
Затем технология перекочевала на службу нефтегазовым магнатам для построения и обслуживания океанических добывающих платформ.
Следующая веха — поиски «Титаника» (но на самом деле это была замаскированная подводная разведка). Но все же эти экспедиции принесли немалую пользу в гражданских и научных целях.
Чтобы привлечь молодежь в индустрию, в 1998 году американцы начали проводить международный студенческий конкурс, а в 2013 стартовал открытый чемпионат Азии в Сингапуре.
Цена входа в индустрию постепенно снижалась: сначала были только военные бюджеты, потом пришли нефтяные корпорации, за ними — университеты и наконец, на сцене появились open source проекты стоимостью от 500$ для «гаражных стартапов». А сейчас даже есть DIY-конструктор подводных беспилотников для школьников.

Содержание
1. Как искали термоядерную бомбу на дне испанского моря
2. Океанические нефтеплатформы
3. «Титаник» и секретная подводная разведка
4. Международные соревнования: США и Сингапур
5. Open source проекты, краудсорсинг и конструктор для школьников
6. Достижения российских студенческих команд
Поиск термоядерной бомбы

Термоядерная бомба B28RI, поднятая с глубины 869 метров.
Авиакатастрофа над Паломаресом.
Журнал «Тайм» включил инцидент в список наиболее серьёзных ядерных катастроф.
17 января 1966 года американский стратегический бомбардировщик B-52G с термоядерным оружием на борту столкнулся с самолетом-топливозаправщиком KC-135 во время дозаправки в воздухе. В результате катастрофы погибли 7 человек и были потеряны четыре термоядерные бомбы. Три из них приземлились на суше и были найдены сразу, четвёртая, упавшая в море — лишь после двухмесячных поисков.
В состав группы поиска входили эксперт по водолазным работам капитан Уиллард Сирл и математик, доктор Джон Крейвен, который при помощи байесовской теории эффективного нахождения потерянных объектов составил план поисков.

Оболочки двух термоядерных бомб B28 из Паломареса.
Для проведения поисковых работ была сформирована эскадра ВМС США из 34 кораблей, на которых находилось свыше трёх тысяч военных моряков и гражданских контрактников. Для исследования дна на малых глубинах до 24 метров использовались аквалангисты; водолазы в жёстких скафандрах работали на глубинах до 120 метров. Поиски на больших глубинах выполнялись подводными пилотируемыми аппаратами «Алвин» и «Алюминаут».

Алвин — один из известнейших действующих пилотируемых подводных аппаратов (ППА). Батискаф рассчитан на трёх человек (двоих учёных и пилота) и позволяет за 10 часов совершать погружение на глубину до 4500 метров.

Первая в мире алюминиевая подводная лодка Aluminaut, 1964 года. На ней, кстати, потом гонял Жак Кусто.
Бомба была обнаружена «Алвином» на глубине почти 800 метров. Бомба лежала на 70-градусном склоне разлома, глубина которого доходила до 1300 метров. Первая попытка поднять ее, предпринятая 26 марта, привязав трос к парашютным стропам, оказалась неудачной. Бомба сорвалась, и её вновь потеряли. Она была обнаружена 2 апреля. 5 апреля возникла серьёзная аварийная ситуация, когда «Алвин» запутался в парашюте, пилоты аппарата потеряли обзор и не могли освободиться в течение 15 минут.
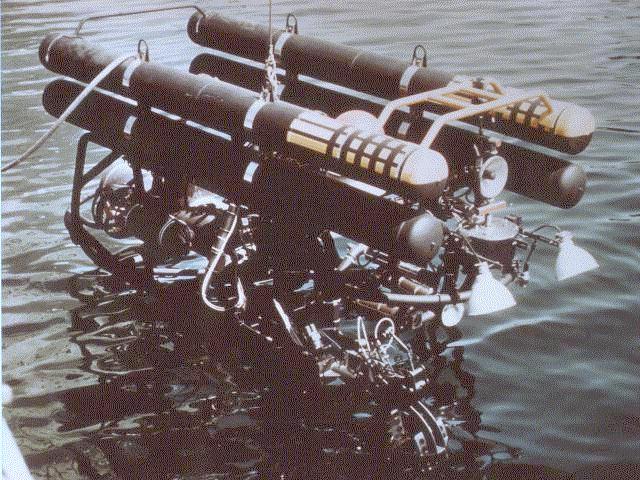
Дистанционно управляемый аппарат сable-controlled Undersea Recovery Vehicle (CURV).
После этого инцидента для дальнейших работ использовался дистанционно управляемый необитаемый аппарат CURV. 7 апреля с помощью аппарата удалось прикрепить два троса к парашюту, но при попытке завести третий трос CURV также запутался и потерял управление. Попытки освободить его закончились неудачей, и было принято решение поднимать бомбу вместе с аппаратом на двух тросах. Попытка закончилась успешно, и бомба была поднята на палубу спасательного корабля «Петрель» через 81 день после катастрофы.

По утверждению газеты «Нью-Йорк Таймс», это был первый в истории случай публичной демонстрации ядерного оружия.
Военные продолжили разработки в области телеуправляемых и автономных аппаратов. Тем временем на технологию положили глаз нефтяники.
Обслуживание нефтегазовой отрасли и добывающих платформ

«Телеуправляемые необитаемые подводные аппараты» (ТНПА, ROV) стали набирать популярность в 1980-х годах, когда большая часть новой нефтегазовой разработки на шельфе превысила возможности водолазов. Но в середине 80-х годов индустрия морских ТНПА пострадала от серьезного застоя в технологическом развитии, вызванного, в частности, падением цен на нефть и глобальным экономическим спадом.
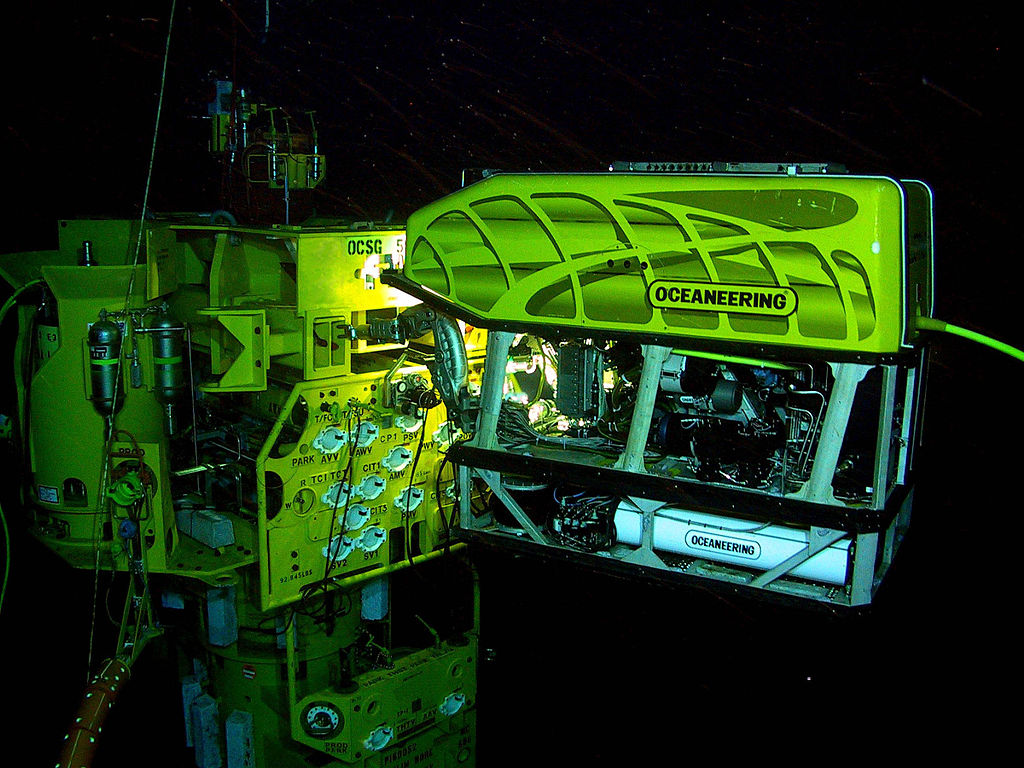
ROV в действии на подводном нефтегазовом месторождении. ТНПА крутит гайки на подводной конструкции.

ТНПА подобные этому, широко применяются в шельфовой добыче. Новые технологии позволяют роботам погружаться еще глубже.
Вот, кстати, легендарное видео, как акула кусает подводный кабель:
Титаник

Титаник затонул 15 апреля 1912 года. Попытки его отыскать предпринимались в 1953, в 1966, в 1970 и в 1980 годах. (Подробнее тут.)
Согласно накладным, на «Титанике» перевозили коллекцию драгоценностей на сумму около 300 миллионов долларов. Кроме того, на борту находились оригиналы рубаи Омара Хайяма, а также мумия древнеегипетской принцессы.
Роберт Баллард обнаружил «Титаник» в 1985 году. Хотя эта «экспедиция» была всего лишь прикрытием. Операция была профинансирована ВМС США для секретной разведки двух затонувших в 1960-е годы атомных подводных лодок USS Scorpion и USS Thresher, а не «Титаника». Подлодки затонули в 1963 и 1968 годах, соответственно, и военно-морские силы хотели выяснить, имела ли место утечка радиации.
ANGUS — это куча видеокамер и фотоаппаратов, буксируемых судном под водой на тросе:
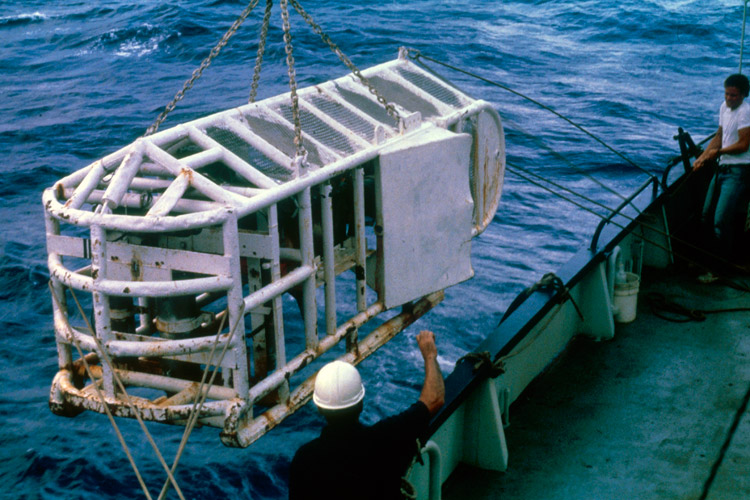
ANGUS (Acoustically Navigated Geological Underwater Survey). Этот аппарат имел недостатки: не был достаточно оперативен. Отснятый материал можно было проявить и изучить только после подъема аппарата на поверхность.
Создатели этого аппарата были те еще приколисты. Инженеры ласково называли аппарат «дурачком на веревочке» из-за отсутствия даже самых простых способов управления. Лозунгом команды ANGUS была фраза «Хоть и протекает, но тикать продолжает».
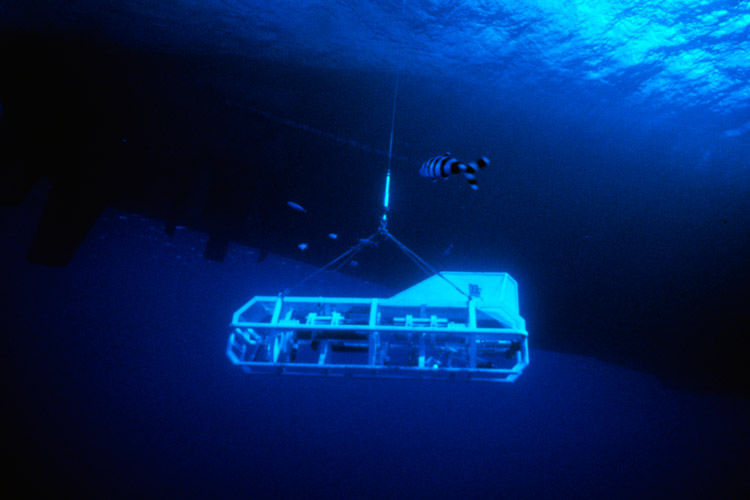
«Арго», как и ANGUS, представлял собой металлическую конструкцию, оснащенную пятью видеокамерами и двумя гидроакустическими системами.
1 сентября 1985 года монитор, связанный с видеокамерой «Арго», показал объекты неприродного происхождения. На следующий день был обнаружен корпус «Титаника», и на дно был отправлен ANGUS для проведения фотосъемки.
В следующие четыре дня «Арго» и ANGUS сделали тысячи фотографий. Обломки «Титаника» были разбросаны на площади радиусом в 1600 метров на глубине около 3800 метров.
12 июля 1986 года Баллард совершает вторую экспедицию к «Титанику». Теперь у него в распоряжении батискаф «Алвин» на трех человек и телеуправляемый робот Jason Jr.
.jpg)
«Алвин» — один из известнейших действующих пилотируемых подводных аппаратов (ППА). Батискаф рассчитан на трёх человек (двоих учёных и пилота) и позволяет за 10 часов совершать погружение на глубину до 4500 метров.

Аппарат «Ясон Джуниор» (Jason Jr)

Исследование «Титаника» с помощью аппарата «Ясон Джуниор».
В 1987 National Geographic Channel сняли документальный фильм поисках «Титаника», его посмотрел Джеймс Кэмерон и вдохновился на создание своего шедевра.
Кэмерон в сентябре 1995 года лично совершил 12 погружений к «Титанику» на батискафах «Мир-1» и «Мир-2», находившихся на борту российского научно-исследовательского судна «Академик Мстислав Келдыш», позднее также задействованного в фильме.
Фильм «Титаник» стоил больше, чем сам корабль. Строительство корабля обошлось в 4 000 000 фунтов, что в современных деньгах составляет 100 000 000 фунтов, а стоимость фильма Джеймса Кэмерона — 125 000 000 фунтов.
Международные соревнования
Конкурсы — это отличная игровая механика, которая привлекает молодежь и позволяет «профориентировать» много специалистов в интересующую область. Появление международных конкурсов — важная веха развития подводных беспилотников и формирования индустрии и рынка.
RoboSub
Международные соревнования проводятся с 1998 года проводится на базе Центра космических и военно-морских систем США.
Сайт — www.robonation.org/competition/robosub
Правила 2017 года (PDF).

В конкурсе RoboSub участвуют автономные подводные аппараты (AUVs), и выполняют реалистичные миссии в требовательной подводной среде.

Основанный Международной ассоциацией разработчиков систем необитаемых (unmanned) аппаратов, Фонд AUVSI представляет собой некоммерческую организацию, которая предоставляет студентам возможность поучаствовать в практических мероприятиях в сфере робототехники, направленных на стимуляцию и поддержание их интереса к науке, технологиям, инженерии и математике (STEM).

Каждый год Фонд AUVSI предлагает ряд образовательных программ, а также робототехнических соревнований, которые позволяют студентам применить свое техническое образование за пределами аудитории. Такие мероприятия — идеальная подготовка к профессиональной деятельности, поэтому участвующим в них студентам часто предлагают желанную стажировку и трудоустройство еще до окончания вуза.
Singapore AUV challenge (SAUVC)
Открытый чемпионат Азии по подводной робототехнике Singapore AUV Challenge (SAUVC), cоревнования проводятся в Сингапуре c 2013 года.
Сайт — www.sauvc.org
Страница на Facebook.
Правила 2018.
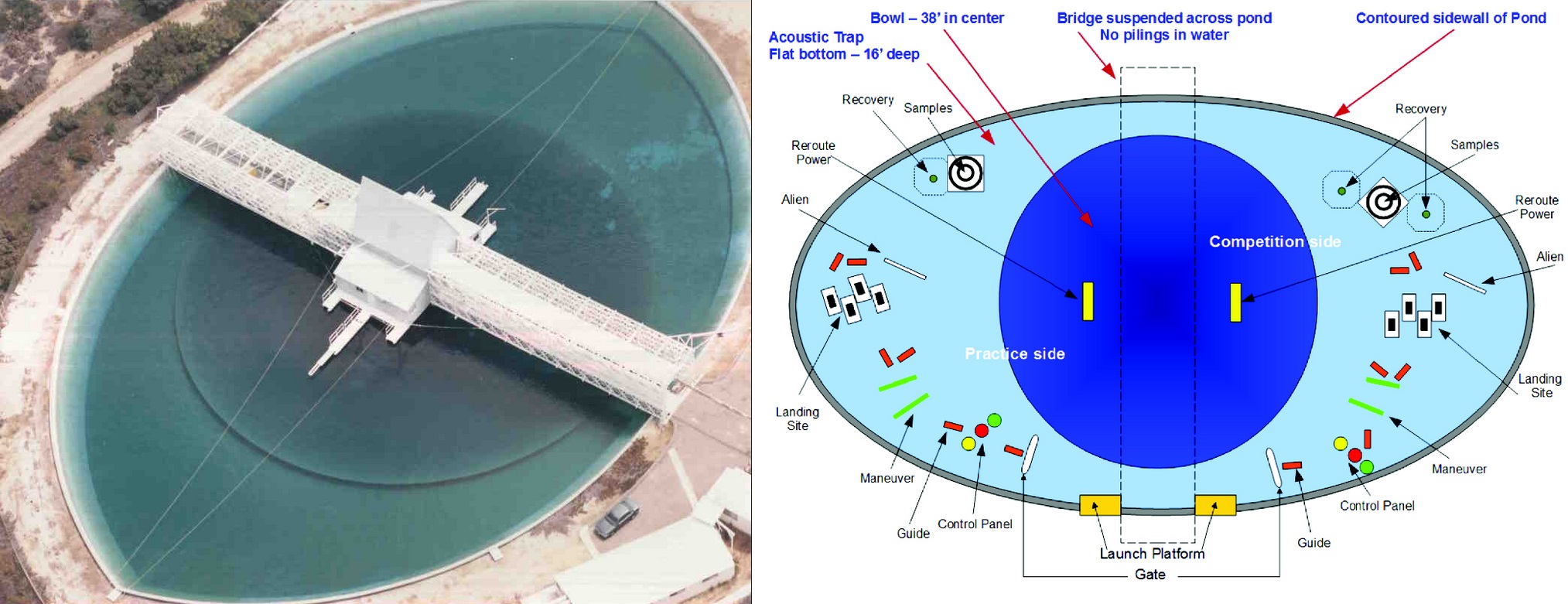
Вот как своими словами описывает задание участник соревнований 2013 года:
«Задание примерно можно описать так: нужно идти над чёрной полоской на дне бассейна и в определённый момент всплыть. То есть, такой line-following robot. Правила, правда, несколько мутновато описывают всё это дело. Там есть какие-то ворота, через которые надо пройти. Но если хорошо идти над полоской, то через них пройдёшь автоматически. Еще там есть стойка, на которой стоит шарик, и его надо пнуть. Опять же, если идти хорошо над полоской и на правильной высоте, то при очередном повороте шарик пнёшь автоматически. И всплыть нужно в правильном месте — когда закончится чёрная полоска. В общем, всё соревнование крутилось вокруг чёрной полоски на дне :-).»
Подробный рассказ про 2013 год в подводной робототехнике тут.

OpenROV
«Гаражный стартап» — так начиналась история Hewlett-Packard и Apple, а также множества других проектов Кремниевой долины. Когда технология становится доступной «хакерам», они начинают самостоятельно экспериментировать и находить потрясающие решения.
В 2012 году на Кикстартере был запущен проект OpenROV — дистанционно-управляемый мини-подводный робот весом около 2,5 кг. Он управляется с ноутбука, укомплектован видеокамерой с подсветкой. Глубина погружения: до 100 метров, время работы от аккумуляторов: ~1,5 часа. В движение он приводится тремя бесколлекторными двигателями (800Kv Brushless motor): два в горизонтальной и один в вертикальной плоскости. Для получения визуальной картинки используется обычная web-камера (Microsoft LifeCam HD-5000), которая через USB подключается к BeagleBone.
Набор поставляется в виде запчастей, которые надо собрать. Разработчики проекта ставили перед собой цель сделать подводные исследования дешевыми и общедоступными, по принципам open source software и open source hardware. Чертежи доступны на GitHub.
Выступление на TED:

В качестве бортового компьютера используется Beagle board.
Trident 2016 (следующая версия OpenROV)

Стартап OpenROV, США собирает средства на создание подводного телеуправляемого аппарата (ROV) Trident. Компания планировала собрать $50 тысяч, но вместо этого привлекла уже более $560 тысяч.
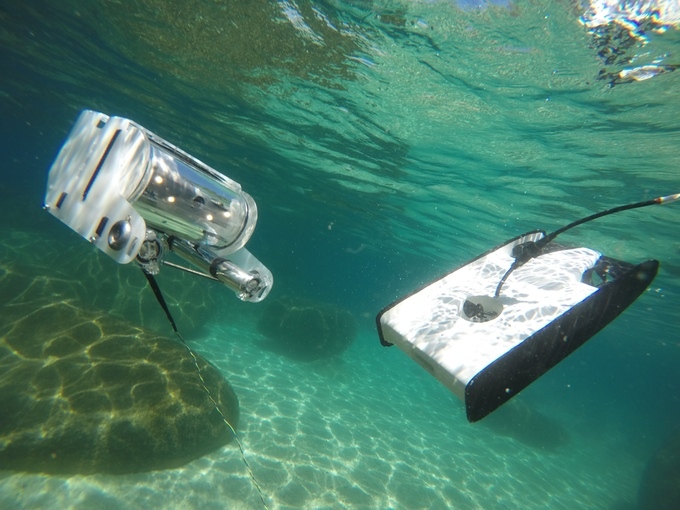
Дроны OpenROV 2.8 и Trident
Дальность управления — до 100 метров. Масса — 2,9 кг. Максимальная скорость — 2 м/с. Время работы от батарей — 3 часа. Поддержка автоматического зависания и сохранения направления движения. Может подключаться к очкам виртуальной реальности для управления «от первого лица».
Gladius 2017
В 2017 году появился очередной краудфандинговый проект подводного робота на площадке IndiGoGo.

4к видеокамера, 100 метров глубины, 500 радиус действия, цена 600-1700 долларов.
Конструктор для школьников
MUR — набор для соревнований JuniorSkills.

Разработка была представлена Сергеем Муном из Владивостока на выставке РобоМех-2015 в Хабаровске 12 ноября.
Сайт проекта — murproject.com
На базе этого конструктора проводится олимпиада НТИ для старшеклассников со всей России по профилю «Водные робототехнические системы».
На отборочных этапах надо решеть задачки по физике и информатике, а так же освоить управление подводными роботами на 3д-симуляторе.
В заключительном этапе задачки поинтереснее:
- сборка двух подводных роботов из конструктора (предлагается конструктор MUR);
- оба робота должны пройти дистанцию, ориентируясь по подводным объектам. Но только один робот оснащен камерами, второй должен получать сигнал от первого робота;
- разработка собственного устройства связи между роботами, используя предложенные компоненты и имея доступ к протоколам и электрическим схемам конструктора;
- организация связи между роботами.
Еще в 2017 прошла в Иннополисе прошла олимпиада «Водные Интеллектуальные Робототехнические Системы». (Правила тут.)
Россия, Владивосток
Мне было очень приятно узнать, что команда разработчиков подводных беспилотников из моего города и моего универа (Дальневосточный федеральный университет — ДВФУ) настолько крутая.

С 2012 года совместная команда робототехников ДВФУ и ДВО РАН ежегодно становится призером в классе автономных роботов на всемирных турнирах RoboSub и азиатских чемпионатах Singapore AUV Challenge.
А вот и «Джуниор», робот, с которым владивостокская команда

RoboSub
2012 — 5 место (ДВФУ, Владивосток)
2013 — 3 место (ДВФУ, Владивосток)
2014 — 4 место (ДВФУ, Владивосток)
2015 — 3 и 6 место (Морской университет им. Невельского и ДВФУ, Владивосток)
2016 — 4 место (Морской университет им. Невельского, Владивосток)
2017 — 2 место (ДВФУ, Владивосток)
Singapore AUV challenge
2013 — 1 место (ДВФУ, Владивосток)
2015 — 2 место (ДВФУ, Владивосток)
2016 — 2 место (ДВФУ, Владивосток)
2017 — 1 место (ДВФУ, Владивосток)
Про владивостокскую команду(интервью с разработчиками, ТТХ робота и пр.) и про правила международных соревнований напишу в следующем выпуске.
Источники
- Авиакатастрофа над Паломаресом, Wikipedia
- Паломарес. Водородные бомбы на пляже, TopWar
- Полное погружение: как использование роботов в поисках «Титаника» изменило подход к подводным исследованиям, T&P
- Необычные способы поднять «Титаник»: версии ученых, РИА Новости
- Роберт Боллард исследует океаны, TED
- Путь Джеймса Кэмерона, Wired, Geektimes
- Джеймс Кэмерон: До «Аватара»… любознательный мальчик, TED
- RoboSub
- Робосезон 2013: из-под воды в небо, Geektimes
- OpenRov, Wikipedia
- OpenROV — подводный робот (open source), Habrahabr
- David Lang: Мой подводный робот, TED
- Подводный дрон OpenROV Trident, Geektimes
- Конструктор для школьников Micro Underwater Robot Edu
- Олимпиада НТИ: Водные робототехнические системы
Комментарии (22)
Wizard_of_light
10.10.2017 13:01+8Фильм «Титаник» стоил больше, чем сам корабль
Чёрт побери, всё-таки с нашим миром что-то не так.
DMGarikk
10.10.2017 16:46-3я думаю если пересчитать стоимость корабля в 1912 году на современные цены то явно не получится 7,5 млн долларов
Wizard_of_light
10.10.2017 18:04Так это уже и посчитано с учётом инфляции. Фильм обошёлся в 1,25 раза дороже корабля. С учётом современных кораблестроительных технологий Кэмерон на эти деньги мог бы пару раз построить и утопить «Титаник» вживую, причём с оплатой страховки пассажиров
и буксировки айсбергов.

pulsatrix
11.10.2017 13:42+1Да все нормально с миром. На крушение Титаника вживую посмотрело около 2000 человек, а в кино — несколько миллионов. Вот и разница в цене.

DEM_dwg
10.10.2017 15:26+1Странно, но пока не видел ни одного дистанционно-управляемого подводного аппарата с гарпуном…
Интересно сколько можно будет таким аппаратом рыбы «наловить».
Serge78rus
10.10.2017 15:59+1Уж точно не больше, чем промысловым тралом.
DEM_dwg
10.10.2017 16:15+1Я про хоббийную охоту, а не в промышленных масштабах.
Думаю было бы не мало желающих с помощью джойтстика управлять и стрелять гарпуном.
А не с помощьюспинераспиннинга.Serge78rus
10.10.2017 17:04Думается, что в качестве хобби, большинство все-таки предпочло бы спиннинг или подводное ружье, а не бессмысленное «роботизированное» убийство рыбы.


OriSvet
10.10.2017 19:26>Операция была профинансирована ВМС США для секретной разведки двух затонувших в 1960-е годы атомных подводных лодок USS Scorpion и USS Thresher
Што? Вы б хоть посмотрели, где кто затонул. Там пол-Атлантики придётся пропахать, чтобы все три точки посетить, не говоря уже о том, что у ВМС США собственные батискафы есть, тот же «Триест», который на месте крушения «Трешера» еще тогда работал и который, к слову, так и не смог найти корпус лодки.

hoegni
10.10.2017 19:33Спасибо за статью!
Но все-таки не надо называть "Алвина" и "Миры" батискафами. Батискаф — это аппарат с поплавком, заполненным бензином, ну или иной жидкостью легче воды. Этакий подводный дирижабль. А Альвины и Миры — обитаемые глубоководные аппараты по типу подводных лодок.

nutshell912
11.10.2017 09:46+2Для точности хочу указать, что в 2015 году в RoboSub третье место заняла команда Морского университета им. Невельского, вместо этого указана команда ДВФУ с шестым местом. Про нас всё время забывают :)

MagisterLudi Автор
11.10.2017 09:51Про нас всё время забывают
Ну так давайте напишу про вашу команду.
impetus
Всё-таки торпеды — самые первые и массовые подводные беспилотники. Некорректно их «забыть»
И на конец 2МВ они были уже достаточно сложны (типовое поведение НЕсамонаводящейся торпеды — едем строго прямо по гироскопу Nсекунд, после чего сваливаемся в правую или левую (как настроено при пуске) циркуляцию, а через M секунд самовзрываеся. (Соотв взрыватель — ударно-нажимной, оптический.магнитный — как взвёлся через n секунд так до упора и работает)
impetus
Кстати, мины — тоже подводные беспилотники. А они бывают весьма хитрыми.
Просто сейчас намечается большой пересмотр «морского права» — в основном на тему как раз беспилотников — и там военным беспилотникам (будет) уделено много внимания. Я просто напомнить, что слово «беспилотник» означает на самом деле очень многое — например, умный буй, который сам то всплывает то погружается — тоже. (Ну и масса вопросов типа права собсвенности или отвественности перед третьими лицами за события свзязанные с ними. )
Указанные в статье беспилотники — далеко не все ниши, хотя статья хорошая, но может сложиться впечатление что беспилотник — это вот примерно то, что в статье, а оно — гораздо, гораздо шире (надводных — напр. парусных, по которым тоже соревнования проходят, в т.ч. многодневные, уж не будем касаться).
igruh
Секунд на десять залип, пытаясь понять, на какой конец сложны два мегабайта, пока не понял, что это про войну. Всё-таки не стоит использовать нестандартные сокращения.