
В этой небольшой серии статей я попытаюсь пролить свет на тему построения Embedded Linux устройств, начиная от сборки загрузчика и до написания драйвера под отдельно разработанный внешний модуль с автоматизацией всех промежуточных процессов.
Платформой послужит плата BeagleBone Black с процессором производства Техасских Инструментов AM3358 и ядром Arm Cortex-A8, и, чтобы не плодить мигающие светодиодами мануалы, основной задачей устройства будет отправка смайлов в топовый чат, широко известного в узких кругах, сайта, в соответствии с командами от смайл-пульта. Впрочем, без мигания светодиодами тоже не обошлось.
Итак, на столе лежит чистая, т.е. без каких-либо предустановленных дистрибутивов, плата BeagleBone Black, блок питания, переходник USB-UART. Для общения с платой, переходник нужно подключить к 6-ти выводному разъему, где первый вывод обозначен точкой - это GND, выводы 4/5 - RX/TX соответственно. После установки скорости в какой-либо терминальной программе, например putty, на 115200, можно взаимодействовать с платой, о подключении подробнее и с картинками здесь.
Топовые чаты, пульты и светодиоды будут позже, а сейчас на плату подается питание и плата отвечает CCCCCCCCCCC
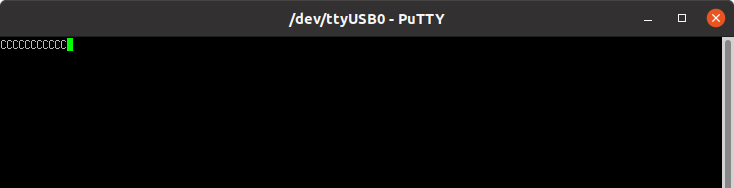
В переводе с бутлоадерского это означает, что первичному загрузчику, зашитому в ROM процессора, нечего загружать. Ситуацию проясняет Reference Manual, где на странице 5025 в разделе 26.1.5 описана процедура начальной загрузки. Процедура такая: первичный загрузчик проводит некоторую инициализацию: тактирование процессора, необходимой периферии, того же UART, и, в зависимости от логических уровней на выводах SYSBOOT, строит приоритетный список источников где можно взять следующий загрузчик, т.е. посмотреть сначала на MMC карте, SPI-EEPROM или сразу ждать данных по Ethernet.
Я использую способ загрузки с помощью SD карты, вот что говорит об этом раздел RM 26.1.8.5.5 на странице 5057: первичный загрузчик сначала проверяет несколько адресов 0x0/ 0x20000/ 0x40000/ 0x60000 на наличие так называемой TOC структуры, по которой он может определить загрузочный код, если так код не найти, то первичный загрузчик, предполагая на SD карте наличие файловой системы FAT, будет искать там файл с названием MLO, как это расшифровывается в RM не сказано, но многие склоняются что Master LOader. Возникает резонный вопрос, где же взять этот MLO?
Das U-Boot
Das U-Boot или просто U-Boot - Universal Boot Loader, один из самых, если не самый, распространенный загрузчик для встроенных систем, именно с его помощью можно создать требуемый вторичный загрузчик (MLO), который будет загружать третичный загрузчик (сам U-Boot), который будет загружать ядро Linux.
Перед скачиванием U-Boot, стоит сходить в репозиторий и найти тег последней версии, далее
git clone -b v2021.01 https://gitlab.denx.de/u-boot/u-boot --depth=1U-Boot содержит больше тысячи конфигураций, в том числе нужную:
u-boot/configs/am335x_evm_defconfig
Это конфигурация платы AM335x evaluation module, этот модуль лежит в основе других плат, в том числе BeagleBone Black, что можно видеть, к примеру, по Device Tree, но о нем позже. Настраивается и собирается U-Boot с помощью Kconfig, то же, что используется и при сборке ядра Linux.
Установка нужного конфига:
make am335x_defconfigНастройка:
make menuconfigМожно, к примеру, убрать, установленную по умолчанию, 2-х секундную задержку при загрузке платы с U-Boot
Boot options ---> Autoboot options ---> (0) delay in seconds before automatically booting
В вышеуказанных командах, используется компилятор по умолчанию, если таковой в системе установлен, и, скорее всего, он не подходит для ARM процессоров, и здесь пора упомянуть о кросскомпиляции.
ARM Toolchain
Один из видов кросскомпиляции это сборка на одной архитектуре, как правило x86-64, именуемой HOST, исходного кода для другой, именуемой TARGET. Например, для TARGET архитектуры ARMv7-A, ядра ARM CortexA-8 процессора AM3358, платы BeagleBone Black. К слову, чтобы не запутаться в ARM’ах, даже есть свой справочник, так их много и разных.
Сама сборка осуществляется набором инструментов - компилятор, компоновщик, runtime библиотеки, заголовочные файлы ядра; так называемый Toolchain. Toolchain можно собрать самостоятельно либо с помощью crosstool-NG, а можно взять готовый от компании Linaro, или самой ARM. Здесь я буду использовать Toolchain от ARM “GNU Toolchain for the A-profile Architecture Version 10.2-2020.11, x86_64 Linux hosted cross compilers, AArch32 target with hard float (arm-linux-none-gnueabihf)", если не вдаваться в излишние подробности, то это все означает, что набор инструментов будет работать на десктопной машине с Linux и собирать программы для 32-х битной ARM платформы с аппаратной поддержкой операций с плавающей запятой.
Теперь для успешной сборки U-Boot, нужно указать в переменных ARCH и CROSS_COMPILE требуемые архитектуру и путь к кросскомпилятору соответственно, например так
Установка конфига:
make ARCH=arm CROSS_COMPILE=~/toolchain/bin/arm-none-linux-gnueabihf- am335x_evm_defconfigНастройка:
make ARCH=arm CROSS_COMPILE=~/toolchain/bin/arm-none-linux-gnueabihf- menuconfigСборка:
make ARCH=arm CROSS_COMPILE=~/toolchain/bin/arm-none-linux-gnueabihf-Либо использовать export ARCH/CROSS_COMPILE, чтобы каждый раз не набирать все это. Я, для наглядности, буду каждый раз набирать все это.
После сборки U-Boot, в папке появятся необходимые файлы, а именно
MLO - вторичный загрузчик (напомню, первичный зашит в самом процессоре)
u-boot.img - третичный загрузчик, собственно U-Boot
Для успешной загрузки с SD карты, нужно ее некоторым образом разметить. Карта должна содержать минимум два раздела, первый, отмеченный как BOOT, с файловой системой FAT, второй раздел с ext4. Разметить карту можно, к примеру, программой fdisk.
Теперь нужно просто скопировать результаты сборки U-Boot в FAT раздел, вставить карту в BeagleBone Black и в терминале наблюдать уже более осознанный ответ платы

В ответе платы есть такие строки
...
Failed to load ‘boot.scr’
Failed to load ‘uEnv.txt’
…
U-Boot, во время загрузки, смотрит наличие дополнительных команд, сначала в файле boot.scr, при его наличии, затем, если boot.scr не нашлось, в uEnv.txt. Эти файлы, помимо очередности при поиске, отличаются тем, что в файле uEnv.txt, дополнительные команды представлены в текстовом виде, т.е. он проще для восприятия и редактирования. U-Boot не создает файлы с дополнительными командами, делать это нужно самостоятельно.
uEnv.txt:
bootpart=0:1
devtype=mmc
bootdir=
bootfile=zImage
bootpartition=mmcblk0p2
console=ttyS0,115200n8
loadaddr=0x82000000
fdtaddr=0x88000000
set_mmc1=if test $board_name = A33515BB; then setenv bootpartition mmcblk1p2; fi
set_bootargs=setenv bootargs console=${console} root=/dev/${bootpartition} rw rootfstype=ext4 rootwait
uenvcmd=run set_mmc1; run set_bootargs;run loadimage;run loadfdt;printenv bootargs;bootz ${loadaddr} - ${fdtaddr}Здесь происходят некоторые манипуляции в результате которых U-Boot загружает из SD карты в RAM по адресу [loadaddr] - образ ядра [zImage], и по адресу [fdtaddr] - дерево устройств [Flattened Device Tree]. Формируются аргументы, передаваемые ядру Linux, это параметры консоли, к которой подключен переходник USB-UART [console=ttyS0,115200n8], место размещения корневой файловой системы [bootpartition=mmcblk0p2], параметры разрешения на чтение/запись корневой файловой системы [rw], ее тип [ext4] и ожидание появления корневой файловой системы [rootwait]. Чтобы раскрутить всю цепочку действий U-Boot, можно, после того как U-Boot прекратит попытки найти что бы загрузить и выдаст приглашение на работу в виде =>, ввести команду printenv, она покажет значения всех переменных, которыми располагает U-Boot.
=> printenv

В завершении своей работы U-Boot, командой bootz, вместе с вышеуказанными аргументами и адресом дерева устройств, передает управление ядру Linux.
Ядро Linux
Прежде чем приступать к любым действиям с ядром, стоит заглянуть сюда и убедится в наличии необходимых пакетов. Следующим шагом нужно определиться с тем, какую версию ядра использовать. Здесь я использую версию 5.4.92 и вот по каким соображениям. Одной из основных причин того, что не стоит брать просто последнюю версию ядра, доступную на данный момент, наряду с наличием драйверов, является невозможность быстро протестировать это ядро на всем разнообразии платформ поддерживаемых Linux, а значит можно потратить кучу сил и времени на исправление неполадок, если что-то пойдет не так, и не факт что это вообще получится сделать. BeagleBone Black имеет официальный репозиторий, где можно найти версию ядра, протестированную на данной платформе, и long term версия 5.4.92 была последней на тот момент.
Нужный конфиг, расположенный в /arch/arm/configs, называется omap2plus_defconfig, OMAP - это название линейки процессоров, продолжением которых является AM3358, впринципе, подойдет и более общий multi_v7_defconfig.
Сам конфиг пока остается без изменений, поэтому можно просто его установить и запустить компиляцию ядра(zImage), модулей(modules) и дерева устройств(dtbs)
make -j6 ARCH=arm CROSS_COMPILE=~/toolchain/bin/arm-none-linux-gnueabihf- omap2plus_defconfigmake -j6 ARCH=arm CROSS_COMPILE=~/toolchain/bin/arm-none-linux-gnueabihf- zImage modules dtbs
Проходит некоторое время.
Результат сборки, в виде zImage, находится в /arch/arm/boot, там же в папке /dts находится скомпилированное дерево устройств am335x-boneblack.dtb, оба отправляются на SD карту к файлам загрузчика. На этом FAT раздел SD карты можно считать скомплектованным. Итого, там присутствуют:
MLO - вторичный загрузчик
u-boot.img - третичный загрузчик
uEnv.txt - дополнительные команды загрузчика
zImage - образ ядра Linux
am335x-boneblack.dtb - скомпилированное дерево устройств платы
Еще при сборке ядра заказывались модули ядра, но они уже относятся к корневой файловой системе.
Корневая файловая система. BusyBox
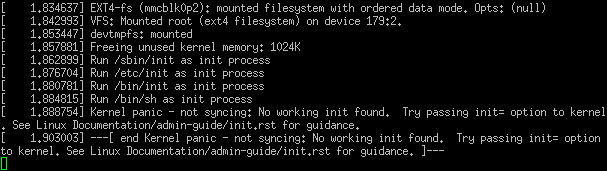
Ядро получает корневую файловую систему путем монтирования блочного устройства, заданного в, переданном при запуске ядра, аргументе root=, и далее, первым делом, исполняет оттуда программу под названием init.
Если запустить BeagleBone Black, имея только вышеуказанные файлы для FAT раздела, то ядро будет паниковать по причине отсутствия init и, в целом, по причине пустой rootfs, т.е. корневой файловой системы.
Можно шаг за шагом создать все минимально необходимые компоненты корневой файловой системы, такие как оболочка, различные демоны запускаемые init, сам init, конфигурационные файлы, узлы устройств, псевдофайловые системы /proc и /sys и просто системные приложения. Для желающих совершать подобные подвиги, существует проект Linux From Scratch, здесь же я воспользуюсь швейцарским ножом встроенных систем с Linux, утилитой BusyBox.

Скачивание последней, на тот момент, версии:
git clone -b 1_32_1 https://git.busybox.net/busyboxНастройка конфигурации по умолчанию:
make defconfigЧтобы не думать сейчас о разделяемых библиотеках, стоит установить статическую сборку BusyBox:
make menuconfigSettings ---> Build static binary (no shared libs)
Сборка:
make -j6 ARCH=arm CROSS_COMPILE=~/toolchain/bin/arm-none-linux-gnueabihf-Установка в папку по умолчанию _install:
make ARCH=arm CROSS_COMPILE=~/toolchain/bin/arm-none-linux-gnueabihf- installТеперь в папке _install можно видеть будущую корневую файловую систему, в которую нужно добавить некоторые вещи.
Папки, помимо созданных BusyBox:
mkdir dev etc lib proc sysСтартовый скрипт. Дело в том, что, запускаемая в первую очередь, программа init, делает много полезного, например, выводит в консоль приглашение, но до выдачи приглашения, init проверяет наличие стартового скрипта /etc/init.d/rcS, и, при наличии, запускает его.
mkdir ./etc/init.d
touch ./etc/init.d/rcS
chmod +x ./etc/init.d/rcSСам скрипт:
#!/bin/sh
mount -t proc proc /proc
mount -t sysfs sysfs /sysЭтот скрипт монтирует псевдофайловые системы proc и sysfs, и ничего не мешает ему запускать, к примеру, пользовательскую программу, отвечающую за функционал устройства, но лучше будет делать это в отдельных скриптах, скомпонованных по функциональному назначению.
Стоит сказать, что работа init, на самом деле, начинается с чтения конфигурационного файла /etc/inittab, но BusyBox’овская init включает таблицу inittab по умолчанию, если таковой не окажется в корневой файловой системе.
Теперь пора вспомнить про модули ядра. Их также нужно разместить в корневой файловой системе в /lib/modules/5.4.92/, но сейчас они разбросаны по всей папке в которой собиралось ядро. Чтобы собрать модули в кучу, нужно в папке с ядром выполнить
make -j6 INSTALL_MOD_PATH=~/busybox/_install modules_installГде в INSTALL_MOD_PATH указать путь к папке с корневой файловой системой, кросскомпилятор указывать не нужно, т.к. здесь модули ядра просто копируются по месту назначения. В результате папка /lib корневой файловой системы пополнится разделом /lib/mudules/5.4.92/ содержащим модули ядра, полученные при компиляции ядра.
Осталось скопировать все содержимое папки _install во второй раздел SD карты, тот который с ext4, и поменять владельца всего содержимого на root.
После запуска BeagleBone Black с корневой файловой системой, через 1.910315 секунды после старта ядра, система предложит активировать консоль и начать работу.

Но начать работу в такой системе, скорее всего не получится, т.к. в ней нет ничего кроме системных утилит BusyBox и моей небольшой программы, нарисовавшей приветствие, зато, эта система поможет получить общее представление о том, какая магия происходит внутри подобных устройств. Именно общее, т.к. в реальных устройствах, из-за необходимости минимизации времени загрузки, ограниченности ресурсов, заточенности под конкретную задачу, различий между ARM процессорами, построение системы может сильно отличаться. Например, на малинке, вообще сначала стартует графический процессор, который затем запускает все остальное.
По поводу же заявленных в начале драйверов, взаимодействия с внешними устройствами, автоматизации сборки и некоторого полезного функционала, пойдет рассказ в следующей статье.




F0iL
Отличный разбор.
Можно еще добавить, что при отладке подобного часто еще используют nfsroot: ядро Linux после запуска монтирует rootfs по сети, в итоге нет нужды на каждый чих перепрошивать флешку или перетыкать SD-карту, достаточно просто обновить нужные файлы в образе системы на десктопе или на файл-сервере.
DarkTiger
Только не новичку :) Там слишко много неочевидных опций, как в командной строке, так и в defconfig ядра. Одна только необходимость прописывать ip в конфиге /etc/sysemd/network/eth… чего стоит. А ведь это далеко не единственное, на чем можно оазбить лоб начинающему