
Содержание
В прошлой части, удалось распарсить сайт Додо-пиццы и загрузить данные об ингредиентах, а самое главное — фотографии пицц. Всего в нашем распоряжении оказалось 20 пицц. Разумеется, формировать обучающие данные всего из 20 картинок не получится. Однако, можно воспользоваться осевой симметрией пиццы: выполнив вращение картинки с шагом в один градус и вертикальным отражением — позволяет превратить одну фотографию в набор из 720 изображений. Тоже мало, но всё же попытаемся.
Попробуем обучить Условный вариационный автоэнкордер (Conditional Variational Autoencoder), а потом перейдёт к тому, ради чего это всё и затевалось — генеративным cостязательным нейронным сетям (Generative Adversarial Networks).
CVAE — условный вариационный автоэнкордер
Для разбирательства с автоэнкодерами, поможет отличная серия статей:
- Автоэнкодеры в Keras, Часть 3: Вариационные автоэнкодеры (VAE)
- Автоэнкодеры в Keras, Часть 4: Conditional VAE
Настоятельно рекомендую к прочтению.
Здесь же перейдём сразу к делу.
Отличие CVAE от VAE — состоит в том, что нам нужно на вход как энкодеру, так и декодеру, дополнительно подавать еще метку. В нашем случае — меткой будет вектор рецепта, который получаем от OneHotEncoder.
Однако, тут возникает нюанс — а в какой момент имеет смысл подавать нашу метку?
Я попробовал два метода:
- в конце — после всех свёрток — перед полносвязным слоем
- в начале — после первой свёртки — добавляется как дополнительный канал
В принципе, оба способа имеют право на существование. Кажется логичным, что если добавлять метку в конце, то она будет привязываться к более высокоуровневым фичам изображения. И наоборот — если добавлять её в начале, то она будет привязана к более низкоуровневым фичам. Попробуем сравнить оба способа.
Вспомним, что рецепт состоит максимум из 9 ингредиентов. А их всего — 28. Получается, код рецепта будет представлять собой матрицу 9х29, а если вытянуть её, то получится 261-мерный вектор.
Для изображения, размером 32х32, выберем размер скрытого пространства равным 512.
Можно выбрать и меньше, но как будет видно далее — это приводит к более смазанному результату.
Код для энкодера с первым методом добавления метки — после всех свёрток:
def create_conv_cvae(channels, height, width, code_h, code_w):
input_img = Input(shape=(channels, height, width))
input_code = Input(shape=(code_h, code_w))
flatten_code = Flatten()(input_code)
latent_dim = 512
m_height, m_width = int(height/4), int(width/4)
x = Conv2D(32, (3, 3), activation='relu', padding='same')(input_img)
x = MaxPooling2D(pool_size=(2, 2), padding='same')(x)
x = Conv2D(16, (3, 3), activation='relu', padding='same')(x)
x = MaxPooling2D(pool_size=(2, 2), padding='same')(x)
flatten_img_features = Flatten()(x)
x = concatenate([flatten_img_features, flatten_code])
x = Dense(1024, activation='relu')(x)
z_mean = Dense(latent_dim)(x)
z_log_var = Dense(latent_dim)(x)Код для энкодера со вторым методом добавления метки — после первой свёртки — как дополнительный канал:
def create_conv_cvae2(channels, height, width, code_h, code_w):
input_img = Input(shape=(channels, height, width))
input_code = Input(shape=(code_h, code_w))
flatten_code = Flatten()(input_code)
latent_dim = 512
m_height, m_width = int(height/4), int(width/4)
def add_units_to_conv2d(conv2, units):
dim1 = K.int_shape(conv2)[2]
dim2 = K.int_shape(conv2)[3]
dimc = K.int_shape(units)[1]
repeat_n = dim1*dim2
count = int( dim1*dim2 / dimc)
units_repeat = RepeatVector(count+1)(units)
#print('K.int_shape(units_repeat): ', K.int_shape(units_repeat))
units_repeat = Flatten()(units_repeat)
# cut only needed lehgth of code
units_repeat = Lambda(lambda x: x[:,:dim1*dim2], output_shape=(dim1*dim2,))(units_repeat)
units_repeat = Reshape((1, dim1, dim2))(units_repeat)
return concatenate([conv2, units_repeat], axis=1)
x = Conv2D(32, (3, 3), activation='relu', padding='same')(input_img)
x = add_units_to_conv2d(x, flatten_code)
#print('K.int_shape(x): ', K.int_shape(x)) # size here: (17, 32, 32)
x = MaxPooling2D(pool_size=(2, 2), padding='same')(x)
x = Conv2D(16, (3, 3), activation='relu', padding='same')(x)
x = MaxPooling2D(pool_size=(2, 2), padding='same')(x)
x = Flatten()(x)
x = Dense(1024, activation='relu')(x)
z_mean = Dense(latent_dim)(x)
z_log_var = Dense(latent_dim)(x)Код декодера в обоих случаях совпадает — метка добавляется в самом начале.
z = Input(shape=(latent_dim, ))
input_code_d = Input(shape=(code_h, code_w))
flatten_code_d = Flatten()(input_code_d)
x = concatenate([z, flatten_code_d])
x = Dense(1024)(x)
x = Dense(16*m_height*m_width)(x)
x = Reshape((16, m_height, m_width))(x)
x = Conv2D(16, (3, 3), activation='relu', padding='same')(x)
x = UpSampling2D((2, 2))(x)
x = Conv2D(32, (3, 3), activation='relu', padding='same')(x)
x = UpSampling2D((2, 2))(x)
decoded = Conv2D(channels, (3, 3), activation='sigmoid', padding='same')(x)Число параметров сети:
- 4'221'987
- 3'954'867
Скорость обучения на одну эпоху:
- 60 сек
- 63 сек
Результат после 40 эпох обучения:
- loss: -0.3232 val_loss: -0.3164
- loss: -0.3245 val_loss: -0.3191
Как видим, второй метод требует меньше памяти для ИНС, даёт лучше результат, но требует чуть больше времени для обучения.
Осталось визуально сравнить результаты работы.
- Исходное изображение (32х32)
- Результат работы — первый метод (latent_dim = 64)
- Результат работы — первый метод (latent_dim = 512)
- Результат работы — второй метод (latent_dim = 512)




А теперь посмотрим, как выглядит применение переноса стиля для пиццы, когда кодирование пиццы осуществляется с оригинальным рецептом, а декодирование с другим.
i = 0
for label in labels:
i += 1
lbls = []
for j in range(batch_size):
lbls.append(label)
lbls = np.array(lbls, dtype=np.float32)
print(i, lbls.shape)
stt_imgs = stt.predict([orig_images, orig_labels, lbls], batch_size=batch_size)
save_images(stt_imgs, dst='temp/cvae_stt', comment='_'+str(i))Результат работы переноса стиля (второй метод кодирования):

GAN — генеративная cостязательная сеть
Мне не удалось найти устоявшегося русскоязычного названия подобных сетей.
Варианты:
- генеративные соревновательные сети
- порождающие соперничающие сети
- порождающие соревнующиеся сети
Мне больше нравится:
- генеративные cостязательные сети
С теорией работы GAN опять поможет отличная серия статей:
- Автоэнкодеры в Keras, Часть 5: GAN(Generative Adversarial Networks) и tensorflow
- Автоэнкодеры в Keras, часть 6: VAE + GAN
А для более глубокого понимания — свежая статья в блоге ODS: Нейросетевая игра в имитацию
Однако, начав разбираться и пробовать самостоятельно реализовать генеративную нейронную сеть — я столкнулся с некоторыми сложностями. Например, были моменты, когда генератор выдавал по-настоящему психоделические картинки.
Разобраться в реализации помогли разные примеры:
MNIST Generative Adversarial Model in Keras ( mnist_gan.py ),
рекомендации по архитектуре из статьи конца 2015 года от facebook research про DCGAN (Deep Convolutional GAN):
Unsupervised Representation Learning with Deep Convolutional Generative Adversarial Networks
а так же набор рекомендаций, позволяющий заставить GAN работать:
How to Train a GAN? Tips and tricks to make GANs work.
Конструирование GAN:
def make_trainable(net, val):
net.trainable = val
for l in net.layers:
l.trainable = val
def create_gan(channels, height, width):
input_img = Input(shape=(channels, height, width))
m_height, m_width = int(height/8), int(width/8)
# generator
z = Input(shape=(latent_dim, ))
x = Dense(256*m_height*m_width)(z)
#x = BatchNormalization()(x)
x = Activation('relu')(x)
#x = Dropout(0.3)(x)
x = Reshape((256, m_height, m_width))(x)
x = Conv2DTranspose(256, kernel_size=(5, 5), strides=(2, 2), padding='same', activation='relu')(x)
x = Conv2DTranspose(128, kernel_size=(5, 5), strides=(2, 2), padding='same', activation='relu')(x)
x = Conv2DTranspose(64, kernel_size=(5, 5), strides=(2, 2), padding='same', activation='relu')(x)
x = Conv2D(channels, (5, 5), padding='same')(x)
g = Activation('tanh')(x)
generator = Model(z, g, name='Generator')
# discriminator
x = Conv2D(128, (5, 5), padding='same')(input_img)
#x = BatchNormalization()(x)
x = LeakyReLU()(x)
#x = Dropout(0.3)(x)
x = MaxPooling2D(pool_size=(2, 2), padding='same')(x)
x = Conv2D(256, (5, 5), padding='same')(x)
x = LeakyReLU()(x)
x = MaxPooling2D(pool_size=(2, 2), padding='same')(x)
x = Conv2D(512, (5, 5), padding='same')(x)
x = LeakyReLU()(x)
x = MaxPooling2D(pool_size=(2, 2), padding='same')(x)
x = Flatten()(x)
x = Dense(2048)(x)
x = LeakyReLU()(x)
x = Dense(1)(x)
d = Activation('sigmoid')(x)
discriminator = Model(input_img, d, name='Discriminator')
gan = Sequential()
gan.add(generator)
make_trainable(discriminator, False) #discriminator.trainable = False
gan.add(discriminator)
return generator, discriminator, gan
gan_gen, gan_ds, gan = create_gan(channels, height, width)
gan_gen.summary()
gan_ds.summary()
gan.summary()
opt = Adam(lr=1e-3)
gopt = Adam(lr=1e-4)
dopt = Adam(lr=1e-4)
gan_gen.compile(loss='binary_crossentropy', optimizer=gopt)
gan.compile(loss='binary_crossentropy', optimizer=opt)
make_trainable(gan_ds, True)
gan_ds.compile(loss='binary_crossentropy', optimizer=dopt)Как видим, дискриминатор – это обычный бинарный классификатор, который выдаёт:
1 — для реальных картинок,
0 — для поддельных.
Процедура обучения:
- получаем порцию реальных картинок
- генерируем шум, на базе которого генератор генерирует картинки
- формируем батч для обучения дискриминатора, который состоит из реальных картинок (им присваивается метка 1) и подделок от генератора (метка 0)
- обучаем дискриминатор
- обучаем GAN (в нём обучается генератор, т.к. обучение дискриминатора отключено), подавая на вход шум и ожидая на выходе метку 1.
for epoch in range(epochs):
print('Epoch {} from {} ...'.format(epoch, epochs))
n = x_train.shape[0]
image_batch = x_train[np.random.randint(0, n, size=batch_size),:,:,:]
noise_gen = np.random.uniform(-1, 1, size=[batch_size, latent_dim])
generated_images = gan_gen.predict(noise_gen, batch_size=batch_size)
if epoch % 10 == 0:
print('Save gens ...')
save_images(generated_images)
gan_gen.save_weights('temp/gan_gen_weights_'+str(height)+'.h5', True)
gan_ds.save_weights('temp/gan_ds_weights_'+str(height)+'.h5', True)
# save loss
df = pd.DataFrame( {'d_loss': d_loss, 'g_loss': g_loss} )
df.to_csv('temp/gan_loss.csv', index=False)
x_train2 = np.concatenate( (image_batch, generated_images) )
y_tr2 = np.zeros( [2*batch_size, 1] )
y_tr2[:batch_size] = 1
d_history = gan_ds.train_on_batch(x_train2, y_tr2)
print('d:', d_history)
d_loss.append( d_history )
noise_gen = np.random.uniform(-1, 1, size=[batch_size, latent_dim])
g_history = gan.train_on_batch(noise_gen, np.ones([batch_size, 1]))
print('g:', g_history)
g_loss.append( g_history )Обратите внимание, что, в отличие от вариационного автоэнкодера, для обучение генератора не используются реальные изображения, а только метка дискриминатора. Т.е. генератор обучается на градиентах ошибки от дискриминатора.
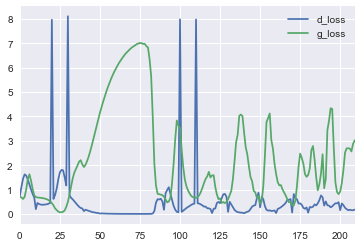
Самое интересное, что название состязательные сети — не для красивого слова — они действительно cостязаются и следить за показаниями loss-ов дискриминатора и генератора даже увлекательно.
Если посмотреть на кривые потерь, то видно, что дискриминатор быстро обучается отличать реальную картинку от первоначального мусора, выдаваемого генератором, но потом кривые начинают колебаться — генератор учится генерировать всё более подходящее изображение.
gif-ка показывающая процесс обучения генератора (32x32) на одной пицце (первая пицца в списке — Двойная пепперони):

Как и ожидалось, результат работы GAN, по сравнению с вариационным энкодером, даёт более чёткое изображение.
CVAE + GAN — условный вариационный автоэнкордер и генеративная cостязательная сеть
Осталось объединить CVAE и GAN вместе, чтобы получить лучшее от обоих сетей. В основе объединения лежит простая идея — декодер VAE выполняет ровно ту же функцию, что и генератор GAN, однако выполняют и обучаются они ей по-разному.
Кроме того, что не до конца понятно — как всё это заставить работать вместе, мне так же не было ясно — как в Keras-е можно применять разные функции потерь. Разобраться в этом вопросе помогли примеры на гитхабе:
Так, применение разных функций потерь в Keras-е можно реализовать добавлением своего слоя ( Writing your own Keras layers ), в методе call() которого и реализовать требуемую логику рассчёта c последующим вызовом метода add_loss().
Пример:
class DiscriminatorLossLayer(Layer):
__name__ = 'discriminator_loss_layer'
def __init__(self, **kwargs):
self.is_placeholder = True
super(DiscriminatorLossLayer, self).__init__(**kwargs)
def lossfun(self, y_real, y_fake_f, y_fake_p):
y_pos = K.ones_like(y_real)
y_neg = K.zeros_like(y_real)
loss_real = keras.metrics.binary_crossentropy(y_pos, y_real)
loss_fake_f = keras.metrics.binary_crossentropy(y_neg, y_fake_f)
loss_fake_p = keras.metrics.binary_crossentropy(y_neg, y_fake_p)
return K.mean(loss_real + loss_fake_f + loss_fake_p)
def call(self, inputs):
y_real = inputs[0]
y_fake_f = inputs[1]
y_fake_p = inputs[2]
loss = self.lossfun(y_real, y_fake_f, y_fake_p)
self.add_loss(loss, inputs=inputs)
return y_realgif-ка показывающая процесс обучения (64x64):

Результат работы переноса стиля:
А теперь самое интересное!
Собственно ради чего это всё и затевалось — генерация пиццы по выбранным ингредиентам.
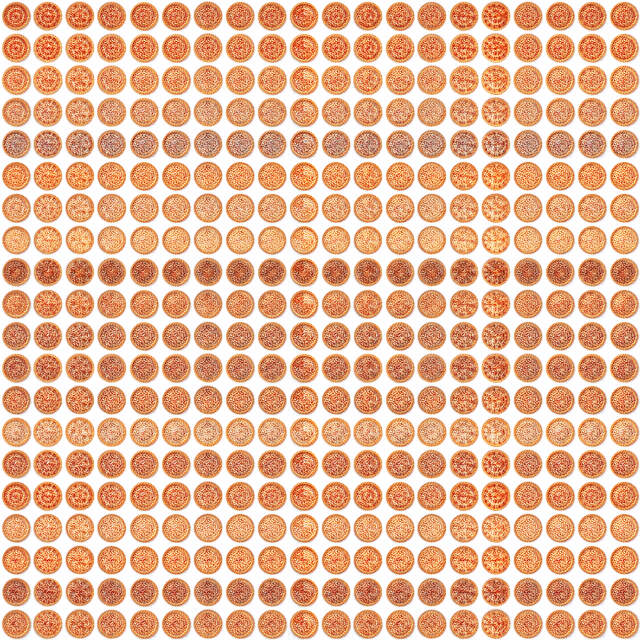
Посмотрим на пиццы с рецептом, состоящим из одного ингредиента (т.е. с кодами от 1 до 27):
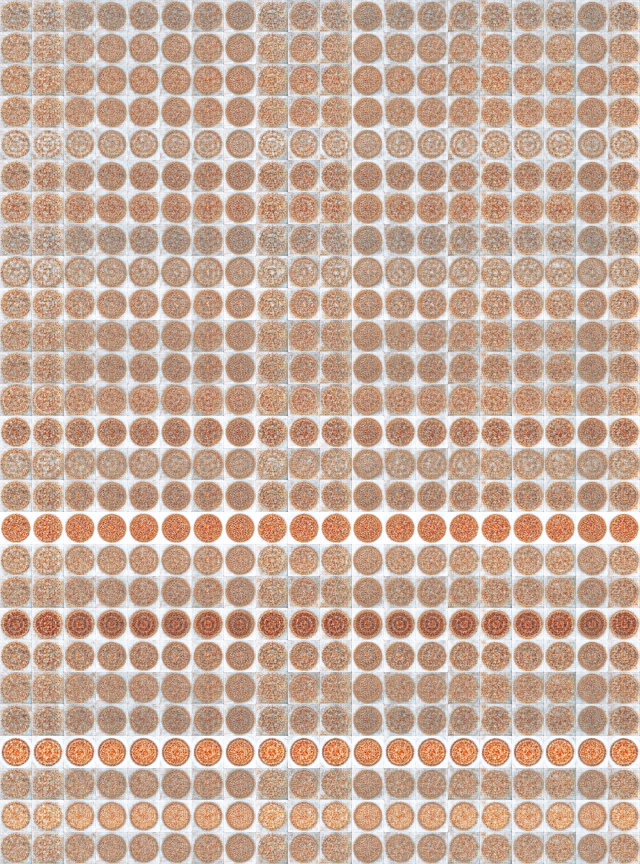
Как и следовало ожидать — более-менее смотрятся только пиццы с самыми популярными ингредиентами 24, 20, 17 (томаты, пепперони, моцарелла) — все остальные варианты — это что-то мутное с круглой формой и непонятными серыми пятнами, в которых только при желании можно попытаться что-то угадать.
Заключение
В целом, эксперимент можно признать частично удавшимся. Однако, даже на таком игрушечном примере чувствуется, что пафосное выражение: "данные — это новая нефть" — имеет право на существование, особенно применительно к машинному обучению.
Ведь качество работы приложения на базе машинного обучения, в первую очередь зависит от качества и количества данных.
Генеративные сети — это действительно очень интересно и, думается, что в обозримом будущем мы ещё увидим множество самых различных примеров их применения.
Кстати, возникает хороший вопрос: если права на фотографии принадлежат их создателю, то кому принадлежат права на картинку, которую создаёт нейронная сеть?
Большое спасибо за внимание!
NB. При написании этой статьи — ни одна пицца не пострадала.
Ссылки
- Автоэнкодеры в Keras, Часть 3: Вариационные автоэнкодеры (VAE)
- Автоэнкодеры в Keras, Часть 4: Conditional VAE
- Автоэнкодеры в Keras, Часть 5: GAN(Generative Adversarial Networks) и tensorflow
- Автоэнкодеры в Keras, часть 6: VAE + GAN
- Deep Convolutional GANs (DCGAN): Unsupervised Representation Learning with Deep Convolutional Generative Adversarial Networks
- How to Train a GAN? Tips and tricks to make GANs work
- Keras VAEs and GANs
- MNIST Generative Adversarial Model in Keras ( mnist_gan.py )
- Generative Adversarial Networks Part 2 — Implementation with Keras 2.0
- Generative Adversarial Networks with Keras
- GAN by Example using Keras on Tensorflow Backend
- Keras implementation of Deep Convolutional Generative Adversarial Networks (DCGAN)
- Генеративные модели от OpenAI
- Нейросетевая игра в имитацию
napa3um
Мне кажется, что изначально задача сдизайнена неверно, входных данных недостаточно, чтобы выдать приемлемый результат (не сформулировано никаких явных или неявных моделей смешивания ингредиентов, в которых бы нейросеть подбирала параметры, вы пытаетесь заставить нейросеть создать модель, что сделать они в принципе не способны).
masai
GAN именно так и работают. Есть образцы, как должны выглядеть пицца, а сеть старается выдавать что-то, похожее на пиццу. Модели смешивания ингредиентов в данном случае не нужны.
napa3um
Нет, даже GAN не избавляет от необходимости задавать (явно или не явно) модель, по которой она будет давать результат.