

Группа в составе робототехников из компании Disney Research и приглашенных специалистов – энтузиастов создали робота с гидростатическими приводами нового поколения, позволяющими удивительно точно и плавно имитировать движения человека. Инновационные приводы объединяющие в конструкции пневматические и гидравлические элементы способны обеспечить движениям робота значительно большую точность движений, возможность деликатного захвата и удержания хрупких предметов.
Существует два основных типа двигательных систем, поддерживающих двигательную активность робота – пневматическая и гидравлическая. Каждая из них располагает своими уникальными преимуществами, но и сталкивается с рядом технических ограничений, определяющих, в конечном счете, уровень обратной связи и контроля движений, совершаемых роботом.
Так гидравлические системы наделяют любую машину Геркулесовой силой, обеспечивают достаточно высокую точность движений и предоставляют возможности для реализации и гибкой настройки обратных связей. Вместе с тем, такие системы некомпактны и тяжеловесны, на 100% зависят от внешних источников питания. Простая и надежная пневматическая система не предполагает наличие внешнего источника питания, но накладывает достаточно серьезные ограничения при компоновке кабельных трасс и моторов, демонстрирует низкое качество обратной связи и дает минимум возможностей для контроля. Электрические системы по уровню раскрываемых возможностей занимают промежуточное положение.
Группа исследователей Disney Research, создавшая гибридный привод, уже достаточно хорошо знакома профессиональному сообществу по созданию роботов, использующих самые современные технологии, включая Microsoft Kinect, Xtion Pro Live от ASUS и др. Своего робота, ловко перебрасывающегося с человеком мячиками инженеры компании представили еще в 2012 году.
Другой пример — робот японских инженеров, способный точно и быстро жонглировать одной рукой, продемонстрированный разработчиками на Международной конференции IEEE 2012 года по вопросам робототехники и автоматизации (2012 IEEE International Conference on Robotics and Automation, ICRA).
Теперь группа инженеров Disney Research под руководством Джона П. Уитни (John P. Whitney) из Северо-восточного университета разработала конструкцию уникального гидравлико-пневматического привода, вобравшего достоинства систем пневматики и гидравлики, используемых до сих пор раздельно. В новом приводе вместо суставов, полностью управляемых парой гидравлических клапанов, движение в заданном направлении осуществляет гидравлика, а возврат в исходное положение – пневматика. Такое решение позволило существенно упростить конструкцию привода, а использование возможностей пневматики, выступающей в качестве дополнительного демпфера — обеспечить движениям повышенную плавность и естественность.
В предложенном инженерами гибридном приводе использован единственный двигатель, гидравлическая система значительно облегчена. В итоге вся конструкция получилась быстрой, легкой и точной. Еще одно достоинство предложенной гибридной системы в сравнении с роботизированными комплексами, работающими на чистой гидравлике – отсутствие жесткой зависимости от электропитания. Остаточный запас сжатого воздуха пневматической части системы может совершать некоторый ограниченный объем полезной работы. Так робот-хирург с подобными приводами на случай выхода из строя питающего лабораторного комплекса окажется в состоянии вернуть руку с инструментом в исходное положение, освободив доступ к телу пациента хирургу-человеку.
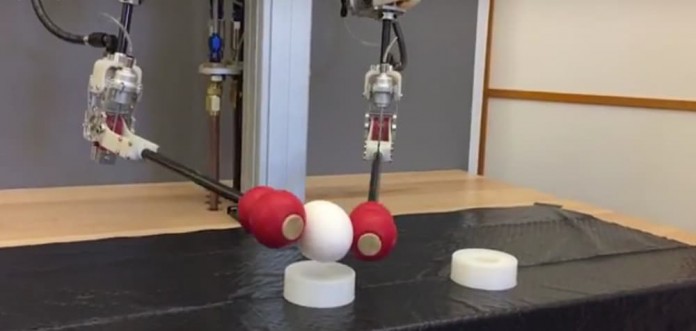
Для стендовых испытаний инженеры приготовили простейший прототип гибридной системы без нижних конечностей. Верхняя часть гуманоидного робота располагает двумя манипуляторами с четырьмя степенями свободы на каждый. На голове робота установлены миниатюрные стереоскопические камеры, обеспечивающих роботу возможность визуального контакта с окружением, а в случае перехода в режим дистанционного управления – возможность передачи картинки реальности человеку оператору.
Дистанционное управление роботом становится возможным благодаря специальным ручным контроллерам, обеспечивающим возможность обратной связи. Одев шлем виртуальной реальности оператор, таким образом, “стирает грань” между собой и роботом. Последний в этом случае точно повторяет движения человека, а человек видит все что происходит перед камерой-глазом робота. Точность повтора движений и разрешающая способность обратной связи такова, что человек, оперируя руками робота окажется способен вдеть нитку в ушко иголки и совершить подобные сверхточные манипуляции. При этом скорости движения, быстроты реакции и уровня координации будет достаточно, чтобы совершить и скоростные манипуляции – поймать брошенный мяч и др.

«Новые гибридные привода придают роботу невероятную плавность и быстроту движений, позволяя ему манипулировать хрупкими предметами, взаимодействовать с людьми или животными, и выполнять очень тонкие операции» — рассказывает Джессика Ходджинс (Jessica Hodgins), вице-президент Disney Research и профессор робототехники университета Карнеги-Мелоун, — «Сейчас робот может работать только при помощи дистанционного управления. Но он может, сохраняя все параметры механического движения, действовать в автоматическом режиме. И работы в данном направлении уже ведутся нашими специалистами».
Более подробно с информацией о новых гибридных приводах, их характеристиках и перспективах использования в робототехнике разработчики намерены рассказать в рамках Международной конференции IEEE по проблемам робототехники и автоматизации ICRA 2016 (IEEE Conference on Robotics and Automation) в Стокгольме.
Источник
На этом всё, с вами был простой сервис для выбора сложной техники Dronk.Ru. Не забывайте подписываться на наш блог, будет ещё много интересного…

Комментарии (14)

edd_k
01.06.2016 11:08Кстати, в обсуждениях непривычных движений роботов я лично особо не задумывался о том, позволяют ли приводы делать иначе. А оказывается, это может быть ключевой проблемой и объяснять, почему тот же Атлас ходит как калека, хоть и удерживает равновесие, а симпатичные «девушки» обладают мимикой явно душевно не здоровых.

frog
01.06.2016 16:02+2В случае с Атласом этот эффект в первую очередь из-за меньшего количества подвижных сочленений по сравнению с человеком. Поэтому как бы он не совершал движения пользуясь имеющимися суставами, всё равно будет ощущение, что у него частичный паралич.

Seven-ov
01.06.2016 11:43Хм, а если использовать не два отдельных цилиндра, а только гидравлический, но в этом самом гидравлическом цилиндре сделать отток к газовой камере с диафрагмой. Давление газа в камере будет устанавливать необходимый уровень демпфирования гидравлической жидкости.
В итоге мы получим эффект гидравлической жидкости со степенью сжатия, причем изменяемой и измеряемой. Таким гидравлическим приводом можно будет и цветочек сорвать и орех раздавить.
Alexeyslav
01.06.2016 13:45+1По опыту могу сказать что малейший пузырёк воздуха в гидролинии сводит на нет её качества. А вы хотите целую камеру! Да там одного кубического миллиметра может быть уже много, а как обеспечить управление давлением в такой камере, чтобы еще не смешаться с жидкостью? В каком месте гидролинии поместить этот объём? Что делать при естественных изменениях давления в самой линии при естественном движении жидкости? Тогда уж просто расширяющийся пружинящий бак, управляя например жесткостью трубки-отвода такого бака можно изменять коэффициент демпфирования, но это всё сложные ненадёжные системы.
Seven-ov
01.06.2016 14:06Вы не поняли, газ от жидкости отделить мембраной, конечно нельзя смешивать различные рабочие тела…
как-то так: https://fotki.yandex.ru/next/users/seven-ov/album/120414/view/1548481Alexeyslav
01.06.2016 17:06Угу, и внезапно оказывается что эта мембрана должна быть одновременно гибкой, подвижной и выдерживать огромные давления. Кроме того нужно обеспечить её герметичность и т.д.
Jamato
01.06.2016 18:27Стальной поршень в стальном цилиндре. Подвижный, продавить не получится. Разве что сальники хорошие нужны.
Seven-ov
01.06.2016 22:26Совершенно внезапно такое устройство уже существует и много лет используется в системах водоснабжения, а так же в гидравлических системах строительных машин. Называется оно гидроаккумулятор!
Ну а для действительно высоких уровней давления на нарисованном мною эскизе есть кран, перекрывающий гидроаккумулятор.

hdfan2
01.06.2016 12:06Ну ни фига себе. Я один думал, Дисней только мультики да фильмы снимает? А они вон чего пилят. Ещё один кандидат в Скайнет.

mukizu
01.06.2016 12:42+2По-моему должно быть очевидно, что они и всякими аттракционами еще занимаются. Там и робототехника само собой.

Crazybot
07.06.2016 12:38У них там нефиговое такое R&D. В том числе программное и аппаратное. Все для продвижения индустрии развлечений :)
zim32
Ну почему он так жутко улыбается
Kanut79
Видимо потому что знает что-то, чего не знаем мы. Даже предположу что это «что-то» из серии «Слава Роботам! Убить всех человеков!» :)
anlopan
Потому что он устарел