
В своей работе я использую MicroPython для прототипирования, быстрой проверки идей и для создания небольших стендов. Благодаря REPL и простому синтаксису MicroPython также отлично подходит для DIY проектов и для обучения программированию.
Когда речь заходит о взаимодействии компьютеров с реальным миром, меня всегда интересует скорость их взаимодействия. В некоторых случаях использования микропроцессорной техники, например в сфере интернета вещей, скорость реакции устройства не так важна. Нет особой разницы когда включится сирена сигнализации: через 10 микросекунд после обнаружения движения или через 10 миллисекунд.
Но в некоторых аспектах, скорость работы и время реакции важно и встаёт вопрос о целесообразности использования MicroPython. Поэтому я провел небольшое исследование, на которое меня вдохновило видео с выступления создателя MicroPython Damien George. Мне стало интересно как быстро программа, написанная на Micropython будет реагировать на входное воздействие.
Подопытным устройством будет микроконтроллер ESP8266, на плате NodeMcu с MicroPython версии esp8266-2018511-v1.9.4 на борту.
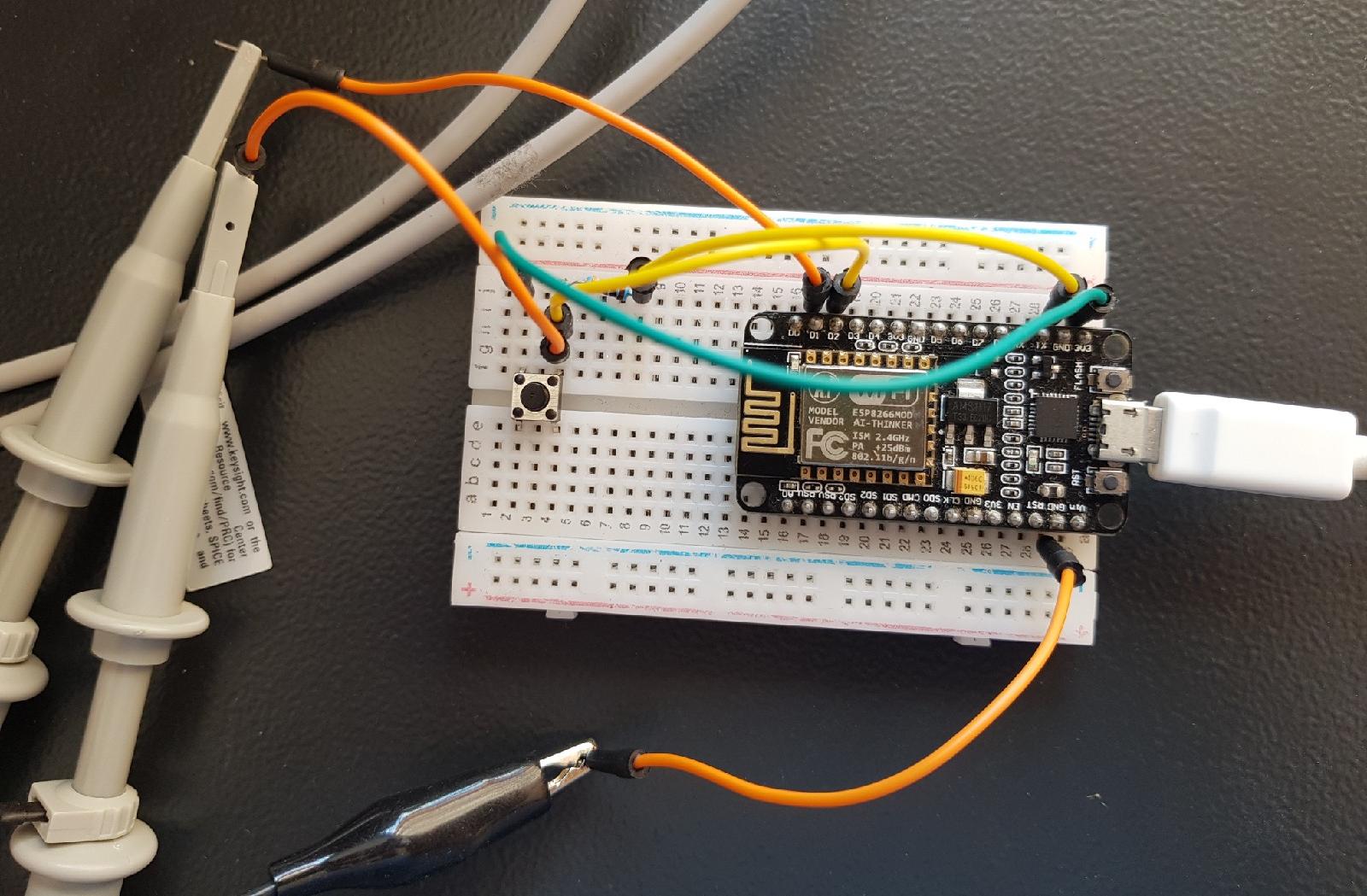
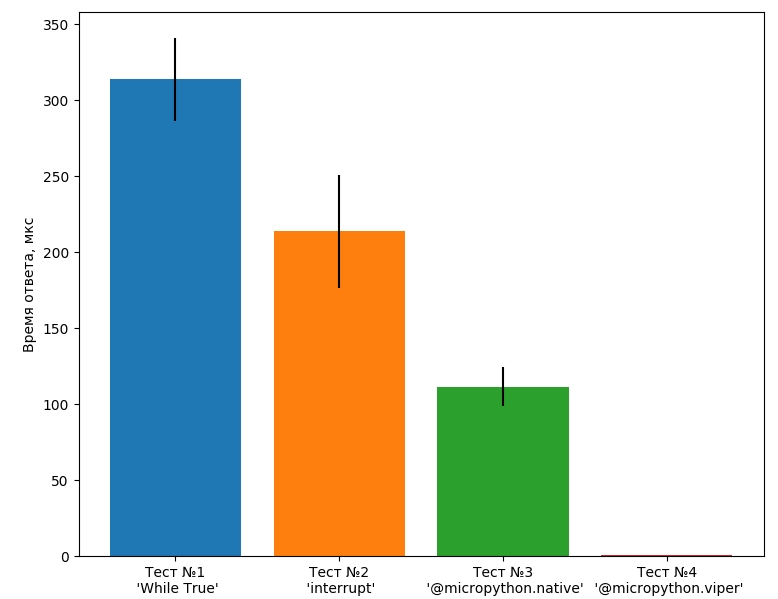
Я буду нажимать на кнопку и регистрировать на осциллографе разницу во времени между нажатием и появлением 3.3 В на другой ножке микропроцессора. Каждое измерение делается 15 раз, берётся среднее (проиллюстрировано на графиках) и рассчитывается стандартное отклонение (чёрная полоса на графиках).
Тест №1.
Если решать эту задачу «в лоб», то программа выглядит довольно тривиально:
import machine
import time
o = machine.Pin(5, machine.Pin.OUT) #D1 out
i = machine.Pin(4, machine.Pin.IN) #D2 in
while 1:
if i.value():
o.value(1)
time.sleep(0.1)
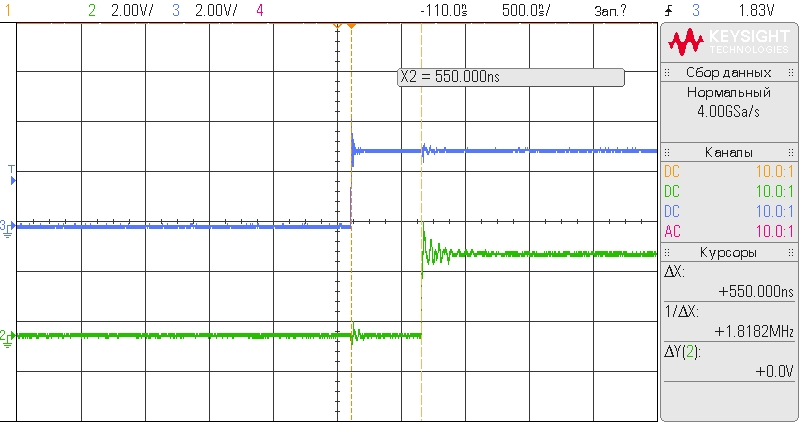
o.value(0)Типичная осциллограмма при такой программе выглядит так:
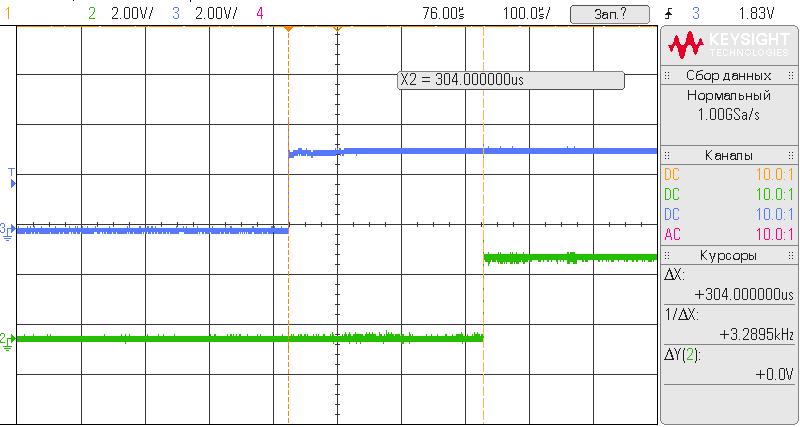
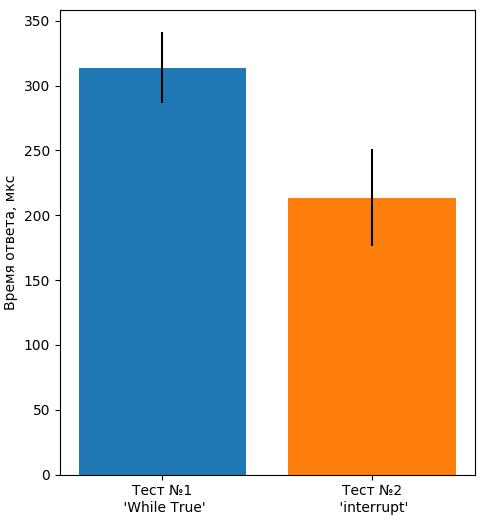
Здесь и на других осциллограммах «синий» сигнал — пин с кнопкой, «зелёный» ответный пин. При 15 повторениях получается такая картина:

В среднем время реакции около 310 микросекунд, максимальное — 356 мкс, не очень быстро, но для некоторых применений вполне приемлемо.
Тест №2
Ускорить стандартный код «из коробки» можно через обработку прерываний.
import machine
import time
o = machine.Pin(5, machine.Pin.OUT) #D1 out
i = machine.Pin(4, machine.Pin.IN) #D2 in
def f(_):
o.value(1)
time.sleep(0.1)
o.value(0)
i.irq(trigger=machine.Pin.IRQ_RISING, handler=f)
И картина получается следующая:
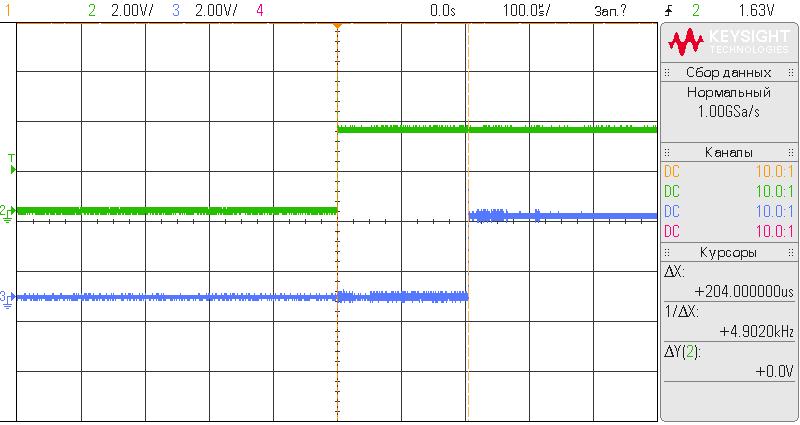
а максимальное время ответа 306 мкс.
Использование прерываний даёт прирост в скорости примерно в 20%, но при этом даёт довольно большой разброс во времени ответа.
Тест №3
Если полученных скоростей не хватает, то следующий шаг — воспользоваться конструкцией @micropython.native, что даёт возможность преобразования питоновкого кода в нативный машинный код. Но при этом есть некоторые ограничения.
Вариант кода:
import machine
import time
o = machine.Pin(5, machine.Pin.OUT) #D1 out
i = machine.Pin(4, machine.Pin.IN) #D2 in
@micropython.native
def f():
while 1:
if i.value():
o.value(1)
time.sleep(0.1)
o.value(0)
f()Типичная картина ответа на осциллограмме:

По сравнению с предыдущим способом ускорение почти в два раза:

Наибольшее время ответа 128 мкс.
Тест №4
Следующим этапом в поисках «быстрого» MicroPython — использование конструкции @micropython.viper и обращение непосредственно к регистрам микропроцессора (адреса регистров можно найти тут.
import time
@micropython.viper
def f():
O = ptr32(0x60000300) # регистр GPIO ESP8266
while 1:
s = ((O[6] & 0x10) >> 4) # считывание информации с 4 пина
if s:
O[1] = 0x20 #активизация 5 пина
time.sleep(0.1)
O[2] = 0x20 #деактивизация 5 пина
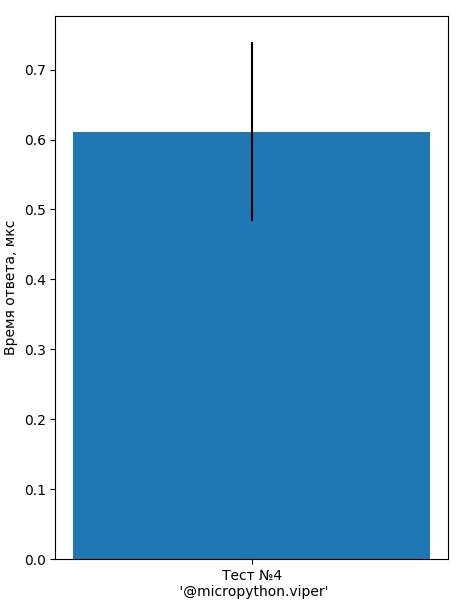
f()И как результат, отклик заметно ускорился:
Время отклика получается очень не большим и не поддаётся сравнению с другими способами (максимум 820 нс):
Если и этого мало, то можно воспользоваться ассемблерными вставками через декоратор @micropython.asm_thumb. При таком способе питона особо не остаётся (и теряются высокоуровневые преимущества Python) и если нужны более высокие скорости лучше использовать другие аппаратные средства, например FPGA (где Python тоже может пригодиться см. тут и тут).
UART
В случае если есть потребность передать много информации после некоторого события можно использовать последовательный интерфейс UART.
Возьму для примера два варианта реализации.
Первый через обработку прерываний:
import machine
i = machine.Pin(4, machine.Pin.IN) #D2 in
ua = machine.UART(1)
ua.init(1000000)
def f(_):
ua.write(b'\x01')
i.irq(trigger=machine.Pin.IRQ_RISING, handler=f)И осциллограмма реакции:
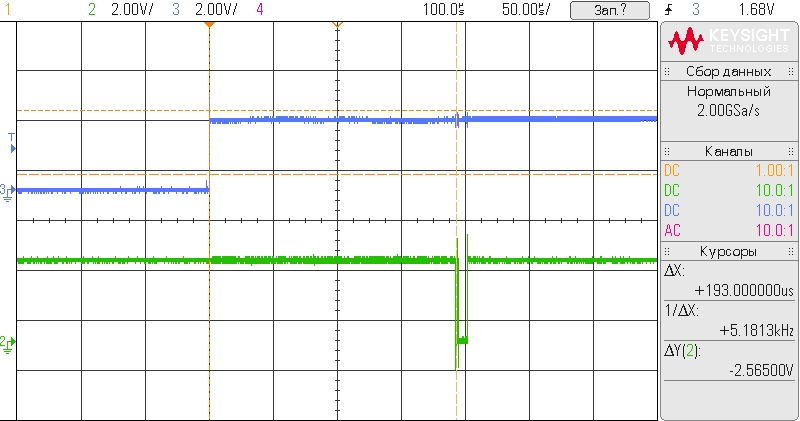
Максимальное время ответа 248 мкс.
И второй тест через viper:
import machine
import time
i = machine.Pin(4, machine.Pin.IN) #D2 in
ua = machine.UART(1)
ua.init(1000000)
@micropython.viper
def f():
O = ptr32(0x60000300)
while 1:
if ((O[6] & 0x10) >> 4):
ua.write(b'\x01')
time.sleep(0.1)
f()И осциллограмма при втором тесте:
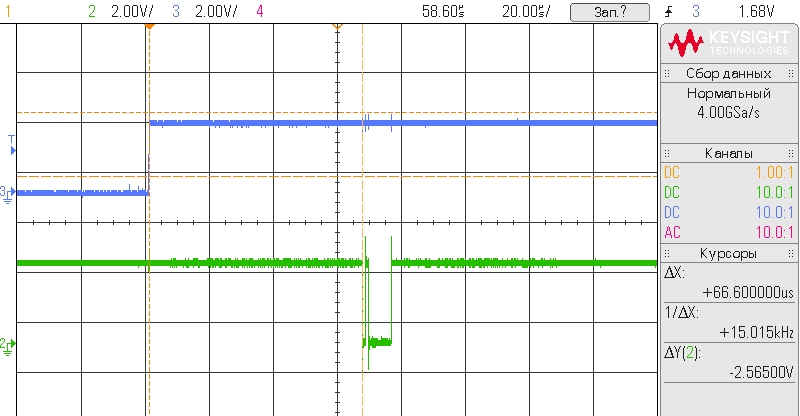
Максимальное время отклика при таком коде 71 мкс.
Среднее время реакции при двух тестах:
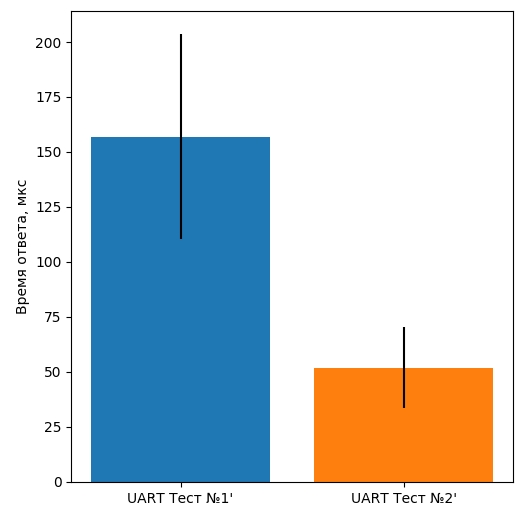
Ускорение реакции достигается за счёт более быстрого обнаружения входного воздействия во втором тесте.
Заключение
MicroPython позволяет при программировании микроконтроллеров пользоваться характерными для языков высокого уровня вещами (ООП, обработка исключений, list и dict comprahansions и пр.), а в случае необходимости заметно ускорить «классический» Python-код.
Комментарии (11)

GarryC
23.04.2019 12:38Обычно, когда мы измеряем время реакции, нас очень интересует, помимо среднего значения, максимальное, поскольку именно оно дает границы применимости. Хорошо бы дополнить этим параметром.
poznawatel
23.04.2019 20:39+1Огромное спасибо автору за свежие идеи! Используем micropython для управления промустановками и в 95% случаев его достаточно. Теперь применимость расширим.
alter_fritz Автор
23.04.2019 21:07+1Можете поделиться, какие микроконтроллеры с micropython используете и для каких конкретно целей
poznawatel
23.04.2019 22:30Пока используем pyboard 1.1 с офиц сайта и стандартный экран к нему. Интерфейс — сенсорный экран + аппаратные кнопки (родной экран очень маленький, палец закрывает элементы интерфейса). Управляем маломощными лабораторными и промышленными установками, на которых хватает шаговых/сервошаговых приводов. Ввод-вывод через Овен-овские блоки (Modbus через RS485).

SUNsung
24.04.2019 22:07-2ох сейчас меня обмажут минусами но я не могу промолчать.
извращаться на змеином с МК это как толкать машину руками и радоваться что она хорошо катится.
не говоря уже о том, что писать что либо на языке где все зависит от табуляции тот еще ссюр.
как язык костылей и поддержки, быстрой автоматизации и внедрения на сервере, для скриптов да идеально. для МК нет.
но меня унесло, это ESP. прекрасный чип от китайских друзей. с подобным количеством кода вы можете заставить тактировать выводной пин с хоть с частотой обработки процессора
про вшитые ШИМ-релизации вообще молчу.
Вы вызываете напрямую регистры и радуетесь ускорению процесса, закрывая глаза на то что в рамках какого-то комплексного кода а не просто оторванная от реальности моргалка пипном в производительности вы потеряете из-за тех петель что навернет интерпритатор переводя с микропитона на машинный.
если уж начали опускаться на низкий уровень и дергать регистры, то делайте это качественно и до конца.
А то, опять пример с машиной, вы завели машину но управляете ей с заднего сиденья шваброй. не спорю это возможно и при достаточны навыках даже заткнете за пояс любого посредственного автомобилиста, но самой печали ситуации это не убавит.
MrBoriska
25.04.2019 00:30На мой взгляд, если проводить аналогии с автомобилями… то использование MicroPython вместо С/C++/Asm, лучше представлять как использование некой продвинутой системы помощи водителю, а не швабры)
Безусловно, наличие продвинутых систем помощи водителю где-то ограничивает возможности автомобиля, но в ответственные моменты всегда можно находить компромисс путем его отключения и, как вы и заметили, полностью избавиться ухудшения производительности нельзя, как и в современных автомобилях полностью системы помощи отключить бывает проблематично.
Прогресс не стоит на месте, и производительность таких решений часто бывает более чем приемлема, особенно с учетом гораздо большей скорости разработки программ на питоне чем на С/C++/Asm.

webself
25.04.2019 06:46+1Про толкать машину уже написали вам.
писать что либо на языке где все зависит от табуляции тот еще ссюр
А на это скажу, что примерно так же относился к табуляциям питона, пока сам не начал писать на нем. Сейчас, спустя годы, имею стойкое мнение, что это одна из самых ценных находок человечества. Не писать begin/end-ы, а заменить их отступами.
webself
25.04.2019 06:43alter_fritz а вы не могли бы дополнить статью аналогичными тестами на Lua/NodeMCU? Там такого количества возможностей для оптимизации нет. Только просто код и скомпилированный код. Но вроде как код луа гораздо ближе к машинному, интересно, как его быстродействие с uPython будет конкурировать.
trolley813
По-моему, здесь все-таки уместнее писать «микроконтроллер», а не «микропроцессор» (как-никак, у описываемых в статье штуковин и внешние интерфейсы есть, чего у процессоров нет). А в широком смысле к микропроцессорам и CPU относятся.
alter_fritz Автор
Согласен, исправил. Спасибо