
Существует достаточно много различных конструкторов для занятия робототехникой с детьми. Это Lego, Fischertechnik, Huna, Multiplo, Трик. Можно ознакомится с ними в отличной статье MakeItLab
Казалось бы — выбирай не хочу! Но на детских соревнованиях по робототехнике мы неизменно видим одно и то же. С одной стороны стенды со стройными рядами Lego-роботов. С другой стороны акриловые блины с деталями из советского конструктора, синей изолентой, подручными средствами и палками на базе Arduino. А ещё у них есть один фатальный недостаток.
«Хватит это терпеть» — подумали мы, и запилили свой конструктор, с Arduino и доступным конструктивом.
Мы уже больше года выпускаем мозг для роботов «Strela». Моторчики, сервоприводы и датчики у нас тоже есть. Для полного счастья не хватало только конструктива, который позволял бы соединять это всё в элегантного робота. После некоторых дебатов, длившихся всего-то около года, было принято решение: «Роботу — быть!».
При этом хотелось, что бы из одних и тех же деталей можно было собирать разных роботов. А то грустно смотреть на соревнования одинаковых блиноботов на Arduino. В общем, идею изобрести очередной акриловый «блин» с удовольствием отмели.
Идея была следующей: нам нужен конструктор. То есть какой-то набор деталей, из которых можно что-то собрать. Первоначальная идея конструктора была примерно такой: должен существовать какой-то конструктив, имеющий какое-то стандартное крепление. Должны существовать интерфейсные модули, к которым прикрепляются разные устройства. Это могут быть моторы, датчики, батарейные отсеки, сервоприводы, микроконтроллерные платы — да что угодно! Интерфейсные модули должны позволять простым способом соединять все эти устройства между собой при помощи стандартного крепления. Комбинируя различные интерфейсные модули разными способами можно получить разных роботов. Примерно так же всё работает и у Lego.
Очень хотелось сохранить совместимость интерфейсных модулей с советским металлическим конструктором. Этот конструктор всё ещё производится, он очень надёжен, дешёв, широко распространён, и поэтому массово используется при постройке arduino-роботов.
Нам очень хотелось, что бы у каждого роботостроителя была возможность сделать самостоятельно любую деталь, даже свою собственную. Где бы он не находился. Поэтому литьё, 3D-печать и штамповка из металла тоже отпадают. Нужно было искать что-то, что можно сделать в любой мастерской по производству наружной рекламы. Такие мастерские есть почти в каждом городе. Из этих соображений мы и плясали при выборе материалов и способа производства.
Что бы это такое могло быть?
Первое что приходит в голову — конечно акрил. Отдаёшь чертёж рекламщикам и получаешь готовые детали. Резка из акрила — это очень просто. Начертил деталь в любом 2D редакторе, отдал рекламщикам — получил деталь. Красота!
Наш главный евангелист детской робототехники Алексей Перепёлкин в одиночку продумал и начертил набор интерфейсных модулей для производства из акрила. Получилось вот так:
Хоть роботы и получались вариативными, но чего-то не хватало. Все детали соединялись между собой исключительно пластиковыми стоечками или винтами М3. Поэтому в итоге получилась такая реинкарнация акрилового блина, но только вытянутого в третьем измерении костылём в виде стоечек. Это как с трёхмерностью в Wolfenstein 3D — круто, но чего-то не хватает! Модули не получится ставить боком без привлечения некоторой дополнительной сущности. Этой сущностью могли быть алюминиевые уголки. Примерно так и сделано в Multiplo.
Плюсы: отверстия под винты по квадратной сетке со стороной 1 см. Полная совместимость с советским конструктором:)
Но уголки для своего робота мы использовать не могли. Хоть руководитель кружка и может легко достать их из советского конструктора, но для нас это всё равно костыль, который обернулся бы лишними заморочками при производстве. И этот уголок нельзя изготовить в любой наружно-рекламной мастерской. Думаем дальше.
Я попробовал немного видоизменить акриловую концепцию, добавив к ней возможность соединения пластин акрила под прямым углом при помощи специальных ушек и тех же пластиковых стоечек.

За одно попробовал грубой силой вместить робота в стандарты мини сумо, утрамбовав его до размеров 10x10 см. Проблема в том, что сама плата Strela длиннее 10 см. Получилось, но итоговый концепт-бот мне не понравился.

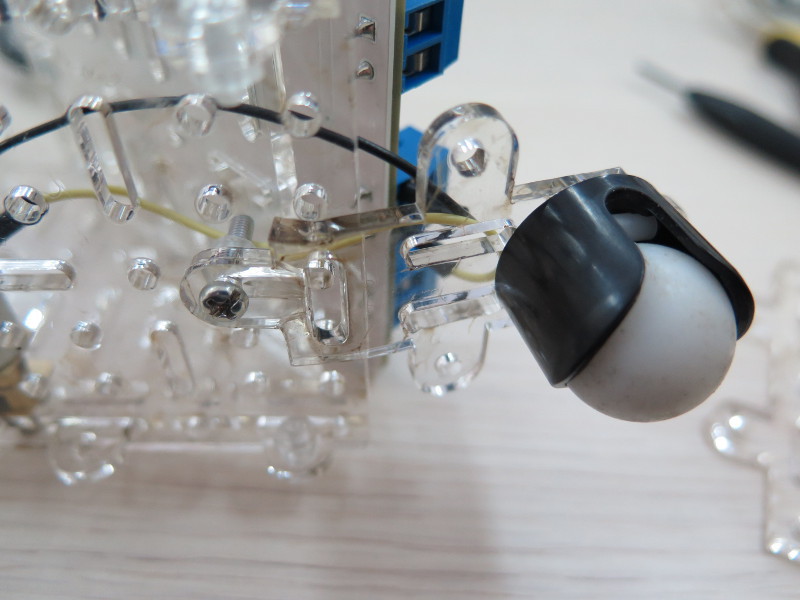
Из-за слишком высокого центра тяжести остойчивость оставляла желать лучшего. Ситуацию сильно ухудшала высокая шариковая опора. Её крепление пришлось подправить зажигалкой.
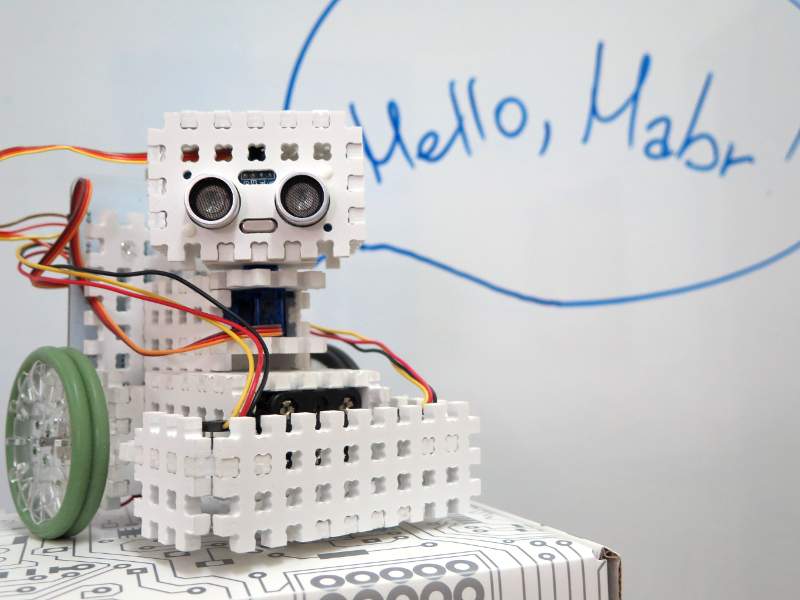
После непродолжительных тестовых испытаний решили от акрила отказаться. В основном потому, что нашелся очень интересный материал с КДПВ, о котором расскажу в следующих частях. Кстати. Название для этого конструктора ещё не придумано, поэтому идеи приветствуются).
Существуют достаточно распространённые у самодельщиков методы соединения оргстекла или фанеры без использования уголков. Например, язычки Тентона, или Т-образное соединение. Так как мы хотели в итоге получить всё-таки конструктор для сборки разнообразных роботов, эти методы не подходили. На мой взгляд, они не очень удобны для частой сборки-разборки.
UPD. Наконец-то вышло продолжение. Как мы придумывали конструктор для детской робототехники. #1
Казалось бы — выбирай не хочу! Но на детских соревнованиях по робототехнике мы неизменно видим одно и то же. С одной стороны стенды со стройными рядами Lego-роботов. С другой стороны акриловые блины с деталями из советского конструктора, синей изолентой, подручными средствами и палками на базе Arduino. А ещё у них есть один фатальный недостаток.
«Хватит это терпеть» — подумали мы, и запилили свой конструктор, с Arduino и доступным конструктивом.

Идея
Мы уже больше года выпускаем мозг для роботов «Strela». Моторчики, сервоприводы и датчики у нас тоже есть. Для полного счастья не хватало только конструктива, который позволял бы соединять это всё в элегантного робота. После некоторых дебатов, длившихся всего-то около года, было принято решение: «Роботу — быть!».
При этом хотелось, что бы из одних и тех же деталей можно было собирать разных роботов. А то грустно смотреть на соревнования одинаковых блиноботов на Arduino. В общем, идею изобрести очередной акриловый «блин» с удовольствием отмели.
Идея была следующей: нам нужен конструктор. То есть какой-то набор деталей, из которых можно что-то собрать. Первоначальная идея конструктора была примерно такой: должен существовать какой-то конструктив, имеющий какое-то стандартное крепление. Должны существовать интерфейсные модули, к которым прикрепляются разные устройства. Это могут быть моторы, датчики, батарейные отсеки, сервоприводы, микроконтроллерные платы — да что угодно! Интерфейсные модули должны позволять простым способом соединять все эти устройства между собой при помощи стандартного крепления. Комбинируя различные интерфейсные модули разными способами можно получить разных роботов. Примерно так же всё работает и у Lego.
Очень хотелось сохранить совместимость интерфейсных модулей с советским металлическим конструктором. Этот конструктор всё ещё производится, он очень надёжен, дешёв, широко распространён, и поэтому массово используется при постройке arduino-роботов.
Нам очень хотелось, что бы у каждого роботостроителя была возможность сделать самостоятельно любую деталь, даже свою собственную. Где бы он не находился. Поэтому литьё, 3D-печать и штамповка из металла тоже отпадают. Нужно было искать что-то, что можно сделать в любой мастерской по производству наружной рекламы. Такие мастерские есть почти в каждом городе. Из этих соображений мы и плясали при выборе материалов и способа производства.
Что бы это такое могло быть?
Акрил
Первое что приходит в голову — конечно акрил. Отдаёшь чертёж рекламщикам и получаешь готовые детали. Резка из акрила — это очень просто. Начертил деталь в любом 2D редакторе, отдал рекламщикам — получил деталь. Красота!
Попытка №1
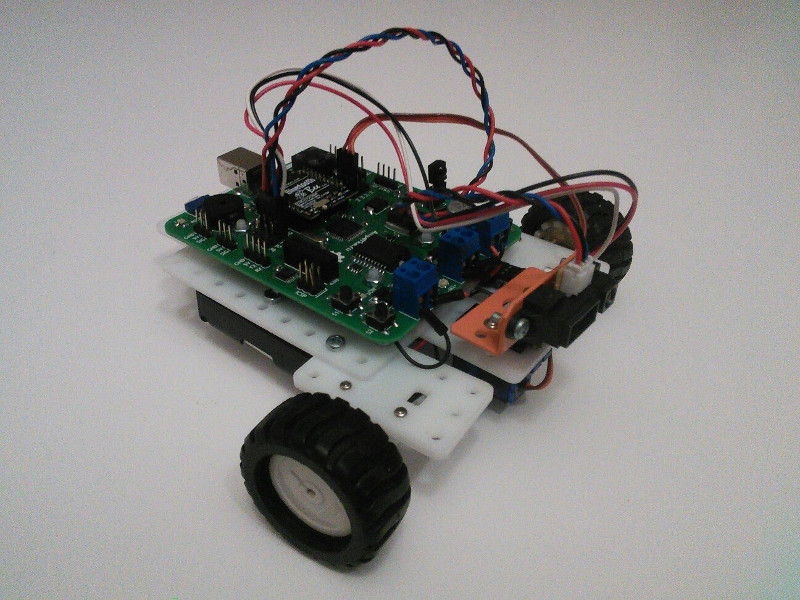
Наш главный евангелист детской робототехники Алексей Перепёлкин в одиночку продумал и начертил набор интерфейсных модулей для производства из акрила. Получилось вот так:

Исследователь

Ездок по линии
Ездок по линии в естественной среде обитания
Хоть роботы и получались вариативными, но чего-то не хватало. Все детали соединялись между собой исключительно пластиковыми стоечками или винтами М3. Поэтому в итоге получилась такая реинкарнация акрилового блина, но только вытянутого в третьем измерении костылём в виде стоечек. Это как с трёхмерностью в Wolfenstein 3D — круто, но чего-то не хватает! Модули не получится ставить боком без привлечения некоторой дополнительной сущности. Этой сущностью могли быть алюминиевые уголки. Примерно так и сделано в Multiplo.
Плюсы: отверстия под винты по квадратной сетке со стороной 1 см. Полная совместимость с советским конструктором:)
Но уголки для своего робота мы использовать не могли. Хоть руководитель кружка и может легко достать их из советского конструктора, но для нас это всё равно костыль, который обернулся бы лишними заморочками при производстве. И этот уголок нельзя изготовить в любой наружно-рекламной мастерской. Думаем дальше.
Попытка №2
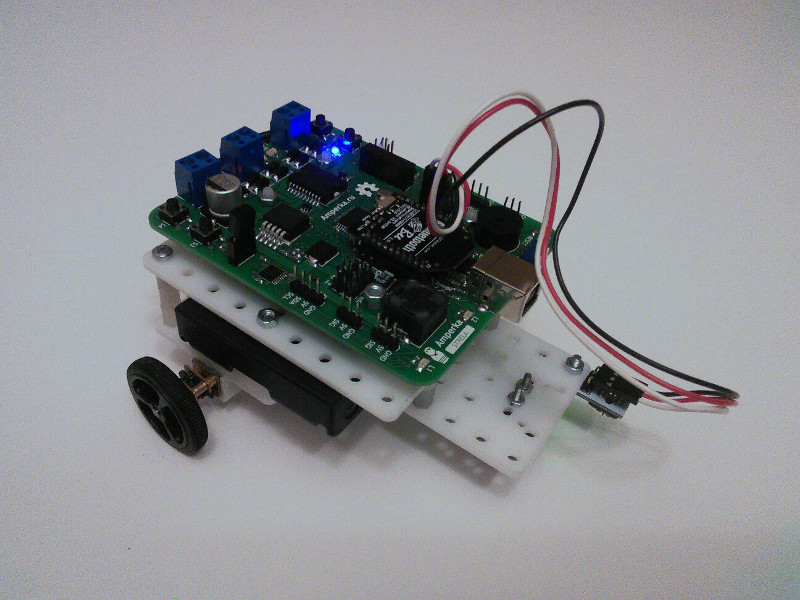
Я попробовал немного видоизменить акриловую концепцию, добавив к ней возможность соединения пластин акрила под прямым углом при помощи специальных ушек и тех же пластиковых стоечек.

Угловое соединение стоечками
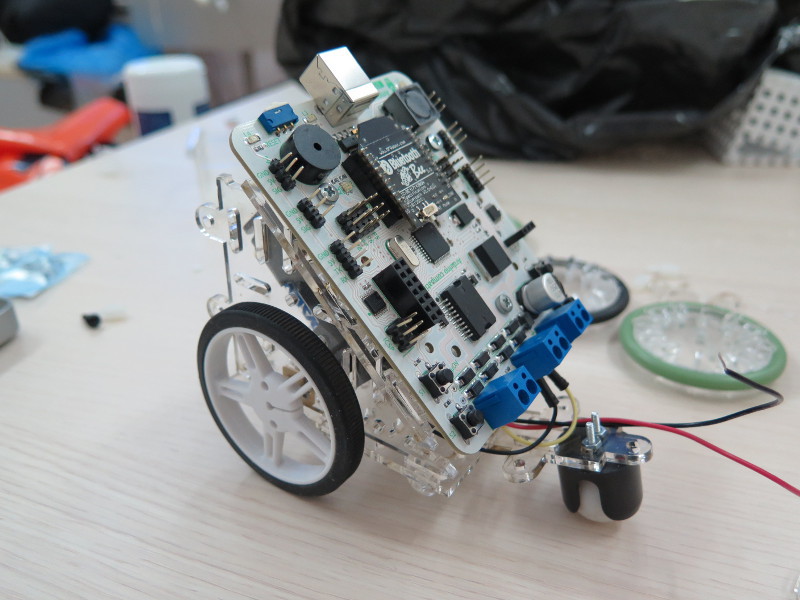
За одно попробовал грубой силой вместить робота в стандарты мини сумо, утрамбовав его до размеров 10x10 см. Проблема в том, что сама плата Strela длиннее 10 см. Получилось, но итоговый концепт-бот мне не понравился.

Робот класса «Утюг»

«Утюг», вид сзади
Из-за слишком высокого центра тяжести остойчивость оставляла желать лучшего. Ситуацию сильно ухудшала высокая шариковая опора. Её крепление пришлось подправить зажигалкой.

fix it!!
Тестовый запуск «Утюга»
После непродолжительных тестовых испытаний решили от акрила отказаться. В основном потому, что нашелся очень интересный материал с КДПВ, о котором расскажу в следующих частях. Кстати. Название для этого конструктора ещё не придумано, поэтому идеи приветствуются).
Напоследок об уголковом соединении акрила
Существуют достаточно распространённые у самодельщиков методы соединения оргстекла или фанеры без использования уголков. Например, язычки Тентона, или Т-образное соединение. Так как мы хотели в итоге получить всё-таки конструктор для сборки разнообразных роботов, эти методы не подходили. На мой взгляд, они не очень удобны для частой сборки-разборки.
UPD. Наконец-то вышло продолжение. Как мы придумывали конструктор для детской робототехники. #1
Комментарии (9)

jaiprakash
19.04.2015 15:42нашелся очень интересный материал
Неужто вспененный ПВХ, у рекламщиков он «на все случаи жизни», кроме прозрачных и нагруженных случаев.
ProLimit
19.04.2015 20:22Хороший материал, держу под рукой несколько листов разной толщины, если надо что-то вырезать на коленке для монтажа DIY-электроники. Режется канцелярским ножом по линейке, сверлится чуть ли не отверткой.


divan15
20.04.2015 09:13«Если бы терминатора делали в России, он бы был сварен из уголков» (с) бородатый анекдот. Так чем же они так плохи, уголки эти? Продаются везде, заказать можно поди тоже.

acos Автор
20.04.2015 19:28Можно было бы наверное как-то выкрутиться. Но тогда бы мы делали ещё одного акрилового бота. Сейчас же мы делаем нечто уникальное, и этот процесс очень радует.
ivanych
Что так мало? Интересно же!
acos Автор
Будет. Последние три месяца были очень насыщенные, поэтому есть, что рассказать. Осталось только написать