
Как летает квадрокоптер?
Чтобы понимать суть технических решений, разберемся немного как вообще квадрокоптер летает. По сути, квадрокоптер — это неустойчивая система. Если взять 4 мотора, и просто подключить их к батарейке, квадрокоптер никуда не полетит, он просто перевернется т.к. сила тяги моторов никогда не будет идентичной. И тут вступает в действие электроника. На борту квадрокоптера есть центральная «плата управления», ключевой частью которой является блок датчиков. В простейшем случае, это трехосевой гироскоп. Микроконтроллер постоянно считывает данные с гироскопов, и как только гироскоп «чувствует» наклон по какой-либо оси, контроллер дает соответствующему двигателю команду чуть-чуть увеличить или уменьшить обороты, чтобы компенсировать наклон. В общем-то и вся логика — за исключением кучи всего (ПИД-регуляторов, теории управления, фильтров Калмана), ничего сложного тут нет (шутка). Ну а для пользователя все действительно прозрачно. Никаких движущихся частей кроме моторов, в квадрокоптере нет, все управление происходит исключительно изменением вращения оборотов моторов (с поворотами аналогично — изменяем скорости вращения, получаем вращающий момент). А теперь вернемся к истории.
Осторожно, траффик.
MikroKopter
Легендарная немецкая компания, благодаря инженерам которой в 2006 году появился первый аппарат. Контроллер имел на борту процессор Atmega644 c 4Кбайт памяти и частотой до 20МГц, 3 гироскопа по каждой из осей, акселерометр (для возможности горизонтального полета) и барометр для удержания высоты (точность барометра MPX4115A около 1м). Позже появились дополнительные модули, например GPS для удержания позиции.
Сейчас в youtube можно найти видео, как примерно все это летало (2007 год).
В целом система оказалась весьма удачной. Их продукция никогда не была дешевой, ценник начинался где-то от 1500Евро. Фирма существует и сейчас, они производят профессиональные аппараты, ценовая категория соответствующая. И еще один важный момент — первоначально, создатели Микрокоптер сделали исходный код открытым. Разумеется, уже в скором времени стали появляться различные клоны (в том числе производимые и в РФ), это конечно негативно сказалось на продажах, и код потом закрыли. Но все-таки, думаю это послужило большим толчком к созданию различного вида мультикоптеров.
У нас MikroKopter не был популярен из-за цены, и владельцев было не так уж много. Однако толчок мировому сообществу был дан, и различные системы стали появляться.
KaptainKuk
Одна из самых простых систем, выпускаемых (в различных версиях) с 2010 года и до сих пор. Плата управления имеет только 3 гироскопа, для регулировки параметров используются обычные переменные резисторы.
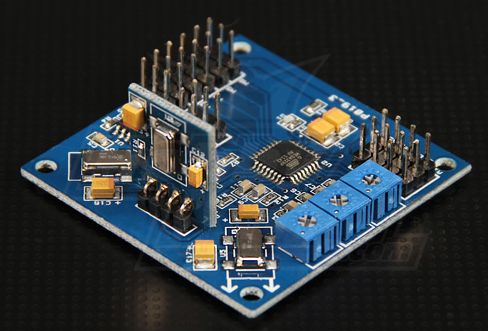
(Фото с сайта Hobbyking.com)
Такая плата сейчас стоит всего около 15$, как можно видеть, на борту кроме гироскопов и слабого процессора, в общем-то ничего и нет. Прошивки в исходных кодах для KK свободно доступны в Интернете, желающие могут скачать их, набрав в поиске гугла имя файла «kk2_1V1.zip» (размер всего 90Кб). Наверное, это первая и последняя версия прошивки какого-либо коптера, написанная на ассемблере.
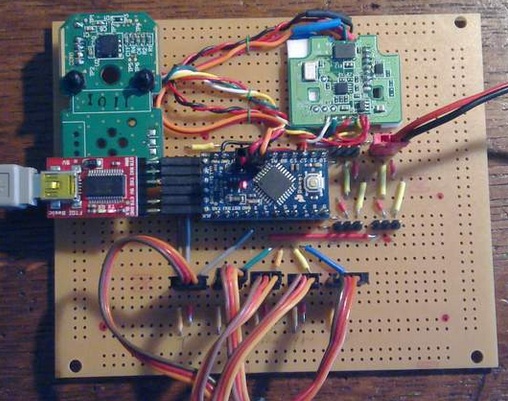
MultiWii
Следующей вехой в развитии коптеров стала система MultiWii. Название пошло от игрового манипулятора Nintendo Wii и Wii Nunchuk, которые умельцы разбирали, и выпиливали оттуда плату с датчиками. В качестве центрального процессора использовалась Arduino Nano.
Внешний вид платы получался примерно такой (фото с сайта rcgroups, 2010 год):
Впрочем, за несколько лет система эволюционировала, и последние платы (они продаются и сейчас, цена вопроса 20-30$) выглядят где-то так:

(фото с сайта Hobbyking.com)
Последние версии MultiWii имеют вполне неплохие датчики, умеют зависать в точке по GPS, удерживать высоту и возвращаться домой. Т.к. Multiwii был написан для Arduino, все платы так и остались Arduino-совместимыми, исходный код можно скачать на Github. Одним из недостатков MultiWii является слабый процессор, что ограничивает вычислительные возможности алгоритмов, позже стали появляться клоны на STM32, однако погоды они не сделали, т.к. в плане «железа» любой квадрокоптер достаточно прост, 95% сложности заключается именно в коде. В то же время, я уверен что именно исходники MultiWii стали основой всех сегодняшних коммерческих систем.
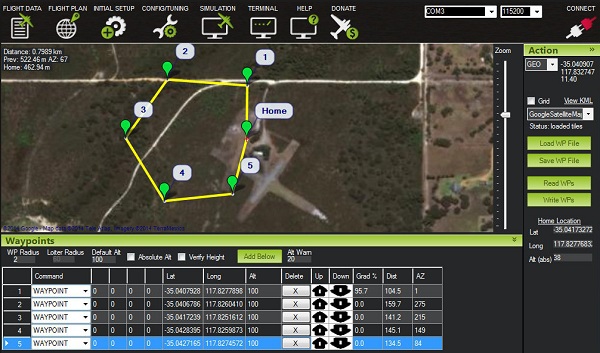
ArduCopter
Еще одна система, основанная на Arduino, пошла дальше всех. Сейчас это система с возможностью программируемого полета по точкам, поддержкой радиомодемов и передачи телеметрии, хранения различных логов и пр.
Их софт выглядит примерно так:
Платы эволюционировали от таких:
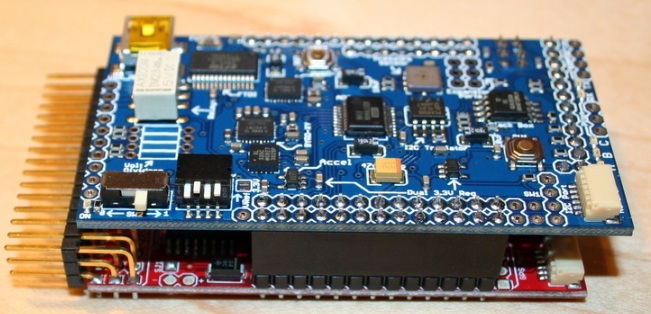
до таких

Платы продаются и сейчас, цена вопроса от 50$ (за клоны) до 250$ за оригинальные версии. Исходные коды Ardupilot так же полностью доступны на github, и судя по количеству коммитов, проект активно развивается. Эта система по возможностям не уступает профессиональным аппаратам, качество полета можно посмотреть на видео:
Здесь все классно, за исключением одного «но» — это Open Source, со всеми вытекающими последствиями. Система открытая, дорабатывается энтузиастами, и никто ничего не гарантирует, в том числе и отсутствия багов в софте. Если квадрокоптер упадет на чей-то BMW, жаловаться будет некому.
Бесколлекторные подвесы (brushless gimbal)
Параллельно с квадрокоптерами, развивалась еще одна очень интересная технология — бесколлекторный подвес для фото/видео камеры. Это отдельная плата со своими датчиками, которая удерживает камеру в нужном положении за счет двух моторов, компенсируя развороты по соответствующим осям. Их разрабатывал наш соотечественник, как работает подвес, можно видеть на видео (2013й год).
Видно что коптер качается, а ось камеры нет.
Сейчас этим уже никого не удивить, а тогда это был настоящий прорыв в качестве видеосъемки.
Коммерческие системы
Про них писать не так интересно, т.к. принцип здесь простой, «заплати и лети». Первым был вышеупомянутый MicroKopter, следующей (и не очень удачной) попыткой был XAircraft, в бюджетном секторе были популярны аппараты марки Gaui (это был первый бюджетный аппарат ценой около 400$ за готовый коптер). И наконец, самой успешной компанией является DJI, про которую не писал только ленивый, так что повторяться здесь смысла нет. Они вышли на рынок с контроллерами DJI Naza (ценой 200-400$, с возможностью удержания позиции, возврата домой), была отдельная профессиональная серия DJI Wookong (ценой около 1000$ и большей стабильностью полета). Наконец, DJI вышла на рынок устройств готовых к полету (RTF, Ready To Fly), ну про них уже все знают.
И последние видео.
Первый бюджетный квадрокоптер Gaui 330. Цена вопроса 400$, 2010 год, никаких доп.функций.
Dji Naza v2, цена вопроса те же 400$, возможность удержания позиции, возврата домой, полета любой стороной к пилоту (режим carefree).
Dji Phantom 3 — со встроенным подвесом камеры, управлением со смартфона и прочими плюшками.
На этом пока все, sorry за большое количество видео, но без них никак, иначе было бы неинтересно. Посмотрим что будет дальше, лет через 5…
Комментарии (59)

PlazmX
15.09.2015 14:32+6Спасибо за статью! Интересно!
А кому то будет интересна стать о гоночных квадрокоптерах 250го класса? Личный опыт, грабли, взлёты и падения т.сказать)DmitrySpb79
15.09.2015 14:51Напишите, интересно. У меня тоже есть 250й на naze32, хотел поставить на него FPV но руки так и не дошли.

rogrom
15.09.2015 17:37если можно, то со всеми ценами плиз, потому что для меня это решающий фактор на данный момент…

Negor
15.09.2015 18:07Я бы хотел, выбрал его себе как первый, но из деталей купил только аккум и зарядку) Так что с удовольствием переёму опыт

AlexeyStn
15.09.2015 20:59Рассказывайте! 250-е коптеры – направление новое, активно развивающееся. Статей про них совсем мало.

newkamikaze
15.09.2015 16:46Отличная статья, спасибо. Теперь можно писать обзор самых популярных полётных контроллеров.
Небольшое замечание:
Это отдельная плата со своими датчиками, которая удерживает камеру в нужном положении за счет двух моторов, компенсируя развороты по соответствующим осям.
Моторов может быть от одного до трёх, в зависимости от того, по скольким осям стабилизация.DmitrySpb79
16.09.2015 11:59Теперь можно писать обзор самых популярных полётных контроллеров.
Если мне их кто-то предоставит для теста, то могу написать :) Покупать dji phantom за свой счет при теперяшнем курсе доллара желания как-то нет :) Вообще, когда квадрокоптеры почти окончательно ушли из ниши DIY в раздел коммерции (заплати и лети, даже собирать не надо), стало уже не так интересно.newkamikaze
16.09.2015 16:16Статью я имел в виду вроде гида. Какой выбирать для чего. Я когда начинал собирать свой 250-й долго мялся, какой полётный контроллер брать. Кстати, статью по его постройке со всеми ссылками и ценами (как выше просили) пишу уже почти 3 месяца, осталось немного добить.

father_gorry
15.09.2015 17:00+6Соотечественника зовут Алексей Москаленко, он из Краснодара.
Страна должна знать своих героев.
Сейчас благодаря его разработкам идет подлинная революция не только в коптерных съемках, но и во всей индустрии кинематографии. Тяжелые стедикамы и прочие подвесы заменяются на легкие и простые БК-подвесы, это существенно меняет работу оператора, а режиссерам дает массу новых возможностей.
4utep
15.09.2015 19:03ну как бы не совсем
если говорить безотносительно размеров подвеса то первыми тут были скорее всего украинцы из фильмотехники со своими flighthead на моторах прямого привода
если говорить про мелкие подвесы (для камер до 10 кг) то тут первыми были DJI с подвесами Zenmuse и именно они дали толчок для всех остальных
потом практически в одно время с одной стороны — Леша Москаленко со своим дешевым решением, которое открыло мир кустарных подвесов для моделистов
и с другой стороны — FreeFly, которые первыми пронюхали тему альтернативы традиционным стедикамам и выпустили Movi M10, который до сих пор является стандартом де-факто для проф применения
ну а дальше пошло поехало, и даже DJI со своим Ronin зашел на рынок стабилизаторов для операторских задачfather_gorry
15.09.2015 21:31Сами же ниже пишете, что именно Алексей вывел технологию в массы.
Да, Zenmuse был примерно на год раньше, но за безумные деньги — что-то около 5000 $. Без альтернативы от Москаленко DJI так и остались бы в топ-сегменте, а это никакая не революция.4utep
16.09.2015 12:35вот я и пишу что вы правы, но лишь от части)
индустрия кинематографии != массы
там революция началась бы и после одних лишь freefly, которые как раз и предложили таскать бк подвес в руках
да еще и с ценой чугунного моста, но индустрию такими ценниками напугать сложно)
цены бы так или иначе пошли в низ, но выход на сцену Леши значительно ускорил процессы и за это ему, конечно, спасибо)

ProLimit
16.09.2015 00:38+9Абсолютно верное замечание, я никогда не претендовал на первенство, просто показал, что эта технология достаточно проста, чтобы повторить ее «на коленке», и начал развивать контроллер, на котором любой мог бы сделать БК подвес самостоятельно и за вменяемые деньги. Постараюсь описать кратко эту историю.
На мультикоптерах, конечно, уже были подвесы, но все они работали на хоббийных сервоприводах. Это позволяло сделать простейший подвес за 30 минут, соединив 2 сервопривода и подключив их к полетному контроллеру (почти все они имели выходы для 2-х осевой стабилизации). Но качество стабилизации было ужасным. Были и более дорогие, и даже «профессиональные» решения, где применялась масса ухищрений, стоили они дорого, но в основе были по прежнему те же сервоприводы, и свойственные им принципиальные проблемы. В то время я тоже собирал свои мультикоптеры на MultiWii, и пытался добиться от сервоподвеса хорошего качества, но безуспешно.
Потом DJI выпустили свой Zenmuse, и это был настоящий прорыв в качестве стабилизации. Тогда я не знал ничего об его устройстве кроме того, что там не сервоприводы, а какой то другой принцип, и по доступным в интернете фоторгафиям начал догадываться о принципе его работы. Сейчас этот принцип кажется очевидным, но тогда это было настоящее откровение, и не было абсолютно никакой информации или наработок в open source. Пришлось перечитать кучу литературы, изучить, что такое 3-х фазный синхронный электродвигатель, освоить программирование для Atmega8 (именно на нем работали доступные тогда драйвера БК-моторов, называемые ESC) и перепрограммировать ESC, освоить перемотку моторов, разобраться с алгоритмами работы гиро-сенсоров (спасибо Multiwii, я к тому времени познакомился с программированием микропроцессоров и мог по мелочи дописать что-то к этой прошивке). И 17 августа 2012 года система в первый раз заработала как надо (запомнил, потому что есть видео с камеры www.youtube.com/watch?v=0HcMLbkywQA). Стабилизация была не очень, ШИМ 8 кГц ужасно пищал (atmega8 не могла сгенерить программный ШИМ на три фазы выше частотой), но по сравнению с сервами это было нечто, и самое главное — это можно было собрать на коленке из разного хлама (первые моторы были от старых CD-приводов)!
Потом была более-менее рабочая версия на процессоре Atmega328 (это был самый доступный процессор для «чайников» в электронике благодаря Arduino), и видя огромный спрос, принято решение о коммерциализации проекта. Контроллеры на нем и сейчас продаются и нормально работают. Потом был мучительный и долгий переход на Stm32 (заработанные к тому времение на проекте деньги позволили нанять программиста, который адаптировал существующий код, но все равно пришлось братья за дело серьезно и осваивать STM32, embedded-программирование, схемотехнику и много чего еще, чтобы продолжать развивать проект).
Чуть ранее FreeFly анонсировала Movi, на насколько я помню, официальный релиз был сильно задержан, а цены просто астрономические, так что он не сделал революции. DJI после успешного Z15 взял длинную паузу, также совершенно непонятно по каким причинам, но они 3 года не выпускали новых версий, а ведь Z15 поддерживал только 2 любительские камеры!
Сразу после моих публикаций появились open-source проекты и проекты с закрытыми исходниками. Open-source проекты заглохли примерно на уровне моей 8-битной версии, и сейчас я не знаю ни одного серьезного. Есть сильные «народные» проекты с закрытыми исходниками, самый сильный на мой взгляд — Storm32.
Конечно, стабилизаторы на прямом приводе изобрел далеко не DJI, были и головки от фильмотехника, если уж совсем глубоко копать — были! аналоговые! системы на таком же принципе в военной технике.father_gorry
16.09.2015 08:31Первенство и революция — разные вещи. Не обязательно автор первого изобретения добивается успеха, ведь доработок еще много. Вы проделали огромную творческую работу, сделав технологию на несколько порядков доступнее, и это было заметно во всем мире. Чем не революция? Обычно такими вещами должны заниматься крупные компании, вроде тех же DJI в нашем случае, но они не смогли.
Кстати, чем плохи опенсорсные проекты? На хороших моторах они обеспечивают попиксельную точность в разрешении до 2.7к (а может и 4к — не тестировал), и этого вполне достаточно. Одна разве только претензия — меняется наклон горизонта при поворотах по yaw, но не всегда и не везде.
ProLimit
16.09.2015 15:12А про какой проект речь? Мгновенная точность стабилизации на мой взгляд не самое важное, да и достичь ее не так сложно. А отклонения горизонта присущи всем подобным стабилизаторам, в том числе и моему — недорогие MEMS-сенсоры требуют идеальной калибровки и ее уточнения при смене условий, капризны в условиях вибраций, и нужна информация от полентника. Калибровку многие забывают или не придают большого значения, полетники не имеют единого интерфейса, хотя подвижки тут уже есть. В этом плане проприетарные стабилизаторы DJI, котрые работают только с их назой, имеют преимущество.
father_gorry
17.09.2015 18:37Речь о немцах и конечно, о SimpleBGC 8-bit. 32bit пока не заказывали.
У обоих попиксельно достаточная стабилизация. Естественно, при полной изоляции дрожания — а ее в любом случае надо делать, поскольку rolling shutter и даже простое смазывание в передней плоскости никто не отменял.
Эффект смещения горизонта, о котором я говорю, происходит не от дрожания, а при повороте по yaw: крутим коптер вправо или влево — горизонт зависимо кренится на 20-30 градусов в противоположную сторону. Возвращаем нос обратно — крен исчезает.ProLimit
17.09.2015 21:14Контроллеры 8 бит заведомо проигрывает в точности 32 битам хотя бы потому, что разрядность ШИМ там в 8 раз ниже. Но когда я говорил про развитие, имел ввиду не только точность стабилизаци, но и разные функции, которые требуются разработчикам подвесов, гибкость в конфигурации, работа в необычных положениях и т.д. За 2 года после 8-битной версии мой проект усложнился как минимум на 80% за счет этой обвязки.
Завал горизонта — да, знакомо, как правило лечится точной калибровкой сенсоров.father_gorry
21.09.2015 10:55Похоже, завал горизонта — более фундаментальная бяка. Позавчера наблюдали его на Инспайре, который калибруется при каждом включении.
Кстати, у DJI все моторы снабжены датчиками, по сути это энкодеры. Так что сравнивать Вашу разработку и Zenmuse некорректно, Вы точно первый.

Raegdan
15.09.2015 18:42Меня всегда интересовало: а почему у квадрокоптеров не бывает механического датчика положения? Гирька, висящая на жёстком отвесе из углепластика. Усилие на этот отвес измеряется в направлениях на моторы. Если в сторону какого-то мотора появилось усилие — разгоняем его и тормозим противоположный.
DmitrySpb79
15.09.2015 19:15Это получится простейший дискретный акселерометр :) Я лично не видел, но по отзывам, в самых первых китайских игрушках примерно такие были. Сейчас это бесмысленно, т.к. современный MEMS-акселерометр и быстрее и точнее.
father_gorry
15.09.2015 21:26+1Да, в общем, MEMS, МикроЭлектроМеханическое устройство, и есть что-то вроде гирьки на отвесе.
4utep
15.09.2015 18:49+3как-то очень неполно и местами некорректно
например, незаслуженно обошли стороной многострадальный openpilot, который прямо или косвенно внес множество новаторских идей в мир хобби контроллеров
dji начинали с проф решений: в самом начале у них был контроллер для вертолетов, потом сделали вуконг, потом пошли в массы — наза, фантом итд
и подвесы на моторах прямого привода первые в мир коптеров вывели dji со своим zenmuse
что конечно не уменьшает заслуг Леши — он вывел такие подвесы в самый массовый сегмент и так же благодаря ему появились опенсорс проекты вроде мартинеза, стормбгц и прочихDmitrySpb79
15.09.2015 19:26Да, можно много моделей вспомнить, от Openpilot или Rabbit-a (практически первый клон Multiwii на STM) до Fyetech или даже Autoquad (интересная была штука), я постарался выделить наиболее ключевые.
Openpilot был широко известен в узком кругу :) любителей поделать всякие петли/бочки, но как популярный контроллер имхо он так и не «взлетел» (со второй версией они сильно задержались вроде, когда она стала уже и не нужна).4utep
15.09.2015 19:38+1ну как бы сейчас если глянуть статистику по 250 размеру то в подавляющем большинстве на верхних строчках будет cc3d или новый revo mini
я уж не говорю про то что они были чуть ли не первые кто сделал контроллер на 32bit мк и они же, по-сути, ввели моду на формфактор плат 36x36мм
у них проблемы не в задержках — revo до сих пор актуален, а в доступности железа
это большая проблема в том числе из-за которой, как я понял, OP распадался уже два раза — сначала форкнулся TauLabs, а теперь вот совсем недавно — LibrePilot
зы. причислять openpilot в один ряд с раббитом это конечно сильно

darkfrei
15.09.2015 23:39Почему не гироскопы называют гироскопами?
AlexeyStn
16.09.2015 11:47Как их нужно называть?
darkfrei
16.09.2015 13:41Не гироскопы нужно называть своими именами. «Гиро-» обозначает вращение.
Никаких движущихся частей кроме моторов, в квадрокоптере нет
А вот так выглядят гироскопы:

Скорее всего имелись ввиду датчики ускорений, угловых ускорений и датчики углового положения.DmitrySpb79
16.09.2015 13:46+1Ist Grammar nazi hier? :)
Читаем мануал в первоисточнике:
InvenSense Inc.: 6-Axis Gyro+Accel: MPU-6000
3-axis gyroscope, 3-axis accelerometer in a 4x4 package.
The MPU-6000 is the world’s first 6-axis I?C MotionTracking device designed for the low power, low cost, and high performance requirements of smartphones, tablets and wearable sensors.darkfrei
16.09.2015 14:08The MPU-6000 is the world’s first 6-axis I?C MotionTracking device designed for the low power, low cost, and high performance requirements of smartphones, tablets and wearable sensors.
Тут не сказано что это гироскоп! Это «элемент отслеживания перемещений». При этом MotionTracking — торговая марка.
Выдержка из руководства:
Digital-output X-, Y-, and Z-Axis angular rate sensors (gyroscopes) with a user-programmable fullscale
range of ±250, ±500, ±1000, and ±2000°/sec
Краткий гуглинг по «angular rate sensors» подсказывает что гироскопами они не являются, а называются так только во благо маркетинга и упрощения, вплоть до подмены понятий.DmitrySpb79
16.09.2015 16:01+2Разумеется, в электронных датчиках ничего физически не вращается, однако словосочетание MEMS-гироскоп давно стало устойчивым и повсеместно употребимым.
Да и нет никакой подмены понятий, т.к. суть устройства осталась та же.darkfrei
16.09.2015 16:22Суть та же, но название указывает не на суть, а на природу работы устройства.
Странно что не сделали какой-нибудь угловой виброскоп, если новые датчики имеют вибрационную природу работы.
ProLimit
16.09.2015 00:53Ardupilot сейчас активно развивается, они получили грант от Linux Foundation (proof) и влились в Dronecode, прешли на новое мощное железо PX4. Я бы рассматривал их как самый перспективный open-source полетник. Хотя указанные в статье проблемы ему действительно присущи, народ жалуется на баги, а для полетника любая мелочь критична. И дело не только в том, что не с кого спросить (в закрытых полетниках то же самое), а в самом принципе — очень сложно такой огромный проект с большим числом коммитеров поддерживать свободным от багов. «Today more than 1,200 developers are working on Dronecode projects with more than 150 code commits a day on some projects». Вполне возможно также, что переходные процессы после смены железа еще не все прошли.
DmitrySpb79
16.09.2015 00:59Да, по моим ощущениям фичи в Arducopter добавляются быстрее чем тестируются :) Еще система стала очень большой и раздутой, а документация не всегда успевает за изменениями. В общем, сейчас это скорее игрушка для гиков, жалоб на форумах я слышал довольно много, и для проф.задач я бы брал что-то более стабильное и надежное.
Но это имхо, может и ошибаюсь, уже более полугода за их новостями не следил.father_gorry
16.09.2015 09:25Багов действительно много, но кто мешает вам загрузить самую стабильную по отзывам версию?
DmitrySpb79
16.09.2015 11:56Потому что это методически неправильный путь — хочется иметь надежную систему, а не бороться с багами. Та же Naza Lite стоит сейчас весьма дешево, а летает вполне прилично.
Если же нужны специфические фичи типа полета по точкам, контроля телеметрии по радиомодему и т.д., тогда да, вариантов больше и нет (среди дешевых).4utep
16.09.2015 12:06почему же, openpilot — полная противоположность арду:
— багов почти нет, тестируют оч хорошо
— ph ah есть и работают во всех форках (OP, LP, TL)
— железо, наконец, становится реально доступно и достаточно дешево
даже полет по точкам есть, но там вроде пока не оч все просто в плане настройки
обратная сторона подобной методологии — гораздо меньшее колличество фич и в общем гораздо более медленные темпы развития
но это их осознанный выбор вроде какDmitrySpb79
16.09.2015 12:09Да, возможно, давно не смотрел в сторону openpilot. У меня была самая первая версия, где даже барометра не было (не знаю поддерживается ли она сейчас).
Подход минимизации и аккуратности добавления фич — в целом правильный имхо, т.к. 1001 фича в квадрокоптере далеко не всегда и нужны.4utep
16.09.2015 12:26первая версия это CopterControl
вторая — СС3D, поддерживается до сих пор
потом сделали Atom — тот же cc3d но в два раза меньше размером
потом сделали Revo — поддержка есть, но платы официально выпускать прекратили из-за дороговизны (исходники выложили и китайцы их уже освоили вроде как)
почти одновременно с выходом Revo произошел первый форк — TauLabs, у них есть несколько доступных плат Quanton, Sparky2
сейчас сделали Revo Nano и опять форк — LibrePilot (эти чисто софтовые, им надоело бороться изнутри с консервативным подходом в проекте, они хотят дружить со всеми и быть более открытыми)
в краце: на cc3d (продается на ХК за 30$) можно поставить OP, TL, LP
revo можно найти либо с рук либо у китайцев — OP, LP
аналоги рево — quanton, sparky2 пока только TL, но в скоре я думаю на них запустят и LP
revo nano (доступность традиционно подхрамывает) — поддерживается OP и в самое короткое время LP
4utep
16.09.2015 11:58если быть совсем точным то ardupilot давно находится под крылом 3DR, и если не ошибаюсь у них в штате есть разрабы которые поддерживают код
их же усилиями был создан Dronecode, в который как раз и ввели ardupilot как основной проект и сделано это было, как мне кажестся, в большей степени для пиара и раскручивания платформы, особенно учитывая тот факт, что 3DR активно пытаются навязать конкуренцию DJ, плюс деньги инвесторов надо отрабатывать (а там уже вроде больше $100мио в них влили)
активно развивается, да… спасибо порой примитивному коду и архитектуре и высокой доступности железа)
обратная сторона, как ты сам сказал — куча багов и малопротестированных фич
blind_oracle
Спасибо за обзор! Многим будет полезен.
Но:
К сожалению, опенсурс это или нет — не имеет никакого значения. Никто не будет нести ответственность за баги в коде коммерческих продуктов — сколько разных DJI (фантомов и Naza) «улетало в Китай» и падало за горизонтом — не счесть. Кто-то за это понёс ответственность или, хотя бы, компенсировал потери?
DmitrySpb79
Да, разумеется. Любой квадрокоптер покупается и запускается на свой страх и риск.
Что касается падений/улетов, то как и в большой авиации, 95% имхо — это человеческий фактор. Не затянули винт, не прочитали инструкцию с описанием режимов полета, не настроили компас, не дождались инициализации GPS, не настроили failsafe, и так далее. Например, неоткалиброванный компас — это 100% улет в Китай при первой же попытке включения GPS, т.к. вектор направления система берет из магнитного компаса, а без калибровки он покажет что угодно (впрочем я не знаю, может последние DJI продаются уже откалиброванными, хз).
blind_oracle
Я говорю именно про баги в коде. В случае c DJI имеет место именно программный глюк (или программно-аппаратный, тут трудно сказать), который случался у многих с похожими симптомами.
vasimv
Могли бы просто сделать приостановку режима возвращения при постоянном возрастании дистанции (вместо сокращения) и автокалибровку компаса (повернуться вокруг оси он может).
blind_oracle
Да они много чего могли бы, но прошивки для Naza V2 не обновляются уже пару лет.
leviathan
Да ладно, пару лет. Прошивка 4.04 вышла 12 июня 2015, 4.06 — 17 июля 2015: download.dji-innovations.com/downloads/nazam-v2/en/NM_release_notes_en.pdf
blind_oracle
Да, наконец обновили, my fault.
Какое-то время назад смотрел (летом) — последняя версия 4.02, которая на моём коптере стоит, была от 2013-10-25.
father_gorry
Мы скоро выводим стартап с коптером без страха и риска — на нем будет не страшно падать, поскольку максимум что разбивается — это пропеллеры. Рама, камера, БК-подвес, моторы — защищены от удара, а электроника — от воды. Если попадает в человека, тот тоже страдает меньше. Защита от улетания уже есть во многих полетных контроллерах, она либо аварийно сажает, либо просто роняет машину — но теперь это не страшно:)
Grox
А если он упадёт на автомобиль или чью-то голову, то они тоже уцелеют?
father_gorry
По сравнению с другими — намного больше шансов, что уцелеют.
father_gorry
И да, есть решение, которое дает почти полную сохранность человека или его автомобиля. Но его нужно аккуратно пилотировать, поэтому для рынка пойдет первый вариант, с отличной самовыживаемостью и неплохой безопасностью для окружающих, лучше чем у любого другого дрона сопоставимой массы и размера.
pavlick
все зависит от дури в голове и моторах, практически все регули сейчас имеют функцию автостопа, мягкого или жесткого — как только регулятор понимает, что винт встретил препятствие, сразу останавливает мотор. Но, как мы знаем, винт мгновенно остановиться не может. Мне вот при включенном автостопе в регулях коптер с винтами 1755 за время остановки успел подарить 8 швов.
father_gorry
У нас будет вариант с хорошей защитой от пропеллеров для начинающих — не та ломкая пластмасса, что сейчас продается. Ну и ловить драгоценный коптер, рискуя получить шрамы, будет не нужно)
Raegdan
Именно. Из мириад поставленных мной в жизни программ не припомню ни одной ЕУЛы — хоть проприетарной, хоть свободной — в которой посреди красиво отформатированного текста не красовалась бы набранная традиционным капсом традиционная копипаста про «no responsibility» и «provided as-is».
Нет — повязать вендора ответственностью за его говнокод в принципе можно. Отдельным приложением к ЕУЛе, подписываемым перед закупкой, и за очень отдельные бабки. Увы, тег <b> в данном случае не передаст всей серьёзности этого слова. Потому что титанам разработки софта очень трудно сделать предложение, от которого не было бы проще отказаться и просто продать ещё 100500 обычных лицензий.
blind_oracle
Да, это похоже на ситуацию с SLA во всяком ИТ (хостинги и т.п.): хочешь гарантированного сервиса в N мегабит и 99.XXX% доступности — плати X100 денег.
Я думаю (скорее — надеюсь), что когда зависимость цивилизации от ПО достингет критической отметки — всё же введут какие-либо законы, регулирующие качество продаваемого ПО. Иначе можно и до всемирного коллапса доиграться…
Raegdan
Да, про мегабиты вообще отдельная песня. Почему у меня 70 мегабит за 700 рублей, а на работе — 10 мегабит за 10 тысяч? Потому что на работе их действительно 10, а у меня — до 70, и провайдер не виноват, что весь подъезд включил торренты и на чердаке подавились китайские свичи.
Areso
Исходя из такой занимательной математики можно предположить, что физикам идет оверселл канала до 100 кратных значений? Если подставить среднюю скорость порядка 10 мбит/с при включенных торрентах у всего подъезда. Или там скорость еще меньше?
Leopotam
Нет никакой гарантии на эти 10мбит, гарантия так же покупается за N-ое количество денег как CIR отдельным пунктом.