
За прошедшее время робот серьезно изменился. Как и обещал, хочу поделиться доработакми.
Итак, что было сделано:
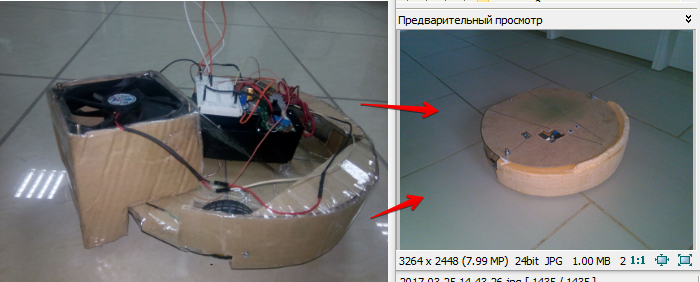
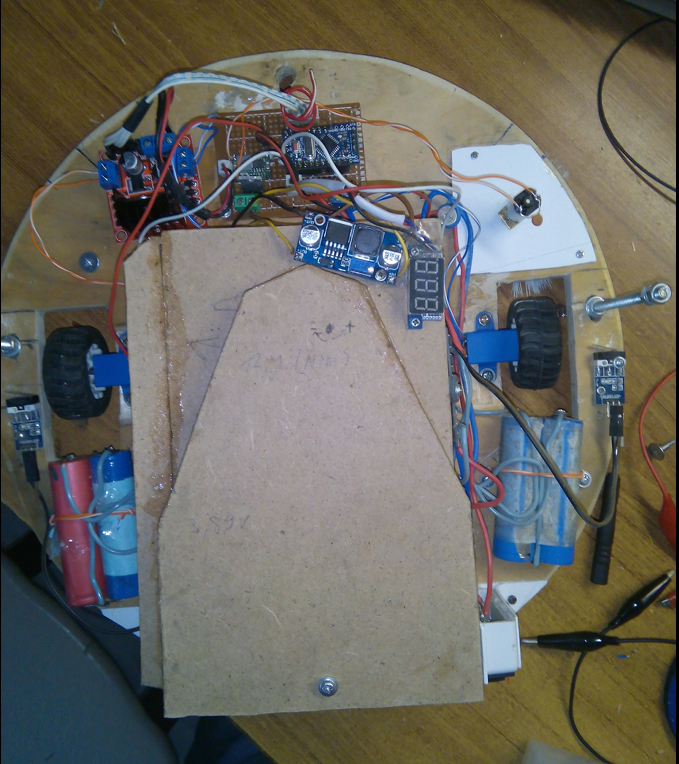
1. Вместо картонного основания теперь круг из фанеры 9мм — это позволило хорошо закреплять все детали робота, используя нормальные шурупы, а не стяжки.
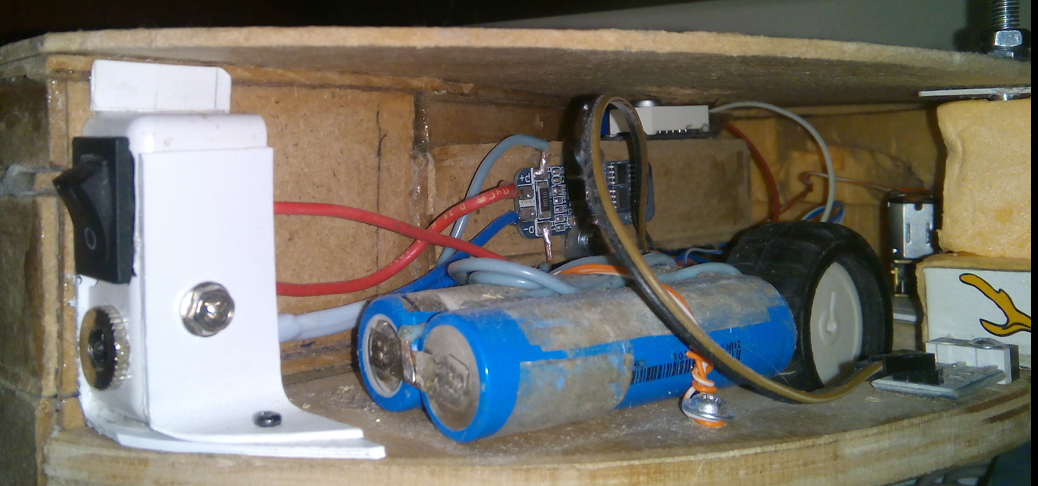
2. Следующим попал под переделку блок пылесоса. Мотор и турбину оставил ту же, но разместил их не «блином», а вынес турбину в переднюю часть корпуса. Такого я у самоделок еще не встречал. Эта хитрость позволила уменьшить высоту пылесоса до 8,5 см и он теперь пролезает даже под некоторые шкафы. Сам же корпус пылесоса собран заново из тонкого ДВП.
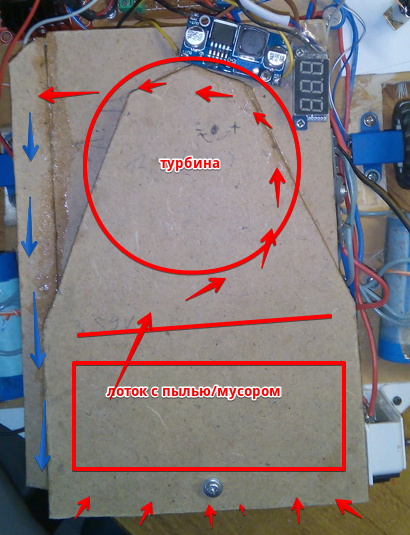
«Отработанный» воздух пришлось выводить за пределы корпуса из-за того, что он даже после фильтра достаточно пыльный, и вся эта пыль выдувалась прямехонько на левый мотор. Также на корпус «временно» повесил плату DC/DC step UP для повышения напряжения питания турбины. Входное напряжение +12V, но этого маловато для уверенного всасывания средней/крупной грязи. При напряжении около +16V тяга уже достаточна. Можно поднять и выше, но тогда и увеличится шумность. Также на корпус пылесоса (опять же «временно») закрепил вольтметр, чтоб примерно определить текущий заряд батарей.
3. Следующими под раздачу попали «желтые» мотор-редукторы. Не подходят они из-за большой шумности. Да и уменьшить скорость хода на этих моторах без потери в крутящем моменте у меня нормально не получилось — робот носился по комнате, пугая кошку )
На просторах интернета наткнулся на маленькие моторы N20, решил использовать их.
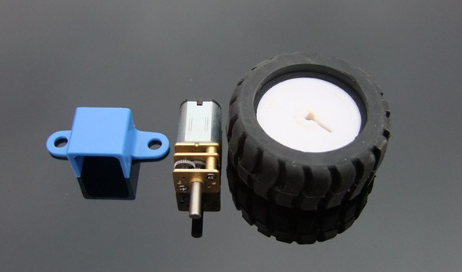
Но с ними приключились 2 неприятности: продавец почему-то прислал мне оба мотора с разным передаточным числом, а при установке их на платформу, они оказались очень шумными, даже хуже, чем те китайские желтые мотор-редукторы. Вероятно шум можно уменьшить, если сделать некий «демпфер» между мотором к корпусом, но я пока остановился на поиске других моторов, хоть с этими робот и перестал носиться по комнатам как угорелый ) Ну и пока проводил эксперименты, спалил маленький контроллер мотор-редукторов, в итоге поставил-таки L298N.
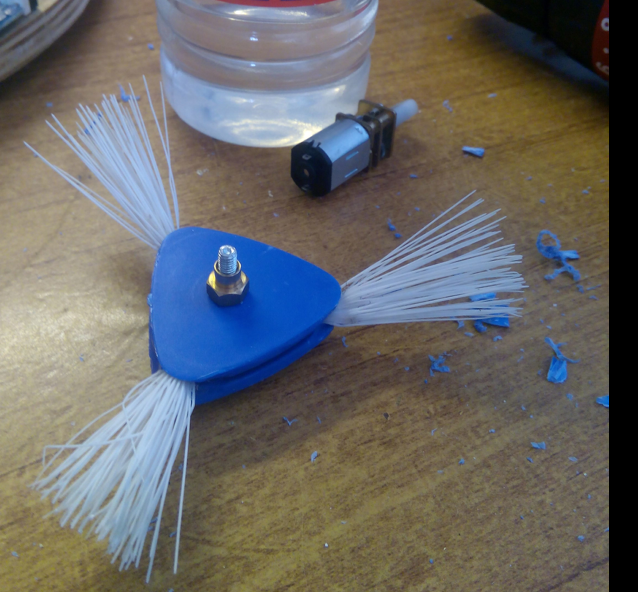
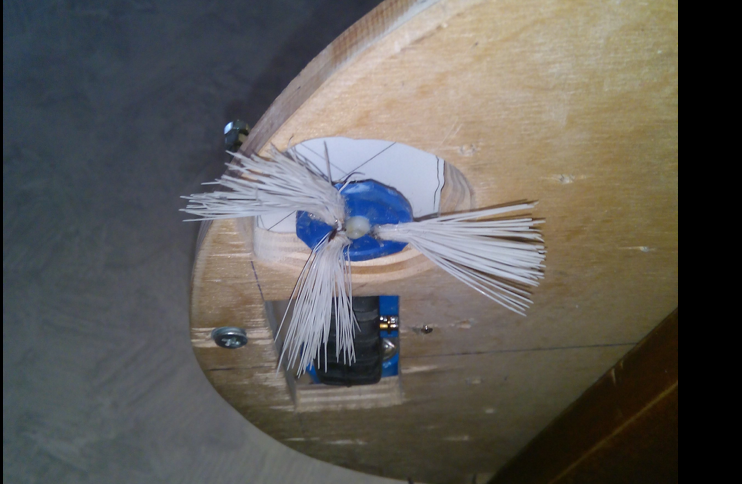
4. В роботе добавился еще один маленький мотор с щеткой. Щетку сделал из подручных средств.
5. Передний бампер. С ним пришлось повозиться, испробовав много разных вариантов. В итоге остановился на пеноплексе

Также в качестве датчиков стенки поставил самые простые концевики. Никаких дополнительных пружинок не понадобилось — кнопочки достаточно упруги, чтоб возвращать бампер обратно после соприкосновения с препятствием.
6. Установлен BMS-контроллер на 3 литиевых банки. Изначально хотел поставить 4, но BMS на 4 банки пришел бракованным, пока, опять же «временно», оставил так

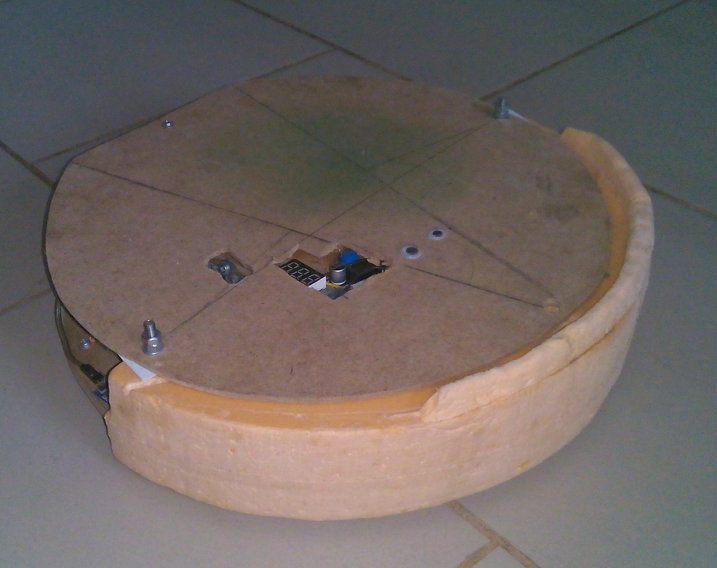
В итоге получился неплохой бюджетный, простой, но очень шумный робот-пылесос.
Если читатели подскажут, какие мотор/редукторы лучше использовать, буду признателен. Нужны нешумные, с питанием 3-12v, примерно 60 оборотов вала в минуту. Спасибо.
Комментарии (66)


Meklon
25.03.2017 17:30Могу я ненавязчиво порекомендовать сервисы лазерной резки фанеры?)) А вообще круто)

Phizio
25.03.2017 18:48+5Да что вы дизайн критикуете Автор, с исполнительными механизмами все понятно, а тема мозгов/прошивок не раскрыта! Или ничего не меняли в сравнении с картонной версией?

oleg363029
26.03.2017 01:47мотор/редукторы: http://robocraft.ru/shop/index.php?route=product/product&path=64&product_id=225
besitzeruf
26.03.2017 01:47-2Сколько времени ушло на все: разработка, ожидания деталей, сборка, тестирование, переделки…? Для безработного человека да, такой пылесос можно назвать бюджетным. Но если учитывать потраченное время на это… Уверяю, он далеко не бюджетный. Просьба не обижаться. Я просто стараюсь оценить все объективно. Лично я нашел на барахолке самые дешевые и внешний видем простые робот-пылесосы (например — SVC 8000, не реклама!), в которых используются оооочень старые микроконтроллеры. Ну и переделываю им железную начинку, добавляя логику (и продолжительное время работы), которых у них нет.

veydlin
26.03.2017 01:48Я недавно видел робота-пылесоса за 2к, ещё тогда подумал купить и сделать его умней, но в квартире слишком много мест где он будет бесполезен и я передумал
Может вам такой вариант будет предпочтительней? Уже готовый корпус, пылесборник и т.п. бери и модифицируй
ittakir
26.03.2017 07:06По моему, делать корпус робота пылесоса оправдано только если хочешь сделать его не простым блином, способным ездить только по ровной поверхности, а что-то типа марсианского ровера, чтобы он мог заезжать на лестницы, преодолевать пороги.
Иначе, гораздо быстрее и дешевле купить какой-нибудь дешевый китайский робот-пылесос, оставить исполнительные механизмы, а управляющую электронику поставить свою.iig
26.03.2017 09:53В дешёвом корпусе может запросто оказаться дешёвый пластик и одноразовая механика.

Cyl
31.03.2017 15:15Пересмотрел тонны материалов пылесборщиков, странная тенденция, все разработчики почему то возлагают навигацию на взаимодействие с сенсорикой и никто не задумался в сторону навигационных технологий в закрытых помещениях с применением картографии и колес Нила и. Посмотрите на Robots — KUKA https://www.youtube.com/watch?v=kN9a7W_hnSQ
Psychosynthesis
У меня боль в глазах, не могу камментить…
old_bear
это вы ещё первую статью не видели…