

В мире робототехники давно и успешно развивается программный фреймворк, позволяющий быстро прототипировать робототехнические системы — Robot Operating System (ROS). Мы в Лаборатории робототехники Сбербанка активно применяем его в разработке собственных проектов. Накопив определенный опыт и заметив, что в России еще не проходило ни одного практического митапа по ROS, мы решили его организовать и поделиться знаниями, а заодно познакомиться c сообществом робототехников. Уже 16 апреля в Сколково в рамках Форума Skolkovo Robotics 2019 пройдет ROS Russian Meetup 2019 – это возможность для разработчиков ROS и робототехников всех уровней посвятить один день живому обмену опытом и общению с сообществом. Если вы знакомы с ROS, то можно смело переходить на форму регистрации, там же размещена программа и организационная информация. На митапе мы обсудим историю ROS и принципы сообщества, уделим много времени практическим докладам про SLAM и навигацию по лазерному лидару внутри помещений, про планировщик пути робота. Покажем как управлять промышленными манипуляторами через ROS, как использовать данные сенсоров, как работать с машиной состояний SMACH. И даже расскажем, как без проблем установить себе ROS и начать разработку робота.
Кстати, участие в митапе бесплатное, но поскольку количество мест ограничено, то мы просим дождаться подтверждения. А для тех, кто не знаком с ROS, предлагаем небольшой обзор.

Двумерный взгляд на мир глазами ROS
Robot Operating System — это программный фреймворк для роботов, реализующий основные алгоритмы для построения сложных роботов. В него включен набор инструментов, библиотек и стандартов, призванных упростить задачу создания сложного и надежного поведения робота на самых разнообразных роботизированных платформах.
Основной идеологии проекта являются принципы open source, документирование пакетов, повторного использования кода и глобального сообщества робототехников.
Зачем он был создан
Создавать действительно надежное универсальное программное обеспечение для роботов сложно. С точки зрения робота проблемы, которые кажутся человеку тривиальными, выливаются в высокую трудоемкость программирования робототехнической системы разработчиком. Работать с этими задачами настолько сложно, что решать их в одиночку или небольшим коллективом подчас не представляется возможным.
В результате ROS был создан с нуля, чтобы стимулировать совместную разработку программного обеспечения для робототехники. Например, одна лаборатория может иметь экспертов по SLAM в помещениях и может предложить систему мирового класса для SLAM. У другой группы могли бы быть эксперты в использовании SLAM для навигации, и еще одна группа могла бы разработать подход компьютерного зрения, который хорошо работает для распознавания небольших объектов в беспорядочной среде. ROS был разработан специально для таких групп, чтобы сотрудничать и опираться на работу друг друга.
Короткая предыстория
ROS — это большой проект с историей и большим количеством участников. Потребность в открытой системе сотрудничества была необходима многим людям в сообществе исследователей робототехники, и для этой цели было создано множество проектов.
В середине 2000-х годов в Стэнфордском университете были предприняты различные усилия, связанные с использованием ИИ в робототехнике, например, программа STanford AI Robot (STAIR) и программа Personal Robots (PR) для создания собственных прототипов динамических программных систем, предназначенных для использования в робототехнике. В 2007 году Willow Garage предоставил значительные ресурсы для дальнейшего расширения этих концепций и создания прототипов. Усилия были поддержаны бесчисленными исследователями, которые поделились своим временем и опытом как для вклада в основные идеи ROS, так и в основные пакеты программного обеспечения. Все программное обеспечение разрабатывалось с использованием лицензии BSD с открытым исходным кодом и постепенно стало широко используемой платформой в сообществе исследователей робототехники.
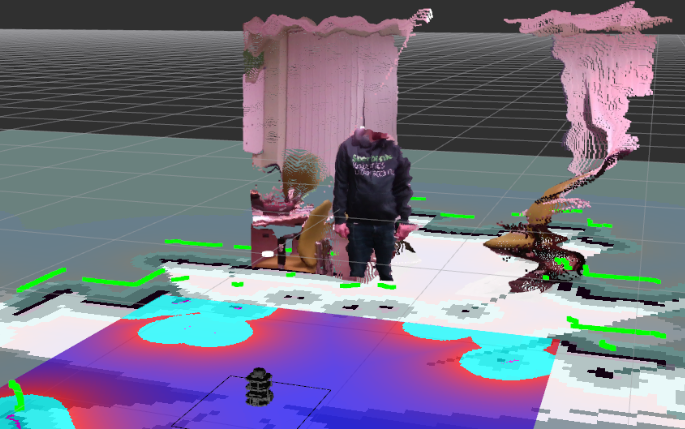
Трехмерный взгляд на мир глазами ROS
Глобальное сообщество ROS
С самого начала ROS разрабатывался в нескольких учреждениях и для нескольких роботов, в том числе во многих учреждениях, которые получили роботов PR2 от Willow Garage. Хотя для всех участников было бы гораздо проще разместить свой код на одних и тех же серверах, со временем «федеративная» модель стала одной из сильных сторон экосистемы ROS. Любая группа может запустить свое собственное хранилище кода ROS на своих собственных серверах, и они полностью владеют им и контролируют его. Им не нужно чье-либо разрешение. Если они решат сделать свой репозиторий общедоступным, они могут получить признание сообщества, которого они заслуживают за свои достижения, и получить выгоду от тестеров и предложений по улучшению, как и все проекты с открытым исходным кодом.
За последние несколько лет ROS вырос и теперь включает в себя большое сообщество пользователей по всему миру. Исторически сложилось так, что большинство пользователей были в исследовательских лабораториях, но все чаще они появляются в коммерческом секторе, особенно в промышленной и сервисной робототехнике.
Сообщество ROS очень активно и насчитывает более 3000 участников в списке discourse.ros.org, более 8000 пользователей на вики-странице совместной документации и около 22500 пользователей на сайте ответов на вопросы по ROS. В Википедии содержится более 22 000 страниц, а темп правок — около 30 в день.
На данный момент количество русскоязычных пользователей ROS находится на 15 месте среди других стран согласно ROS Metrics Report 2018. Давайте встретимся, обсудим и исправим это. Так же вы сможете узнать о возможностях ROS для ваших проектов, о реальной практике разработки роботов.
Чтобы принять участие в качестве слушателя заполните форму.
А если у вас есть интересное сообщение для сообщества, еще можно стать спикером.
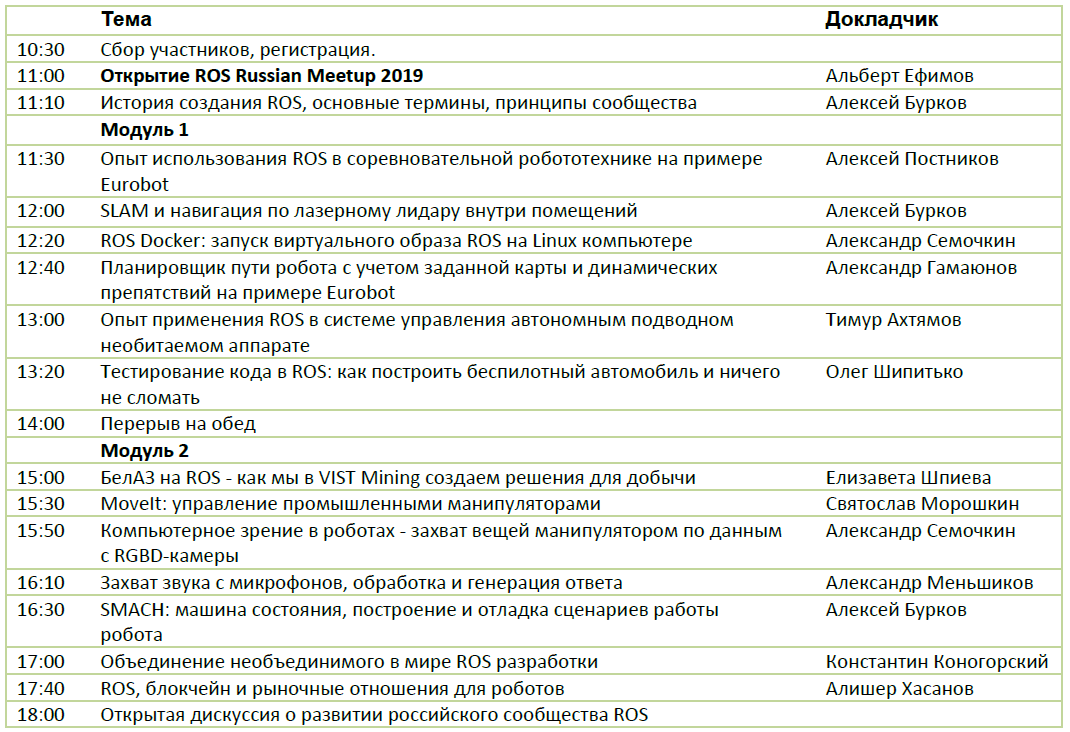
Программа:
Организатор мероприятия — Лаборатория робототехники Сбербанка.


Guronn
Видеозапись будет вестись, выложите потом? Если да, то где ее ожидать?
Abulaphia Автор
нет, не планируем. это ведь meetup)
xDimus
не все ведь живут в столице(
Abulaphia Автор
понимаю. следите за новостями. возможно, лучшие выступления мы выложим.