
Самая свежая статья и самая подробная оказалась тут, на Хабре. Взяв от всех понемногу, решил соорудить нечто похожее.
Понравилась идея с регулируемой скоростью вращения. Но не устроила на мой взгляд тонковатая шпилька и размер устройства.
На всё ушло почти 6 мес. Спасибо Алиэкспрессу, совсем не «экспрессу».
Итак, я начал с того что нарисовал желаемое в SOLIDWORKS.

Нарисовал всё, от дощечек до гайки.
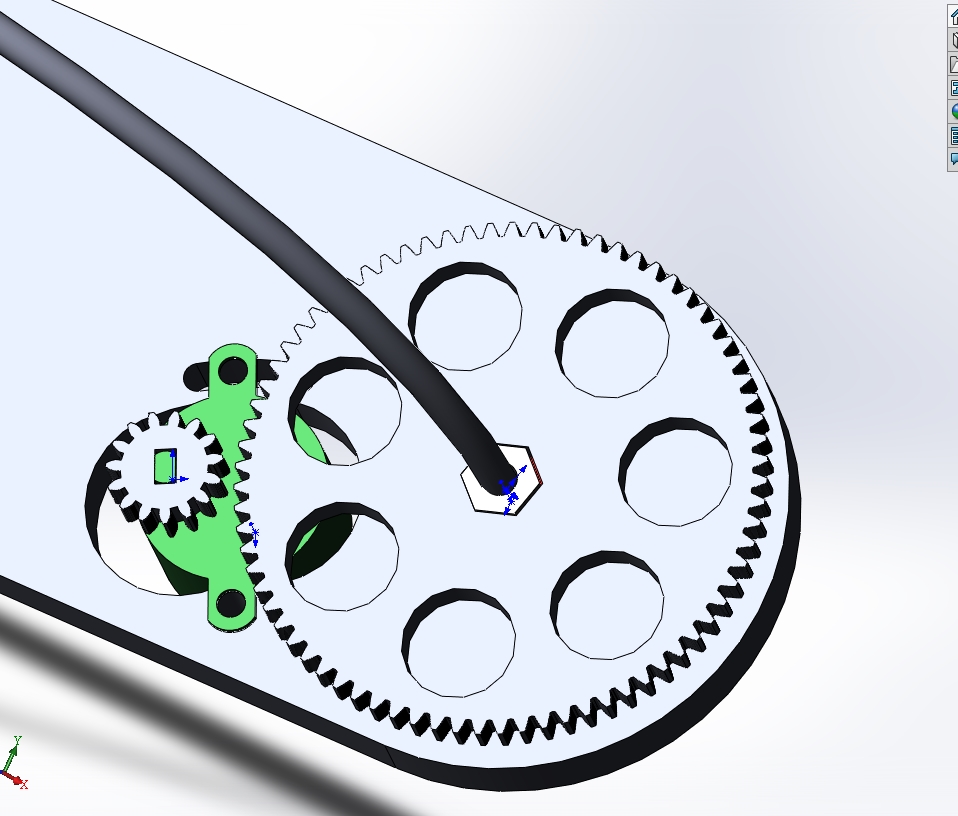
Так как моё нутро просит- «больше, выше, сильнее», то решил сделать передаточное число на шестернях 1:5.
Первый вариант шестерни: высота 6мм, гайка м5.

Начав предварительную сборку, выяснилось, что шестерня на двигателе стоит выше шестерни на шпильке. Что делать? Рисовать и печатать снова. Благо 3D принтер под боком.
Далее хуже.
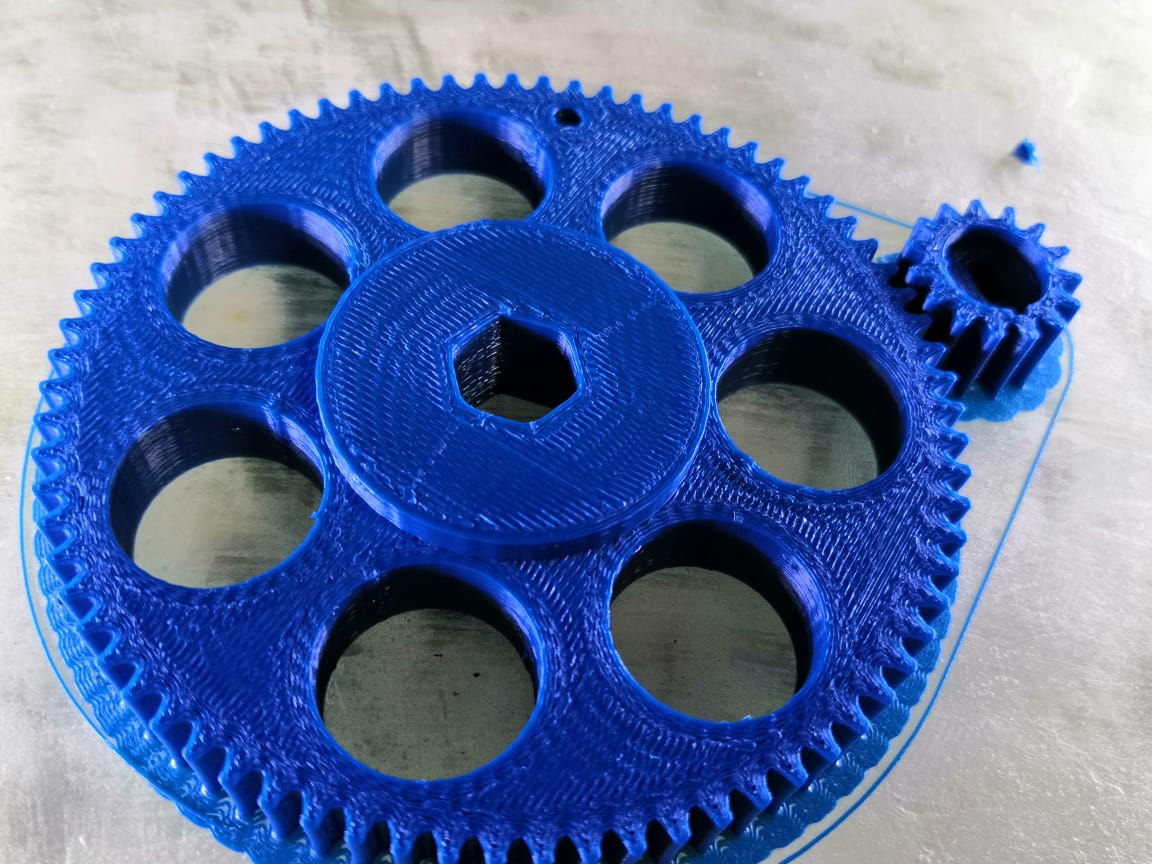
Добавил опорную часть для уменьшения трения и подъёма шестерни, плюс увеличил ее толщину до 12мм общая и 10мм — зубчатая.
«Моторную» шестерню сделал с высвобождением для глубокой посадки. И в каждой из шестерен сделал отметину в виде 2мм отверстия для контроля вращения.

Петля для «устройства» выбиралась с учетом ширины и минимального люфта. 100руб за 2шт.

Что бы уменьшить погрешность в открывании, переделал основание и ответную деталь. Сделал выборку под петлю. Жаль своего фрезера с ЧПУ нет. Приходится заказывать. Габариты 240х80мм.
Наши фрезеровщики изготавливают из фанеры 10 мм за 300 руб. вместе с фанерой.


Больше всего, вызывает сомнение шпилька на 6мм. Точность у неё, мягко говоря, не очень. Где-то гайка пролетает, а где-то ключ не мог провернуть.
На момент написания всё лежит в разобранном состоянии. Новое основание готово будет завтра.
Так как «основатель» астротрекера всё подробно написал, меньше всего вызвало затруднений програмирование. 20мин на всё. Правда с начало вспомнил математику за 5ый класс, астрономию за 9ый, физику и Excel. Всё это заняло целый день. Так как, ну ни как не хотел двигатель вращаться с нужной скоростью. Плюс немного изменил «скорость по умолчанию» на 297, так как размер шпильки и трекера другие. Но по факту сборки еще раз скорректирую. И изменил назначение 2х кнопок. Теперь они добавляют не по 10ед, а по 100. Я рассудил так, 1 звездную скорость я могу подстроить по 0,10ед., а вот сделать таймлапс, например, хочется быстрее. А так же, вернуть трекер в исходное состояние, меньшим нажатием кнопок. Но думаю практика потом поставит все на места.
Сборку после всех доработок обязуюсь осветить позднее, а так же выложить первые результаты.
Была идея сделать основание из Al с самодельной петлей, а в петлю установить лазерную указку, тем самым зафиксировать центр. Но эта мысль была изгнана, со словами — «Эту испытай, потом дальше пойдешь».
Всем чистого, звёздного неба.
Комментарии (65)

mmMike
09.12.2019 05:58Не советую этот шаговый двигатель. У него (у редуктора в нем) люфт почти 10 градусов.
Делал (сделал https://habr.com/ru/post/412479/) 3D сканер. Пробовал с этим двигателем. Отвратительная точность и повторяемость.
Достаточную точность и повторяемость дает нормальный шаговый двигатель. Редуктор (понижающий) — ременной.
У шестеренок, тем более самодельных, то же приличный люфт.azudem
09.12.2019 06:20Поскольку движение в одну сторону, то люфтами можно пренебречь.
mmMike
09.12.2019 08:28Пренебречь можно всем. Смотря что хотите получить. Я намучился с этим шаговиком.
И с попытками выставить начальный 0. И с тем что шаг у него неравномерный по факту.
Все это для задач 3D сканера где требовалось на расстоянии 2 метра иметь равномерные отметки луча лазера с шагом ~2 мм.
Мне в принципе, все равно. Я поделился своим практическим опытом.
Поскольку движение в одну сторону, то люфтами можно пренебречь.
Я то же так думал, когда собрал сканер на этих шаговиках. Потом выкинул и поставил нормальные.

almisnab Автор
09.12.2019 11:34Просто у вас в 3D сканере и печати у него задачи другие. В вашем случаее он должен быть точным и жестким. А этого у него нет. В моём случае одна задача — крутить ровно и равномерно на протяжении хотя бы 30мин. Согластно описанию эту функцию он должен выполнять на 5+. Но!!! он себя еле еле крутит. Или шаговик бракованный попался или он и правда такой.
mmMike
09.12.2019 11:50+1Но!!! он себя еле еле крутит. Или шаговик бракованный попался или он и правда такой.
Не бракованный.
Они действительно очень слабые. Особенно в режиме не полного шага.
Характеристикам, приведенным китайцами верить нельзя. Уже при нагрузке на валу 50 грамм на 3 см рычага (для наглядности из своих опытов) начинает пропускать шаги. Что существенно меньше заявленных. Существенно… раза в 3
12в от 5в сособо не отличаются по этому параметру.
Вашу конструкцию скорее всего не потянет даже без нагрузки (фотоаппарат).
У меня таких шаговиков много было… максимум — поворотная платформа с легкой камерой для видео наблюдения.
Берите
- нормальный шаговик типа Nema 17.
- плату управления типа A4988 (или аналоги)
- муфта. Обязательно. Иначе в Вашей конструкции будет подклинивать.
Не настолько уже это и дорого… Чем пытаться из г… на и палок что то соорудить. В конечном итоге дешевле выйдет.
И да… С нормальным шаговиком и платой в режиме 1/8 Вам похоже и шестеренки не нужны будут.
Полный шаг — 1.8градусов. режим 1/8 соответсвенно 1.8/8almisnab Автор
09.12.2019 12:26Есть NEMA17. Цель была 5в, и не слишком тяжелый.
mmMike
09.12.2019 12:43Чудес не бывает.
28BYJ48 — дохлые и для таких задач не тянут.
Но, подозреваю, что более дешевый аппаратно вариант: управление коллекторным движком + энкодер.
Вам с ходу не дастся (PID алгоритм. Обратная связь по току обязательно, аппаратный декодер).
Так что… я бы рекомендовал нормальный шаговик с запасом по моменту. А блок питания на 12-24в 500ма — это рублей 300 всего. Было бы что экономить…
Или вообще от старого ноута. 12в это минимально. Шаговик током управляется. Т.е. любой БП от 12в и до максимально напряжения платы контроллера (вольт 30 кажется у A4988)
trapwalker
09.12.2019 12:55Я так понимаю автор хочет автономности в поле и рассчитывает на 5V повербанки. Я уже писал, что современные павербанки с QC дают 12 вольт без проблем, но цена подходящих преобразователей получается примерно как ваши упомянутые БП. Ну и плюс сам павербанк.
mmMike
09.12.2019 13:08Типичный powerbank больше 2A не выдает (а китайские часто 1А с трудом).
Ток для шаговика формата Nema 17 должен быть не менее 300 мА на 12В. Иначе совсем дохло будет.
5В 2А ->80% КПД->12В * 0.6А
В принципе да… должно работать.
Но, если автор хочет автоном, то без снятия тока удержания никакой "батарейки" на долго не хватит. А если снимать ток, то при такой конструкции будет пусть и небольшой, но "откат"/проворот будет и будет накапливаться ошибка.
Я бы сделал на коллекторном движке с экондером и червячным редуктором. Если не требуется скоростные перемещения то PID коэффициенты подобрать просто и даже обратную связь по току можно не делать.
Главное учесть что для экодера нужно использовать аппаратную коррекцию дребезга. Иначе плыть координата будет.
almisnab Автор
09.12.2019 13:23Координаты не важны. Важен крутящий момент и стабильность вращения.
mmMike
09.12.2019 13:32Я же правильно понимаю, что суть "Астротрекера" — это позиционировать объектив как функцию от времени?
Т.е. в момент фотографирования должен быть строго определенный угол?
Это же не непрерывная съемка видео. Дискретная функция..
Конечно можно надеяться на "стабильность вращения" но это частный случай реализации дискретной функции a=f(t) (a — угол, t — время съемки)
Под координатами, я имел в виду угол съемки (полярная система координат).
Впрочем, все равно… Можно добиваться "плавностью вращения", а можно контролем фактических координат (угла).
almisnab Автор
09.12.2019 13:41В том то и дело, что угол съемки выставляется единожды. По полярной звезде. А трекер просто повторяет суточное вращение вокруг полярной звезды. От двигателя требуется: крутящий момент, стабильность и плавность хода, регулировка скорости в зависимости от нужд.
trapwalker
09.12.2019 15:35Похоже mmMike имеет в виду, что ступенчатое дискретное перемещение на фиксированный шаг гораздо более энергоэффективно, чем удержание вала между шагами или (что практически идентично удержанию) медленный плавный поворот (векторное управление).
Напрашивается для оптимизации использование двигателя в шаговом режиме, если речь не идёт о съёмке видео и можно подгадать дискретный поворот монтировки «между кадрами».
Тут хочется отметить, что на фоне прочего оборудования для астро-съёмки мощный китайский, возможно самосборный павербанк не будет играть решающей роли ни по массе ни по стоимости, по этой причине мощный шаговик с удержанием — вполне рабочая схема.
PID регулятор, энкодер, пропорциональное управление, необходимость калибровки, мне кажется, сильно усложняют схему по сравнению с использованием шаговика.
Почему нельзя решать проблему за счет увеличения передаточного числа шестеренок? Ведь при большом передаточном числе становится неважной дискретность шага (тупо деленный на передаточный коэффициент угол шага поглощается погрешностью и низкой добротностью трансмиссии). Можно быстро и достаточно энергоэффективно крутить шаговик и за счет большого передаточного числа получить мощное и плавное движение монтировки. Ну да, придётся делать большую шестерёнку, или ещё одну дополнительную, но простота и предсказуемость…
Zenitchik
09.12.2019 13:40рассчитывает на 5V повербанки
А на страйкбольные/коптерные аккумы не проще рассчитывать?almisnab Автор
09.12.2019 13:48Я рассчитываю на те девайсы, которые есть под рукой у меня и практически у каждого. Повербанк есть у всех. Крону можно купить. (на ночь хватит) а вот аккумы таскать — напряжно. Нужна какая то мобильность.
Zenitchik
09.12.2019 13:55вот аккумы таскать — напряжно
По размеру и весу они сравнимы с повербанком. Только не содержат в себе ненужных самоделке «мозгов». Единственное, что может напрягать — таскать для них зарядное (хотя, оно тоже лёгкое, но дополнительный объём).
reticular
09.12.2019 08:16у самодельных шестеренок не будет люфта если его не закладывать заранее
mmMike
09.12.2019 08:42У любой пары шестерней есть люфт. А уж тем более у самодельных, распечатанных на принтере.
Вопрос только каким люфтом можно пренебречь.
И да. Вариант с самодельными шестернями я то же использовал во многих своих конструкциях. Благо ЧПУ станочек станок позволяет пилить прямозубые эвольвентные шестерни с модулем 2 из стеклотекстолита (фреза 0.8мм) с точностью 0.02мм (микрометром измерял)
Люфт пальцами не ощущается но по дает болтанку луча +-1мм на 2м расстояния.
И это с механизмом регулировки прижима шестерней и шестерни подшипниках (гнездо под подшипник в шестерне). Просто так вручную ось и расстояние между осями… Я бы посмотрел на такого умельца.
Редуктор на ремне дает существенно большую точность и проще в регулировке.
Впрочем, глядя на конструкцию с дверной петлей…
Снимаю свои замечания.
В данном случае, никакая точность и не требуется.
almisnab Автор
09.12.2019 08:20На шестеренках люфта нет. Есть проблема с двигателем. Чуть перекос, и он встает. Не хватает тяги. Но у него преимущество, питание 5в. 5в есть везде, а вот 12 уже тяжко. Можно 9в — Крона. Ищу компромисс между мощностью и вольтажом.
trapwalker
09.12.2019 12:21А в чем проблема с напряжением?
Сейчас полно китайских повышающих модулей вроде такого:

Или даже вот вариант совсем уж люксовый:

А современные павербанки отдают приличный ток и, мне кажется, его на шаговик с избытком хватит. Я бы, кстати, попробовал заюзать шаговик от старого принтера. Их там много и они довольно мощные, причем уже с шестерёнкой на валу. 12 вольт для них не проблема, как я уже сказал, поскольку повышайки 5->12 достаточно эффективны, а недорогого павербанка хватит, мне кажется, на всю ночь работы такого трекера, еще и останется.
Ещё я бы использовал прямую шпильку. Тот конец, который сейчас закреплен жестко — закрепить на шарнире (навернуть гайку и просверлить шпильку вместе с гайкой надев затем на ось, которая, в свою очередь, закреплена на поворотной плоскости).
Мне кажется прямую шпильку пропускать через гайку будет проще и стабильнее по усилию, от этого будет меньше люфта, а за счет большого плеча посадку концевого шарнира можно сделать очень плотной, что тоже позволит избежать лишнего люфта шпильки.
UPD.
Осторожно, кому важно, ссылки на али, похоже, получились с кэшбеком. У меня какое-то расширение для этого в браузере стоит. Но там таких модулей полно и можно выбрать похожие. Эту плату я покупал — работает отлично, крутит не шибко мощный 12V насос от павербанка. Со шнурочком повышайку только заказал, не знаю какой ток отдаст, не пришла еще.
UPD2.
Чуть не забыл. Сейчас павербанки умеют отдавать через USB больше 5 вольт. На али стали появляться специальные переходники, которые сигнализируют источнику о том, что примут 12 или 20 вольт и сами не повышают напряжение, что позитивно сказывается на КПД и надёжности. Для применения в такой самоделке, ИМХО, КПД не сильно важен, поскольку условия не походные и трекер сам по себе довольно громоздкий. Экономить на массе павербанков не приходится.almisnab Автор
09.12.2019 12:29/
… кстати, попробовал заюзать шаговик от старого принтера. Их там много и они довольно мощные…
/
Уже. )) EM-258 или как его зовут на заводе — 7PM-K212-PIT. nema17. Сегодня его буду крутить.
reticular
09.12.2019 12:30нормальный движок, да еще с редуктором 1:64
вы его как включаете? попробуйте драйвер А4988 и ток поставьте 200 мА
какой pps вы ему даете?
максимальные характеристики в районе 80-100ppsalmisnab Автор
09.12.2019 12:46крутил через ULM2003 сегодня через L293N буду.
reticular
09.12.2019 13:41простите забыл указать, что драйвера шаговых двигателей типа A4988 работают с биполярными двигателями
переделка в биполярный www.youtube.com/watch?v=-9Ghv99BeiA
я не люблю нежные шаговички крутить через Н-мосты :( уж очень они от этого греются… оч. сильно греютсяalmisnab Автор
09.12.2019 13:45Я уже его переделал. Просто драйвер L293N на работе был. Сегодня вечером буду через него крутить. Программа на вечер (если из дома не выгонят): прокрутить через L293N переделанный двигатель 28BYJ48, прокрутить EM-258 на 5Vи 9V (крона) и прокрутить M49SP.
reticular
09.12.2019 14:56особенность шаговых двигателей в том, что они потребляют ток всегда и если двигатель за питать от кроны, он проработает не долго, батарейка сядет.
trapwalker
09.12.2019 15:39Это если передаточное число не велико и шаговик работает в недискретном режиме. Я бы делал большое соотношение зубьев и постоянно импульсами крутил бы шаговик. И экономично и плавно.
reisin
09.12.2019 08:22+1Бесполезная конструкция. Детская игрушка, а не трекер. Попробую объяснить:
1. Добиться хорошей точности и равномерного «зацепа» между двумя зубчатыми колесами при 3D печати — задача научной диссертации. Малейшая разница в углах зубов будет приводить к достаточно ощутимым ускорениям/задержкам/биению. Так же важна центровка гайки, вставленной в в основное колесо: 0.1 мм от центра и будет биение.
2. Если верить фото — в качестве шаговика планируется что-то типа 28BYJ-48. У него большой люфт оси, пластиковые шестерни, дробное передаточное число и, самое главное, малая нагрузочная способность, как следствие — неравномерная скорость каждого шага.
3. Дверная петля: однозначные проблемы соосности независимо от стоимости петли. Доски пойдут на изгиб, пусть и небольшой — но все же.
4. Шпилька: шпильки из строймага имеют ужасную точность шага. Не знаю чем их нарезают, но каждый экземпляр шпильки — полностью уникален :) Даже в идеальном случае проблемы начнутся после изгиба шпильки — неравномерный ход гайки.
5. Стабильность конструкции: При креплении средней зеркалки с объективом ( средний вес — 2кг) возникают две проблемы. а) поперечная устойчивость( с одной стороны широкая петля, но с другой — точечное крепление в виде шпильки. 2) Неравномерное распределение веса камеры из-за того, что она будет стоять под углом к горизонту.
6) Точность отверстий под шпильку — очень важный параметр. Учитывая изгиб шпильки, отверстия должны быть просверлены очень точно.
7) Парусность конструкции: Малейший ветерок — и трекер оправдает свое название: на фото будут треки, а не точки.
8) Постоянное накопление ошибки угла. Немного можно скомпенсировать другой конструкцией — гуглить «double-arm trackers»
Это только некоторые недостатки данной конструкции. Максимум что удастся достичь — минуту на 50мм(это если очень повезет). 95% снимков можно будет смело удалять.
про 120мм+ речь вообще не идет: предел — 10-15сек при 98% брака. Ни о каком накоплении сигнала можно даже не думать.
P.S. Я пробовал несколько таких конструкций. Начинал с таких же, заканчивал тяжеленными монолитами, в которых детали точились под заказ на станке у токаря(дорого) и чпу(очень дорого). Закончился весь этот балаган покупкой нормальной монтировки Star Adventurer. Правда, пока пропало желание выезжать ночью в поле — еще не отошел от плясок с бубном с прошлыми сарайками.
Совет автору: не трать зря время и деньги. Если это реальное хобби, а не попытка поснимать че-нибудь — купи специализированный трекер, либо, на крайняк, любую EQ-монтировку от телескопа версии 3+, прицепи туда свой шаговик и наслаждайся процессом. 99% что твоя разработка после первой съемки улетит в мусорку или будет пылиться в подвале/кладовке.almisnab Автор
09.12.2019 08:41Все учимся на своих ошибках. Денег эта конструкция не просит, а как учебное пособие — великолепно. Съемка Глубокого космоса и не планируется. А цена монтировки явно дороже этих 500руб. затраченных на фрезер. У меня экваториальная монтировка (без ведения), планирую на нее ведение примостить. Но ведь всегда интереснее самому создать что то. Шпильки, да, уникальны, но при движении в одну сторону можно пренебречь. Люфт по шпильке — решил. Поставил гайку со втулкой. Про двигатель: ***** плохой он. Не тянет совсем. Нет у него тягового усилия. Касательно него ищу замену. Касательно траты времени и денег — вот тут — astronomy.ru человек собрал 14 разных типов самодельных трекеров. Добился результатов на 135мм на большей половине из них. И надо всегда помнить — «Титаник» построили профессионалы. А наша задача поддержать энтузиастов, заразить людей знаниями и тягой к изобретениям. Хорошего дня.
mmMike
09.12.2019 08:56Все учимся на своих ошибках.
<сарказм>
Извините, но вот зачем учат сопромат, механику? Гораздо проще инженерам учится на ошибках. Причем желательно исключительно на своих.
</сарказм>
И надо всегда помнить — «Титаник» построили профессионалы.
Я просто таки ждал этой цитаты!: )))
almisnab Автор
09.12.2019 10:46Вот вам наверно как минимум 25. и у вас есть опыт и знания. Но для того что бы увлечься чем-то нужен интерес. В данном случае интерес к чему-то, что может сделать 13-15 летний гражданин, обладая базовыми знаниями школы и arduino, и получить приемлемые фото звезд. А так же есть множество «рукастых» людей за 30 и более, которые хотят попробывать себя и применить свои знания. Это именно для них существует Habr и раздел Сделай сам. Так же прошу заметить, что все учатся на своих ошибках. И не важно инженер это или врач. Просто цена ошибки у каждого своя. И чем раньше человек совершит и поймет свои ошибки, тем раньше он перейдет на ваш уровень. Уровень человека знающего сопромат, механику и понимающему что такое «база» в производстве и чертежах. Спасибо.
opetrenko
10.12.2019 00:04Имхую, что сопромат вашим оппонентом не использовался. :):):) да и механика — на уровне здравого смысла.
В его посте — здравый смысл и большой опыт.
Здесь, наверное, важнее хорошее воображение — что и почему будет люфтить и болтаться и опыт.
Я, правда, не в теме. Так уж мне кажется, с точки зрения бывш. препода сопромата, механики и пр.
VolodjaT
09.12.2019 08:44Да, аналогичные наблюдения. После нескольких фото млечного пути на трекер захотелось фокусное подлинее и пришел к такому девайсу photos.app.goo.gl/mJBoJS2t5fQ4vnFAA
naviastro
09.12.2019 10:54Думаю, лучше разделять трекер и полноценную монтировку. Даже в таком виде трекер позволит делать снимки неба на широкоугольник, а если повезёт, то короткими экспозициями на умеренный телевик (85мм, может даже 135мм, экв. fullframe). Сомневаюсь, что автор ожидал чего-то большего, возможности конструкции более чем адекватны затратам на неё. Про шаговик — согласен, хоть и должно его хватать, но гемора с реализацией многовато.
almisnab Автор
09.12.2019 11:16Вы правы. Я и не жду от него чего-то сверх естественного. А шаговый двигатель меня убил. Я прочел robotosha.ru/arduino/stepper-motor-28byj-uln2003-arduino.html и вычитал что тяга 300 г*см. при редукторе 5:1 тяга должна возрасти. По факту — он себя еле еле крутит. переделал его на биполярный. Но с кодом у меня проблемы. Никак не могу получить от него нормального вращения с полной тягой.
trapwalker
09.12.2019 12:51Объясните дилетанту, почему вопрос стабилизации не принято решать программно? Звёзды точечные объекты, удалённые «на бесконечность», почему не делать много кадров с 30 секундной выдержкой, а потом сводить кадры каким-нибудь автоматическим «цифровым» трекером звёзд? Мы же отказались от плёнки, не пора ли отказаться от точных механических монтировок?
Может быть проблемы люфтов дешевых самодельных монтировок можно решать автоматической пост-обработкой? Всё-таки звёздное небо — это не длинный плавный гиперлапс, его трекать и стабилизировать алгоритмически, как мне кажется, куда проще.almisnab Автор
09.12.2019 13:28Так и есть. Но на фокусном например 50мм требуется выдержка на полном кадре 12сек. а на кропе (что чаще бывает) всего 8сек. А если взять 135 фокусное то вообще беда. (4сек на полном кадре и 2,9 на кропе) А этого ничтожно мало для съемки. За это время не успевает экспонироваться. Вот трекер и выполняет роль «удлинителя» выдержки. В любом случае, с трекером, делается как минимум 20 кадров. И сшиваются программно.
trapwalker
09.12.2019 15:51Или вы меня не поняли или я вас.
Всего 4 секунды на фокусном 135 — это из-за вращения Земли? То есть звёзды уезжают на условный пиксель за 4 секунды на таком фокусном расстоянии. Так?
Так вот, я это к тому, что и хрен с ними, пусть уезжают. На 30 секундной выдержке статичной камеры у нас будут приличных размеров дуги вместо точек. Однако, камера же фиксированная, Земля вертится достаточно предсказуемо, звёзды — это довольно статичные (мягко говоря) в наших масштабах объекты.
Если мы знаем очень точно по какой траектории проехала каждая звезда, то можем чисто алгоритмически провести обратную свёртку и «собрать» свет из дуги в точку. Причем задача, вроде бы, хотя я не очень уверен, но жопой чую, достаточно однозначно решается. Зная длительность экспозиции (а затвор же отрабатывает очень точно) и центр вращения (а его по большому количеству дуг тоже можно найти достаточно точно простым усреднением), можно понять какой точке статичной картинки принадлежит какое количество света каждой точки кадра. Блин… так себе объяснил, да?
Сейчас камеры с цифровой стабилизацией умеют по данным акселерометра нивелировать алгоритмически дрожание рук. А здесь никаких акселерометров не надо, земля движется очень стабильно и предсказуемо.almisnab Автор
09.12.2019 18:53
Это без астро трекера. В прошлом году. Но если посмотреть — нет глубины. есть только яркие точки.trapwalker
09.12.2019 19:09А что именно вы подразумеваете под «глубиной» в плоском изображении? Отсутствие резкости вижу. Наблюдается так называемый motion blur. Думаю фото можно сильно улучшить простой сверткой, а если действовать через прямое и обратное преобразование Фурье с промежуточной коррекцией Фурье-образа, то, наверно, и большего достигнуть можно. Может быть после этого появится ожидаемая вами «глубина»?
Попробуйте найти резкую такую фотку с «глубиной» и обработать ее радиальным motion blur в Фотошопе. Если при этом «глубина» пропадет также, то, скорее всего, фотку можно улучшить цифровыми методами.almisnab Автор
09.12.2019 19:53это не одна фотка. тут 18 кадров сложено.
trapwalker
09.12.2019 21:21Тогда описанную мной процедуру нужно проделать над каждым кадром по отдельности, а потом выровнять по максимальной корреляции и перемножить.
almisnab Автор
09.12.2019 21:38Дело в том, что камера за такой коротки промежуток времени не успеет накопить достаточно света. Да, звезды мы увидим. не не более. По этому и нужна длинная выдержка. И повторюсь: на 135мм это 4сек. (камера с полным кадром, по цене она явно не дешёвая. Например НИКОН д850 — 170к) а если на камере с меньшей матрицей то нужно эту цифру разделить на кроп фактор. для Кэнон 1,5. для Никон 1,6. (не для всех моделей, но для многих) Итого мы получим 3сек. За 3 сек матрица не успеет накопить достаточно света. то есть она наберет свет от ярких объектов. А от тусклых объектов нет. И соответственно хоть 100 кадров складывай, она не прорисует. Потому, что не увидит.

JTG
09.12.2019 20:00+1Монтировка нужна прежде всего для накопления сигнала, который может быть даже ниже уровня шума. Если звезда уползёт с пикселя матрицы раньше, чем там накопится полезный сигнал, то решать цифровыми методами будет просто нечего. Поэтому 100 кадров с выдержкой 1 сек != 1 кадру с выдержкой 100 сек. А некоторые объекты — например, детали туманностей или галактик — и вовсе можно увидеть только при сьёмке на длинной выдержке с узкополосным фильтром вроде H-alpha, иначе видимый свет всё перекроет.
Но иногда действительно используют деконволюцию, если нужно поправить расплывшиеся на пару пикселей звёзды.
almisnab Автор
09.12.2019 13:53Так как я с програмированием туговат, прошу помощи. Если есть такие, кто знаком с библиотеками: <AccelStepper.h>, <LiquidCrystal.h>, <Stepper.h>. Да и вообще понимает как это «arduino + L293N +шаговик», а так же, обладает свободным временем. Прошу помочь с запуском этих двигателей.
alexxx_b
09.12.2019 14:27Из моего опыта:
1) Шпильку такую длинную делать не нужно, достаточно 10 сантиметров, такой длины должно на час хватить, чем больше у вас шпилька, тем больше неустойчивости в конструкции.
2) Дёрганий от неравномерности движения гайки, будет намного меньше если стянуть двумя резинками половинки трекера.
3) Нужно обязательно две петли, будет намного меньше погрешности в кручении.
4) Лучше использовать ремень, чем шестеренки.almisnab Автор
09.12.2019 14:29Под рукой 3D принтер. Легче напечатать чем ремень подобрать. :-) Про резинки уже думал. Я и говорю. Сборка покажет все минусы.
trapwalker
09.12.2019 16:00Вот и печатайте шкивы, а не шестеренки. А ремень можно взять какой есть, настраивать же расстояние между шкивами с помощью салазок и регулировочного винта.
Кстати, где-то видел как делают шкивы склеивая три вырезанных из листового пластика круга.
vbifkol
09.12.2019 16:24А зачем шпильку гнуть? Если сделать прямую, а систему гаек (ага, 2 штуки с пружиной) сделать поворачиваемой?
almisnab Автор
09.12.2019 18:46Дело в том, что камера за такой коротки промежуток времени не успеет накопить достаточно света. Да, звезды мы увидим. не не более. Млечный путь не прорисуется. По этому и нужна длинная выдержка. И повторюсь: на 135мм это 4сек. (камера с полным кадром, по цене она явно не дешёвая. Например НИКОН д850 — 170к) а если на камере с меньшей матрицей то нужно эту цифру разделить на кроп фактор. для Кэнон 1,5. для Никон 1,6. (не для всех моделей, но для многих) Итого мы получим 3сек. За 3 сек матрица не успеет накопить достаточно света. то есть она наберет свет от ярких объектов. А от тусклых объектов нет. И соответственно хоть 100 кадров складывай, она не прорисует. Потому, что не увидит.
trapwalker
09.12.2019 21:31+1Ок, я понял так, что, скажем, цветовое разрешение монохромного пикселя =12бит. При этом, чтобы накопить хотя бы малый процент от чувствительности пикселя, нужно определенное количество фотонов. Видимо без монтировки это количество слишком мало и не отличается камерой от шума.
drWhy
Металл у шпилек не ахти, довольно хрупкие они. Гнуть 6 мм будет тяжелее, чем 5. Думаю, после гибки не помешает неторопливо пройтись плашкой по шпильке несколько раз.
Как вариант, купить пруток и нарезать резьбу уже после гибки.
Удачных наблюдений.
almisnab Автор
Гнется нормально. радиус 205мм вышел. просто гайка на ней болтается, люфт.
Wizard_of_light
Можно безлюфтовую гайку сделать — две гайки, пружина между ними и поводок, чтобы гайки крутились синхронно.
naviastro
Люфт всё равно останется, но да, будет меньше. Автор писал, что проблема не с люфтом, а с неравномерным диаметром шпильки. Т.к. движение в одну сторону, то люфт не должен как-то особо мешать.
Люфт практически полностью отсутствует в шарико-винтовой передаче с преднатягом, пока натяг не выбран, люфта не будет, а низкое трение качения позволяет делать натяг весьма значительным. Гнуть такие ШВП можно только с очень большим радиусом)).
almisnab Автор
Радиус 205мм согнул. Не очень качественно но согнул. Позже как решу проблему с шаговиком, продолжение напишу с фотками. Пока главная проблемма — шаговик который не тянет.
Assimilator
Задам потенциально глупый вопрос: А не
прощелучшепрецизионнее было бы сделать с прямой шпилькой? платформы на шарнирах, угловая скорость будет вычисляться через тангенс^-1(скорость прохода шпильки / длина от петли до центра шпильки). Тогда можно и чoткую шпильку взять для каких-нибудь CNC/3d принтеров.trapwalker
Я тоже предлагал, но вот сейчас подумал, что там, похоже, нужна ещё будет какая-то хитрая гайка на карданном подвесе. Хотя при наличии 3d-принтера это может быть и не проблема. Может быть имеет смысл весь моторный блок тоже на шарнир подвесить с одной степенью свободы. Тогда не придётся мудрить шарнир с двумя степенями для гайки.
Assimilator
Да, я это подразумевал когда написал «платформы на шарнирах». Моторный блок на шарнир, и гайку с другой стороны на шарнир. Придётся поднять весь девайс на ножки, но как мне кажется значительно увеличит точность.
almisnab Автор
С люфтом гайки решил. Просто поставил гайки, 2шт, самоконтрящаяся din 985. Но предварительно их погонял по шпильке, что бы легче шли.
HiMem-74
Смажте шпильку машинным маслом (в качестве СОЖ) и шуруповёртом прогоните по ней лерку (плашку). В шуруповёрт зажимать шпильку! а то были прецеденты :-)
almisnab Автор
/ В шуруповёрт зажимать шпильку! а то были прецеденты :-)/
:-))))