
В советской космической программе использовались совсем другие органы управления и приборы, чем на американских космических кораблях. Одним из самых интересных навигационных приборов на борту «Союзов» был «Глобус»: он показывал положение корабля над Землёй с помощью вращающегося глобуса.
Этот навигационный прибор был электромеханическим аналоговым вычислителем: он рассчитывал положение корабля с помощью сложной системы шестерён, кулачков и дифференциалов. Официально блок назывался «индикатор навигационный космический», сокращённо ИНК (INK),(примеч. 1) но я буду использовать более наглядное прозвище «Глобус».

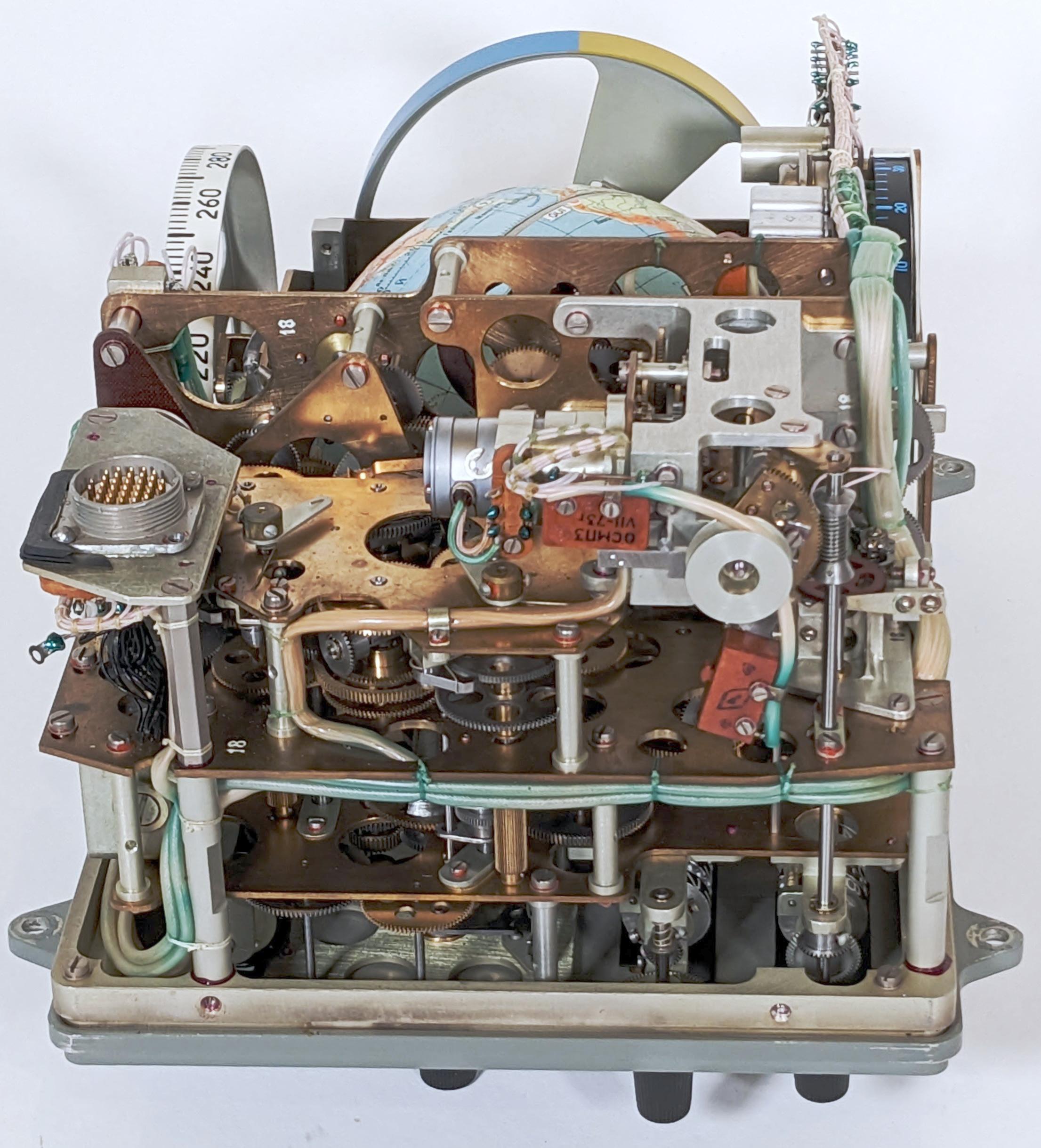
Недавно мы получили «Глобус» от коллекционера и вскрыли его для ремонта и реверс-инжиниринга. В этой статье я объясню, как он работал, покажу его внутренние механизмы и расскажу, что уже удалось выяснить в ходе реверс-инжиниринга. Фото ниже даёт представление о механической сложности этого устройства; кроме механики, в нём есть несколько реле, соленоидов и других электрических компонентов.

Функциональность
Главная задача «Глобуса» — показывать положение космического корабля. Глобус вращался, а неподвижное перекрестие на пластиковом куполе указывало положение корабля. Получалось, что глобус соответствовал виду Земли из иллюминатора, и космонавты могли сверить по нему своё местоположение. Шкалы широты и долготы рядом с глобусом давали численное значение координат. Внизу находилась шкала света и тени: она показывала, когда корабль будет освещён Солнцем, а когда окажется в тени. Для стыковки это была важная информация. Ещё у «Глобуса» был счётчик витков, показывавший число оборотов вокруг Земли.
У «Глобуса» был и второй режим: он показывал, где корабль приземлится, если включить тормозные двигатели и начать спуск. После переключения тумблера глобус поворачивался так, чтобы точка посадки оказалась под перекрестием, и космонавты могли оценить, насколько подходит выбранный район.
Космонавты настраивали «Глобус» вручную: ручками задавали начальное положение корабля и период обращения. После этого «Глобус» электромеханически отслеживал движение по орбите. В отличие от Apollo Guidance Computer, «Глобус» не получал навигационные данные от инерциального измерительного блока (IMU) или других источников, поэтому не знал реального положения корабля. Он показывал только расчётное положение.

Глобус
Сам глобус для своего небольшого размера выполнен очень подробно: на нём показаны горы, озёра, реки и другие элементы рельефа. Эти детали карты помогали космонавтам сопоставлять своё положение с географическими объектами, которые они видели на Земле. Они же были важны при выборе точки посадки: по ним можно было понять, на какой местности предстоит приземляться.
В основном карта не показывает политические границы, за исключением толстых красных и фиолетовых линий. Этими линиями отмечены границы СССР, а также границы между коммунистическими и некоммунистическими странами — это тоже было важно при выборе района посадки. Кроме того, на глобус нанесены пронумерованные круги от 1 до 8: они обозначают радиопункты связи с кораблём и позволяют космонавтам понять, с какими наземными станциями можно выйти на связь.

Управление глобусом
При первом взгляде на «Глобус» возникает закономерный вопрос: как вообще вращается сам глобус? Может показаться, что он должен быть подвешен свободно, чтобы вращаться по двум осям. На самом деле глобус крепится к блоку с помощью хитрого механизма. Главное здесь то, что экватор глобуса — это цельная металлическая деталь, которая вращается вокруг горизонтальной оси блока. А второй зубчатый механизм внутри глобуса вращает его вокруг оси Север — Юг. Два вращения управляются концентрическими валами, закреплёнными в блоке: так через неподвижные валы обеспечиваются две вращательные степени свободы.
На фото ниже показана рамка, которая удерживает глобус и управляет им. Пунктирная ось закреплена в блоке горизонтально, а вращение передаётся через две шестерни слева. Одна шестерня вращает глобус вместе с рамкой вокруг пунктирной оси, а зубчатая передача заставляет глобус вращаться вокруг вертикальной полярной оси, при этом экватор остаётся неподвижным.

Угол выше — 51,8°, и это очень важно: именно такое наклонение у стандартной орбиты «Союза». Поэтому простое вращение глобуса вокруг пунктирной линии заставляет перекрестие описывать стандартную орбиту.(примеч. 2) А вращение двух половин глобуса вокруг полюсов даёт разные орбиты с наклонением 51,8° на поверхности Земли по мере её вращения. Почему именно 51,8 градуса? Байконур, откуда стартуют «Союзы», находится на 45,97° северной широты, так что 45,97° было бы самым эффективным наклонением. Но чтобы трасса пуска не проходила над западным Китаем, ракету приходится уводить севернее, и в результате получается 51,8° (подробности).
Важное следствие такой конструкции: наклонение орбиты жёстко задано углом механизма глобуса. Для разных орбит приходилось делать разные варианты «Глобуса». Более того, эта конструкция работает только с круговыми орбитами, поэтому при изменениях орбиты — например, при сближении и стыковке — от неё нет пользы. Ограничения были настолько серьёзными, что некоторые космонавты хотели убрать «Глобус» с панели управления, но он оставался там до тех пор, пока в «Союзе-ТМА» его не заменили компьютерным дисплеем в 2002 году.3

Этот экземпляр «Глобуса» явно пережил повреждения. На задней крышке корпуса были крупные вмятины.(примеч. 7) Что важнее, вал глобуса выбило из штатного положения, и он перестал входить в зацепление с шестернями. Из-за этого на Африке появилась глубокая царапина: глобус задел внутренние компоненты. К счастью, CuriousMarc смог вернуть глобус на место и при этом правильно выставить фазы шестерён. Если бы глобус поставили произвольно, широта и долгота сбились бы.
Орбитальная скорость и «конус»
Один виток «Союза» вокруг Земли занимает примерно 90 минут, но точное время зависит от высоты орбиты.(примеч. 4) У «Глобуса» есть ручка настройки орбитального периода (ниже): период задаётся в минутах, десятых и сотых долях минуты. Внешняя ручка имеет три положения и указывает на разряд, который меняется при вращении внутренней ручки. Механизм позволяет корректировать период в пределах ±5 минут от номинального значения 91,85 минуты.(примеч. 3)

Настройка орбитальной скорости реализована через увеличение или уменьшение скорости, с которой глобус вращается вокруг орбитальной, то есть горизонтальной, оси. Получить переменную скорость непросто, потому что «Глобус» работает от фиксированных импульсов частотой 1 Гц. Решение такое: взять базовую скорость и добавить к ней три приращения — для минут, десятых долей минуты и сотых долей минуты.(примеч. 5) Эти четыре скорости складываются как скорости вращения валов, в результате получается общая скорость вращения.
В «Глобусе» используется множество дифференциалов, которые складывают или вычитают вращения. На фото ниже показаны два дифференциала, расположенные рядом.

Проблема в том, как получить три переменные скорости вращения из фиксированного входного сигнала. Для этого используется специальный кулачок, похожий на конус со спиральным поперечным сечением. По кулачку идут три толкателя: когда кулачок вращается, толкатель отжимается наружу и поворачивается на своём валу. Если толкатель находится ближе к узкой части кулачка, он проходит небольшое расстояние и поворачивается на небольшой угол. Если ближе к широкой части — расстояние больше и поворот сильнее. Поэтому, перемещая толкатель в нужную точку кулачка, можно выбрать скорость его вращения.

Понятно, что кулачок не может раскручиваться по спирали бесконечно. Поэтому в конце одного оборота его поперечное сечение резко возвращается к начальному диаметру. Из-за этого толкатель мгновенно отскакивает в исходное положение. Чтобы глобус при этом не дёргался назад, толкатель соединён с дифференциальной передачей через фрикционную муфту и храповик. Когда толкатель отскакивает назад, храповик удерживает приводной вал неподвижным. Затем вал продолжает вращаться, пока толкатель снова начинает свой рабочий ход наружу. В итоге на выходе получается почти плавное вращение со скоростью, зависящей от положения толкателя.
Широта и долгота
Индикаторы слева и сверху от глобуса показывают соответственно широту и долготу космического корабля. Эти величины задаются неожиданно сложными функциями, которые получаются из проекции орбиты на глобус.(примеч. 6)
Функции широты и долготы реализованы формой металлических кулачков; на фото ниже показан механизм долготы. Для каждой функции используется два кулачка: один задаёт нужную функцию, а второй имеет «обратную» форму и поддерживает натяжение в похожем на клещи следящем механизме.

Кулачок широты приводит в движение шкалу широты, заставляя её колебаться между 51,8° северной широты и 51,8° южной широты. С долготой всё сложнее: из-за вращения Земли она постоянно меняется. Значение долготы на шкале получается сложением значения с кулачка с вращением Земли через дифференциал.
Свет и тень
У «Глобуса» есть индикатор, показывающий, когда космический корабль входит в освещённую область или в тень. Шкала состоит из двух концентрических шкал, которые настраиваются двумя ручками. Эти шкалы движутся вместе с орбитой корабля, а красная надпись остаётся неподвижной. Думаю, эти шкалы связаны зубчатой передачей со шкалой долготы, но я ещё разбираюсь.

Механизм расчёта точки посадки
«Глобус» может показать, где приземлится корабль, если прямо сейчас начать тормозной импульс для входа в атмосферу. Точность — около 150 км. Это вычисляется проекцией текущей орбиты вперёд на часть витка, в зависимости от того, сколько времени займёт спуск. Космонавт задаёт это значение через «угол посадки»: он показывает соответствующую долю витка в виде угла. Электролюминесцентный индикатор в левом верхнем углу блока показывает «Место посадки», обозначая этот режим.

Чтобы получить точку посадки, двигатель вращает глобус, пока тот не остановится после поворота на заданный угол. Механизм, который это реализует, показан ниже. Ручка настройки на панели вращает регулировочный вал, а тот через червячную передачу перемещает концевой выключатель на нужный угол. Проводка намотана на колесо, чтобы при таком перемещении она оставалась под контролем.
Когда включается приводной двигатель, он одновременно вращает глобус и качающийся рычаг. Двигатель останавливается, когда рычаг доходит до углового концевого выключателя, поэтому глобус поворачивается ровно на заданный угол. Неподвижный концевой выключатель используется при возврате глобуса в обычное орбитальное положение.

Режим отображения точки посадки включается трёхпозиционным поворотным переключателем. Первое положение — «МП» («место посадки») — выбирает точку посадки, второе — «З» («Земля») — показывает положение над Землёй, а третье — «Откл» — отменяет поворот на угол посадки и выключает механизм.

Электроника
Хотя «Глобус» в основном механический, в нём есть электронная плата с четырьмя реле и транзистором, а также резисторами и диодами. Думаю, большая часть этих реле управляет механизмом точки посадки: включает двигатель вперёд или назад и останавливает его по концевому выключателю. Диоды — это защитные диоды: по два диода последовательно параллельно каждой катушке реле, чтобы гасить индуктивный выброс при отключении катушки.

Потенциометр на 360° (ниже) преобразует орбитальное положение корабля в напряжение. В источниках указано, что «Глобус» передаёт этот сигнал напряжения другим блокам космического корабля. Моя версия: транзистор на электронной плате усиливает это напряжение, но я пока ещё разбираюсь.

На фото ниже показаны многочисленные жгуты проводки внутри «Глобуса» — спереди и слева. Электронная плата находится спереди справа. Для устройства, которое в основном построено на механике, в «Глобусе» неожиданно много проводов. Неудобно, что все провода к внешнему разъёму блока (слева вверху) были обрезаны.(примеч. 7) Возможно, это было частью процедуры списания прибора. Но один из винтов корпуса закрыт защитной восковой пломбой со знаком, и эта пломба осталась целой. Значит, после обрезки проводов блок официально снова опломбировали, что плохо вяжется со списанным устройством.

Приводные соленоиды
Блок приводится в движение двумя храповыми соленоидами: один отвечает за орбитальное вращение, второй — за вращение Земли. На соленоиды подаются 27-вольтовые импульсы с частотой 1 Гц.(примеч. 3) Каждый импульс сдвигает шестерню на один зуб, а собачка не даёт ей провернуться назад. Эти небольшие повороты передаются на зубчатые передачи по всему «Глобусу» и в итоге дают крошечное смещение самого глобуса.


«Аполлон — Союз»
Если присмотреться к глобусу, на нём можно заметить множество добавленных розовых точек с трёхбуквенными подписями латиницей, а не кириллицей.(примеч. 8) На фото ниже видны GDS (Goldstone), MIL (Merritt Island), BDA (Bermuda) и NFL (Newfoundland). Это станции слежения NASA, а значит, этот «Глобус», вероятно, был изготовлен для экспериментального полёта «Аполлон — Союз» 1975 года, во время которого корабль Apollo состыковался с кораблём «Союз».

Ещё одно подтверждение связи с программой «Аполлон — Союз» — наклейка VAN посреди Тихого океана (на фото выше её не видно). USNS Vanguard был судном слежения NASA, которое использовалось в программе Apollo, чтобы закрывать разрывы в радиопокрытии. Изначально это был нефтяной танкер времён Второй мировой войны, после войны переоборудованный в судно слежения за ракетами, а затем использовавшийся для Apollo. На фото ниже видны большие антенны слежения на его палубе. Во время миссии «Аполлон — Союз» Vanguard находился в точке 25° ю. ш., 155° з. д. — это точно совпадает с положением точки VAN на глобусе.

История
У «Глобуса» долгая история, уходящая к самому началу советской пилотируемой космонавтики. Первая версия была проще и имела русскую аббревиатуру ИМП (IMP).(примеч. 9) Разработка ИМП началась в 1960 году для полётов кораблей «Восток» (1961) и «Восход» (1964).
.")
Базовые функции более раннего «Глобуса» ИМП похожи на функции ИНК: он показывал положение космического корабля и точку посадки. В правом нижнем углу у него был счётчик витков. Индикаторы широты и долготы сверху добавили для полётов «Восхода». Большая ручка коррекции позволяла настраивать орбитальный период. Главное отличие в том, что у ИМП нет нижнего индикатора света и тени и нет органа управления для задания угла посадки.(примеч. 9) В отличие от ИНК, режим — орбитальное положение или точка посадки — выбирался внешними переключателями, а не переключателем на самом блоке.
Более сложная модель ИНК, о которой идёт речь в этой статье, была создана для полётов «Союза», начиная с 1967 года. Она входила в состав информационно-отображающей системы «Сириус». В ИОС «Нептун», использовавшейся на «Союзе-Т» (1976), и «Нептун-М» для «Союза-ТМ» (1986) большая часть пульта была модернизирована, но «Глобус» ИНК сохранили. На фото ниже видно, что «Глобус» установлен в правой верхней части пульта «Союза-ТМ».
.")
В «Союзе-ТМА» (2002) систему обновили до «Нептун-МЭ»3 с цифровыми экранами. В частности, «Глобус» заменили графическим дисплеем ниже.

Подведем итоги
«Глобус» ИНК — замечательный образец инженерной механики: аналоговый вычислитель, который рассчитывает орбиты через сложную систему шестерён, кулачков и дифференциалов. Он давал космонавтам полноцветное изображение положения корабля с высоким разрешением — намного более наглядное, чем мог обеспечить электронный космический компьютер в 1960-х.
При всей впечатляющей механической вычислительной магии возможности «Глобуса» ограничены. Его параметры нужно задавать вручную: начальное положение космического корабля, орбитальную скорость, области света и тени, угол посадки. Он не принимает внешние навигационные данные, например от IMU (инерциального измерительного блока), поэтому особой точностью не отличается. Наконец, он поддерживает только круговую орбиту с фиксированным наклонением. Современный цифровой дисплей, конечно, лишён физического обаяния вращающегося глобуса, зато даёт куда больше возможностей.

Примечания и ссылки
1. На русском устройство называется «Индикатор навигационный космический», сокращённо ИНК (INK). На английский это переводится как space navigation indicator. Название «Глобус» (Globus), похоже, было прозвищем.
2. Чтобы понять, как угол между полюсами и осью вращения глобуса даёт нужное наклонение орбиты, рассмотрим два предельных случая. Сначала предположим, что угол между ними равен 90°. В этом случае глобус стоит «прямо», с горизонтальным экватором. Если вращать глобус вокруг горизонтальной оси, переворачивая полюса «через голову», перекрестие опишет полярную орбиту, то есть мы получим ожидаемое наклонение 90°. Теперь предположим, что угол равен 0°. В этом случае глобус лежит «на боку», с вертикальным экватором. При вращении глобуса перекрестие останется над экватором, что соответствует экваториальной орбите с наклонением 0°.
3. Подробное описание «Глобуса» на русском языке есть в этом документе, в разделе 5.
4. Или наоборот: высота зависит от скорости.
5. Обратите внимание: орган управления на панели настраивает период орбиты, а механизм внутри изменяет скорость движения по орбите. Это взаимно обратные величины, поэтому линейные изменения периода дают гиперболические изменения скорости. Однако сам механизм меняет скорость линейно, и на первый взгляд кажется, что это не должно работать. Но поскольку сам период велик по сравнению с его изменением, линейное приближение оказывается достаточно хорошим, а ошибка мала — около 1%. Возможно, конус имеет нелинейную форму, которая это компенсирует, но по фотографиям я такой нелинейности не заметил.
6. Широта задаётся формулой arcsin(sin i sin (2πt/T)), а долгота — формулой λ = arctan (cos i tan(2πt/T)) + Ωt + λ0, где t — время полёта космического корабля, начиная от экватора, i — угол наклонения (51,8°), T — орбитальный период, Ω — угловая скорость вращения Земли, а λ0 — долгота восходящего узла.(примеч. 3)
Формула широты проще формулы долготы, потому что широта повторяется на каждом витке. Долгота, напротив, постоянно меняется, поскольку Земля вращается под кораблём.
7. На задней стороне «Глобуса» находится 32-контактный разъём — стандартный советский военный разъём RS32TV. На корпусе также видны вмятины; до того как CuriousMarc их выправил, они были намного больше.

8. Станции слежения NASA, отмеченные точками: CYI (остров Гран-Канария), ACN (остров Вознесения), MAD (Мадрид, Испания), TAN (Тананариве, Мадагаскар), GWM (Гуам), ORR (Оррорал, Австралия), HAW (Гавайи), GDS (Голдстоун, Калифорния), MIL (Мерритт-Айленд, Флорида), QUI (Кито, Эквадор), AGO (Сантьяго, Чили), BDA (Бермуды), NFL (Ньюфаундленд, Канада) и VAN (судно слежения Vanguard). Большинство этих станций входило в Spacecraft Tracking and Data Network. Номера 1–7, по-видимому, обозначают советские пункты связи, хотя меня озадачивают 8 в Новой Шотландии и 9 в Гондурасе.
9. Подробности о более раннем «Глобусе» ИМП есть на этом сайте, включая обсуждение четырёх разных версий — от ИМП-1 до ИМП-4. Информация также есть в Википедии.
Читайте также:
Комментарии (17)

vesowoma
17.06.2026 15:09Угол выше — 51,8°, и это очень важно: именно такое наклонение у стандартной орбиты «Союза».
51,6 на самом деле, в примечаниях там объясняют почему 51,8, но сразу оговариваются что не менее 51,65, но у нас принято было всегда указывать 51,6 без сотых градуса


DimaIam
17.06.2026 15:09Классный материал, спасибо! У меня в голове иногда не укладывается как люди придумывают такое.

VT100
17.06.2026 15:09Всë просто, сначала - была механика. И даже в названии института вычислительной техники сохранилось “… точной механики и …”. Вроде, на Хабре были разборы механических артиллерийских СУО.




maingame
17.06.2026 15:09Интересная статья.
Лет 20 назад, нашел приборную панель радара, от военного самолета. Удивило, что положением самолета, и объектом на радаре, управляли моторчики, еще внутри была система узких и длинных зеркал. жаль не сохранился, разобрал на запчасти.

Xipi
17.06.2026 15:09Нормально. И познавательно, но заглавие все равно режет глаз. Может дело во мне?

galapagos
17.06.2026 15:09В музее, где работал приятель, залазил в посадочный модуль Союза, побывавший в космосе. Шарик довольно маленький, на ум приходили полеты по пачке Беломора...

Radisto
17.06.2026 15:09Интересно, а можно сделать какой-нибудь способ отображать электронную информацию на глобус? Чтобы совместить удобство и мощь электронники и наглядность физического "шарика". Прозрачный сферический жк-дисплей поверх вращающегося глобуса или ещё какие-нибудь


{kind=link}
Fishkarius
Статья Cloud4Y от 2023 года:
"«Глобус ИНК» — замечательный механизм, аналоговый компьютер, который вычисляет орбиты с помощью сложной системы шестерён, кулачков и дифференциалов. Он предоставил космонавтам полноцветное отображение положения космического корабля с высоким разрешением, намного превосходящее то, что мог бы предложить космический компьютер в 1960-х годах. "
Текущая статья:
"«Глобус» ИНК — замечательный образец инженерной механики: аналоговый вычислитель, который рассчитывает орбиты через сложную систему шестерён, кулачков и дифференциалов. Он давал космонавтам полноцветное изображение положения корабля с высоким разрешением — намного более наглядное, чем мог обеспечить электронный космический компьютер в 1960-х. "
Меня терзают смутные сомнения
ssj100
Так скорее переведено с одного оригинала
qadmium
Вот с этого https://www.righto.com/2023/03/reverse-engineering-globus-ink-soviet.html?m=1
MatVL
Да, читаю и думаю, что вроде уже читал тоже самое
https://habr.com/ru/companies/cloud4y/articles/724554/