

Посадка на неподготовленную площадку — один из самых сложных элементов пилотирования вертолета, она сопряжена с повышенным риском аварии и человеческих жертв. Необходимость в посадке на неподготовленные площадки возникает в первую очередь в военной авиации: высадка, эвакуация, доставка боеприпасов и грузов в боевых условиях — в этих полетных заданиях зачастую приходится сажать вертолет в неподготовленной или неразведанной зоне посадки (или зависать непосредственно над ней).
Одной из ключевых проблем при посадке на неподготовленные площадки являются условия недостаточной видимости (УНВ, англ. degraded visual environment, DVE). Под УНВ понимается слабая или нулевая оптическая видимость закабинной обстановки, обусловленная любым из следующих факторов или их сочетанием: слабая освещенность, неблагоприятные метеорологические условия (туман, метель и т. д.), поднимаемый винтом вертолета вихрь твердых частиц. Последний фактор представляет особую опасность.
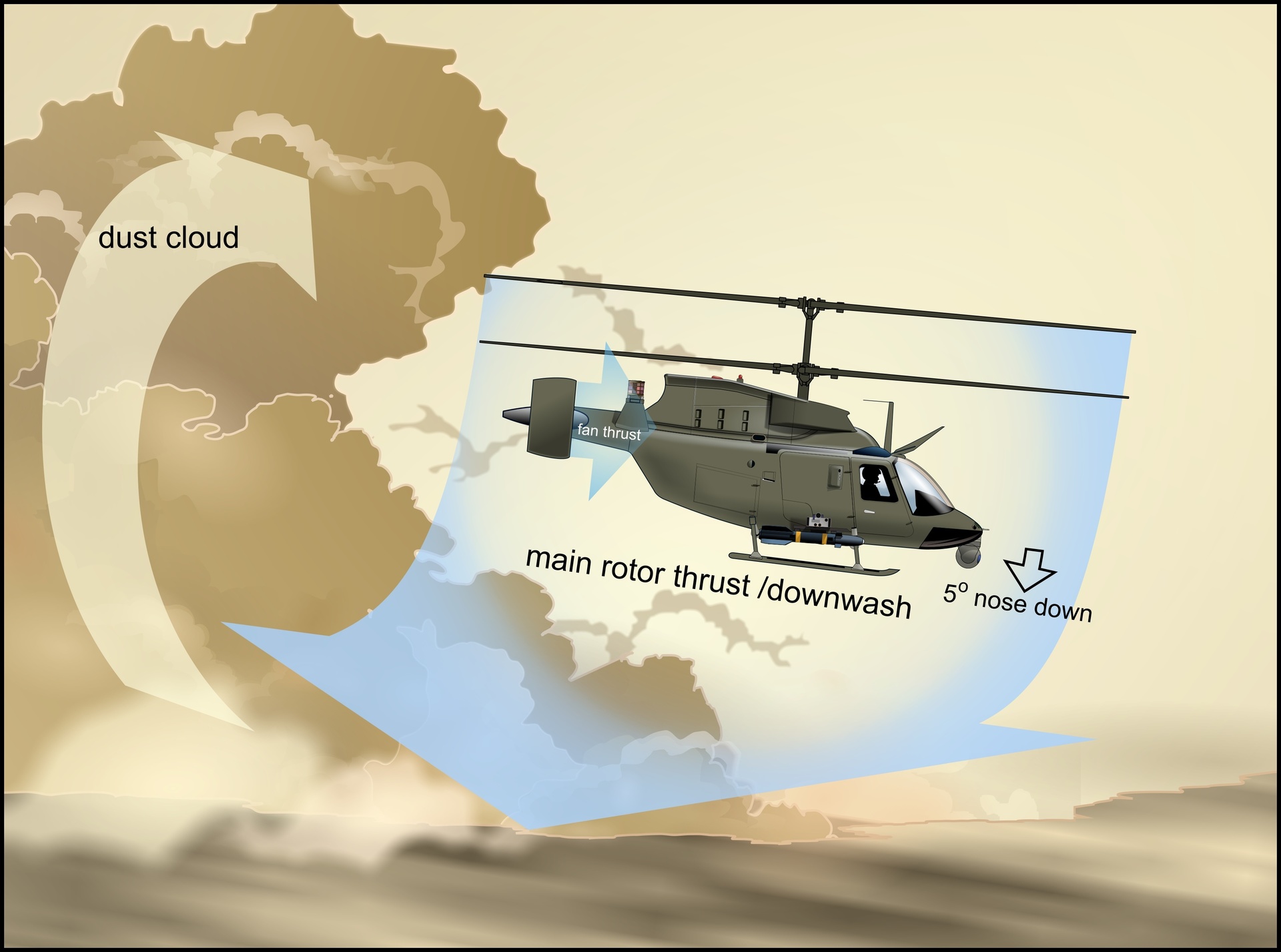
При посадке на сухой или заснеженный грунт воздушная струя от несущего винта вертолета поднимает твердую взвесь, что критически снижает видимость и может привести к неправильной оценке пилотом положения вертолета относительно земли, кроме того, могут остаться незамеченными препятствия в зоне посадки (большие камни, статичные и движущиеся объекты). Термин «пыльный вихрь» (brownout) описывает это явление при посадке или взлете на сухой поверхности. Подобные же условия при посадке или взлете на заснеженной поверхности описываются термином «снежный вихрь» (whiteout).

В обзоре я рассмотрю решения в области технологий синтетического зрения для безопасной посадки вертолета, позволяющие формировать трехмерное изображение зоны посадки сквозь пыльный или снежный вихрь.
Проблема
Решения
Проблема
Слепая посадка на неподготовленные площадки становится причиной значительного процента авиационных происшествий.
По данным Канадских вооруженных сил, с 1986 по 2006 гг. снежный вихрь стал причиной двух катастроф и 54 аварий вертолетов.

Катастрофа гражданского вертолета из-за снежного вихря. Канада, 20.05.2000.
Схожая статистика приводится и по посадке на песчаную поверхность. С началом операций НАТО на Ближнем Востоке пыльный вихрь становился причиной аварий вертолетов в приблизительно 75% случаев. По данным ВС США с 1990 по 2012 гг. более 30 вертолетов специального назначения было выведено из строя и 60 членов экипажа погибло при выполнении посадки в пыльном вихре в местностях с сухим климатом (Ирак, Афганистан). Ежегодный материальный ущерб Вооруженным силам США от авиационных происшествий при посадке вертолетов в УНВ оценивается в 100 млн. долларов [1].

Катастрофа вертолета AH-64 Вооруженных сил США. Ирак, ноябрь 2003.
Данные по Вооруженным силам РФ не обнародованы. Согласно данным Управления инспекции по безопасности полетов Федерального агентства воздушного транспорта РФ в период с 2001 по первую половину 2014 гг. события при посадке стали причиной 6 катастроф и 24 аварий гражданских вертолетов [2].

Авария гражданского вертолета при посадке.Россия, Ямал, 03.02.2014.
Посадка вертолета в УНВ опасна тем, что вынуждает пилота полагаться на собственные ощущения и бортовые навигационные приборы, данных от которых зачастую оказывается недостаточно. Однако, еще проходя обучение, пилоты привыкают при посадке полагаться в основном на внешнюю визуальную информацию, самостоятельно просматривая выбранную зону посадки на предмет опасности. При этом наземные объекты используются ими в качестве ориентиров для управления пространственным положением воздушного судна. Это становится особенно важным при посадке или маневрировании вблизи различных препятствий, таких как деревья, линии электропередач, мачты и т.д. Из-за присущей всем вертолетам неустойчивости, требующей предельной концентрации при управлении, пилоты должны постоянно отслеживать пространственное положение вертолета.
При управлении вертолетом в УНВ клубы снега или пыли не позволяют разглядеть наземные объекты-ориентиры невооруженным взглядом. В связи с этим резко возрастает зависимость пилота от собственных вестибулярных ощущений. Однако в необычных гравитационно-инерциальных условиях, как, например, в воздухе, информация, передаваемая вестибулярным аппаратом и проприоцепторами, может неправильно толковаться мозгом, что приводит к дополнительным физическим нагрузкам на пилота и может иметь потенциально опасные последствия.
Имея дело с недостаточными и (или) противоречивыми физическими ощущениями, пилот может испытывать кратковременную пространственную дезориентацию. Пространственная дезориентация в данном случае определяется как невозможность восприятия, либо как неправильное восприятие движения и пространственного положения летательного аппарата относительно заданной системы координат, в качестве которой выступает поверхность земли и гравитационная вертикаль [3].
Такая дезориентация может принимать различные формы: пилот не осознает бокового уклона вертолета; у пилота создается ложное ощущение бокового уклона, движения или поворота вертолета, хотя в действительности судно находится в состоянии висения. Иллюзия движения возникает из-за циркуляции снега/пыли снаружи кабины и может происходить во всех шести степенях свободы движения тела, то есть пилоту может казаться, что вертолет линейно перемещается по декартовым осям x, y, z (иллюзия линейного движения) или поворачивается вокруг любой из трёх взаимно перпендикулярных осей (рыскание, тангаж, крен).
Таким образом, ввиду отсутствия визуального контакта с закабинной обстановкой и ненадежности собственных вестибулярных ощущений, для безопасного маневрирования (висения, посадки, взлета) в условиях недостаточной видимости пилот вынужден полагаться преимущественно на показания навигационных индикаторов, информация на которые поступает от бортовых датчиков.
Однако устанавливаемые на современных вертолетах датчики не дают всей необходимой информации в сложных метеоусловиях, так как не способны осуществлять эффективное сканирование зоны посадки сквозь песчаную или снежную взвесь. Кроме того, бортовые навигационные приборы не дают на выходе легкочитаемое изображение, тем самым еще более повышая нагрузку на пилота. Таким образом, к авариям вертолетов при посадке в условиях недостаточной видимости ведут недостоверные визуально-сенсорные ощущения пилота и нехватка информации с бортовых датчиков.
При посадке на неподготовленные площадки помимо преодоления УНВ непосредственно во время приземления, уже на этапе подлета к зоне посадки возникает необходимость точного определения типа, рельефа и характеристик подстилающей поверхности. Например, при посадке на снежно-ледовый грунт необходимо знать состав грунта, толщину снежно-ледового покрова и его плотность, чтобы избежать проваливания вертолета в сугроб или под лед. При этом неровности высотой 0,5 м и более и уклоны поверхности более 15° уже представляют опасность для посадки вертолета, особенно при сильном ветре.
Итак, можно выделить две основные причины авиационных происшествий:
1. Недостаточная осведомленность о пространственном положении вертолета

2. Недостаточная осведомленность о состоянии зоны посадки

Что касается осведомленности о пространственном положении вертолета, то в целом современные бортовые навигационные приборы (GPS, инерциальный измерительный блок, доплеровский измеритель скорости, гироскоп, радиовысотомер) способны дать все вышеперечисленные сведения, однако только при хорошей видимости. Так, большинство современных радиовысотомеров плохо работают в пыльном/снежном вихре и не отображают реальную высоту над землей и скорость снижения.
Еще хуже дело обстоит с сенсорами состояния зоны посадки для обзора сквозь вихрь: существующие решения, такие как традиционные метео-РЛС, тепловизионные и ТВ-камеры, здесь не пригодны, а сенсоры с высокой проникающей способностью находятся на разных этапах технологической готовности. О них и пойдет речь далее.
Решения
Технологические решения проблемы безопасной посадки вертолета на неподготовленную площадку в условиях недостаточной видимости находятся на различных этапах готовности, в мире активно ведутся R&D по созданию систем посадки вертолета, однако на данный момент не существует готового для массового производства коммерческого решения.
Важно еще раз отметить, что любое системное решение по обеспечению безопасной посадки должно решать две задачи:
1. обеспечивать ситуационную осведомленность о пространственном положении вертолета;
2. обеспечивать ситуационную осведомленность о состоянии зоны посадки.
Такая система должна включать в себя, по крайней мере, два компонента:
1. сенсоры с высокой проникающей способностью для сканирования зоны посадки в условиях недостаточной видимости;
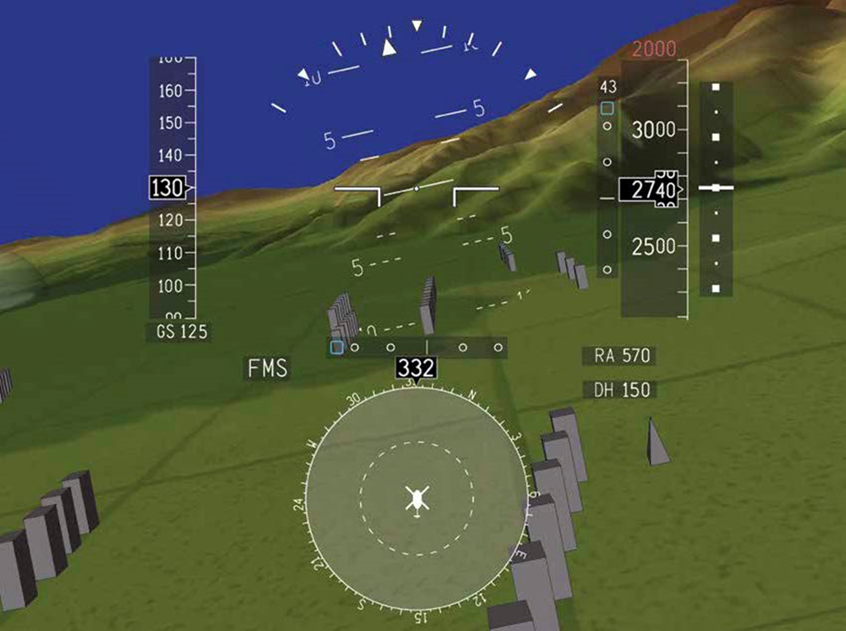
2. дисплейный индикатор для отображения данных с сенсоров в интуитивно-понятном для пилота виде (синтетическое зрение).
Синтетическое зрение
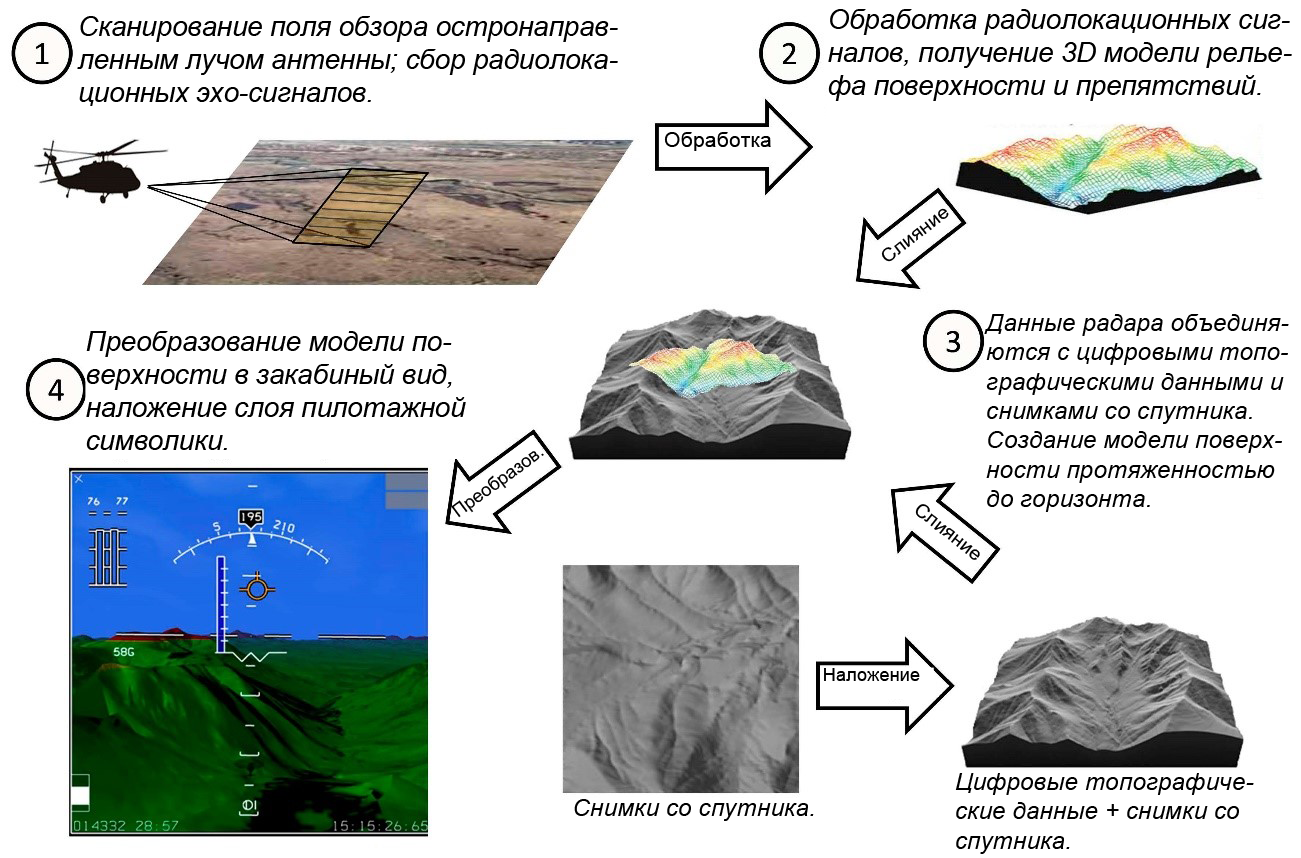
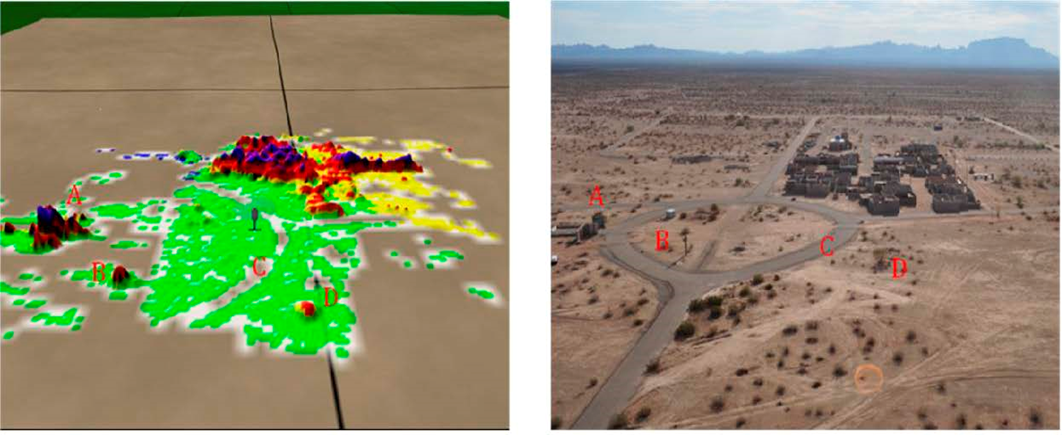
Технология синтетического зрения (synthetic vision) подразумевает обработку получаемого с сенсоров сигнала и его слияние с предварительно загруженными базами данных поверхности, что в итоге дает синтетическое трехмерное изображение зоны посадки. На данный момент системы синтетического зрения находятся на недостаточном технологическом уровне готовности. Основные проблемы таких систем заключаются в обеспечении сбора сенсорами релевантной информации, включая ориентиры местности и препятствия, а также в отображении этой информации в легко читаемой форме. Это зависит от эффективности обработки полученных данных и надежности методов слияния изображений, однако ни то, ни другое не являются достаточно развитыми технологиями.
Технология синтетического зрения
В настоящий момент наиболее развиты технологии, разработанные для уже существующих пилотажных применений. В области датчиков и сенсоров это GPS, инерциальный измерительный блок, доплеровский измеритель скорости, гироскоп, радиовысотомер (определяют пространственное положение вертолета), метео-РЛС сантиметрового диапазона, ТВ и ИК камеры, лазерные локаторы — лидары (определяют состояние зоны посадки). В области индикаторов это традиционная пилотажная символика и нашлемные индикаторные модули (дневной индикатор и индикаторные очки ночного видения).
ТВ и тепловизионные ИК камеры, лидары позволяют просматривать избранную зону посадки с хорошим разрешением до начала пыльного/снежного вихря, однако их эффективность в УНВ крайне ограничена. Метео-РЛС сантиметрового диапазона обладают хорошей проникающей способностью, однако их недостатки заключаются в низком разрешении по дальности вследствие недостаточной широкополосности излучаемых сигналов, ограниченной скорости сканирования из-за использования механического привода в большинстве антенн и в слишком большой слепой зоне вследствие использования импульсных сигналов. Все эти факторы в совокупности делают метео-РЛС непригодными для определения состояния зоны посадки на небольших расстояниях, обеспечивающих достаточное разрешение.
Исследованию проблемы безопасной посадки вертолета в условиях пыльного/снежного вихря уделяется большое внимание в государствах-членах НАТО, чьи вооруженные силы понесли большие потери от аварий и катастроф вертолетов во время боевых действий на Ближнем Востоке. На основании технических докладов НАТО наиболее перспективными направлениями для решения проблемы посадки в пыльном вихре признаны радиолокация в миллиметровом диапазоне волн и лазерная локация. Лидары имеют более высокое пространственное разрешение, чем радары, однако они подвержены более высокому затуханию в пыльном вихре. Напротив, РЛС миллиметрового диапазона имеют незначительное затухание и обеспечивают приемлемое пространственное разрешение.
Радары W диапазона
Активная РЛС миллиметрового диапазона с рабочей частотой 77–94 ГГц может осуществлять эффективное сканирование сквозь пыльный вихрь. В современных западных образцах применяются и адаптируются существующие радарные технологии, например, радары головок самонаведения ракет. Радиолокационная информация накладывается на сохраненную базу данных поверхности, после чего синтетическое изображение зоны посадки с отмеченными цветом препятствиями выводится на дисплейный индикатор (бортовой или нашлемный).
Наибольшее количество испытаний радиолокационных систем посадки было проведено в США.
Sandblaster — США
C 2007 по 2009 гг. под эгидой DARPA разрабатывалась и испытывалась система Sandblaster на основе РЛС 94 ГГц. В разработке системы принимали участие компании Sikorsky, Honeywell и Sierra Nevada Corporation. Вертолет, оснащенный опытным образцом системы, произвел успешную посадку в пыльном вихре. Были также проведены испытания по обнаружению проводов, в результате которых было показано, что пылепроникающий сенсор Sandblaster отчетливо видит линии электропередач [4].


Состав системы:
- 94 ГГц импульсный радар (Sierra Nevada Corp.)
- Базы данных поверхности с информацией о рельефе и статических препятствиях (Honeywell)
- Блок обработки и слияния радиолокационных сигналов и баз данных (Honeywell)
- Пилотажная символика(Honeywell и Sikorsky)
- Индикатор синтетического зрения (Sikorsky)
- Электродистационная система управления полетом (Sikorsky)

Из отчета пилотов, проводивших тест системы: «разрешающая способность радара была ниже, чем хотелось бы, и время сканирования площадки для приземления также оказалось больше, чем хотелось бы».
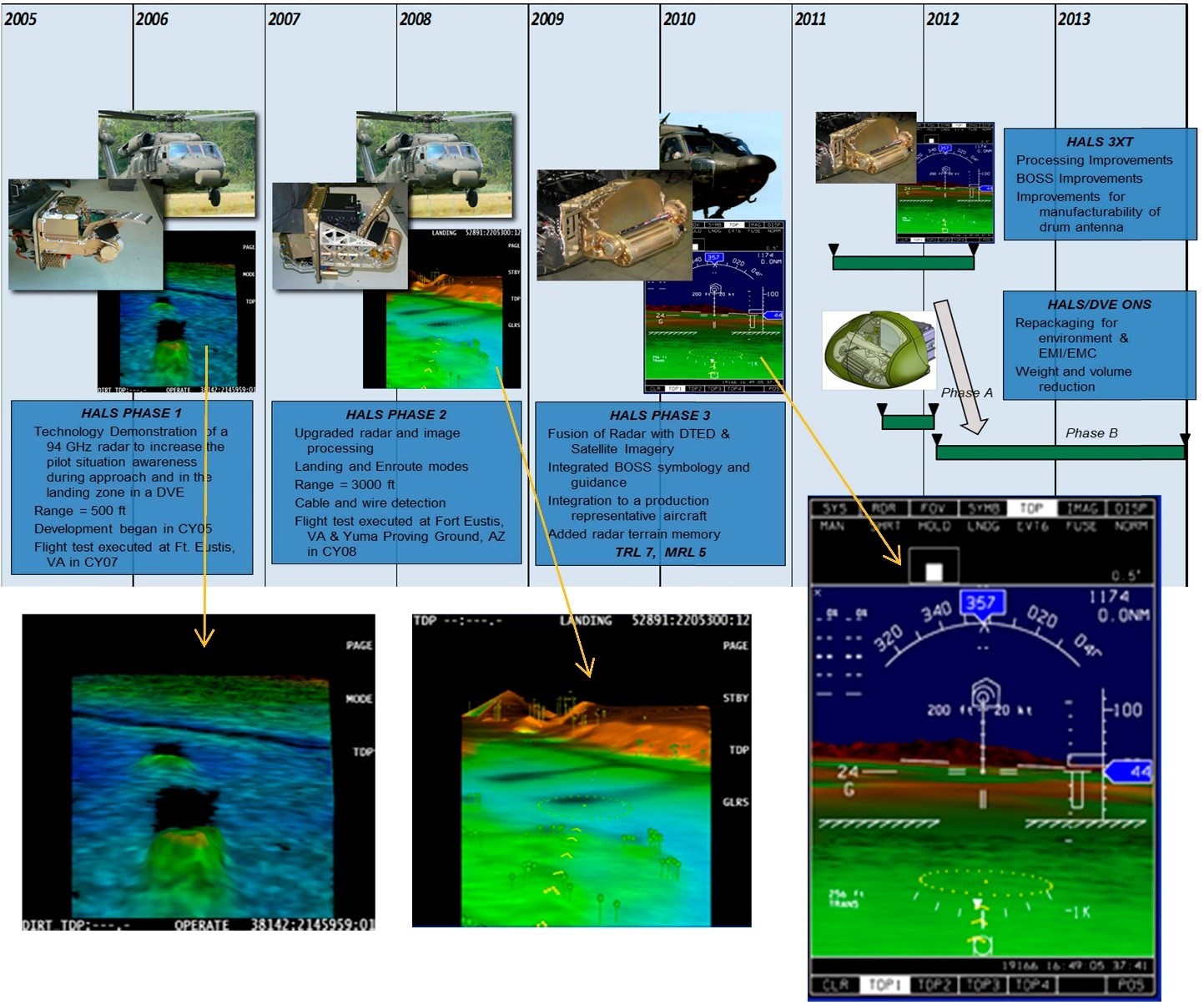
HALS (Helicopter Autonomous Landing System) — США
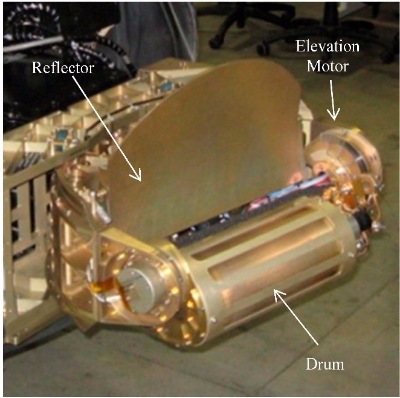
Еще одна система посадки на основе радара W диапазона, HALS (Helicopter Autonomous Landing System), разрабатывается компанией Sierra Nevada Corporation (США) с 2005 г. На данный момент представлено третье поколение системы HALS-3XT. Как и в системе Sandblaster, в HALS-3XT используется радар 94 ГГц с механическим сканированием. Антенная конструкция с решёткой, напечатанной на вращающемся цилиндрическом барабане, поддерживает приемлемую скорость сканирования. Пространственное разрешение сканирования системы составляет 20 см, радиус обзора – более 1000 м.
Состав системы:
- 94 ГГц импульсный радар
- Антенна с дифракционной решёткой, напечатанной на вращающемся цилиндрическом барабане
- Антенная решетка с электронным сканированием (в разработке)
- Базы данных поверхности
- Блок обработки и слияния радиолокационных сигналов и баз данных
- Пилотажная символика BOSS (Brownout Symbology System)
Сообщается о разработке антенной решетки с электронным сканированием для системы HALS[5].
BLAST (Brownout landing aid system) — Великобритания
В системе BLAST (Brownout landing aid system) производства BAE Systems в качестве радара используется моноимпульсный радар самонаведения ракеты MBDA Brimstone 94 ГГц.
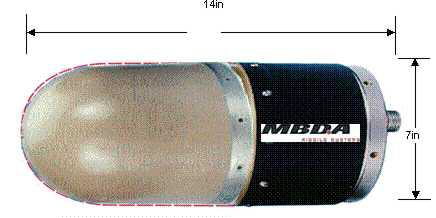
Сообщается, что минимальный обнаруживаемый системой BLAST диаметр проводов ЛЭП составляет 3,2 мм. Производитель также сообщает о возможности замены основного сенсора системы на лидар или длинноволновую ИК-камеру[6].
Состав системы:
- 94 ГГц моноимпульсный радар с линейной частотной модуляцией (FMCW)
- Используется радар ракеты MBDA Brimstone
- Базы данных поверхности
- Блок управления и обработки сигнала
- Пилотажная символика BOSS (Brownout Symbology System)
Лидары
Технологии лазерной локации также активно развиваются как средство обеспечения безопасной посадки вертолета. Несмотря на то, что лидар (тж. ладар, light/laser detection and ranging) имеет более высокое затухание в пыльном вихре, дожде и тумане, чем РЛС W диапазона, при сканировании зоны посадки на наличие препятствий лидар может обеспечить намного более высокое пространственное разрешение. Снимки зоны посадки, сделанные лидарным сенсором до начала пыльного вихря, обновляют динамическую навигационную базу данных, после чего на индикаторе пилота выводится изображение с кодированными цветом препятствиями. Стандартная дальность обнаружения реальных целей (рельефа местности, домов, деревьев) составляет более 1000 м, дальность обнаружения проводов среднего диаметра 5 мм составляет 600 м.
В 2009 г. Научно-исследовательской лабораторией ВВС США была испытана лидарная система 3D-LZ, сенсор для которой был разработан компанией Burns Engineering (США). Разрешение сканирования было в 20 раз выше, чем у радаров миллиметрового диапазона. Пилоты были способны обнаружить объекты высотой 45 см[7].
Лидарная система DUSPEN (Dust Penetrating System) разрабатывается компанией Arete Associates (США)[8].
Лазерный локатор HELLAS (Helicopter Laser Radar), выпускаемый немецким концерном EADS, активно применяется на вертолетах полиции Германии и ВС США. В настоящее время лидар HELLAS доработан и выпускается входящей в концерн EADS компанией Airbus Defence and Space в составе системы безопасной посадки вертолета SFERION (Situational awareness system).
В системе ADAS (Advanced Distributed Aperture System) производства Raytheon (США) используется оптическое зондирование в ближнем ИК-диапазоне, а также трехмерное аудио-оповещение пилота при приближении к препятствиям.
Комплексным решением для пилотирования вертолета в условиях недостаточной видимости является система HeliSure разработки Rockwell Collins (США).
Компоненты HeliSure H-SVS (Helicopter Synthetic Vision System) и H-TAWS (Helicopter Terrain Awareness and Warning System) улучшают ситуационную осведомленность экипажа и позволяют формировать высокореалистичное трехмерное изображение нижележащей поверхности и зоны посадки. Однако данных о технологии, лежащей в основе сенсоров, в открытом доступе не представлено.
Разработки
В 2013 г. Министерство обороны США запустило программу DVEPS (Degraded Visual Environment Pilotage System), в рамках которой до 2018 г. должна быть разработана комплексная система посадки в УНВ. В программе участвуют Boeing, Rockwell Collins, BAE Systems, Sierra Nevada Corp.
Параллельно с этим, агентством DARPA запущено несколько новых проектов, призванных способствовать решению проблемы безопасной посадки в УНВ (прежде всего, в пыльном вихре). В рамках проекта DARPA MFRF (Multifunction RF) разрабатывается РЛС с активной фазированной антенной решеткой (АФАР) миллиметрового диапазона для обеспечения посадки военной авиации в УНВ. В разработках участвуют BAE Systems совместно с Rockwell Collins, Mustang Technology Group, Honeywell, Applied Signal Intelligence и Мичиганским университетом.
Проект AWARE-LS (Advanced Wide Field-of-View Architectures for Image Reconstruction and Exploitation) направлен на разработку нового поколения сенсоров формирования изображения (ИК камер, лидаров, оптических камер, радаров миллиметрового диапазона) и алгоритмов обработки данных для создания высокореалистичного изображения закабинной обстановки в неблагоприятных атмосферных условиях. В проекте участвуют Northrop Grumman Corp. и Университет Мемфиса.
1. “Rotary-Wing Brownout Mitigation: Technologies and Training”. A Technical Report by NATO Research and Technology Organisation, North Atlantic Treaty Organisation (Jan. 2012).
2. Анализ состояния безопасности полетов в гражданской авиации Российской Федерации в первом полугодии 2014 года. Управление инспекции по безопасности полетов Федерального агентства воздушного транспорта Российской Федерации. (Авг. 2014).
3. Robert Cheung. “Spatial Orientation – Nonvisual Spatial Orientation Mechanisms” // F. Previc, W. Ercoline (Eds.) Spatial Disorientation in Aviation. Progress in Astronautics and Aeronautics Volume 203. American Institute of Aeronautics and Astronautics, Inc. Restin, VA, USA. (2004), 37–94.
4. TTPC-AER-TP2-2011 Task outcome report for enhanced/synthetic vision pilotage systems. The Technical Co-operation Program. 2011.
5. Jack Cross; John Schneider and Pete Cariani. " MMW radar enhanced vision systems: the Helicopter Autonomous Landing System (HALS) and Radar-Enhanced Vision System (REVS) are rotary and fixed wing enhanced flight vision systems that enable safe flight operations in degraded visual environments ", Proc. SPIE 8737, Degraded Visual Environments: Enhanced, Synthetic, and External Vision Solutions 2013, 87370G (May 16, 2013)
6. Brian Sykora. «BAE systems brownout landing aid system technology (BLAST) system overview and flight test results», Proc. SPIE 8360, Airborne Intelligence, Surveillance, Reconnaissance (ISR) Systems and Applications IX, 83600M (May 1, 2012).
7. James Savage; Walter Harrington; R. Andrew McKinley; H. N. Burns; Steven Braddom, et al. «3D-LZ helicopter ladar imaging system», Proc. SPIE 7684, Laser Radar Technology and Applications XV, 768407 (April 29, 2010).
8. James T. Murray; Jason Seely; Jeff Plath; Eric Gotfreson; John Engel, et al. " Dust-Penetrating (DUSPEN) “see-through” lidar for helicopter situational awareness in DVE ", Proc. SPIE 8737, Degraded Visual Environments: Enhanced, Synthetic, and External Vision Solutions 2013, 87370H (May 16, 2013).
Комментарии (29)


Sly_tom_cat
10.09.2016 00:21А мне вот интересно — а может ну его это осведомление экипажа? Ведь можно же нейронку натренировать вертолет сажать (модели и БПЛА вертолетного типа — уже умеют сажать).
Собственно как вариант: на земле нужно три маяка вокруг зоны посадки. На борту пеленгаторы. По данным пеленгаторов пространственное положение определяется на раз.
Если на земле некому выставить маяки — то скидываем их с вертолета с большой высоты (не поднимая пыль/снег) точность не так важна — главное разброс. Забить в систему выбранную точку посадки с привязкой к маякам и в перед, то-есть вниз…
semfromshire
10.09.2016 01:03Ни один военный не согласится сажать боевой вертолет на «нейронке». Пока маяки выкидываете и координаты настраиваете — собьют нахрен. Помимо пространственного положения есть еще препятствия в зоне посадки — канавы, камни, столбы. с ними как быть, их маяки не покажут.
На самом деле никто просто в таких условиях старается не садиться. Висят в метре над землей и прыгают.
Moog_Prodigy
10.09.2016 07:45> Висят в метре над землей и прыгают.
А не получится ли так, что из-за пыли высота опеределена неверно, и по факту там, скажем, метров 10? Солдаты могут разбиться.
alchemist666
10.09.2016 11:42Вроде по этой причине, сначала сбрасывают оборудование/экипировку. Того же шлема достаточно…
semfromshire
10.09.2016 11:46+1Из летной инструкции 60-х годов к Ми: при висении и посадке над заснеженной поверхностью член экипажа сначала с борта тыкает длинной палкой снег, чтобы убедиться в его глубине и плотности, потом уже принимает решение о посадке.
В понедельник точную цитату поищу))
semfromshire
12.09.2016 09:39При выполнении посадок на незнакомые площадки, покрытые глубоким снегом, для обеспечения благополучного приземления рекомендуется, зависнув на малой высоте, высадить одного из членов экипажа, который, убедившись, что под снегом нет ям или больших неровностей, даст сигнал о возможности посадки. Проверку поверхности площадки в этом случае удобно производить с помощью рейки длиной 1–1,5 м.
Подполковник Г. А. ТИНЯКОВ «Пилотирование вертолета», 1957г.
Обложка
Sly_tom_cat
10.09.2016 14:32Сейчас «нейронки» у вояк уже много где. Причем уже давно… бывали правда глюки (эрликон ЮАР — гуглится), но во многих областях вояки ИИ доверяют многое.
Собственно самые свежие самолеты летают практически сами, пилот у них типа советует что им делать, но делать что он говорит или нет — они сами решают. Современные автопилоты самолет даже посадить могут. Причем такие и в гражданских лайнерах стоят.
Да, вертолет в управлении (особенно взлет посадка) — гораздо сложнее чем самолет. Но некоторые вертолеты тоже уже сами летают слушая советы пилота… если он есть в кабине.
Так что я не понимаю зачем мудрить с визуализацией — это лишнее (как и пилот). Информацию (датчики) — да для оперативности — они нужны полюбому. Только инфу с датчиков не пилоту надо показывать а в машину грузить. Прокладка уже не нужна.
Пилоты уже реально лишние в самолетах довольно давно — еще в конце 50-х самолеты научились выдерживать перегрузки большие чем мог выдержать человек. Т.е. самолет мог бы сам уйти от ракеты, например, но при этом пилот отключится… и может не включиться…ndiezel
10.09.2016 18:26Потому что не так важна сама машина, как способность единицы выполнить приказ. Если самолет может увернуться от ракеты (как будто это имеет значение, лол), но не может разбомбить позицию противника по радиоуказанию с земли, то никому такое чудо не сдалось.
Sly_tom_cat
10.09.2016 19:31Внезапно, кроме сбрасывания бомб у военных самолетов бывают и другие задачи… Например — сбивать другие самолеты… при этом нужно сбить противника и увернуться от его удара. Но, (лол) — видимо вы считаете, что уворачиваться от ракет не надо — это же не имеет значения — пускай попадает, ну упадет ЛА, ну не выполнит свою задачу — какая собственно мелочь — неправда-ли? (/лол)
Кстати про разбомбить позиции противника — сейчас момент сброса бомб — выбирается у бомеров не человеком… да и на цель вывести самолет можно тоже без человека… Так что именно в бомберах человек не сильно нужен уже сейчас (на современном уровне развития технологий по крайней мере).
Но, собственно, и сам бомбер — не сильно нужен. Вспомним про крылатые ракеты — там ИИ рулит и педалит — и эффективность — с бомбера еще умудриться нужно так попасть как КР попадают…
geher
10.09.2016 19:43Бомбер нужен. Для решения некоторых задач он просто намного дешевле, чем несколько КР. Он, в отличие от КР, может высыпать много бомб по площади, в то время как КР — это эквивалент одной бомбы, хотя и точной.
Да и в качестве базы для запуска самих КР бомбер очень даже может пригодиться.
И человек в бомбере нужен. Не столько для управления (но и для этого тоже, чтобы в случае нефатального отказа автоматики было кому вернуть машину на базу), сколько для принятия решений: по пуску КР, по остановке запущенной атаки (до выхода на рубеж пуска, естественно).
Конечно, есть дистанционное управление (куда можно отнести и отдачу приказов на атаку или остановку атаки), но каналы управления могут быть зашумлены или перехвачены, командование или его средства связи могут быть уничтожены.Sly_tom_cat
12.09.2016 16:39Бомбер — дешевле — никто и не спорит, но вот насчет вернуть машину на базу при нефатальной аварии — это человек ИИ уже проигрывает.
Человек при нефатальном сбое в своем организме — практически труп (на войне особенно). Нефаатльный сбой в ЛА который позволит посадить самолет пилоту позволит и ИИ посадить такой самолет.
ИИ позволяет самолет на одном крыле сажать, что реальные пилоты только пару раз за всю историю смогли сделать (да и то на медленных винтовых машинах, а ИИ сажала реактивный).
0xd34df00d
13.09.2016 01:56В F-15 уже ИИ?
Это я к относительно известному случаю полёта и посадки на одном крыле конкретно с этой машиной.Sly_tom_cat
13.09.2016 11:14Нет. Просто ИИ на специальных машинах учили делать то же самое. И если люди могут такое только будучи супер-профессионалами (жутко дорогими в подготовке) то ИИ — это тоже может и он — такой «супер-профессионал», который легко и дешево копируется.
ndiezel
10.09.2016 19:47Может вы еще и про то, что противовоздушные ракеты взрываются не при контакте не слышали?
Основную проблему поднятую в моем комментарии вы проигнорировали: ИИ самолета не в состоянии принимать и должным образом обрабатывать приказы, а так же принимать решения.Sly_tom_cat
12.09.2016 16:34С чего это вдруг ИИ не может принимать решения и исполнять приказы? Про эрликон и ЮАР-овцев не погуглили что ли? Там Очччень эффективно ИИ принимала решение… даже через чур… Собственно возможность самостоятельного принятия решения в сложной обстановке — это именно то поле где ИИ делает человека как тузик грелку.
Или та же — кр не принимает решения о выборе маршрута, или вы не слышали про работу пкр в режиме стаи?
А отмена приказа «поразить цель» для кр — это банальный подрыв бч по команде с земли до прилета в цель (самоуинчтожение). Команда на уничтожение была дана еще до запуска кр. Точно так же команды отдать ИИ на борту ЛА — можно. Вопрос только в надежности канала связи (но это можно решать разными средствами).semfromshire
12.09.2016 18:40Так, а начиналось все вот с этого утверждения:
Так что я не понимаю зачем мудрить с визуализацией — это лишнее (как и пилот). Информацию (датчики) — да для оперативности — они нужны полюбому. Только инфу с датчиков не пилоту надо показывать а в машину грузить. Прокладка уже не нужна.
Вы правы в том, про «мудрить с визуализацией». Мне тут видится следующие причины, почему продолжают мудрить:
Технологии лучшее развиты в радиолокации и оптике, традиционнее что-ли эти направления. Вояки и их КБ все еще предпочитают старые добрые радары — они этому учились, а ИИ — это все молодо-зелено-не-по-ГОСТУ. Кстати, что там со стандартизацией ИИ для военных? По любому нет утвержденных стандартов, вот и не берутся делать такие разработки, сфера-то инертная очень.Sly_tom_cat
12.09.2016 20:31+1Я же привел уже много примеров ИИ которые уже ИСПОЛЬЗУЮТ вояки.
В сфере ПВО (особенно ближнего радиуса прикрытия и в частности морских систем ПВО) — там человек просто не успевает ничего. И там работает автоматика.
Точно такая же автоматика была уже давно сделана в эрликоне (почитайте уже когда эта пушечка была разработана).
Про наши разработки «умных» ПКР — тоже очень давняя разработка и вояки ей пользуются тоже давно.
Су-27 вообще без автоматики летать не может — у него центровка задняя — т.е. самолет статически не устойчив. Можно конечно эту автоматику не называть ИИ, да только вот дальше эта система обросла вполне конкретным ИИ, который сам выбирает на таких птичках как су-35 — куда какие плоскости отклонять и куда вертеть соплами. Там, с учетом средств управления уже никакая просто линейная система управления не справится.
Так что ИИ для военных уже не молодо и не зелено, а кое в чем (те же ближние ПВО, системы управления ЛА) уже и по «ГОСТу».

alex_vesna
10.09.2016 06:42А какие есть вообще свежие идеи по поводу сенсоров? Кроме ИК и лидаров, ничего нового не появилось? И мне вот как не спецу в теме, интересно почему не используется скажем ультразвук?
semfromshire
12.09.2016 11:29Самое главное вертолет создает широкий спектр акустических шумов, на фоне которых ультразвуковые сигналы просто потеряются. Кроме того ультразвук не используется, видимо, из-за сильного затухания сигнала, это же не автомобильный парктроник. Сразу встанет проблема сделать узконаправленный источник/датчик ультразвука с диаграммой направленности намного уже, чем в автомобильном парктронике, так как расстояние зондирования намного выше.
Собственно, по сенсорам все идеи ограничены спектром электромагнитных волн. Тут все зависит от задачи: нужно формировать 3D картинку — тепловизор; всепогодную круглосуточную картинку высокого разрешения — миллиметровый радар; высокое разрешение не горит — сантиметровый радар.

Arxitektor
10.09.2016 11:40Довольно старый ролик о спец шаси
https://www.youtube.com/watch?v=bbnmwJbX5JI

SADKO
11.09.2016 19:16Не скажу, что я пипец какой пилот, но нефиг садиться скорость не погасив, и бросать вертолёт тоже не надо.
Реальные вертолёты, в отличии от моделек, достаточно инертны даже вблизи земли, и удерживать их в разы проще, но на нервах играет, по этому люди с маленьким налётом иногда жестко «бросают» вертолёт, им так спокойней, но спокойствие это всего-лишь иллюзия…semfromshire
11.09.2016 23:05что-то не уловил мысль. То есть, говорите, если гасить скорость, то и вихрь от винта не поднимется? Что же тогда американцы все исследуют-разрабатывают, если вся проблема техникой посадки решается? Или вы о другом?
avkudrin
12.09.2016 11:45+1Тут вроде бы о военных применениях речь, где, возможно, приходится и садиться не погасив скорость и резко маневрировать вблизи поверхности.
semfromshire
12.09.2016 13:13А вот и российские лидары подоспели. Концерн «Швабе» и холдинг «Вертолеты России» (входит в «Ростех») представили первый вертолет Ми-17В-5, оснащенный оптико-электронной системой ГОЭС-321МК. (На картинке ГОЭС-321М).

ГОЭС-321МК построен на основе использования телевизионной камеры высокого разрешения Full HD и высокочувствительного тепловизионного датчика средней области инфракрасного спектра.
Как пояснил первый замгендиректора концерна «Швабе» Сергей Попов, пилоты вертолета смогут наблюдать на специальном дисплее в кабине четкую картинку местности, похожую на фотонегатив.
Ну что же… Это конечно не кодированное цветом изображение с миллиметровой РЛС, но уже что-то.

Roboserv
Какое зрение, синтетическое? Может все-же машинное или компьютерное зрение?
semfromshire
Суть — в наложении на итоговое изображение данных из нескольких источников. Почитайте статью — там описан принцип и картинки есть. Или вот здесь: https://en.wikipedia.org/wiki/Synthetic_vision_system
Roboserv
виноват, спасибо за ответ. Лучше бы удалить мой позорный комментарий :)