
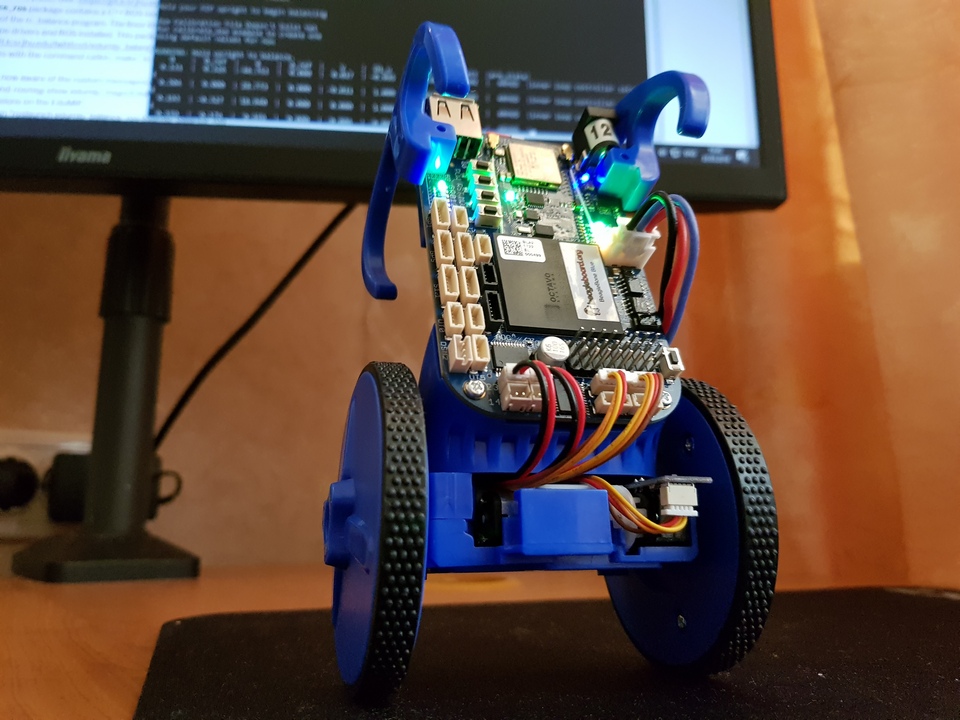
Робот может держать баланс на двух колесах, довольно шустро ездить. На борту полноценный linux, есть wifi. Программировать можно через web интерфейс. Есть инструкции и исходники по запуску на нем ROS. В общем море возможностей для творчества.
Давно хотел поиграться с роботом с гироскопом, акселерометром, компасом да по изучать ROS. Не хотелось как раньше ничего паять и мастерить. И вот у BeagleBone появился одно платный компьютер со встроенной платой расширения для роботов BeagleBone Blue, в котором есть необходимые датчики и драйверы двигателей. Через некоторое время под него доработали комплект для сборки робота EduMip в штатах и написали инструкцию по запуску на нем ROS с исходниками. Вообщем я загорелся.
Что входит в комплект:
- колесная база с моторами / редукторами / колесами / энкодерами / проводами
- 2-элементный 1400 мАч LiPo
- зарядное устройство 12 вольт
- BeagleBone Blue
EduMIP был создан в лаборатории робототехники UC SAN DIEGO COORDINATED ROBOTICS LAB. Используется в онлайн-курсах, университетах и кружках робототехники.
EduMIP является платформой для обучения:
- Динамическое моделирование и управление обратной связью неустойчивых систем.
- Планирование движения робота и предотвращение столкновений.
- Управление мотора DC через H-мосты и энкодеры.
- Оценка ориентации через IMU и Барометр.
- Сообщение через WiFi (802.11 b / g/n) и Bluetooth (4.1 / BLE).
- Зарядка, балансировка, предохранение, и контроль (включенного) LiPo 2 секционного аккумулятора.
- Многопоточное, событийно-ориентированное программирование на C в Debian Linux.
EduMIP совместим с Python, ROS, MATLAB & Simulink, and LabVIEW.
Шасси EduMip было разработано в сотрудничестве с WowWee.
EduMIP легко расширить с помощью 3D печати, есть обширная библиотека программного обеспечения, для миллионов стандартных датчиков и устройств связи по: USB, I2C, SPI, CAN, UART (GPS, DSM2), PWM (servos, ESCs), GPIO, ADC.
Все таки пришлось купить еще паяльник чтобы припаять провода к моторам, за эти деньги могли бы и сразу припаять. В остальном комплект вполне качественный и хорошо упакован.
Собрал за один вечер. Моторы и колеса на мой взгляд хлюпкие. Радует что не нужно было практически паять, вся электроника на одной плате. Аккумулятор заряжается через плату, из скрипта видно напряжение аккумулятора.
Несомненным плюсом для меня является что в BedgleBone встроен wifi и полноценный linux. Сразу стоит Cloud9 IDE и можно по воздуху программировать робота на python и других языках программирования. В плату встроены 4гигабайта памяти на которые уже записан Linux Debian, так что запустить и программировать можно без флэшки. Только для ROS надо записывать образ на карту памяти.
В следующей части буду разбирать как его программировать, пока застрял на том как инсталлировать дополнительные библиотеки от этого робота в Debian.
Комментарии (8)

lasc
24.05.2018 06:39Интересно, если моторчик от моноколеса взять, можно ли этим заменить плату управления.
AmigoRRR Автор
24.05.2018 14:18драйверы двигателей не вытянут точно, там на 1,2А на колесо стоят. моноколеса сигвеи думал, но там не понятно как родными драйверами управлять и на какие их заменить.
xDimus
24.05.2018 10:54Давно хотел поиграться с роботом с гироскопом, акселерометром, компасом да по изучать ROS. Не хотелось как раньше ничего паять и мастерить.
А что то подобное, но с паянием и подешевле не попадалось?AmigoRRR Автор
24.05.2018 14:23полно но в основном на arduino и smt32. на raspberry pi + arduino приближается по цене, но нет такого проекта с исходниками и инструкциями для ros.
bugdesigner
В обзоре не хватает главного — видео "первого полёта". Не понятно, работает или нет?
AmigoRRR Автор
Работает, первый запуск будет в следующей части. Пока не могу разобраться с программой на pythone, упорно не балансируется. На С нормально, но там не понятно как им управлять.