
История этого проекта начинается в 2014 году, когда я учился на 4-м курсе в ведущем техническом вузе России на кафедре «Робототехнические системы». В это время я уже начал задумываться над темой диплома и искал проект, который был бы интересен мне, и при этом в нем присутствовала некоторая новизна. И вот однажды, увидев видео шаробота Rezero, я захотел попробовать повторить успех. Кому интересно, что из этого получилось — прошу под кат.

Введение
В начале хотелось бы поговорить о достоинствах шаробота. Благодаря единственной точке контакта с поверхностью, шаробот одинаково легко передвигается во всех направлениях, являясь чрезвычайно подвижным и манёвренным, по сравнению с обычными колесными роботами. Манёвренность шаробота ограничена только его динамикой, в отличие от механических ограничений, налагаемых колёсами (например, невозможность движения боком).
Следующее важное достоинство — робот может быть высоким, и чем выше он будет, тем он будет устойчивее. Почему устойчивее? Это видно из уравнения динамики обратного маятника. Ускорение отклонения от вертикального положения равновесия обратно-пропорционально расстоянию до центра масс, т.е. более высокий обратный маятник будет медленнее падать. Это снижает требования к скорости реакции системы управления, но, возможно, увеличивает момент, который должны развивать привода.
Еще одно преимущество — он может ездить по наклонным и подвижным поверхностям, например, палуба корабля или пол самолета при взлете. Да и согласитесь, движется он гораздо красивее, чем обычные колесные роботы.
Один из главных недостатков шаробота — возможность потери вертикального положения равновесия. Но лично я думаю, что это вполне решаемая инженерная задача. Инженеры роботов Aido и Mobi решили ее следующим образом: при превышении некоторого угла отклонения выдвигаются “ноги”, чтобы робот не потерял устойчивость.
Мой рассказ состоит из следующих частей:
— Математическая модель
— Разработка алгоритмов управления
— Конструкция
— Аппаратно-программное обеспечение
— Результаты
1 Математическая модель
Вывод уравнений движения необходим для дальнейшего синтеза управления и моделирования движения. В этом разделе будет немного математики и механики.
На данный момент все существующие математические модели шаробота составлены с учетом некоторых упрощений с помощью уравнений Лагранжа 2-го рода. А так как шаробот является неголономной механической системой, то применять уравнения Лагранжа 2-го рода к такой систему некорректно. В роботе CMU модель шаробота рассматривается как три независимые плоские модели, тем самым не учитывается взаимовлияние этих моделей. В Rezero разработали трехмерную математическую модель, в которой не учитываются гироскопические эффекты, возникающие при вращении омниколес.
Я поставил цель создать наиболее полную математическую модель робота с минимальным количеством допущений. В достижении этой цели мне помог мой научный руководитель С.Л. Крутиков, за что я выражаю ему огромную благодарность.
1.1 Кинематика
Для кинематического описания системы я ввел подвижные системы координат, показанные на рисунке.
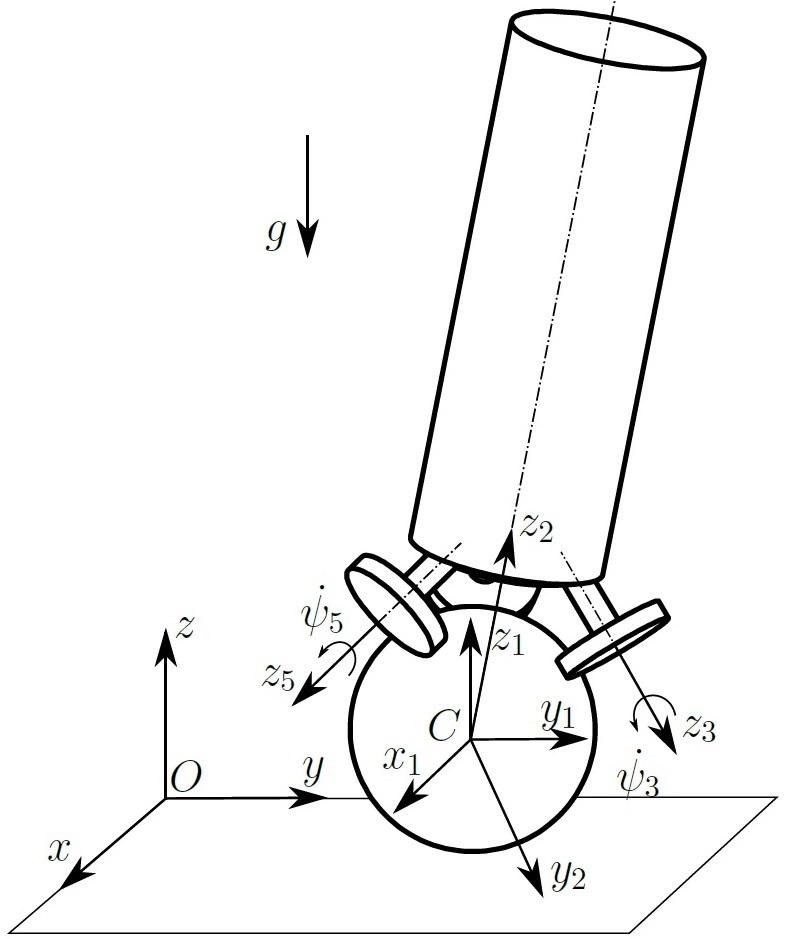
Инерциальная система координат обозначена как . Система координат
находится в центре шара. Для перехода от инерциальной системы отсчёта к центру шара используется следующая однородная матрица:
где и
смещение центра шара вдоль оси
и
соответственно.
Для описания вращения шара удобно использовать кардановы углы или углы Tait–Bryan. Таким образом, система координат , связанная с шаром, получается путем поворота
на углы
,
и
вокруг осей
и
соответственно. Данную последовательность поворотов можно представить в виде произведения матриц поворота:
Аналогично можно описать вращение тела шаробота в пространстве. Система координат 2-го звена, связанная с телом, получается путем поворота
на углы
,
и
вокруг осей
и
соответственно. Данную последовательность поворотов также можно представить в виде произведения матриц поворота:
3-я, 4-ая и 5-ая системы координат связаны с омниколесами. Чтобы перейти от системы координат тела к системе координат омниколеса требуется выполнить ряд элементарных преобразований(два поворота, перенос, затем опять поворот), я не буду их описывать здесь.
Последовательность переходов представлена в виде следующего кинематического графа:

Для описания положения системы используется следующий вектор обобщенных координат:
где — координаты центра шара,
— кардановы углы, описывающие вращение шара и тела соответственно,
— углы поворота омниколеса вокруг оси двигателя.
1.2 Динамика
Исходя из неголономности системы было принято решение использовать уравнения Аппеля для составления дифференциальных уравнений движения шаробота.
На систему наложено 6 неголономных связей: три связи качения омниколес по шару, две связи для скорости центра шара и одна связь отсутствия верчения шара. Таким образом, число обобщенных координат m=11, число связей s=6, а число степеней свободы n=5. Будем использовать следующий вектор псевдоскоростей:
Для составления уравнений движения необходимо вычислить энергию ускорений для каждого звена:
где — количество звеньев,
— матрица перехода от инерциальной системы координат к системе координат
-го звена,
— матрица инерции
-го звена, а
— след матрицы. В общем случае
является функцией от
. С помощью уравнений связи энергия ускорений сводится к функции, зависящей только от
.
Матрица инерции шара имеет диагональный вид, т.к. оси системы координат являются главными центральными осями инерции:
Т.к. плоскости и
являются плоскостями симметрии тела, центробежные моменты инерции
и
равны нулю. Матрица инерции тела будет иметь следующий вид:
где – расстояние от центра шара до центра масс тела вдоль оси
.
Матрица инерции омниколес имеет диагональный вид, т.к. оси системы координат омниколеса образуют плоскости симметрии:
В приведенном моменте инерции необходимо также учесть момент инерции ротора двигателя:
где – передаточное число редуктора.
Дифференциальное уравнение движения Аппеля в псевдокоординатах:
где – обобщенная сила от моментов приводов,
– обобщенная сила от сил тяжести.
Записываем уравнения Аппеля в матричной форме и решаем относительно :
Уравнения движения можно записать в матричной форме
где
Все вычисления выполнялись символьно с помощью Maple. Затем полученные уравнения были перенесены из Maple в Matlab для моделирования.
2 Разработка алгоритмов управления
Еще немного теории управления и матчасть на этом закончится. В теории управления хорошо развиты методы анализа линейных систем. Для вполне наблюдаемых систем наиболее часто применяется оптимальное управление с квадратичным функционалом(линейно-квадратичный регулятор, LQR), которое гарантирует стабилизацию системы в случае, если система вполне управляема. Шаробот является вполне наблюдаемой системой, т.к. вектор состояния может быть полностью измерен. Вычислив ранг матрицы управляемости, я также убедился в управляемости системы.
Для получения линейно-квадратичного регулятора в начале необходимо линеаризовать систему в окрестности вертикального положения неустойчивого равновесия
Вектор — вектор состояния или фазовый вектор,
— вектор измерения и
— управление(моменты приводов).
LQR регулятор имеет следующий критерий оптимальности:
где и
— положительно определённая матрица. Задача минимизации данного функционала сводится к решению матричного алгебраического уравнения Риккати:
Для линейно-квадратичного регулятора управление записывается в виде , где
,
– решение уравнения Риккати. В итоге мы имеет матрицу коэффициентов обратной связи:
При умножении данной матрицы на вектор состояния мы получим три момента, которые необходимо подать на двигатели для стабилизации системы. LQR является PD регулятором, в случае если вектор состояния состоит из координат и их производных. Как вы понимаете, использовать обычный PID регулятор и подбирать коэффициенты вручную в такой системе почти невозможно.
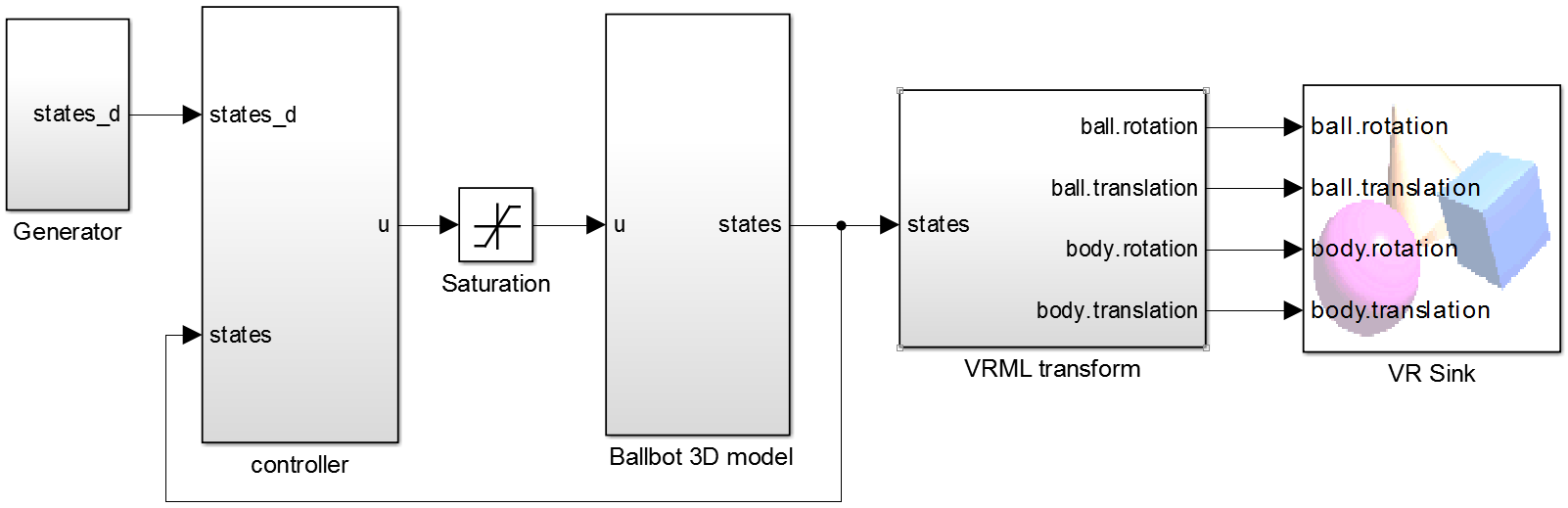
Дам небольшие пояснения к каждому блоку. В блоке «Ballbot 3D model» реализованы уравнения Аппеля. На вход подается управление (три момента), на выходе получается вектор состояния
(см. п.2).
Блок «VRML transform» преобразует вектор состояния в координаты для визуализации. «VR Sink» содержит модель в формате vrml и именно этот блок отрисовывает графику.
На вход блоку «controller» подается вектор состояния и желаемый вектор состояния
, с помощью которого можно задавать траекторию движения и скорость. Блок производит элементарное уможножение матриц для получения трех моментов
.
Так как момент, который развивают привода, ограничен, я добавил звено насыщения(saturation).
Для трехмерной визуализации была сделана простая модель шаробота в SolidWorks. Затем она была экспортирована в формате vrml и добавлена в блок VR Sink.

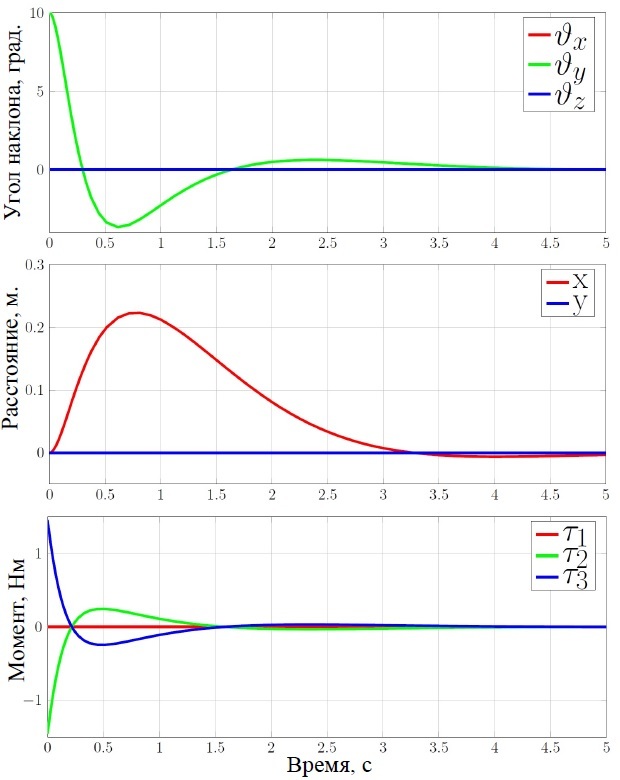
Результаты моделирования при начальном отклонении в 10 градусов
3 Конструкция
Конструкция робота разработана в CAD системе Siemens NX. На основании построенной модели были определены массовые и инерционные характеристики звеньев робота.

Конструкция состоит из двух алюминиевых оснований. На нижнем основании закреплены три двигателя, которые приводят в движение омниколеса. Верхнее основание крепится к нижнему с помощью амортизаторов и направляющих. Задача амортизаторов заключалась в уменьшении вибраций верхней части корпуса, где находится вся электроника, правда на практике это не помогло.
Полки сделаны из оргстекла для облегчения конструкции. На них располагается вся бортовая электроника: аккумулятор, контроллеры приводов, микроконтроллер, инерциалка и др.
В качестве шара используется баскетбольный мяч диаметром 240 мм. Держатели шара прижимают его к омниколесам, тем самым увеличивают трение. К сожалению, их не получилось изготовить, так как на нашей кафедре нет 3D принтера, а печатать на заказ дорого, т.к. они не маленькие и коэффициент заполнения нужен большой для прочности.
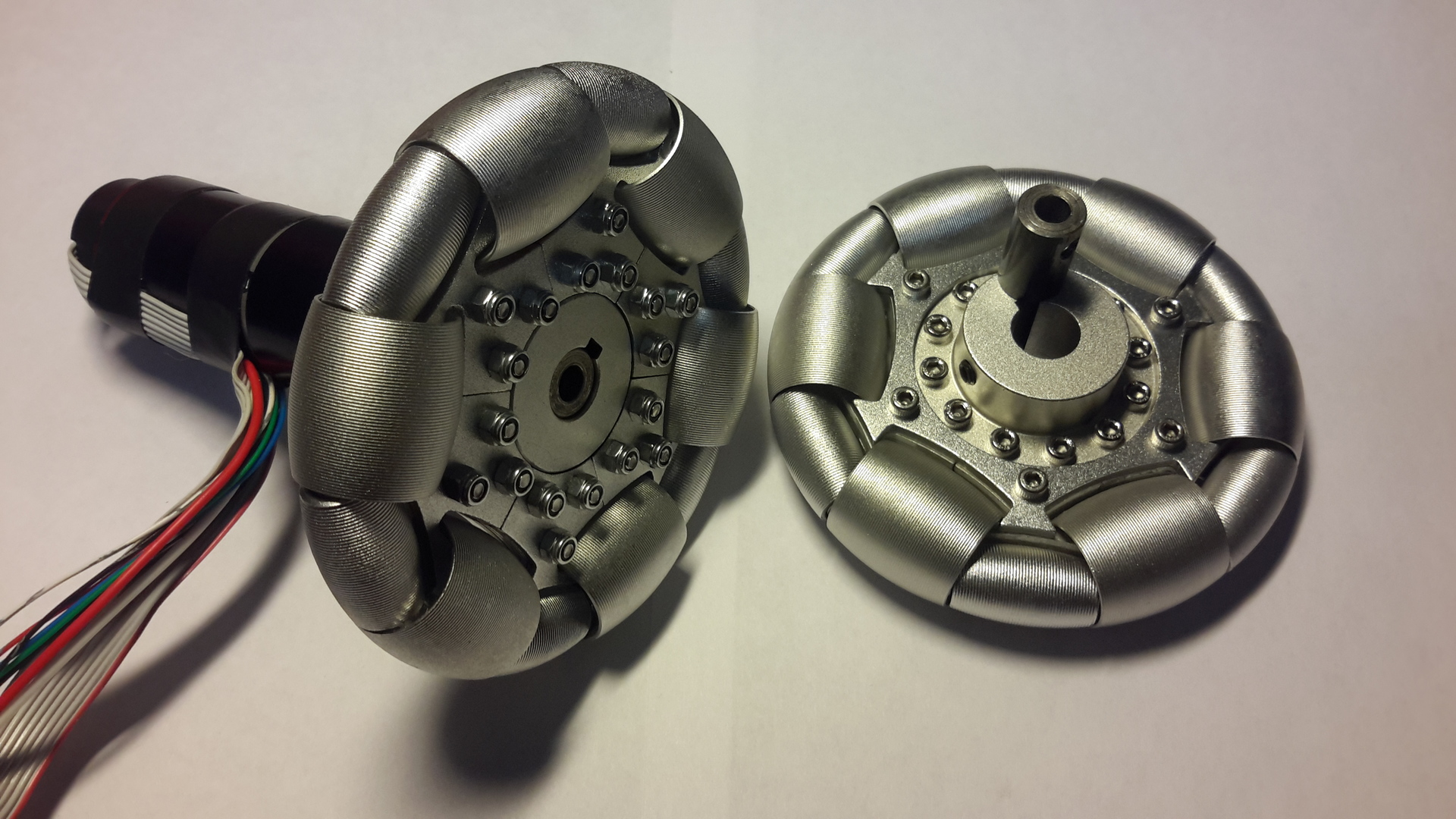
Омниколеса были приобретены на Aliexpress по 120$ за штуку. Самая дорогая часть робота, после приводов, конечно.
Все металлические детали изготовлены из дюралюминия на заказ на одном московском заводе. На этом же заводе нам сделали полки из оргстекла. Заказ вышел на сумму 30 000р, примерно.
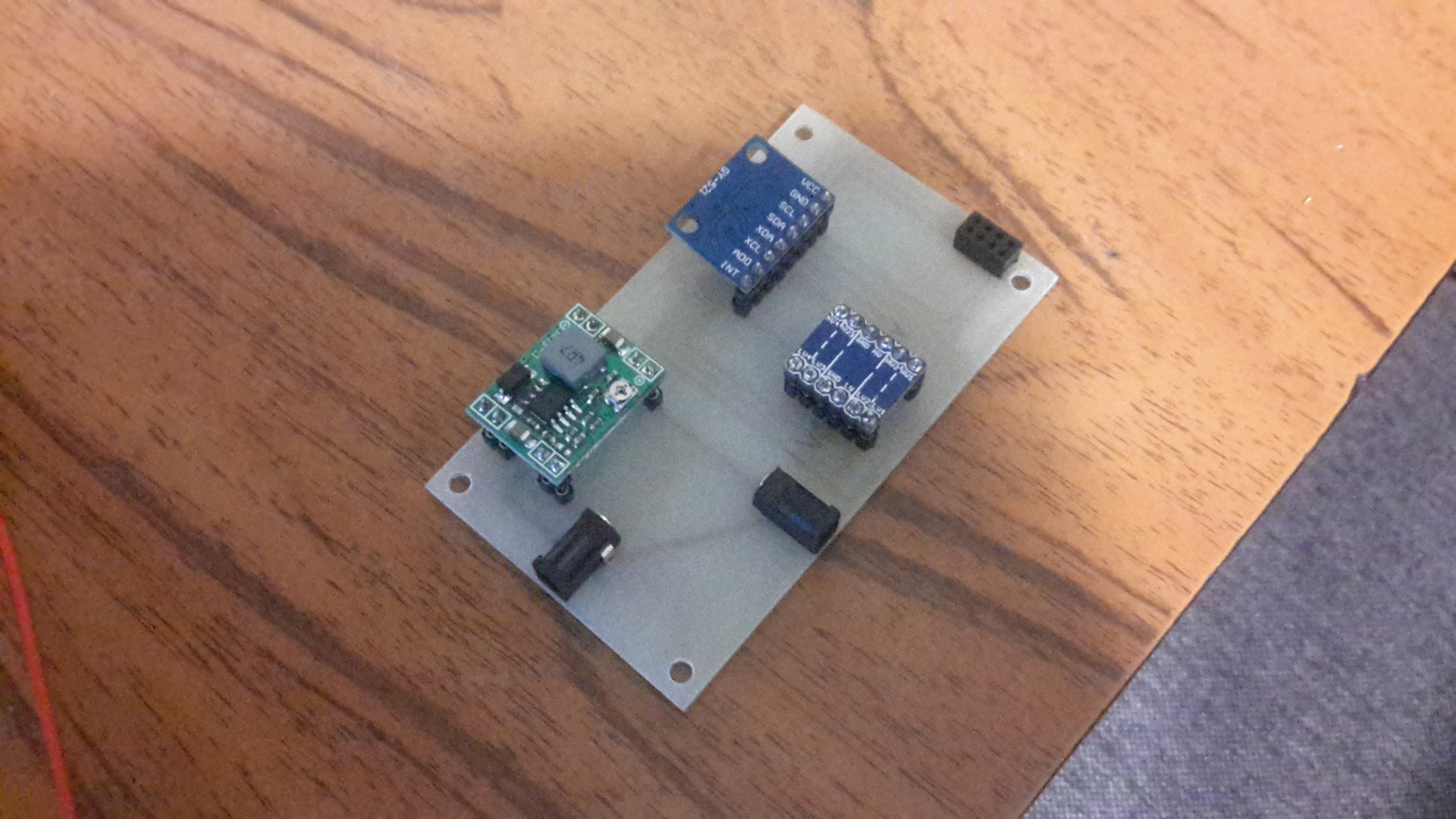
Друг помог мне развести плату, на которой находятся DC-DC преобразователь, IMU и логический преобразователь уровней для I2C. Сверху втыкается ODROID

Это самый первый вариант конструкции с приводами Dynamixel MX64. Коробки для приводов напечатаны.
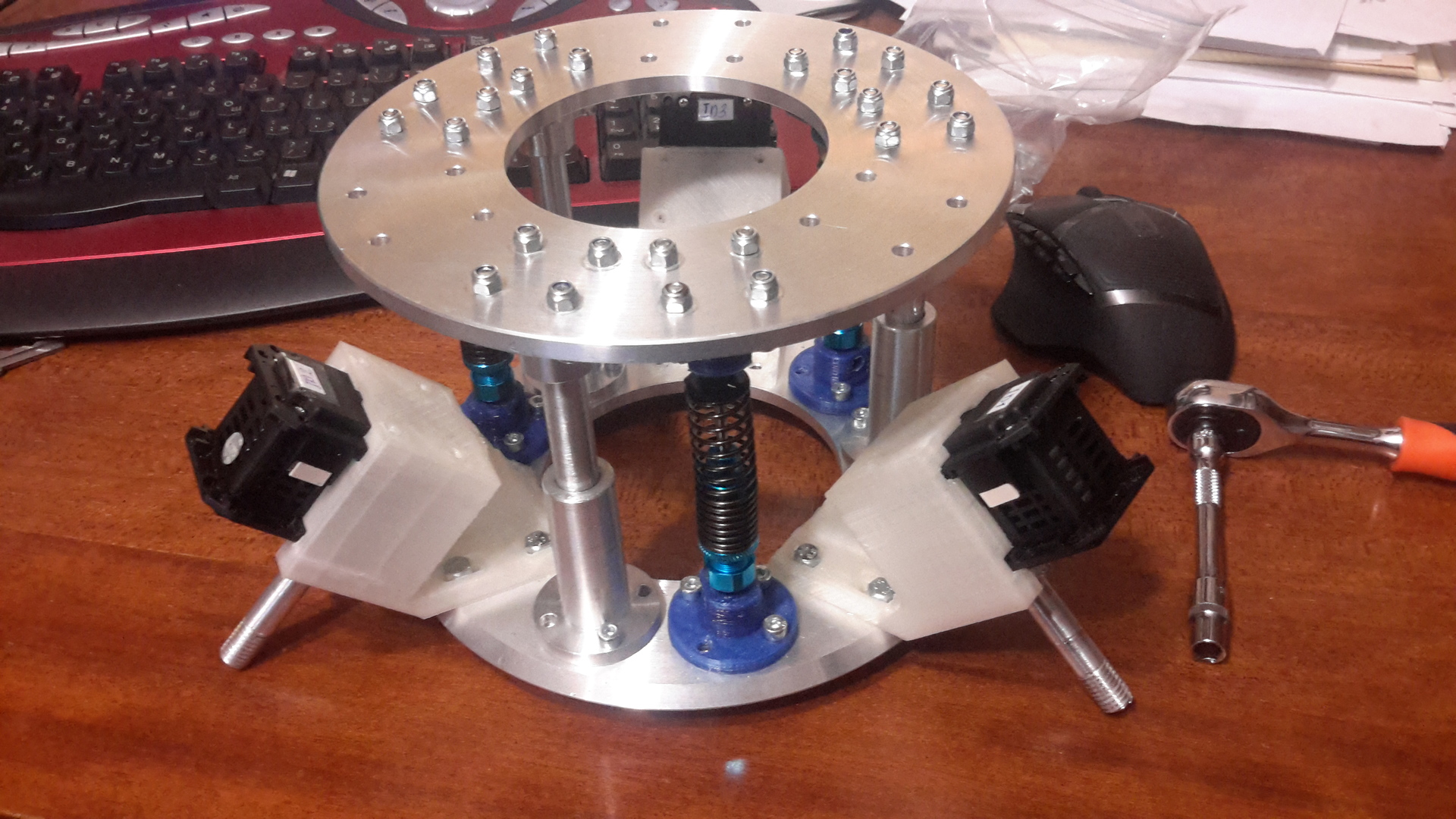
Амортизаторы фирмы HSP для радиоуправляемых моделей с масштабом 1:10.

В таком виде я получил комплект приводов и контроллеров.

Чтобы надеть омниколесо на вал двигателя пришлось вытачивать втулку.
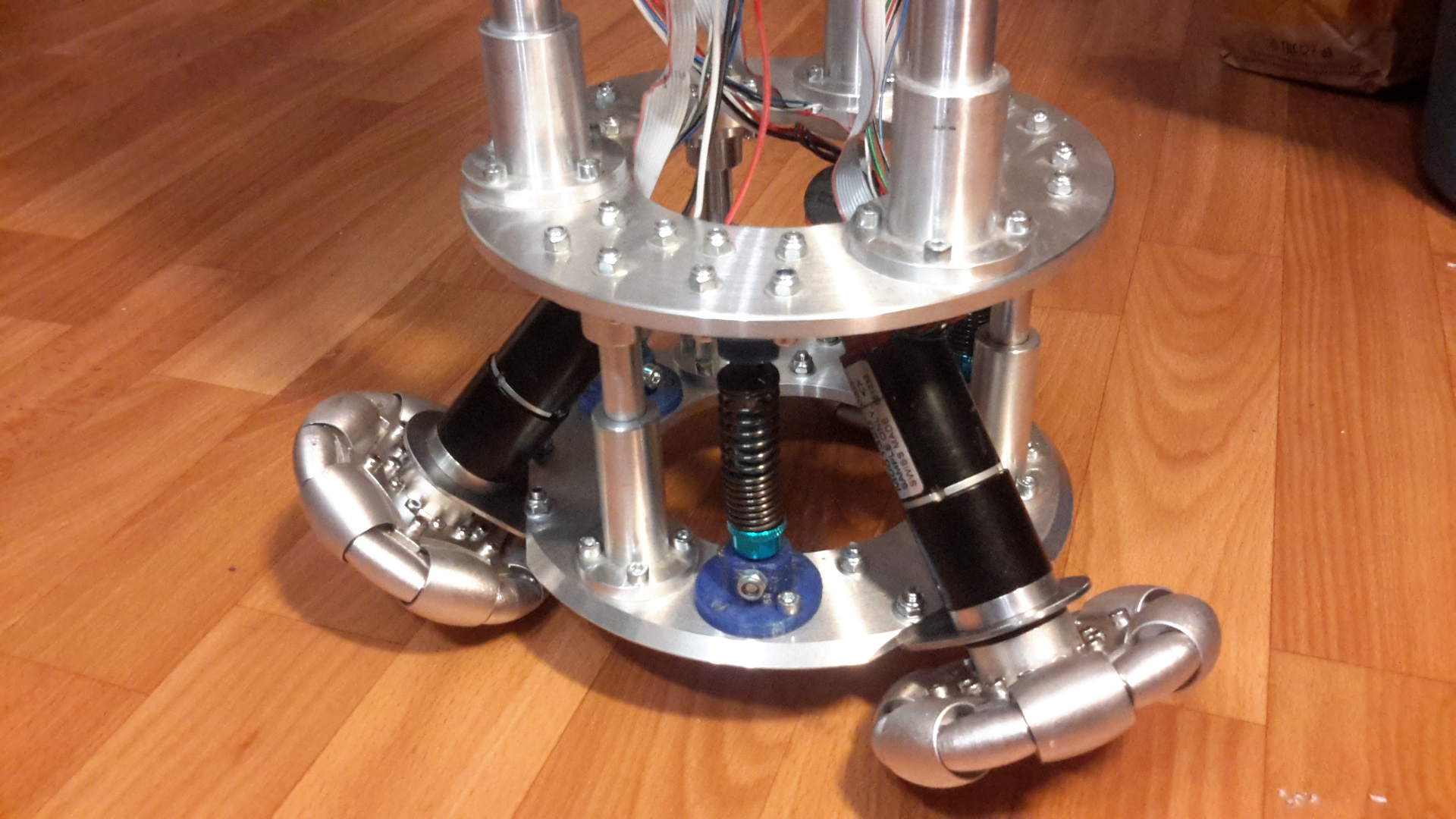
Это уже финальный результат.
4 Аппаратно-программное обеспечение
Почти все аппаратные компоненты шаробота представлены на функциональной схеме. Скажу пару слов про каждый элемент, двигаясь "снизу вверх".

4.1 Привода и контроллеры приводов
Всех сложнее было найти привода и контроллеры приводов. На выходе LQR регулятора у нас момент, следовательно надо иметь контроллер с возможностью управления по току(т.е. по моменту). Видимо, эта задача встречается очень редко в повседневной жизни, и я нашел только одно доступное по деньгам решение — Dynamixel. Мы купили и попробовали привода Dynamixel MX64, в которых есть режим управления по току. К сожалению, их быстродействия не хватало для стабилизации робота.
Я уже было потерял надежду на создание реального шаробота, но к счастью мне помог Ярослав из НУЦ "Робототехника" и предоставил на некоторое время три привода Maxon с контроллерами, за что я ему очень благодарен. В итоге у меня оказался бесколлекторный двигатель постоянного тока Maxon EC-max 30 40Вт со следующими характеристиками:
- Номинальное напряжение 24В
- Номинальная скорость вращения 7220 об/c
- Номинальный момент 33.8 мНм
- Удерживающий момент 160 мНм
Планетарный редуктор Maxon GP 32 с передаточным числом n=14 и контроллер привода Maxon EPOS 24/5, который имеет режим управления по току.
Как вы можете заметить, привода не очень мощные и передаточное число маленькое, поэтому момента на выходе едва ли хватает для стабилизации шаробота. У Rezero, например, используются двигатели 200Вт и редуктор с передаточным числом 51.
4.2 Микроконтроллер, инерциальный модуль, трансивер
В качестве микроконтроллера я использовал STM32F4-Discovery, который имеет необходимые нам интерфейсы: CAN, UART и I2C. Он получает данные с гироскопа и акселерометра по I2C и энкодеров по шине CAN. На основе полученных данных рассчитывает управление и отправляет задание на контроллеры приводов по шине CAN. Чтобы не реализовывать протокол для связи с EPOS контроллерами самому, я использовал библиотеку libepos. Для того, чтобы подключить STM'ку к CAN сети необходим приемопередатчик CAN(трансивер) за 4$.
В качестве инерциального модуля я использовал плату GY-521 за 3$ на основе микросхемы MPU6050, которая включает в себя 3-х осевой гироскоп и 3-х осевой акселерометр. Для обработки показаний этих датчиков я использовал фильтр Маджвика, который в последнее время так полюбили коптероводы.
Для упрощения разработки под STM я использовал STM32Cube HAL(hardware abstraction layer).
Частота на которой работает управление равна примерно 300 Гц, т.е. 300 раз в секунду мы считываем показания всех датчиков, рассчитываем управление и отправляем задание на привода. Все это происходит в бесконечном цикле, который можно представить в виде следующего псевдокода:
int main()
{
initialize_imu();/* инициализация IMU по I2C */
initialize_motors(); /* инициализация двигателей по CAN */
while (1) {
read_imu(); /* чтение и фильтрация данных IMU */
get_omniwheels_speed(); /* чтение данных энкодеров по CAN */
/* поступила команда по UART от odroid */
if (uart_rx_flag) {
uart_rx_flag = 0;
struct joystick_data* joystick = (struct joystick_data*)UARTdev_Get_RX_buf();
process_joystick_input(joystick);
}
calculate_control(); /* вычисление управления */
set_torque(); /* отправка задания на привода по CAN */
}
}4.3 Одноплатный компьютер, аккумулятор, DC-DC преобразователь, джойстик
Бортовой одноплатный компьютер ODROID U3 принимает данные от джойстика через Bluetooth адаптер и передает их на микроконтроллер через UART. На нем установлена операционная система lubuntu c Linux ядром 3.8.13.26-rt31 c поддержкой реального времени.

Свинцово-кислотный аккумулятор Delta 12045 ёмкостью C = 4.5 Ач. Его хватает примерно на час работы.
Напряжение питания одноплатного компьютера Odroid-U3 5В, максимальный потребляемый ток 2А. Т.к. источник питания 12В, необходим понижающий LM2596S DC-DC преобразователь за 2$.

Для управления шароботом используется Bluetooth джойстик Terios. Джойстик передает команды по Bluetooth на ODROID, в котором стоит Asus USB-BT400 адаптер. Для чтения команд джойстика я использовал следующую библиотеку. Поступившая команда парсится, пакуется и отправляется по UART на STM32, где на прием каждого байта происходит прерывание.

Так же к ODROID можно подключится по SSH. При запуске одройд создает Ad-hoc сеть через WiFi адаптер.
Результаты
Итого у меня получилось собрать работающего шаробота и защитить диплом. На реализацию этого проекта у меня ушло ровно 2 года. Скажем так, у меня не получилось приблизиться к результатам Rezero, так как у меня не было таких человеческих и финансовых ресурсов как у студентов из Швейцарии. Думаю, если бы были более мощные двигатели и более продвинутый инерциальный модуль, то результаты были бы на порядок лучше.
Исходный код я не открываю по некоторым причинам. Если хотите знать детали реализации — напишите мне, я с удовольствием поделюсь с вами кодом индивидуально. Двигатели пришлось вернуть и на данный момент "железяка" стоит без них. Возможно, проект будет дальше развиваться студентами, если найдутся подходящие движки и найдутся желающие. Например, было бы интересно разработать нелинейные алгоритмы управления.
Я достаточно поверхностно рассказал про процесс разработки, так что буду рад ответить на ваши вопросы.
Комментарии (51)

Gitkan
26.07.2016 20:29+1Кафедра «Робототехнические системы» — это РК какой номер по старому?

LysanovSergey
26.07.2016 20:31+5Это бывшая кафедра РК-10. Сейчас это — СМ-7.

KlimovDm
27.07.2016 17:57А я помню «роботов» на М-7 :) Т.е. ее перемещали на РК, а потом вернули в СМ?

grigkar
28.07.2016 11:18Мечтал туда попасть при поступлении, но взяли на СМ8, что тоже было не плохо)
aleksandros
26.07.2016 21:57Мегакруто. Жаль, нет видео где он ездит.
LysanovSergey
26.07.2016 22:02В видео есть небольшой фрагмент, как я управляю роботом с помощью джойстика.

Deosis
27.07.2016 09:26+1youtu.be/_hd1qgXshoo?t=74
К сожалению это почти не заметно, и кажется, что робота придерживают рукой.LysanovSergey
27.07.2016 09:28Ездит он не очень уверенно, поэтому я его подстраховываю, держа веревку. Веревка не в натянутом состоянии, так что я ему не помогаю =)

programania
26.07.2016 22:03| шаробот одинаково легко передвигается во всех направлениях,
А в направлении колеса? Ведь тогда шар должен скользить поперек колеса,
а это же большое трение и износ. Да и в любом другом направлении,
в лучшем случае только одно колесо может катиться,
остальные должны проскальзывать, а это трение, износ, потери.
Или я что-то не понял?
И может ли такое устройство стоять неподвижно или
все время хаотично ездит, так что рядом с ним опасно находиться?
evgen
26.07.2016 22:13+1Там не обычное колесо, а омниколесо. У него по окружности колеса маленькие колёса с перпендикулярной осью вращения.
LysanovSergey
26.07.2016 22:16+2Чтобы шар катился, как вы говорите, поперек колеса, существуют омниколеса. В нем нет никакого проскальзывания поперек колеса, только трение качения.
Стоять полностью неподвижно такое «устройство» никогда не сможет, т.к. мы находимся не в сферическом вакууме. Данный шаробот сохраняет равновесие в окружности примерно 5 см при отсутствии внешних воздействующих факторов. Стоять рядом с ним точно не опасно. Если его толкнуть, то, конечно, он поедет.

miragenn
26.07.2016 22:08Я думаю эта технология отлично подойдет для робо столов и стульев. Стулья такие можно и как транспорт использовать. А столы вместо официантов. Сделал заказ с телефона, и прикатил стол с едой.
old_bear
26.07.2016 23:42+3вы сильно опоздали с вашей идеей :)
r-lib.ru/wp-content/uploads/2013/09/092513_1127_1.jpgELEKTRO_YAR
27.07.2016 01:50+1ну тут немножечко другое.
jabr
27.07.2016 08:57Конечно другое! BB-8:
www.androidcentral.com/sites/androidcentral.com/files/styles/large/public/topic_images/2015/sphero-bb8-topic.pngLysanovSergey
27.07.2016 08:59+3С BB-8 данный шаробот не имеет почти ничего общего. У BB-8 центр тяжести находится ниже геометрического центра, поэтому ему не надо стабилизировать себя, он как неваляшка.
jabr
27.07.2016 09:18«С BB-8 данный шаробот не имеет почти ничего общего.»
Ну представьте, что нижний шар меньше, а «голова» — выше
«У BB-8 центр тяжести находится ниже геометрического центра, поэтому ему не надо стабилизировать себя, он как неваляшка»
Ок, покатайте (не наклоняйте, а именно покатайте) неваляшку. «Голова» же подвижная
romy4
27.07.2016 10:21Мне кажется, что у BB-8 таки другая модель передвижения. У него не голова движет шаром, а наоборот, голова только старается удерживаться в верхней точке шара, шар самостоятельно движется в нужную сторону внутренними двигателями.
LysanovSergey
27.07.2016 10:35+3Примерно так выглядит механика bb-8:

jabr
27.07.2016 10:59Да ладно, все видели, что там вообще антигравитация.
А если серьезно, то ИМХО это непринципаиально. Когда вы свой аппарат толкаете, его голова пытается мячик догнать (прокрутить, чтобы на него залезть)?LysanovSergey
27.07.2016 11:40Скорее наоборот, мячик пытается подстроиться под тело.
jabr
27.07.2016 13:04У вас такой хитрый мячик? По Вашему рисунку я уже готов поверить, что BB-8 пытается подстроится под «голову».
У меня складывается такое ощущение, что Вы пытаетесь мне объяснить, что автомобиль, едущий в гору на первой передаче и автомобиль, тормозящий двигателем на первой передаче, когда он спускается с нее — два принципиально разных устройства…LysanovSergey
27.07.2016 13:13+1Голова у BB-8 не имеет никакого функционального назначения. Это обычный sphero, просто сверху на магните или еще на чем-то держится голова. И как-то странно говорить, что под чего подстраивается.
jabr
27.07.2016 13:47Ну вообще BB-8 это режиссерская выдумка, странно рассуждать что для чего используется. Просто подумал, что Ваш аппарат его бы вполне материализовал хотя бы в форме концепт-кара (конечно, при небольшом изменении) :)
LysanovSergey
27.07.2016 13:57Если под режиссерской выдумкой вы подразумеваете, что его не существует в природе, то вы ошибаетесь.
https://www.youtube.com/watch?v=A_K10fX9DSYjabr
27.07.2016 15:13Спасибо за видео. Предполагаю, что механика движения «головы» у этого экземпляра аналогична Вашему устройству.

spmbt
26.07.2016 22:31В итоге, такая идея конструкции сложна технически (чего стоят хитрые омни-колёса со скольжением в поперечной плоскости), но проста математически — двигаться можно тремя колёсами в любом направлении с помощью подбора тяги двух колёс из 3. (Похоже, именно поэтому и понадобились двигатели с управлением по току, что тоже удорожило.) Правда, есть и плюсы — беспроблемная ориентация столика, на котором можно расположить видеокамеру.
Но что, если построить модель движения для более примитивной конструкции, просто трёх жёстких резиновых колёс? Уворачиваться от падения и двигаться придётся более хитрым механизмом «взбирания на гору круговым движением» двух и подтормаживанием одного, самого верхнего из колёс. Заставлять двигаться шар тоже придётся не простым качением тягловых «нижне-передних» колёс «в гору», а движением по правому или левому склону шара, постоянно подбираясь к его вершине сбоку, дозированно тормозя верхним колесом. При этом верхний столик (и всё тело) неизбежно требовал бы вращения. И тогда, чтобы стабилизировать на нём камеру, придётся ставить верхний поворотный двигатель.
Наверняка, в обеих проектах такая идея прорабатывалась и даже уравнения движений, наверное, написаны (и модель в матлабе есть?). Скажите, (автор изделия,) что сложного возникает по пути реализации этой идеи (с упрощением механики)? Может быть, неустойчивость траектории? Может быть, всё равно нельзя отказаться от контроля тяги?LysanovSergey
26.07.2016 23:13В итоге, такая идея конструкции сложна технически (чего стоят хитрые омни-колёса со скольжением в поперечной плоскости), но проста математически — двигаться можно тремя колёсами в любом направлении с помощью подбора тяги двух колёс из 3. (Похоже, именно поэтому и понадобились двигатели с управлением по току, что тоже удорожило.) Правда, есть и плюсы — беспроблемная ориентация столика, на котором можно расположить видеокамеру.
На самом деле такая конструкция самая простая в исполнении, именно поэтому я и выбрал её. Без омниколес не обойтись в любом случае. В каком положении не ставь обычные колеса, будет возникать большое трение и проскальзывание, что практически невозможно учесть в мат. модели и, следовательно, в управлении.
Управление по току понадобилось не по этой причине. Когда речь идет о стабилизации таких систем, управление может быть только по моменту(по току). Можно пробовать управлять по скорости и подбирать коэффициенты эмпирически, но не думаю что из этого выйдет что-то.
Наверняка, в обеих проектах такая идея прорабатывалась и даже уравнения движений, наверное, написаны (и модель в матлабе есть?)
Не очень понял про какие два проекта вы говорите. CMU и Rezero? Уравнения движения для них есть, но, как я писал выше, они составлены с учетом некоторых упрощений. Моделей в матлабе в открытом доступе у них нет.
Я ответил на ваши вопросы?spmbt
27.07.2016 00:48> Без омниколес не обойтись в любом случае. В каком положении не ставь обычные колеса, будет возникать большое трение и проскальзывание
---вот тут неверно — можно (и нужно) сделать такие допустимые движения, чтобы трения и проскальзывания не было. Как этого достичь — легко представить. Представьте для простоты, что вы на 3 колёсах, расположенных по линиям равностороннего треугольника, катаетесь по плоскости. Как повернуться, чтобы не было проскальзывания? Остановите одно колесо, двигаясь только двумя другими. Они поведут бота по кругу вокруг точки стоящего колеса. Точно так же можно представить и движения сразу тремя колёсами, если мёртвую точку (точку вращения бота) надо переместить. Строго говоря, трение будет, но только «вращательное», для всех 3 колёс, если их скорости подбирать. Но на то и процессор на боте, чтобы подбирать. И вся специфичность такого бота будет в том, что все его движения не должны быть скольжениями, а только поворотами вокруг некоторой требуемой точки.
> Можно пробовать управлять по скорости…
---Верно — и при отсутствии проскальзываний, которые в модели с омни-колёсами как раз допускаются, а с новой моделью можно избежать — скоростей или положений с датчиков поворотов колёс будет достаточно, а погрешности будут компенсироваться корректировками из других датчиков (гироскоп)
> про какие два проекта вы говорите
---ваш и Rezero (темой не занимался, прочитал только Вашу статью; да, спасибо, на вопросы ответили полностью). Ну, значит, как я понял, мат-моделей для обычных колёс для движений без проскальзываний нет. Значит, есть, что изобретать дальше: )
А дальше придумалась ещё одна простая конструкция, которая будет на той же модели без проскальзываний и при этом держать шарик — поставить 3 колеса на выдвинутых осях, чтобы прикасались к шару ниже его центра масс, а сверху шар зафиксировать 4-й пассивно крутящейся точкой
(К сожалению, не нашёл ни одной иллюстрации своего описания в https://www.google.ru/search?tbm=isch&sa=1&q=ball+balancing+robot — везде 3 колеса лишь сверху. Суть накидал в своём рисунке.)



Alexander_vrn
26.07.2016 23:41+6Весьма достойная работа. Я бы сказал, слегка избыточная для диплома :) Спасибо большое за рассказ.

{kind=link}
{kind=link}
Pafnutyi
27.07.2016 10:17Вы уже решили куда планируете пойти работать и на какое ежемесячное вознаграждение рассчитываете?
LysanovSergey
27.07.2016 10:31+2Странный вопрос. Я начал работать программистом со второго курса. На ежемесячное вознаграждение не жалуюсь, пока :).
Pafnutyi
27.07.2016 14:51Я не про деньги как таковые, просто интересно узнать неужели в стране которая даже своих станков ЧПУ не производит, где-то требуется разработка роботов. Где делается продукция которые потенциально может продаваться пусть маленькими но партиями в том числе зарубежным покупателям, и быть при этом не только игрушкой от околовоенного заказа или хобби?
OYTIS
27.07.2016 11:32Респект автору!
Самостоятельно сделать механику, конструкцию, математику, софт и даже немного электроники — это я понимаю full stack.

RealFLYNN
27.07.2016 11:42+2Новый оборонный заказ :)

HarryMorgan
27.07.2016 16:13+1Не много дипломов делают в железе!
А где сейчас этот робот? Его руками можно пощупать?

IT_Rebel
28.07.2016 11:55+1Понятно, что заниматься стабилизацией колонны на шаре занятнее и с точки зрения дипломного проекта более науко и трудоёмко… но вот с чисто практической точки зрения — вариант bb8 с механикой внутри шара рассмотрели, но можно же её вынести за пределы шара, допустим на кольцо ниже центра масс, и задача балансирования шаткой колонной отпадёт сама собой. Думаю для решения практических задач шароботов такая конструкция оптимальнее.

LysanovSergey
28.07.2016 13:34Задача стабилизации не отпадет, т.к. ваше кольцо будет падать на бок.
IT_Rebel
28.07.2016 16:17Если шар будет стоять на месте — да, даже идеально развесованное кольцо упадёт на бок. Но уверен, в движении кольцо на подвесах-колёсах будет стабилизировать проще, за счёт инерции, чем башню на шаре. Это как с велосипедом — он в статичном положении тоже рухнет сразу.
IT_Rebel
28.07.2016 16:27Ещё один момент — положение центра масс. Чем он ниже, тем стабильнее любая движущаяся по земле система при прочих равных.
LysanovSergey
28.07.2016 17:15Это неверно. Как я и писал в статье, что чем выше центр тяжести у обратного маятника, тем легче его стабилизировать. А как ваше кольцо снаружи не располагай, все равно получается трехмерный обратный маятник.
Для примера возьмите карандаш и попробуйте стабилизировать его на ладони в вертикальном положении. Затем возьмите стержень длиннее. Разницу сразу почувствуете.
IT_Rebel
28.07.2016 16:33А если сделать внутри кольца с начинкой-моторами ещё одно, вращающееся (точнее наверное два, в разные стороны, чтобы момент погасить), то этот гироскоп не даст системе упасть и стоя на месте… получится управляемая юла с шаром в качестве точки опоры.
foxin
Офигенная штука.
Какую макс скорость развивает при управлении с джойстика?
Как происходит начало движения — бот делает «шаг» назад для наклона и потом начинает движение?
LysanovSergey
Совершенно верно. Вначале необходимо сделать наклон в сторону движения.