

Исследователи из группы робототехники в Цюрихском университете и ETH Zurich в сотрудничестве с Intel разработали метод обучения нейронной сети, который позволяет автономному квадрокоптеру выполнять экстремальные акробатические маневры с помощью бортовых датчиков и вычислений. Дрон смог выполнять трюки, недоступные даже при управлении опытным пилотом-человеком.
Квадрокоптер может выполнять акробатические трюки на открытом воздухе без внешней камеры или системы отслеживания движения. При этом обучение ИИ выполняется в симуляции, без необходимости в дополнительном этапе перехода к реальному миру.
Чтобы обеспечить такой переход, при обучении нейронной сети в симуляции используется экспертный контроллер, который обучает «ученический контроллер», обладающий менее совершенными знаниями. Это необходимо для адаптации к новым данным в реальной ситуации.
Исследователи использовали среду моделирования Gazebo, немного измененную под физику квадрокоптера.
Кастомный квадрокоптер весом 1,5 кг работал на плате NVIDIA Jetson TX2 и Intel RealSense T265, с модулем двойной камеры «рыбий глаз», оптимизированный для V-SLAM.
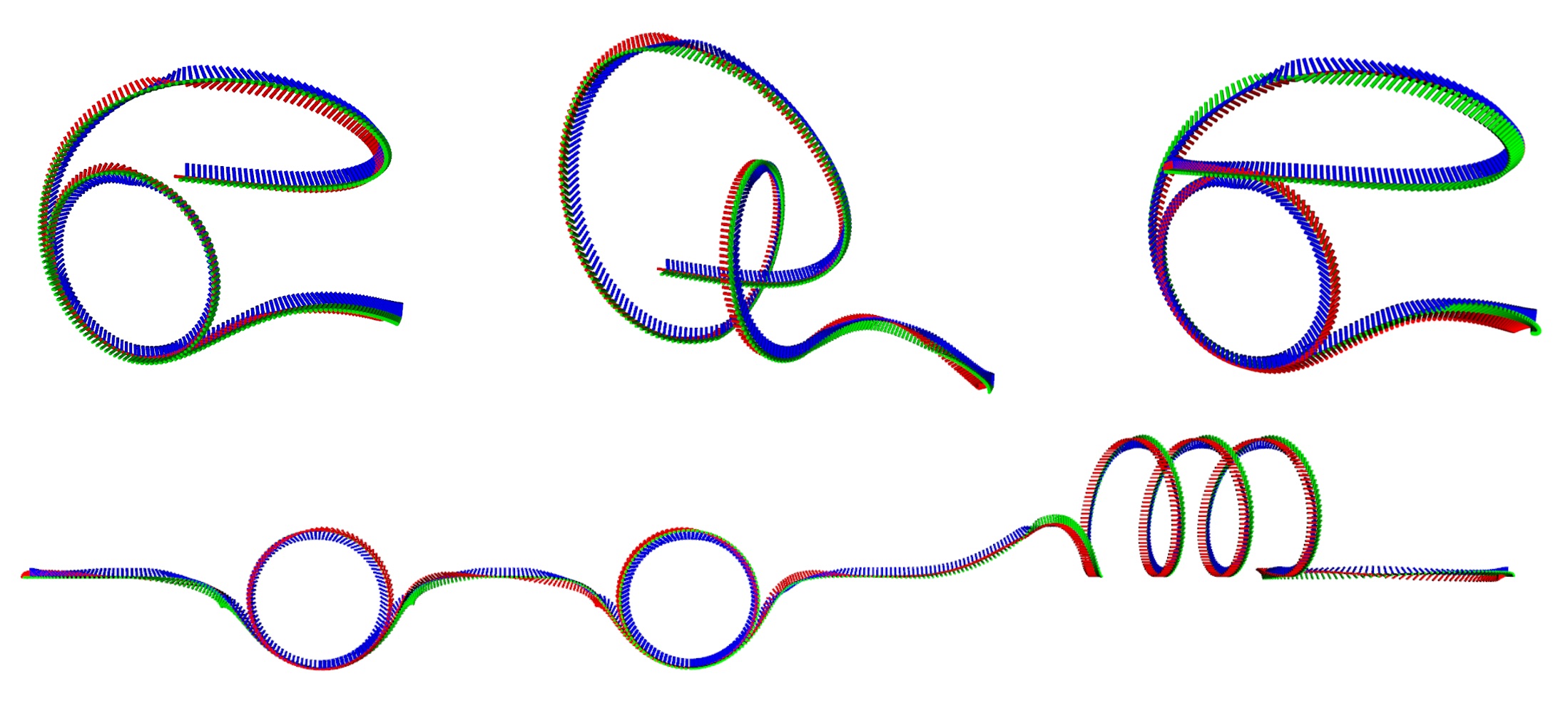
Его обучили трем маневрам и их комбинациям. Спустя несколько часов обучения в симуляции дрон смог выполнить все эти трюки и даже целые их последовательности.
По словам разработчиков, на данный момент основным минусом технологии является продолжительность маневра. Длительность одного трюка ограничена 20 секундами.
Сейчас авторы идеи работают над системой полета в пространстве с препятствиями. Кроме того, они задумались над разработкой системы маневренных полетов в открытом космосе.
Исходный код проекта есть на GitHub.
См. также:
Alex_ME
Без сравнения с классическими методами управления эта работа не полная. Мат. моделей коптеров разной степени точности немало.