
Что было не так
Что было не так c предыдущим принтером:
- Шум — заглушал телевизор
- Размеры — 40x30x80 на стол не поставить (не влез даже на балкон, точнее влез но катушка с пластиком уже не влазила)
- Вес — 8кг (частично из за Nema23 и тяжелых мебельных щитов)
Что мне хотелось
Шум — убрать шум на минимум (в идеале только звук шаговиков в 32 микрошаговом режиме). Один из самых громких источников шума в дельта механике это линейные направляющих и линейные подшипники, в природе лечится рельсовыми направляющими или нехитрой конструкцией с алюминиевым профилем и подшипников скольжения одетыми в оболочку (Kossel). Как по мне, в вертикальном состоянии линейные подшипники и линейные направляющие работают не в правильном режиме.
Размеры — хочется принтер который легко умещается на стол с творческим беспорядком. Далее — размер печатной области должен быть не меньше чем 10x10x10+.
Почему я решил пожертвовать размерами печатной области — а потому что за полгода почти каждодневной печати мне не разу не понадобилось напечатать что то больше, чем 10x10. Я принял решение что мне этой области хватит с головой и даже останется.
Также, на прогрев области 10x10 надо в 4 раза меньше мощности блока питания, а это позволяет использовать обычные внешние блоки питания — я влез всего в 60ватт (с подогреваемой платформой), у меня 8.5A 12v. Большим плюсом является внешний блок питания, который лежит под столом и не занимает место.
Вес — предыдущий параметр уже позволяет серьезно уменьшить вес, плюс укороченные Nema17 (меньший момент, но это не проблема). Cтруктурная сложность для небольших конструкций достигается легче и легкими материалами.
Механики которые я рассматривал
XY Gantry
Не подходила по размерам — шаговик + каретка по одной оси это минимум 10+ сантиметров пространства, структурная стабильность также вызывала сомнения. Линейные подшипники должны быть разнесены (на мой взгляд ~7-9 сантиметров не используемого пространства.
HBot and CoreXY
Размер чуть меньше чем в предыдущем варианте. Структурная стабильность тут тоже также вызывала сомнения, плюс добавляется сложность с созданием перекосо-устойчивости (для данной механики это очень важно) так и с равномерным натягом ремня.
Delta
Один у меня уже был, но даже в уменьшенном виде размеры меня бы не устроили — три Nema17 длиной 71мм (47+24) ориентированные под 60 градусов и 10x10см рабочая область явно превышали 20 сантиметров в диаметре.
Articulated arm
Это моя мечта — но явно есть технические сложности с geabox без люфтов — пробовал печатать многие типы и всеми остался недоволен — последняя надежда на Harmonic drive (именно такой тип используется в промышленном оборудовании)
Polar
Тоже интерсная механика, даже проделал небольшую работу(на самом деле не то чтобы чистая полярная, в интернете встречал название «биполярная»), но отложил на будущее. В основном из за того что была найдена механика которая показалась мне несколько более перспективней. Из минусов полярной — сложность масштабирования, дополнительные затраты на передачу сигналов на вращающуюся платформу, структурная сложность одной из «оси».
SCARA
Вот на этом и остановился, точнее на варианте который в интернете имеет название — 5 bar parallel robot (хотя в википедии он описан в SCARA).
Тут меня устроило все:
- Вес
- Размер
- Шум
- Масштабирование — изменил длину рычагов и размер платформы и вот мы имеем большую область печати
- Возможность использовать aliexpress-стандартные детали
- Структурная сложность выглядела достижимой
- И хотелось чего то футуристического
Разработка
Вооружившись OpenScad я начал разработку.
Вся разработка opensource и найти её можно на github.com/pavlog/sscara
Далее я опишу ключевые моменты данной механики и выскажу свои мысли почему было сделано именно так или почему так делать не надо.
Редуктор
Самое важное в любом принтере это точность печати. Расчетная длина рычагов у меня получалось 150см — а это давало на максимальном радиусе длину хорды в 4.712мм (без микро шага, для 1.8deg шаговика). При использовании микро шага 32 (DRV драйверы позволяют это сделать) получалось уже 0.147мм, что в принципе еще нельзя назвать достаточным для хоббийного принтера (я считаю что максимум это 0.1mm. Также внушало опасение, что потеря крутящего момента шаговика на таком микро шаге будет приводить к проблемам. Было решено что оси будут крутится не напрямую, а через редуктор.
Перепробовал очень большое количество всяких схем и типов — все не подошло — в основном из-за люфтов, либо шансов на появления люфтов из за износа. Как оказалось — чем проще, тем лучше. А самым простым вариантом оказалась ременная передача. Просто и без люфтов.
Выбрав передаточное отношение 1 к 5 (и 32 микро шаг) у меня получилось худшая точность позиционирования равная 0.029мм (чего более чем достаточно).

Рычаги
SCARA может иметь как два рычага так и 4. От схемы с двумя отказался сразу — вешать шаговик на вынос это неправильное решение (в таких решениях используются двигатели постоянно вращения с энкодерами, также жесткость явно не для пластика). А вот четырех рычаговая система выглядела достижимой и не очень сложной.
Как выглядело сначала

Хот енд

Экструдер пришлось переделать — вариант с пружинкой(на две фотографии выше) хоть и прикольно смотрится, но явно не работает (не хватает прижимной силы), использовал стандартную схему.

Собрав данную конструкцию и приступив к тестирования сразу стало понятно что Хот энд из PTFE (фторопласт) жить долго не может — рано или поздно его выдавливает из нагревательного блока, осложнялось это еще и тем, что 10мм отверстие, где соединялись рычаги не подходило к стандартным китайским экструдерам. Придумывая все более и более замысловатые экструдеры, я понял, что это путь в никуда. Решил решать задачу не силойб а умом, а именно — подходить должен любой экструдер, который можно купить, значит должна быть планка крепления экструдера любой формы. Добавил небольшое ответвление от одного из рычагов и повернув его на десяток градусов — проблема решилась, но пришлось еще немного модифицировать прошивку (прошивка в директории Software/Marlin).
Как получилось

Прикрутил аналог E3DV5 — и все заработало. В процессе калибровки выяснилось, что толщины рычага явно не хватало, они прогибались — был утолщен рычаг, а для силовых рычагов были сделаны двойные рычаги с возможностью регулировки натяжения.
Двойные рычаги

И настройка натяжения

Z Ocь
Самое грустная часть повествования. Тут я допустил все ошибки, которые можно было допустить. Основная — это использования одного линейного подшипника на каждую линейную направляющую. Правильно — по два на каждую. Ну и в общем, ось z немного болтается — но так как платформа связана с осями рычагов — то болтаются они как одно целое и болтание не дает проблем.
Ось Z это то, что надо переделывать полностью. В процессе эксплуатации вылез z wobbling. 4 линейных подшипника и система натяжения ремня должны помочь. Крепление должно быть модульное — сейчас, чтобы добавить или улучшить что то, надо разбирать пол верхней части.
Электроника
Ramps 1.4+DVR8825+HC05 уже зарекомендовавший себя тандем (вот только ардуиновский регулятор на 5в явно слабый — был заменен на lm7805).
LCD модуль — RepRapDiscount Smart Controller — грустно, но все репраповские модули очень большого размера и их втискивание — самое большая сложность дизайна (c учетом того, что все что есть можно было уместить в 1.5 раза меньшую площадь).
Блок питания — внешний с разъемом DC Jack — 12v 8.5A. Потребления больше 60 ватт зарегистрировать не получилось (это с нагреваемым столом).
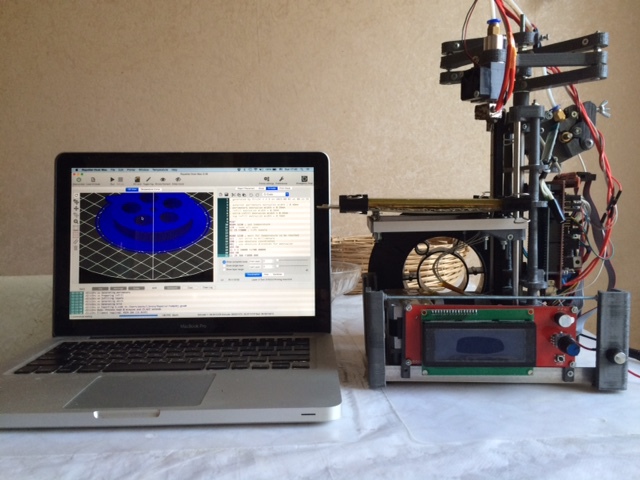
Подогреваемый стол — 12x12cm. На алюминиевую пластину, с помощью каптонового скотча, было приклеено 80cm 0.4 нихрома и накрыто 4мм стеклом. За 5 минут нагрева дают ~95 градусов (по показаниям термистора). Этих градусов и обезжиривания достаточно, чтобы печатать ABS (на видео была температура 60 и сахарный сироп, сейчас просто спиртом протираю перед печатью).
Рядом с 13" Macbook.
Прошивка и исходники
Все на GitHub. Модифицированный Marlin в директории Software/Marlin)
Что надо переделать/улучшить
- Ось Z
- Передаточное число (думаю 6-9 максимум)
- Ремень крепить прямо к большим шестерням, и вывернутым на изнанку
- Модульность
- Немного жесткости
- Уменьшить размер — но сохранить параметры рабочей области
- Уменьшить вес — чуть тоньше Nema17 (-1см)
Цена
51$ — 5 Nema17 (1 про запас останется)
32$ — Ramps 1.4+5 Dvr8825+LCD (1 drv8825 остается про запас)
7$ — E3DV5(китайский) под боуден, c метровой трубкой (пол метра останется про запас)
2$ — шестерня для экструдера
6$ — шестерни для gt2 ремня и gt2 ремень
5$ — 6мм направляющие (2x20см) и 12 линейных подшипников (а надо 4)
~8$ — подшипники качения+нихром+крепеж+алюминиевые уголки+мелочевка
10$ внешний блок питания 8.5A 12V
Итого: 120$ (с учетом блока питания, но без учета пластика для печати — ориентировочно ~200 грамм)
P.S. Не просите примеров печати — Z wobbling портит всю картинку (по XY все очень качественно) — когда закончу v2 сделаю обзорный тест качества (и возможно даже сравню с M3D). V1 — это Proof of Work.
P.S.2 До сих пор не получил свой M3D.
Комментарии (23)

Grox
04.08.2015 06:55А как насчёт вот такого варианта? Его можно рассматривать и вверх ногами, когда неподвижна головка, а двигается платформа.

А вот этот, для ваших целей слишком велик, но его сюда в коллекцию вариантов

rstepanov
04.08.2015 10:5395 градусов для стола это мало, большие детали из ABS на раз отлетают от стола на 120 градусах, нужно 125-130. Вот этот экструдер давит ABS 1.75 мм со скоростью 500 мм/мин (feed rate) через дырку 0.35 мм, и достаточно удобен для замены бобины, только печатать его нужно из PLA, прижим из ABS лопается. Ну, и что касается качества, на какой скорости печати «по XY все очень качественно»? Интересно посмотреть, что там будет с качеством, скажем, на 100 мм/с…

PavloG
04.08.2015 11:18Уже как 6 месяцев печатаю и при 110 градусах (старая дельта) не отлетали. Возможно каптон у меня добавляет силы — иногда приходится ждать, что бы немного остыло, иначе можно деформировать. Также помогает уменьшенный первый слой — когда он хорошо размазывается.
Далее по скорости — уверен что без гиаред екструдера 100мм/с будут проблемы. Я печатаю 70мм/с на заполнении, 50 на периметрах.rstepanov
04.08.2015 11:31Вот такая не отлетит?

Размеры где-то 10х15 см.PavloG
04.08.2015 11:35Не не попробую — 15 сантиметром дельта не возьмет, рычагов не хватит.
rstepanov
04.08.2015 11:42Ну так вот как раз фишка в том, что с маленькими деталями обычно все хорошо, а когда размер большой и много прямых линий — рвет… Логичнее было бы печатать из материала с меньшей усадкой, но конкретно эта деталь должна держать температуру и напечатать из PLA ее нельзя.
PavloG
04.08.2015 11:51Про деталь на картинке — а можно ссылку на thingverse?
rstepanov
04.08.2015 12:03Конечно, вот она.
PavloG
04.08.2015 12:30Позволю себе покритиковать данную деталь (и подогнать под ответ что 10x15 см детали никому не нужны)
На мой взгляд эта деталь нормально работать не будет — тут даже abs не поможет. Она будет прогибаться(прогибаться будут рычаги которые крепятся на эту деталь). Я обратил внимание, что все используют лист фанеры для этих целей.
Это, к стати, еще один миф 3Д печати, что все можно распечатать — распечатать можно, но зачем если есть простые аналоги за копейки.
Например — нет смысла печать лист 100x100x3мм, если на рынке можно купить фанеру и вырезать из неё.rstepanov
04.08.2015 13:37:) :) :)
На фанеру обратно не вернусь :) Мой стол без подшипников весит чуть больше 100 граммов и он не прогибается и не деформируется при нагреве.
yurash
Интересно. Не знал что столько разных типов механик применяется.
Только насчёт «футуристичности» я б поспорил — мне эта приспособа напомнила древнейший аппарат Пантограф en.wikipedia.org/wiki/Pantograph