Cyberwrt. Не знание темы и большие пробелы в образовании не стали помехой на пути моего маниакального желания добиться результата, как следствие путь проб и ошибок и сгоревшая электроника.
После почти года «учебы на своих ошибках» появились первые результаты, машинка с возможностью управления через интернет на базе Cyberbot -3, за что огромная благодарность ее разработчикам, ребята проделали действительно огромную работу! (Для меня программирование и создание софта это просто космос!) Машинку делали многие, состав оборудования и подробные инструкции есть на бескрайних просторах интернета. Поэтому останавливаться на этом не вижу смысла.

Далее возникла необходимость в автономности устройства, соорудил (из подручных средств) «зарядную станцию», в передней части робота закрепил подпружиненные контакты. Основное питание робота выбрано 4.2В для возможности заряда от 5в блока питания. Для увеличения зарядного тока два модуля TP4056 спаял в параллель. Управлял всем этим хозяйством через интернет по телефону, через браузер.


Наигравшись полученной моделью решил, нужно двигаться дальше. К сожалению так и не нашел способа (думаю что все еще впереди) управлять устройством по на базе одного, главного контроллера.
Так как данное оборудование не позволяет организовать двустороннюю аудио связь, не нашел лучше выхода как использовать камеру видеонаблюдения DS-2CD2432F — IW, данная камера при поддержке стороннего софта на андроиде (tinyCam PRO) дает возможность видеоконтроля и двухстороннего аудио. Изначально была (бредовая) идея подключиться к инженерному разъему камеры для того чтобы считать uart, использовать штатное ПО камеры для управления передвижением роботизированной тележки. Использовать ПТЗ камеры для перемещения. Планировал считать какие команды валятся на uart при нажатии влево, вправо, вниз, вверх у камеры которая не является поворотной, далее эти команды гнать на uart ардуино нано, которая должна была управлять моторами, так я хотел решить основную проблему для себя, не умение писать софт. Идея не увенчалась успехом, производитель заблокировал данные команды, кроме сообщения «ptz not support» при нажатии на кнопки ПТЗ в uart ничего не приходило.
Поэтому «камера на колесах», а не робот телеприсутствия стало результатом моих усилий.
Для управления устройством с телефона, использую возможность открывать несколько приложений на андроиде, так называемые «плавающие окна» (В поздних версиях работает без сторонних приложений типа floating apps ). Приходится открывать два приложения, tinyCam PRO для доступа к интерфейсу камеры и браузер для доступа к управлению тележкой.
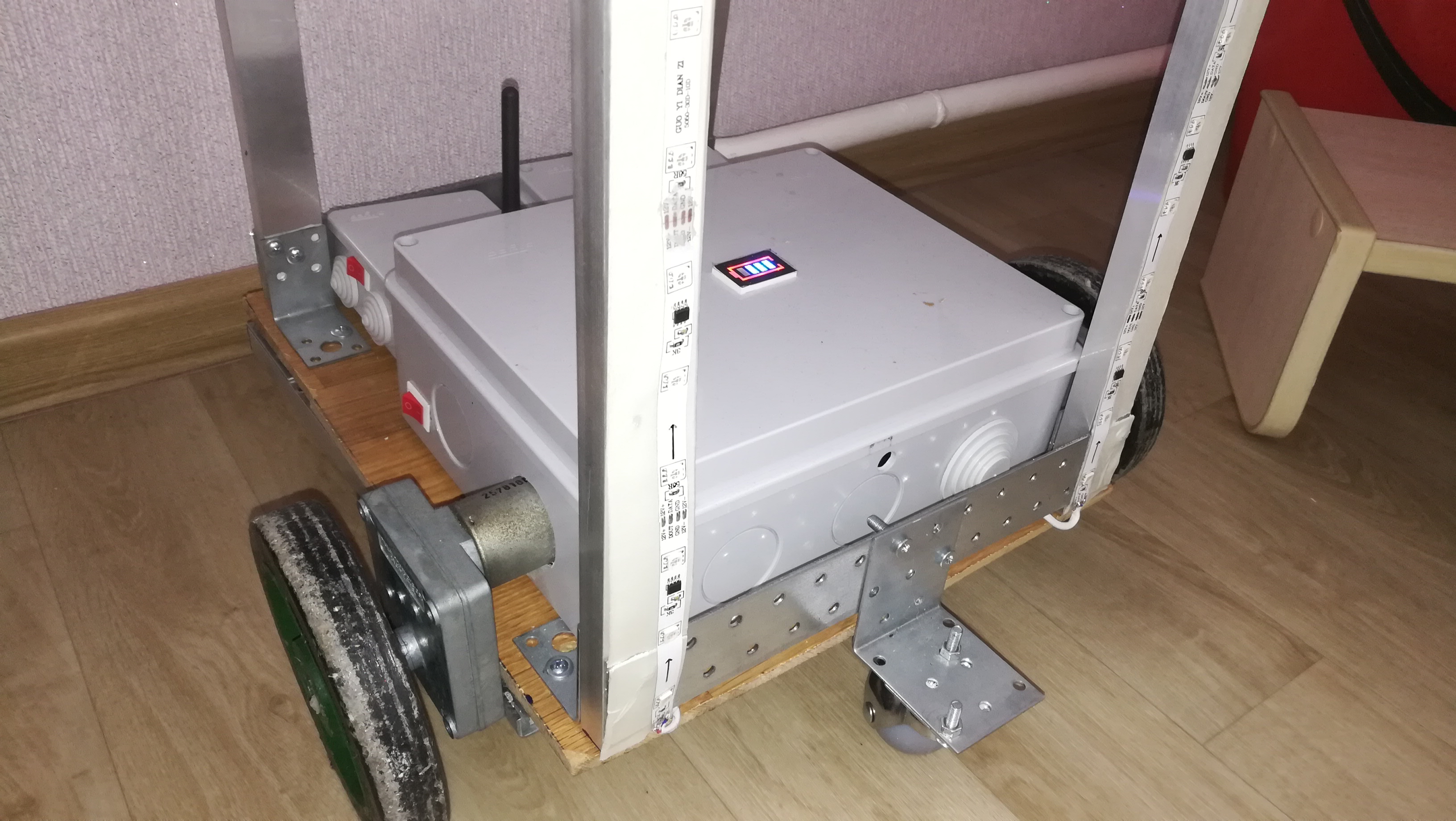
Итак, результат: электрическая коммутационная коробка в качестве бокса для размещения оборудования tp link 3020 с прошивкой CyberWRT, припаянная антенна, +10дцб в моем случае, ардуино нано получающее по uart команды от вэб интерфейса роутера, монстр мотор шилд для управления мощными мотор редукторами изъятыми из старых игровых автоматов.

Высота робота 165см, вес около 10 кг, питание 12.6В (литиевая сборка 18650 + контроллер заряда с балансиром), банка из — под майонеза вместо головы, в которой спрятана камера, штатный динамик камеры заменен на 5 вт колонку, чтобы меня лучше было слышно. Глаза — два светодиода вставленные в светоотражатели из под фонарей, управляются глаза из интерфейса кибербота, две адресные светодиодные ленты и доп контроллер ардуино про мини для управления ими (спасибо Алексу Гайверу, передрал его проект «огненный светильник»).
Управляется лента через модуль реле, по команде, также по интерфейсу кибербота.
Несуразный внешний вид обусловлен тем, что робота наряжал и поздравлять коллег с 8 марта. (Робот выезжал под музыку из терминатора, управляемый мной из укромного места, заморочился светомузыкой и плавным включение светодиодов, публика была в восторге).


В дальнейшем планирую освоить работу с манипулятором, убрать все «лишнее», подобрать необходимое оборудование (заменить роутер и ардуинку на ESP32) и софт для того чтобы «конструкцией» смогла управлять даже моя бабушка :)) Тема раскрыта не полностью, многие моменты не освещал дабы не затягивать и так длинный пост, если тема вам понравилась, жду вашей критики и советов.
Комментарии (12)

DEM_dwg
11.03.2019 20:51CyberWRT хорош с одной стороны, с другой маловато мощей гораздо удобнее использовать расперебри или аналогичные мини ПК.

iliasam
11.03.2019 22:07+2«Бум робототехники последних лет»
У меня почему-то сложилось ощущение, что последнее время у нас в стране стало меньше людей, интересующихся любительской робототехникой.
Возможно потому, что люди собирают различные самоходные конструкции, но дальше дистанционного управления и простых алгоритмов движения очень мало кто идет и конструкция становится неинтересной создателю.
В результате интернет полон описаний, как сделать самоходную конструкцию, но примеров чего-то более сложного и практически полезного — единицы.
Areso
11.03.2019 23:09Потому что у нас Starship не доедет от пиццерии до офисника, или от магазина до дома.
Климат не тот!И дороги, и люди — не подходят. А обвешивать тележку вооружением нельзя.
Вот, кстати говоря, моя поделка, управляемая через Интернет (старая платформа):
Скучная видеозапись на YouTubeandrey_ssh
12.03.2019 03:56Для увеличения зарядного тока два модуля TP4056 спаял в параллель
«Нельзя просто так взять и запараллелить источники напряжения»
Впрочем, для зарядных устройств ситуация несколько проще.timdorohin
12.03.2019 14:59TP4056 ЕМНИП источник тока с отсечкой по напряжению, так что ничего страшного не случится.

localkost
13.03.2019 08:27Есть неплохой проект робота телеприсутствия на базе ESP32 и дешевой arduino камеры. Правда разрешение там всего 160Х120, но для данного применения это и не имеет особого значения)
hackaday.io/project/163542-esp32-wifi-robot
andrushai Автор
13.03.2019 09:04Очень интересный вариант, на есп32 повторял что -то подобное, правда камера была все та же, для управлением использовал андроид приложение blink, в котором был виджет «джойстик» для управления ходовой частью, «стримил» видео с вай фай камеры в сеть в моем случае со звуком. Приложение позволяет воспроизводить стрим поток со звуком через один из своих виджетов.
localkost
13.03.2019 12:31Сам время от времени пользуюсь приложением blink. Отличная штука) Позволяет сильно упростить системы удаленного управления и мониторинга)
null3r
13.03.2019 08:27на последнем фото
чупакабраробот не слишком ли высок?
а то получится что у вас с камеры не видно будет что «под ногами», как в этом случае передвигаться?andrushai Автор
13.03.2019 08:52+1На счет чупокабры, трудно с вам не согласится, напомню что данное «изделие» было предназначено для одного выступления на празднике и носило скорее сатирический характер. Что касается управления роботом, камера сверху получает общий обзор и вся конструкция имеет возможность «смотреть» по сторонам с помощью сервопривора SG-95, первоначально данный привод осуществлял подъем и опускание «Головы» (банки), но так как вес банки оказался достаточно большим, серва издавала жужжание, пытаясь выйти на необходимый угол, что мешало воспринимать речь собеседника. В ввиду сжатых сроков для дополнительного ориентирования в пространстве ни чего не придумал лучше вебки, /маленькое отверстие в коробке/ которая установленная внизу конструкции и работающая через интерфейс роутера. (Добавил скрин с телефона и фото основной «коробки»
Alyoshka1976
Расскажите о ходовой части побольше, интересно. У тележки привод на все четыре колеса и разворот по «танковому»?
andrushai Автор
Да ходовая часть на танковой основе, два ведущих мотор редуктора, два поддерживающего колеса, спереди и сзади, для устойчивости. Логическая часть ардуино нано, силовая монстр мотор шилд, ток при блокировке колес достигает 4А, при развороте одно колесо вперёд другое назад. Реализовано регулирование скорости вращения ШИМом