

Сразу скажу, что в отличие от ув. kuzmuk (автор оригинальной статьи) процесс изготовления астротрекера занял у меня не два вечера, и даже не две недели, а целых два месяца. Но столь длительный срок связан, прежде всего, с длительной доставкой некоторых комплектующих из Китая. При создании трекера я ставил перед собой две главные цели: максимальная простота конструкции и максимальная точность трекинга итоговым устройством.
1. Привод
В оригинальной статье в приводе используется шаговый двигатель с драйвером и Arduino в качестве контроллера. Но так как до этого проекта я не имел никакого опыта программирования Arduino, я решил использовать простой двигатель постоянного тока (ДПТ). Тем более что я встречал в интернете множество конструкций трекеров именно с ДПТ. Я заказал на Ebay моторчик на 5В, со встроенным редуктором, с итоговой скоростью около 8 об/мин. При условии стабилизированного питания я ожидал получить постоянную выходную скорость, хотя я и понимал что скорость вращения ДПТ зависит от нагрузки.

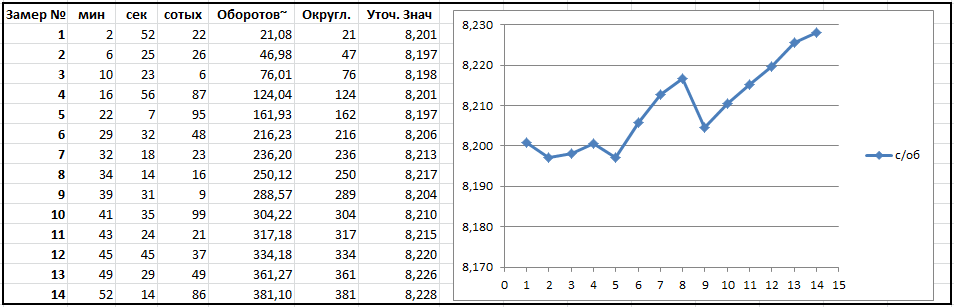
Каково же было мое разочарование. Дело в том, что даже без нагрузки, с питанием от лабораторного источника, скорость двигателя не была стабильной. На рисунке ниже видно как «плавают» обороты с течением времени. У меня не было точного инструмента для определения скорости, поэтому я использовал метод интервальных измерений с уточнением. Результат был неприемлем.
Не оставалось другого выхода кроме как использовать двигатель с синхронной скоростью, коим является шаговик 28BYJ-48. Беглое изучение Arduino показало что никаких сложностей нет, и вся программа сводится к попеременному включению четырех фаз двигателя с определенной задержкой. Скорость, как и ожидалось, в такой системе была очень стабильной.

Кроме того, использование Arduino давала возможность очень точной настройки скорости вращения, а значит уменьшались требования к точности изготовления передаточного механизма.
2. Поворотный механизм и передача
Я не счел нужным использовать лазерную резку для изготовления основания, т. к. никаких ограничений на размер будущего трекера я не накладывал. Напротив, чем больше по размерам основание, тем выше точность за счет меньшего люфта в оси. За основание я взял две фанерные разделочные доски из Ашана. Навесы выбрал с минимальным зазором (в последствии зазор еще был скомпенсирован молотком) и расположил по краям основания. Чем больше расстояние между навесами, тем точнее работа механизма. Шпильку согнул по методу, описанному в исходной статье.

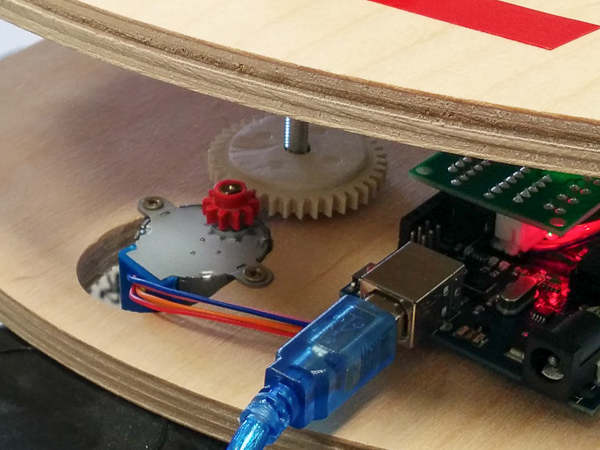
Шестерни также не стал изготавливать на заказ, а взял из старого советского лунохода с передаточным числом ~4. В моем случае оно составило 3,8. В большую шестерню посадил на термоклей гайку.

Итоговый вид передачи:
3. Расчет скорости вращения
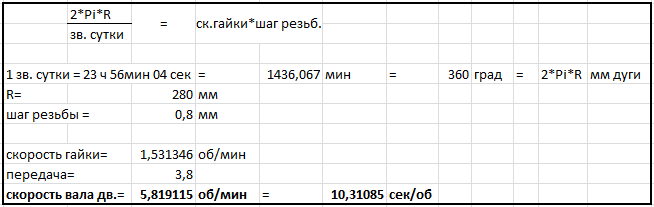
Расчет необходимой скорости вращения вала двигателя не составляет особого труда, если вы понимаете основные принципы. Все базируется на одном уравнении. Для удобства я использовал Excel:
4. Калибровка
Я понимал, что при изготовлении идеально точно выдержать все размеры трекера не получится при всем желании. Ошибка будет в любом случае, поэтому я заранее разработал методику по её компенсации. Заключается она в лазерной калибровке трекера: на проворачивающуюся часть устанавливается лазер и светит на экран, расположенный на заведомо известном расстоянии от оси трекера. Так, замерив время включения и выключения трекера, можно рассчитать какой путь должна пройти точка лазера на экране и соотнести его с реально измеренным рулеткой. Чем дальше находится экран и дольше работает трекер, тем точнее результат.

Надо признать даже без калибровки ошибка трекинга составляла всего около 0,8%. После подстройки времени паузы между коммутацией фаз шаговика ошибка составила около 0,2%. В таблице ниже видно, как уменьшается ошибка с увеличением времени паузы.

Программу для Arduino оставил максимально простой. Все что она делает — это коммутирует фазы шаговика с паузой, определенной выше. Вращение начинается сразу после подачи питания. Также коммутируется одновременно только одна фаза — момент двигателя в этом случае меньше (его и так с избытком), но батарейки живут 2 раза дольше.
#define IN1 8
#define IN2 9
#define IN3 10
#define IN4 11
int time_del=5000; //микросекунд
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
void loop() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
delayMicroseconds(time_del);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
delayMicroseconds(time_del);
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
delayMicroseconds(time_del);
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
delayMicroseconds(time_del);
}
После настройки заменил плату на Arduino Micro, которая отлично встала на плате драйвера двигателя, и поместил все в пластиковый корпус. В качестве источника питания использовал PowerBank на 2300 мАч (хватает на ~ 5 часов трекинга).

5. Лазерный прицел
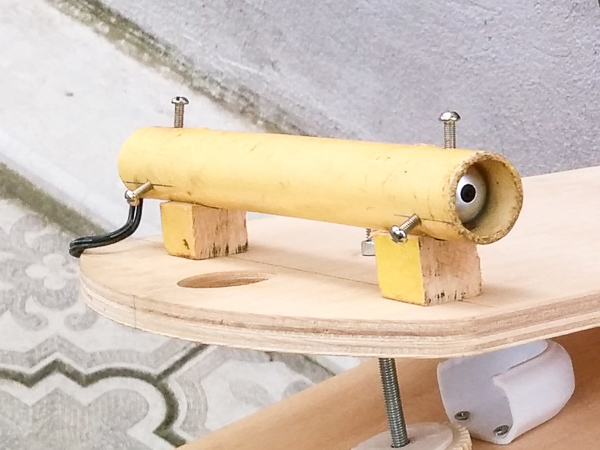
Имея некоторый опыт астрономических наблюдений я понимал, что большой проблемой будет наводка трекера на Полярную звезду. На глаз выставлять ось неприемлемо, а устанавливать искатель полюса не хотелось ввиду его стоимости. Поэтому решил изготовить самодельный лазерный прицел. Для этого заказал вот такой зеленый лазер с длиной волны 532 нм и мощностью 5мВт. Судя по информации в интернете его луч должен был быть отчетливо виден в темноте.
Чтобы иметь возможность тонкой подстройки направления луча лазера, в качестве крепления использовал пластиковую трубку большего диаметра с винтовой регулировкой:
При этом процесс калибровки соосности луча лазера с осью трекера выглядел следующим образом: измеряется расстояние между осью лазера и осью трекера, далее чертится окружность с радиусом равным изменённому значению. Окружность (назовём её мишень) помещается на некотором расстоянии от трекера и вручную изменяется положение подвижной части трекера. Если оси параллельны, то луч лазера должен идти точно по окружности. И опять же: чем больше расстояние между трекером и мишенью, тем точнее результат.
По поводу видимости в темноте, надо сказать, китайцы не обманули:

6. Прочее
Для съемки использовался фотоаппарат Nikon D7000 с объективом Sigma 17-50 f2.8. Для установки его на трекере заказал на Ebay 3D головку, а чтобы избежать тряски при спуска затвора — проводной пульт управления.
Итоговый вид конструкции:

Питание лазера осуществляется от того же PowerBank через тумблер в блоке управления.
Отдельно несколько слов стоит сказать про штатив. У меня самодельный, легко справляется с нагрузкой в несколько килограмм, но явно не хватает точной регулировки. Причем именно точной, грубая в общем-то совсем не нужна, т.к. полярная звезда всегда находится в одной точке небосвода. Можно изначально рассчитать длину ножек штатива так, чтобы он давал наклон трекера ~45 градусов, а далее с помощью точной регулировки навестись на звезду.
Для предварительного планирования съемки очень помогает программа виртуальный планетарий Stellarium. Можно задать координаты и время и посмотреть в какой точке неба в этот момент будет центр Млечного Пути и другие объекты и не помешает ли Луна.
Также вот этот сайт очень полезен при выборе места съемки. Он представляет собой карту светового загрязнения. Выбирайте наименее засвеченные области.
7. Результаты
Выдержка на фото 5-7 мин, диафрагма 4, ИСО 400.




На последнем фото с Туманностью Андромеды виден небольшой смаз, но я думаю это из-за сбившейся наводки на полюс мира.
Съемку проводил ясной ночью, вдали от городской засветки и при отсутствии Луны. В таких условиях глаза быстро привыкают к темноте и плоскость нашей галактики можно видеть невооруженным глазом. Результатом остался более чем доволен. А сам процесс подготовки, наблюдения и съемки приносит истинное наслаждение.
Комментарии (26)



Karlson_rwa
13.10.2015 21:00Здорово!
Я правильно понимаю, что это одиночные кадры, а не результаты сложения?unnk2004
13.10.2015 21:09Спасибо! Да, Вы правильно понимаете. Для того я и делал трекер, чтобы не заниматься склейкой кадров. Хотя, вероятно, со сложением можно было бы еще снизить уровень шумов.


OTIOSE
14.10.2015 08:49Добавьте дарков, флетов, оффсетов, снимите серию таких 5 минутных снимков, проведите через maximdl, ну или dss, и должна получиться красота. А так, очень хороший бюджетный вариант, так как сейчас монтировка eq3 подорожала в 3 раза и стоит как бюджетный телескоп.
Кстати, вы не пробовали увеличивать выдержку или появляется смазанность?unnk2004
14.10.2015 09:19Максимальную выдержку ставил порядка 11 мин. Вот фото 681s, ISO400, f4, 17mm:

Отчетливо видно как за 11 минут вращения трекера размазались деревья.
А вот кроп 100% того же кадра:

Смаз есть, но незначительный. Меня больше цветовой шум волнует, хотя исо вроде бы не высокое использовал. Видимо нужно делать серию и сшивать как вы сказали.
По поводу смаза я грешу в первую очередь на свой самодельный штатив. Он определенно нуждается в доработке по точному наведению на полюс мира. А вообще при выдержках более 10 минут нужно применять уже активное гидирование, т.е. определенная программа следит чтобы звезды были неподвижны и корректирует скорость и направление трекинга по мере необходимости.
r00tGER
14.10.2015 12:03Даже на минимальном исо, при долгой выдержке шумы начинают проявляться. Тут только постобработка поможет.
geovas333
14.10.2015 09:58+1Никогда не думал, что можно, такими небольшими усилиями запечатлеть такую красоту! Все, хотеть!


zedalert
14.10.2015 18:03Почему все любительские трекеры собираются по подобной схеме (2 плоскости и изогнутая шпилька), в то время как все коммерческие выполнены в виде вращающейся на платформе головы? Есть какие-то подводные камни в подобной сборке?
unnk2004
14.10.2015 20:03На мой взгляд причины здесь две и обе они связаны с более простой конструкцией:
1) В случае вращающейся головы нужно обеспечить подвижное соединение двух плоскостей с минимальным люфтом. При этом оно должно держать фотоаппарат (телескоп), имеющий приличную массу. Думаю, без хороших подшипников здесь не обойтись. В этой же конструкции минимальный люфт обеспечивается простыми навесами разнесенными на максимальное удаление.
2) Редуктор. Чтобы вращать голову со скоростью 1оборот в 24 часа нужен соответствующий редуктор. Можно сделать его на том же шаговом двигателе, но без дополнительных нескольких шестеренок не обойтись. А тут шпилька является главным понижающим редуктором. Опять же: просто и дешево.zedalert
14.10.2015 21:52Спасибо за пояснения. Ещё вопрос — получается для трекера из электроники нужны только Arduino nano и шаговый двигатель с контроллером (судя по ebay в сумме меньше $10)?
PS Глядя на внутренности нано трекера к нему уважения ещё меньше, чем к двум доскам и шпильке, при этом за него просят в 10 раз больше.
coceg
15.10.2015 02:58Фотографии классные! Всегда интересовал вопрос, если насчелкать 300 фотографий с секундной выдержкой, а потом программно повернуть/совместить, результаты будут похожими? Если да, то стоит ли это того?
DancingOnWater
15.10.2015 09:52Будет хуже или лучше, в зависимости от того, что снимаете. Все дело в шумах. Есть, грубо говоря, два вида шума:
1)Шум от окружающей среды, в данном случае от неба.
2)Шум оборудования.
Применительно (опять же грубо) к камерам у нас есть тепловой шум матрицы и шум считывания, т.е. шум который добавляется при считывании кадра с матрицы.
Если снимается неподвижный объект, относительно оптической оси системы, то одна фотография будет однозначно лучше. Т.к. там только шум неба + тепловой шум + один шум считывания ( в серии будет n шумов считывания).
Если мы снимаем движущийся объект, то после его смещение в пикселе не копится полезный сигнал, а только шум от неба и тепловой и вот тут можно считать кадр.unnk2004
15.10.2015 10:05Согласен. Конкретно в этом случае фотографии с выдержкой 1с будут сильно недоэкспонированны, я сомневаюсь что из них хоть какую-то информацию можно будет вытащить. Ну и лично мне было бы жалко так убивать затвор. Можно попробовать сделать штук 10 снимков по 30 секунд выдержки (но это уже предел выдержки до смаза на 17мм) на высоких ISO, а потом соединить их в редакторе с целью уменьшить шум.
DancingOnWater
В конце пятого раздела очень странные пятна на луче. По идее это рассеивание на каплях воды в воздухе, но тогда мы должны видеть совершенную другую картину на фотографии.
unnk2004
Это точно не капли воды, т.к. в ту ночь воздух был довольно сухой. Возможно, насекомые попали в луч…

DancingOnWater
Ну то, что воздух был без избытка влажности — это видно по снимку. Насекомые? — по идее тогда рассеивание должно выглядеть несколько иначе.
blind_oracle
Обычные пылинки в ярком излучении вызывают такие эффекты, тем более когда фокус на бесконечность — близкие предметы размываются.
VIK52
Ну надо же так все упростить. Мулдашева на вас нету, он бы тут всем мозги вправил....)))
qbtarzan
I want to believe ©
AdmAlexus
НЛО прилетело… и решило ничего здесь не публиковать.