
Недалек тот час, когда роботы будут везде: в кофейнях, больницах, на кухне, строительных площадках и др. Помимо расширения функционала, роботов стараются сделать дружелюбнее и «человечнее» (хотя бы с точки зрения внешности).
Антропоморфизм в робототехнике — популярное направление. Новый проект недавно реализовали ученые из Японии. Компания Man-Machine Synergy Effectors представила прототип огромного телеуправляемого человекоподобного робота с функциональными манипуляторами и имитацией головы. Робот пока не научился ходить, управляет им оператор из VR-стенда. Следующее поколение оснастят функциональными «ногами».
Как устроен робот
Он состоит из двух частей. Верхний модуль напоминает человеческое тело: туловище, две руки и голову. Точные размеры робота неизвестны. Судя по ролику с демонстрации, он в несколько раз больше человека.
На «кистях» манипулятора робота расположены три пальца для захвата предметов. Надо сказать, что они весьма чуткие и цепкие. Во время демонстрации робот брал футбольный мяч и легкую палку. Палку он запросто вращал пальцами и перекладывал из одной руки в другую. Управлял роборуками человек в VR-стенде. Робот не имитирует движения оператора, а управляется при помощи рычагов.
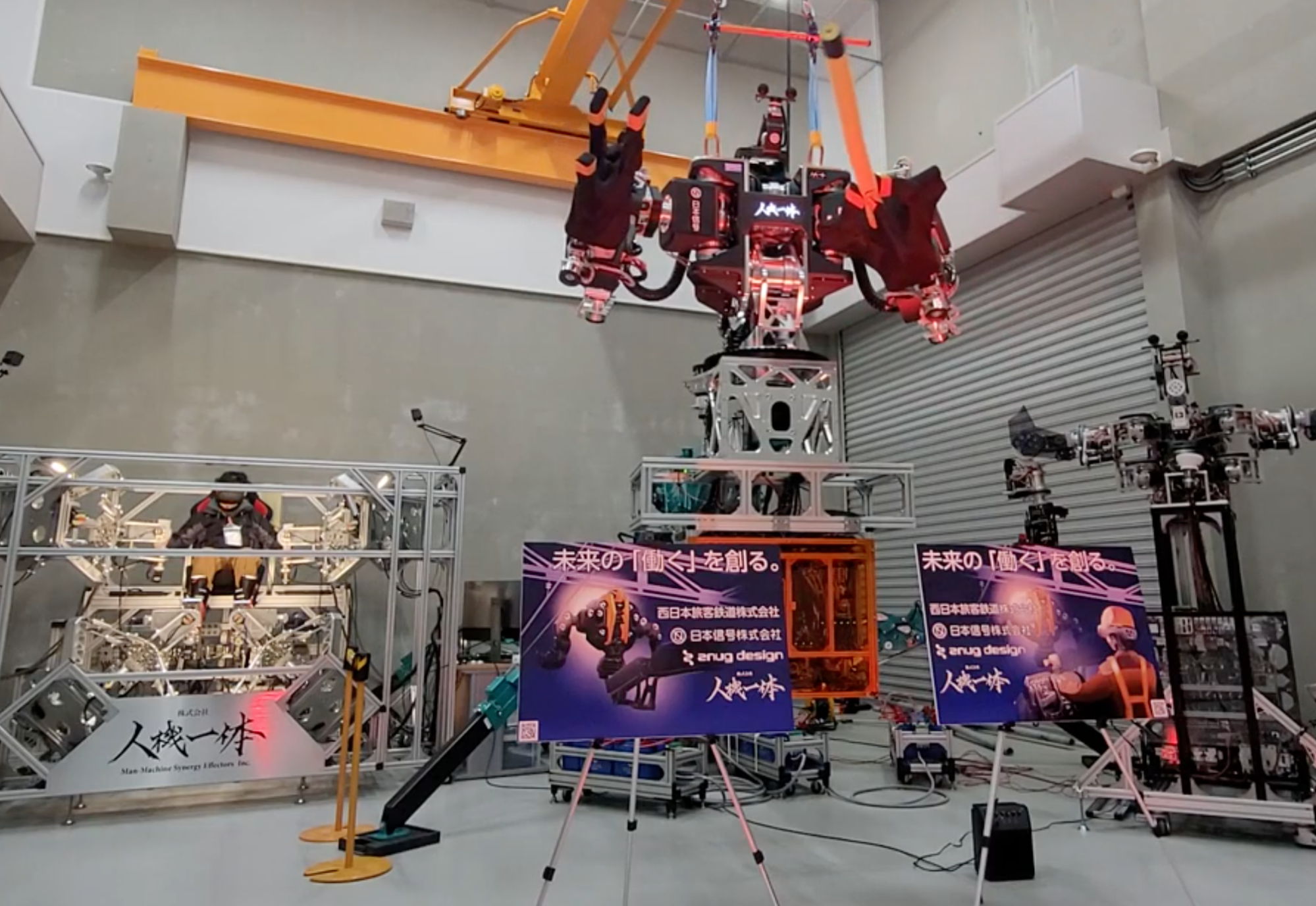
Что за VR-стенд
Как выглядела демонстрация? Рядом с гигантским роботом расположена прозрачная кабина. Внутри нее — кресло в двумя рычагами и педалями для ног. Педали во время демонстрации не были задействованы. Оператор сидит внутри в VR-шлеме и имитирует рычагами движения робота. В шлеме он видит то же самое, что и робот — стереоскопическую картинку с двух камер.
Что приводит в действие движения робота? Рычаги, которыми управляет оператор, прикреплены к стенду дельта-роботами. Дельта-робот — это один из видов параллельного робота. В его состав входят три рычага, закрепленных карданными шарнирами. В основе принципа действия механизма дельта-роботов — использование параллелограммов, которые ограничивают движения конечной платформы. В данном случае конечной платформой выступает гигантский робот.
Зачем нужны большие роботы?
Размер почти всех существующих человекоподобных роботов сравним со средним ростом людей или ниже. И это не случайность — роботы трудятся рядом с человеком в адаптированной для людей среде.
В разработке гигантских роботов есть сложности:
- нет наработанной базы технологий;
- нет аналогичных конструкций в серийных устройствах;
- сложно масштабировать конструкции и технические решения.
Но смысл продолжать исследования есть, поскольку у роботов-гигантов есть перспектива.
Чем может быть полезен высокий робот:
- для производства крупных конструкций;
- для строительства зданий и сооружений;
- для работы в зоне стихийных бедствий с большими завалами.

Периодически появляются новые экземпляры роботов-великанов. В прошлом году японская фабрика Gundam Yokohama тестировала новую разработку — восемнадцатиметрового боевого робота. Его создали по образу и подобию героя аниме-сериала «Gundam». Летом робот публично сделал первые шаги. Во время демонстрации он вставал на колени, поднимал руку и показывал указательный палец.

Еще одна известная разработка — это гиганты от MegaBots Inc. C 2014 по 2017 год компания производила боевых человекоподобных роботов, но в итоге закрылась из-за убыточности бизнеса.





p_fox
"Чем может быть полезен высокий робот"
Ничем. Слишком сложная и непрактичная конструкция. Себя на ногах держать едва сможет, не то чтобы работу выполнять, которую выполняют существующие машины.
"Gundam Yokohama тестировала новую разработку — восемнадцатиметрового боевого робота"
Это не робот вовсе, а аниматронная скульптура.
Tarakanator
В чём принципиальная невозможность держать себя на ногах?
Пилота в ВР, и организовать ему обратную связь(усилия на органах управления и поворот пилота)
думаете после тренировки не сможет держать равновесие?
А полезен он будет как минимум проходимостью и безопасностью(по сравнению с человеком, которого если что раздавить может)
unsignedchar
Добавить еще 2 (а еще лучше 4) ноги — и проходимость повысится, и устойчивость. Человекоморфность нужна роботу только в эстетических целях.
Tarakanator
Человекоподобность нужна для удобства управления.
Человек может управлять человекоподобным роботом на сильно пересечённой местности.
А вот 4-х ногим нет… хотя… можно конечно сделать управление передними ногами-руками человека, но тогда вопрос управления рабочими конечностями.
unsignedchar
Ожидается, что робот сам умеет управлять ногами. Иначе это не робот, а аниматроник какой-то.
Возможно. А как вы это себе представляете?
Tarakanator
Ну посмотрите как в данном случае сделано управление руками. Точно так-же сделать управление ногами. Человека подвесить страховкой за туловище и крутить этот стенд чтобы ещё и вестибюлярный аппарат работал. В первом приближении если робот достаточно быстро отрабатывает команды оператора, то пока оператор не упадёт, робот тоже не упадёт.
Да, я представляю как аниматроника.
А вот как запрограммировать робота для передвижения по сильнопересечённой местности не представляю.
unsignedchar
"Человека подвесить страховкой за туловище и крутить этот стенд чтобы ещё и вестибюлярный аппарат работал"
Как аттракцион это будет супер ;). Но работать это не будет. Попробуйте встать на ходули и подняться или спуститься по ступенькам. Это должно быть очень просто: обратная связь идеально организована, вестибулярный аппарат обманывать не нужно. Просто ноги немного длиннее ;)
"А вот как запрограммировать робота для передвижения по сильнопересечённой местности не представляю."
Я тоже ;). Нужно спросить у Boston Dynamics ;)
Tarakanator
1)На ходулях ещё и руки в процессе хождения участвуют.
2)на ходулях стопы нет.
3)Тренированный человек я уверен пройдёт.
4)Собаку от бостон дайнемикс загоняли на горку, очень плохо она ходит, проходимость колёсной техники лучше.
unsignedchar
Я о том, что даже небольшое изменение в механике тела (убрали подвижную стопу и удлинили ноги) полностью ломает умение ходить. Обучить оператора этим новым трюкам возможно, но более логично обучать робота.
Tarakanator
Логично, но робота обучить сложнее. Пока неизвестно даже сколько времени займёт такое обучение робота.
И ещё момент. Допустим ходить научили. Но надо ещё научить работать.
Или опять-же подключать оператора.
unsignedchar
Да. Но это хорошо масштабируется. Обучили одного робота — можно сделать 100500 копий. Каждого оператора нужно дрессировать индивидуально.
Tarakanator
А толку от масштаба, если одного обучить не могут?
Вы же не считаете что ядерные реакторы не нужно строить, если термоядерные лучше?
unsignedchar
Какую практическую задачу может решить человекоподобный шагающий на 2 ногах робот с человеком внутри? Причем желательно, чтобы с роботом эта задача решалась лучше, чем без него.
Tarakanator
1)С человеком не внутри, а с человеком снаружи.
2)Любые опасные работы, достаточно редкие чтобы для них небыло специализированного автономного инструмента, поэтому выполняемые человеком.
Работа в условиях возможного обвала\взрыва\радиации.
Работа в ближнем космосе (не далее луны).
Понимаете в чём прелесть. Создав одну такую платформу, вы можете использовать её практически везде, т.к. для человека сделана туча инструментов. Да, такая платформа может проигрывать узкоспециализированной, зато она универсальна.
unsignedchar
Отбрасываем вестибулярный аппарат тогда. Или делаем аттракцион с передачей ускорений робота оператору. И не забываем про временные лаги дистанционного управления.
Для этого не нужен 2-ногий шагающий робот. Достаточно манипулятора на любом подвижном шасси.
Тем более, куда шагать в космосе с помощью ног?
Все человеческие инструменты требуют человеческих рук а не ног. Что проще: сделать манипулятор, полностью заменяющий человеческую руку (способный крутить и гайки на 32, и шурупы PH1), или сменные насадки — отвертку и гайковерт, например?
Tarakanator
думаю достаточно будет только вращения.
уже написал, что не далее луны
Посмотрим как ЛЮБОЕ подвижное шасси переберётся через завал или лестницу, в т.ч. вертикальную.
По луне, по обшивке МКС.
Лопата.
учитывае что нужно сделать ВСЕ насадки, возможность проводить работы через жопу(никогда не сталкивались с ситуацией когда нет подходящего инструмента и работы выполняются не подходящим?), возможность помогать себе этим манипулятором при передвижении, считаю что проще сделать манипулятор в значительной степени заменяющий человеческую руку, для кручения гаек есть инструмент для человеческих рук.
unsignedchar
Луна, МКС и радиоактивные развалины на Земле — настолько разные условия, что проще делать специализированных роботов, чем одного универсального человекообразного.
Tarakanator
Скорее не 1 робот, а одно ПО для движения этого робота.
unsignedchar
Мне кажется, что для разных роботов нужно разное ПО. Что общего у робота-паука для МКС, робота-кентавра для Луны и робота-каракатицы для океана? Никого не удивляет, что в телефоне и в роутере ПО разное?
Tarakanator
Меня не удивляет, что и в роутере и в телефоне linux.
Ну плавающий это действительно другой, а для мкс и луны одинаково то, что человекоподобный может выполнять эти функции. Если вам не нужно 100500 роботов, то выгоднее максимально унифицироваться с другими роботами, а не делать нечто уникальное своё.