
Мой первый дрон в детстве был таким

Их у меня было три. Первый не взлетел, потому что я открыл коробку ещё в автобусе по дороге домой и потерял гаечку, которая держит верхнюю треугольную жёлтую плашку, удерживающую лопасти. У второго протёрся пусковой механизм капроновой нитью и лопнула резинка внутри, которая скручивала эту нить обратно. Третий прожил дольше всех, но его унесло ветром.
Дальше был этот вертолётик, с которым я игрался дома, потом был такой же, но с камерой, за ним пошли дроны Syma x5 и x8 pro, в пультах которых я перепаивал их убогие антенны на нормальные из wi-fi роутеров и это работало шикарно. Потом был Walkera QR X350 Pro с отдельным подвесом для камеры и китайским аналогом GoPro и вот наконец я взял Mavic 1 Pro на день в аренду и понял, что всё это время я занимался не тем. Я, конечно, его потом купил и год с удовольствием летал, но анонс Mavic 2 Pro лишил меня покоя, а мой бюджет — двух с лишним тысяч австралийских долларов.
{kind=link}
{kind=link}


Проблемы и особенности, о которых не сказано в спецификациях или в рекламе
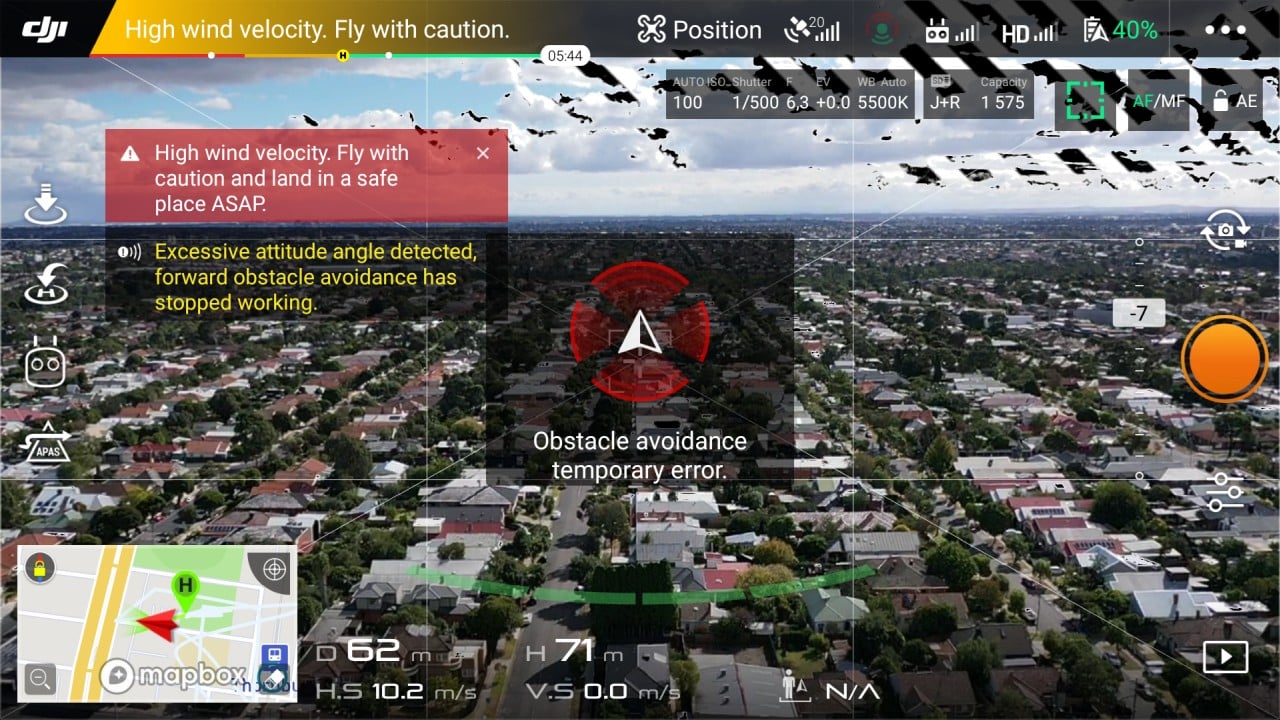
Mavic 2 в обычном режиме летает быстрей, чем первый. Настолько быстрей, что к этому пришлось отдельно привыкать и если давить полный газ вперед с небольшим встречным ветром — угол наклона корпуса вперёд делает передние датчики препятствий бесполезными, о чём нам сообщает приложение на телефоне.
Пропеллеры в комплекте сразу идут с пониженным содержанием
В целом суть такова — эти пропеллеры имеют более оптимальную аэродинамическую форму и создают большую подъёмную силу, чем стоковые при равных оборотах. Как следствие — для того, чтобы просто висеть нужно крутить их медленней, по моим субъективным замерам в духе «плюс/минус километр» — на 20%.
Проверялось следующим образом — на пульте есть тахометр, но я только сейчас задумался — обороты какого из четырёх моторов он показывает. Я думаю, что усреднённое значение со всех четырёх. Так вот — со стоковыми пропеллерами там 530 об/мин ± 50 в зависимости от ветра. А вот с пафосными пропеллерами — 420 об/мин ± 50. Как следствие более низких оборотов — звук не то, чтобы тише, он просто ниже по тональности, что в том числе воспринимается и как меньшая громкость.
Послушать и сравнить можно здесь:
На мой субъективный взгляд снижение оборотов двигателей в целом даёт пару дополнительных минут полёта, поскольку энергии расходуется меньше. Но специально я это не тестировал.
Сами пропеллеры — слева Mavic 1, справа — Mavic 2 / platinum.

У пульта стики теперь откручиваются, что с одной стороны уменьшает возможность повредить пульт при переноске, с другой — их можно уронить и потерять. Снизу есть дополнительный разъём USB, (как и у первого Мавика) куда можно подключить планшет или телефон или ещё что-нибудь, но этот порт работает только если вытащить боковой кабель, даже если он никуда не подключён. Это в своё время заставило меня думать, что у меня пульт бракованный и помогла только случайность, когда я после зарядки пульта опять подключил к нему планшет без бокового провода и всё заработало.

Датчики препятствий
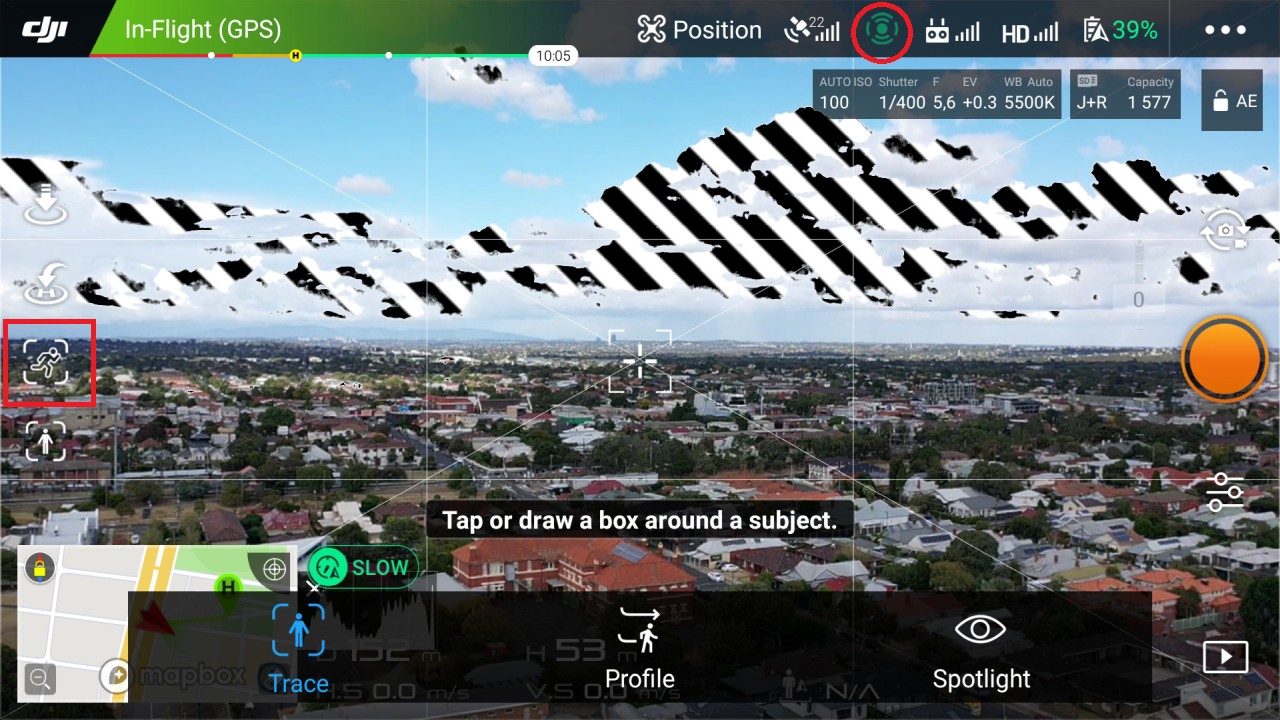
В рекламе идёт упор на то, что дрон со всех сторон увешан сенсорами и ни за что никуда не врежется. По факту все датчики работают только в двух режимах — Active Track и Tripod. В обычном режиме не работают боковые сенсоры, а в спортивном — вообще ни один. Кроме того, в Active Track есть «медленный» и «быстрый» режимы, во втором так же выводится предупреждение, что датчики будут отключены.

Active Track (медленный) — все датчики работают.
Лично у меня в Active Track дрон жёстко тупит на боковых препятствиях, потому что по бокам у него только одна камера, которая определяет наличие препятствия, но не расстояние до него, поэтому пролетая в метре от дерева дрон просто останавливается и жалуется на препятствие сбоку, хотя оно вообще ему никак не мешает.
Отдельно стоит упомянуть режим Tripod (штатив).
Изначально у первого Мавика и до определённого обновления прошивки у второго, это был режим в котором дрон еле двигается, если пытаться им управлять, но при этом все силы тратит на то, чтобы оставаться неподвижным несмотря на ветер. Отличный режим для фотографий.
После обновления в этом режиме теперь можно задавать скорость передвижения по горизонтали, вертикали и поворотов, так что можно использовать его и для съёмки видео. Отдельным бонусом идёт работа всех датчиков.

Камера
То, ради чего всё затевалось.
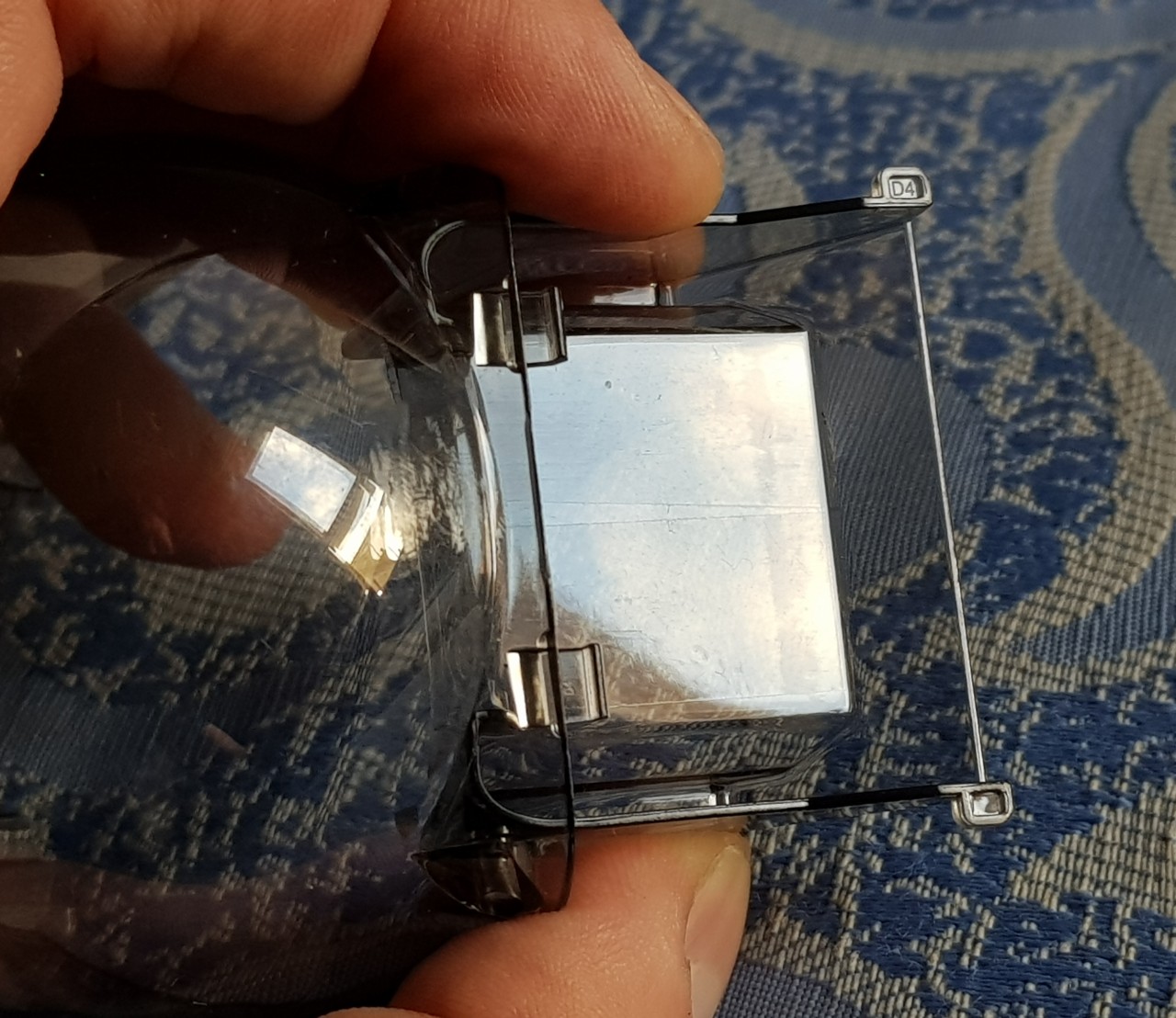
Первая проблема с камерой — это пластиковая крышка. Она царапает камеру сверху каждый раз, когда я надеваю и снимаю эту крышку.

Решение состоит в том, чтобы наклеить скотч на поверхность, трущуюся о камеру. Если приглядеться — видно две немного расходящиеся полоски. К сожалению, узнал я об этом слишком поздно и товарный вид уже подпорчен.
Вторая проблема — непонятные изменения в настройках видео при смене полётных режимов.
В обычном режиме есть варианты видео — 2.7K 60fps и 1080p 120fps.


Но стоит переключиться в режим Active Track и эти варианты куда-то пропадают.


Так что если у меня стояло видео 2.7К 60fps — при переходе в Active Track там будет 2.7К 30 fps. Причём частота кадров меняется самопроизвольно и без каких-то уведомлений. При возврате из Active track в обычный режим она не меняется обратно и остаётся той же — 30 fps. Понятия не имею почему так происходит и каким образом режим полёта дрона вообще может влиять на настройки камеры, но это меня очень расстроило и запороло пару важных роликов. Теперь я знаю, что каждый раз при переключении режимов надо проверять настройки видео.
В режиме Hyperlapse (типа TimeLapse) есть только один формат видео — 1080p 25 fps H264 и он там прибит гвоздями намертво. То есть вообще нельзя ничего изменить, кнопки для настройки видео просто нет.

Решение — поставить галочку «сохранять исходные фотографии» и потом из них можно хоть 4К 120fps сделать, но руками.

Сама по себе камера, Hasselblad с однодюймовым сенсором, должна была быть бомбой, которая унижает владельцев Phantom 4 Pro, но на Youtube появилось видео от пользователя Cliff Totten с форума Mavicpilots, где он обращает внимание на странную проблему с камерой.
Если не хочется смотреть 35 минут — краткая выжимка:
В ролике поднимается проблема мутного видео в режиме 4К, которое, по мнению Клиффа, выглядит, как растянутое видео 2.7К. Клифф выдвигает гипотезу о том, что DJI столкнулись с проблемой перегрева сенсора и не смогли обеспечить достаточное охлаждение ему в таком маленьком корпусе. Это, по его мнению, явилось причиной отсрочки презентации The bigger Picture, и так как проблема проявилась почти перед релизом — DJI пошли на хитрость и программно сделали два режима 4К — обычный и HQ. Первый снимает видео 2.7К и растягивает его до 4К, из-за чего проявляется мыло, второй — настоящий 4К, но использует только часть пикселей в середине сенсора, что выглядит, как кропнутое видео с меньшим углом обзора.
Официальный ответ DJI на это видео(англ). TL;DR — у нас всё хорошо, вы неправильно тестируете.
Я прогнал те же тесты с фотомишенью и не обнаружил этой проблемы у себя (видео по запросу). Возможно, потому что у меня дрон из второй партии, а первая — с проблемой, разлетелась, как горячие пирожки и в Мельбурне через неделю после выхода нельзя было купить Mavic 2 Pro вообще нигде — всё было распродано.
Тем не менее, я всё равно не снимаю в 4К, потому что мне не на чем смотреть такое видео и мне больше нравится 60 кадров в секунду, так что 2.7К для меня вполне достаточно.
Ночной режим. Это просто нечто.











Вывод
В целом я очень доволен и на мой взгляд достоинства Mavic 2 Pro существенно превосходят его недостатки. Но я думаю, что об этих недостатках хорошо знать перед покупкой, а не после.
Надеюсь кому-нибудь мой опыт будет полезен.
Комментарии (28)

Azat2015
30.03.2019 14:49+1Снизу есть дополнительный разъём USB, (как и у первого Мавика) куда можно подключить планшет или телефон или ещё что-нибудь, но этот порт работает только если вытащить боковой кабель, даже если он никуда не подключён.
Возможно, все же бракованный, т.к. у меня с подключенным боковым кабелем на зарядку и нижним на планшет все отлично работает, как и на первом мавике.
Первая проблема с камерой — это пластиковая крышка. Она царапает камеру сверху каждый раз, когда я надеваю и снимаю эту крышку.
Посмотрел сейчас на своем, если хорошо приглядеться только можно увидеть потертости. Кстати, не в первый раз читаю, что царапает, но у меня такого нет.Oz_Alex Автор
30.03.2019 14:52Не знаю, у меня этот порт не работал ни у первого ни у второго пульта.
В принципе — не проблема выдернуть кабель сбоку, но если не знать — можно долго думать.
Azat2015
30.03.2019 15:15Добавлю от себя немного.
-Неприятный момент с пропеллерами. Из-за загнутости концов пропеллеров в направлении от квадрика (наверх) и из-за маленькой их толщины в этих местах, кончики со временем отламываются при засовывании квадрика в сумку из комбо кита.
-Новые пропеллеры режут пальцы более агрессивно.)
-Я не нашел в продаже (хотя давно уже не искал) зарядное устройство для аккумов. Т.е. Если вам мало одной зарядки, то второй хаб купить можно, а вот сам блок питания — нет. UPD нашел, уже есть в продаже.
+Увеличение скорости по сравнению с первым мавиком таково, что полностью исключило моменты, когда неподвижно висящий квадрик вдруг начинало уносить ветром со скоростью 5-6 м/с. Т.е. если с первым мавиком я частенько (10-20%) вынужден был прекращать съемку, то со вторым мавиком за 4 месяца использования такого еще не было ни разу.
В целом же — офигенная машинка. По сравнению с первым — большой шаг вперед.Oz_Alex Автор
30.03.2019 15:36Т.е. если с первым мавиком я частенько (10-20%) вынужден был прекращать съемку, то со вторым мавиком за 4 месяца использования такого еще не было ни разу.
Со вторым Мавиком я вообще игнорирую сообщения о ветре потому что ему пофиг и только когда там фигурирует «ASAP» — я обращаю внимание на это с мыслью «ну что там...».
Один раз действительно пришлось садиться по причине того, что я жал полный газ вперёд, но своими глазами видел, как мой дрон летит назад и мне это не понравилось…

Chosen_One
30.03.2019 18:31Очень хочу такой дрон, но до этого в управлении дронами замечен не был. Что взять для обучения чтобы близко по ощущениям и не больно по карману?
Oz_Alex Автор
31.03.2019 03:30Для понимания самого процесса управления дроном вполне подойдёт что-нибудь вроде этого.
Его даже дома можно запускать и он почти неубиваемый. Но у него нет никакой интеллектуальной начинки и всё управление только в руках оператора.
kAIST
31.03.2019 07:47По опыту владения простенькими дронами и дронами от DJI, это совершенно разный процесс управления. Хотя бы дрон с GPS нужен.
Azat2015
31.03.2019 09:31После покупки Syma и пары полетов на нем, я забросил квадрокоптеры года на два.)
Поддержу тех, кто говорит, что учиться лучше на том, на чем потом будешь летать. Но учиться надо аккуратно, не дешевая игрушка.
bbs12
31.03.2019 09:27Этим дроном не нужно учиться управлять. Покупаете, выходите в поле, ждете пока поймает GPS, нажимаете газ, дрон взлетает и висит на автомате. Это самый простой в управлении дрон из всех, проще не бывает.

dimaviolinist
31.03.2019 19:17После Симы x5, которую вам посоветовали, у меня Hubsan 501m и Фантом 3.
Точно могу сказать, что лично мне после симы управлять следующими стало детской забавой. В любой ситуации знаешь, в какую сторону повёрнут квад, как компенсировать ветер (автоматика не идеальна).
Хабсан этот покупать категорически нельзя. Глючный и камера ужасная. Но дёшево :)
Я бы рекомендовал для начала самый простой квад с барометром (не нужно следить за высотой, само висит). Стоить будет 40-60 уе. Плюс сразу на парочку дополнительных аккумуляторов 10-15. Плюс на пропеллеры ещё 5-10. И готовьтесь к тому, что если понравится, это дорогое хобби.
Leutenant
31.03.2019 03:16Задумывался о мавиках, так как дроны в принципе приглянулись давно уже, в том числе и после небольшого тест драйва. Но каждый раз меня останавливает юридическая часть. В идеале хотелось бы брать его в поездках.
Есть ли у кого уже опыт именно в туристической части, так как в родной стране более менее все ясно, а вот чужие ограничения как-то останавливают сильно?
nochkin
31.03.2019 07:34Есть несколько приложений на телефон, которые показывают текущее положение дел в данном регионе предположительных полётов.
Часто бывает, что полёты временно запрещены из-за каких-то воздушных и не очень действий.
BackDoorMan
31.03.2019 16:44Это обширная тема. Надо внимательно знакомиться с ограничениями в конкретной стране. За зиму объехал 5 азиатских стран с Mavic Air. Если вкратце, то спокойнее всего в Китае. А вот во Вьетнам въезд с дронами в принципе запрещен.
kSx
31.03.2019 19:00Не нужно прилетать с дроном в Нячанг, там военный аэропорт и они попросят оставить его у них на время отпуска (ну или зелёную бумажку). А в остальном тоже вроде спокойно.
BackDoorMan
01.04.2019 13:17Ну если бы только Нячанг. Прилёт в любой грозит отбором дрона на время пребывания в стране и ограничивает выезд этим же самым аэропортом, если вы, конечно, его хотите получить обратно. С сухопутной границей пока все спокойно, что, понятное дело, не делает полеты законными.

Gamliel_Fishkin
31.03.2019 22:04Но каждый раз меня останавливает юридическая часть.
Да, могут обвинить в покупке шпионского оборудования.
ofmetal
01.04.2019 07:28В Италию с квадриком — ни ногой: www.facebook.com/voytsekhovskiy/posts/967183433320957
В каждой стране свои законы, нужно изучить перед поездкой.
Например, в Сингапуре — летать можно подальше от людей и не выше 65м.
Правда, в рекламных роликах DJI они летают там на 200м.
ivansmith
31.03.2019 19:14Oz_Alex
А вы в очках летаете (FPV)? Если да, то хватает ли разрешения и вообще комфортно ли?
Хочу взять набором, квадр, очки, аккумы. Пока не определился ни с квадром, ни с производителем :((Oz_Alex Автор
01.04.2019 00:13Нет, с телефоном или планшетом. Я купил как-то очки dji goggles с целью рулить камерой поворотами головы и это было ужасно. Задержка реакции камеры составляет где-то 150-200 миллисекунд и вызывает тошноту буквально через минуту. К тому же они тяжёлые и полностью лишают возможности следить за дроном и вообще окружающей обстановкой.
Разрешение было вполне приемлемым, но в целом мне не понравилось.
Единственная попытка полетать с очками закончилась вот так:
ofmetal
01.04.2019 08:20Есть в м2про такой режим — hyperlapse: задаёшь маршрут в пространстве (точки и направления), он ему следует на скорости ~0.9м/с, делая фото в RAW (~41Мб) раз в 2 секунды.
У меня была идея — пролететь один маршрут зимой и летом, и сделать плавное градиентное перетекание зимы в лето. Для этого нужно ролики точно совместить (они в теории могут немножко разниться, чуть разные точки съёмки, чуть быстрее-медленнее где-то, чуть другое направление камеры), это в теории несложно подправить в адоб-премьер.
Вот такие подводные свиньи выяснились:
1. Нелепое управление гиперлапсами. Задал точки, запустил полёт. Ой, забыл сохранить маршрут. Всё, после приземления он будет недоступен.
Ок, в следующий раз задали маршрут и сохранили его перед полётом. Всё равно после приземления он будет недоступен. И все предыдущие маршруты. Их список нельзя увидеть, их нельзя переименовать и навести порядок. Недоступен, когда запущена DJI GO4; недоступен, когда к ней подключен пульт; недоступен, когда к пульту подключен квадрик; недоступен, когда всё включено и квадрик в полёте. Список становится доступен, если всё включено, всё летает и включен (доступный только в полёте) режим hyperlapse по точкам. Чтобы переименовать файлик, нужно запустить квадр! лавров.жпг
2. Пролетел я один маршрут дважды (второй раз был сильный ветер, может с этим связано). Направления камеры разнятся вплоть до 30-40 градусов — сдвиг больше полукадра! Это невозможно совместить при постобработке двигая картинки друг относительно друга. В рекламном ролике они демонстрировали сингапурский гиперлапс вида день-ночь тем не менее.
3. Решил задавать маршруты в полезной фирменной прожке DJI GS Pro (gs = ground station). В ней можно заранее накидать/отредактировать маршрут (без ограничения в 1м/с) на планшете, а потом при случае пролететь его. После запуска выяснилось, что кадры делаются аж раз в 5 секунд! А значит, за полёт их будет совсем немного, а видео будет слишком быстрым. В моём случае всего 66 кадров (2 секунды видео):
youtu.be/ztdqLOHqI3c
Кроме того, выяснилось, что RAW'ки на выходе gs pro имеют чуть меньшее разрешение, -100пикселей по ширине и -немного по высоте.
В остальном — отличный аппарат. Местами слишком умный, от чего возникают и другие нелепые проблемы, когда насильно всё решают за тебя.
ofmetal
01.04.2019 09:03> В режиме Hyperlapse (типа TimeLapse) есть только один формат видео — 1080p 25 fps H264 и он там прибит гвоздями намертво. То есть вообще нельзя ничего изменить, кнопки для настройки видео просто нет.
Ограничение fps тут как раз непринципиальное: по сути одни и те же кадры могут быть проиграны с разной скоростью.
А так — это видео довольно бесполезное, и если есть возможность его отключить (?), то это будет даже лучше. Т.к. по окончании съёмки он зазря кряхтит несколько десятков секунд, синтезируя видео. А ещё полученное видео: сильно обрезано, сильно уменьшено (в 10раз!), плохо стабилизировано, стрёмный цвет.
Результат будет радикально лучше, если снимать в RAW, а потом:
1. Случайную равку крутим в lightroom, чтобы поцветастее-поконтрастнее.
2. Копируем одни настройки конвертации на все остальные равки.
3. Выборочно проверяем несколько равок из разных мест, нормально ли на них отразились настройки.
4. Запускаем конвертацию, ждём 15мин.
5. Импортируем жипеги в Adobe Premiere.
6. Стабилизируем исходное 20Мп-видео при помощи Warp Stabilizer и делаем ему Nest Sequence.
7. Создаём видео нужного разрешения и кидаем на него эту последовательность. Можно увеличить интересующую область или управлять окошком динамически. Что круто.
8. Экспортируем.sashas
01.04.2019 17:41LRTimelapse
ofmetal
01.04.2019 18:06Спасибо, эта штука, судя по описанию, позволяет решить проблему в пункте (3) не унификацией настроек, а позволяет их плавно менять от кадра к кадру, задавая ключевые кадры.
Плюс заявлено, что может забороть эффект мерцания. «Match Total Exposures» даже в последнем LR не справляется с задачей.
cstrike
01.04.2019 11:21А как увеличить время показа этих сообщений на экране кто-нибудь знает? А то телефон пикает, опускаю глаза что бы прочесть, что там не так и вижу, как растворяется желтое окошко.
Azat2015
Не дает, я тестировал.) Один и тот же квадрик, на одном и том же полностью заряженном аккуме, висел на одном и том же расстоянии от земли. И главное, квадрики сели секунда в секунду.)
Энергии расходуется ровно столько же, оборотов меньше, но усилие (или как это по-научному?) большее.
По громкости да, более низкочастотный звук, но и громкость ниже (субъективно).
Oz_Alex Автор
Я думал это этом, но не хотел тестировать, потому что лень. Нужно несколько заходов для каждого типа пропеллеров, плюс ветер плюс время…
Интуитивно кажется, что раз меньше оборотов — то расходуется меньше энергии. Но объективно — скорее всего усилие на проворот больше поскольку тяга больше, а это требует больше энергии и в итоге то на то и выходит. Но пропеллеры позиционируются, именно как менее шумные, что при меньшем количестве оборотов вроде как частично правда (см видео в статье).