

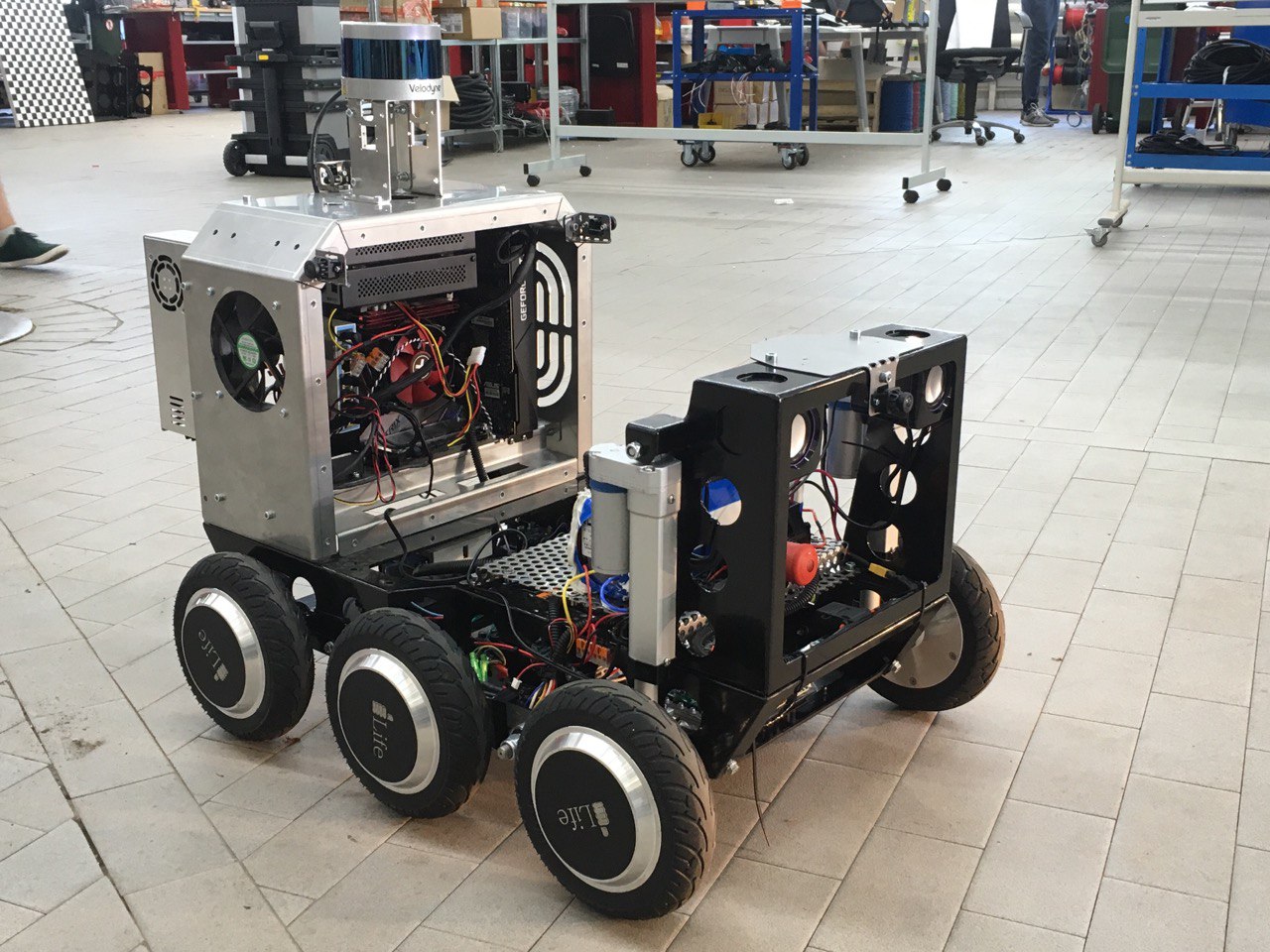
Встречайте! Мы выпустили на улицу роботов третьего поколения — модель R3 уже можно встретить в Москве, Иннополисе и США. До конца года мы планируем произвести больше сотни таких роботов, и в дальнейшем будем расширять флот за счёт них.
Меня зовут Алексей, я работаю в Yandex Self-Driving Group: несу ответственность за разработку железа трёх (с половиной) поколений роботов Яндекса. В этой статье я не только коротко расскажу про новое поколение, но и поделюсь историей создания роботов-курьеров. Вы сможете взглянуть их глазами на велосипедиста, узнаете, как собрать прототип из фанеры и трёх гироскутеров, а также почему мы выбрали менее дальнобойные лидары. Всё это я дополню роликами и фотографиями разных этапов разработки. Поехали!
Чем третье поколение отличается от первого
Первого робота мы показали миру 7 ноября 2019 года. С тех пор мы доставляли заказы и в снег, и в дождь, и в бурю, и под солнцем Дубая, и по широким тротуарам Огайо, и по узким, иногда ремонтируемым, улицам Москвы. Итого на данный момент мы разработали, изготовили и обкатали три с половиной поколения роботов: R1, R1.5, R2 и R3. Весь накопленный опыт создания и эксплуатации первых поколений мы использовали в третьем. Сейчас поясню, чем роботы R3 отличаются от предыдущих.
Робот стал больше и вместительнее. Теперь мы можем перевозить до 20 кг полезного груза в отсеке объёмом 60 л — это шесть пицц диаметром 40 см и три двухлитровые бутылки Кока-Колы. В роботов второго поколения помещалось только пять пицц, а первое поколение возило только пиццу диаметром 35 см.

R3 едет на вечеринку
Начиная со второго поколения, крышка робота открывается и закрывается автоматически: для этого достаточно нажать кнопку в приложении. Робот третьего поколения научился обнаруживать попытки пользователя закрыть крышку рукой и помогать ему в этом. Грузовой отсек запирается на замок и открывается только из приложения и только для получателя заказа.
Конструкцию робота мы разработали сами, а производство деталей и сборку доверили российским подрядчикам. Стандартные компоненты — чипы, элементную базу, разъёмы, жёсткие диски, процессоры, — конечно, покупаем. Радары и колёса тоже покупные, как и лидары — но именно их мы вскоре поменяем на свои. В первом поколении роботов доля покупных компонентов была больше: мы стремились переиспользовать всё что только можно, чтобы ускорить появление прототипа. Во втором мы разработали и обкатали часть модулей, в третьем случилась еще одна большая итерация разработки электроники.
Роботы первого поколения работали 3,5 часа без подзарядки. Потом мы проапгрейдили первое поколение, установив процессоры ARM (читайте про это ниже), и время работы увеличилось до 7 часов. R2 за счёт оптимизации электроники работали 10 часов. А третье может ездить 8 часов, зато батарейку можно заменить за несколько секунд — робот сразу же поедет доставлять дальше. Чтобы обеспечить горячую замену, мы оборудовали робота резервной несъёмной батареей небольшой ёмкости. Оба аккумулятора по нашему ТЗ собирает российская компания из покупных ячеек. Корпус — наш.
Вот как происходит замена:
У роботов первого поколения была жёсткая подвеска без амортизаторов, с балансирами на передних двух осях. Теперь все оси — на независимых рессорах, а балансиры переехали назад: опыт и эксперименты показали, что так робот едет лучше. «Мягкую» подвеску мы испытали ещё на R2 — и с этим продакшен-опытом за плечами спроектировали подвеску R3. В разделе про разработку я ещё вернусь к тому, как мы тестировали новую подвеску.
Роботам третьего поколения мы поставили лидар, у которого 64 луча (в R1 было 16) и большой угол зрения по вертикали. Чтобы лучше задействовать большое поле зрения, мы перенесли лидар в переднюю часть робота. А чтобы раньше замечать машины, когда робот пересекает пешеходные переходы, в рамках апгрейда R1 мы расположили ещё два радара по бокам. Радары позволяют детектировать движущиеся объекты и быстро оценивать скорость их приближения. Ещё мы поставили дополнительные камеры со всех сторон (у первого поколения была только одна камера). А на R3 заменили объективы на фишай для увеличения поля зрения и охвата в 360 градусов.
Начиная со второго поколения мы используем ультразвуковые сенсоры собственной разработки. У первого были обычные парктроники. С наших сенсоров мы можем снять больше данных, полезных для езды в разных условиях, — с покупными сенсорами это было невозможно. В R3 мы увеличили их количество и оптимизировали конструкцию сенсоров.

Теперь ориентироваться в окружающем мире роботам помогает два радара, один лидар, пять камер, акселерометр и GNSS. Функциональную безопасность обеспечивают девять ультразвуковых сенсоров.
Вот как выглядит лидарное облако с нашего робота:
Масса пустого робота — 70 кг, максимальная скорость — 8 км/ч. У робота шесть ведущих мотор-колёс. Передняя ось на независимой рессорной подвеске, а задние две — на рессорно-балансирной (как у КАМАЗа, например). Минимальный дорожный просвет при полной загрузке — 100 мм.

Мы не сразу пришли к такой конструкции робота. Первые два поколения позволили собрать информацию при езде в боевых условиях и уточнить требования к платформе. Каждое следующее поколение проектировалось с учётом опыта, полученного при эксплуатации предыдущих. Ниже я расскажу, как это было.

Три поколения роботов-курьеров, слева направо: R1, R2, R3
R1: как всё начиналось
Мы начали разработку робота-курьера в июне 2019 года. С помощью первого поколения мы хотели как можно скорее проверить, насколько софт, разработанный для большого беспилотного автомобиля, будет применим для управления роботом-курьером на городских тротуарах. Большой беспилотник на тот момент уже умел ездить без водителя по дорогам общего пользования.
Прототип старались делать из покупных компонентов, по возможности не разрабатывая ничего своего. Ведь мы тогда не знали, каким должен быть робот, поэтому тратить ресурсы на разработку «того — не знаю что» in-house было нецелесообразно.
Инженерный центр
Всё, о чём я расскажу ниже, было бы невозможно, если бы у нас не было Инженерного центра. Это волшебное место на юге Москвы, где идеи становятся реальностью. Команда центра — увлечённые своим делом люди с большим опытом из разных индустрий, которые могут полностью разобрать и собрать любую машину, хоть беспилотную, хоть гоночную. У команды есть все необходимые инструменты и оборудование, чтобы быстро производить опытные серии деталей. Это сильно сокращает цикл разработки, когда нужно делать несколько итераций. Все роботы, которые есть у нас сейчас (полторы сотни) — собраны здесь.

Инженер-электронщик
Шасси
Мы сформулировали первоначальные требования к шасси нашего робота. Соответствие этих требований действительности предстояло проверить в реальных условиях, поэтому мы стремились как можно быстрее получить работающий прототип.
Затем мы провели мозговой штурм и исследование известных конструкций шасси. В нашей команде были ребята с опытом проектирования и постройки роботов и автомобилей, поэтому вариантов было придумано и рассмотрено очень много. После обсуждений и споров выбрали рабочий вариант: шестиколёсное шасси на мотор-колёсах, все колёса ведущие.
Итак, для первого прототипа мы взяли 8-дюймовые колёса и драйвера от гироскутеров, разработческую плату Nucleo и собрали из фанерки и алюминиевых профилей прототип шестиколёсного шасси, управляемый с пульта. Прошивку для драйверов модифицировали под свои задачи, а команды управления рассылали через Nucleo. Внимательный читатель заметит на картинке ниже VoltaBox из моего прошлого проекта, который пошёл в дело в качестве пятивольтового DC/DC-преобразователя.

Прототип шасси R1
К девборде подключён Wi-Fi адаптер, в который мы слали команды с ноутбука. На ноутбуке был запущен Python-скрипт, преобразующий команды с Bluetooth-джойстика. Мы до сих пор иногда используем этот скрипт для того, чтобы обкатать какие-то новые низкоуровневые хардварные фишки робота.
Платформа была собрана и подготовлена к тестам примерно за два дня одним инженером-конструктором и одним embedded-инженером. А менеджер (я) стоял рядом и держал болгарку.
Большая Красная Кнопка для выключения системы была расположена на самом прототипе, поэтому во время первых тестов я сидел сверху и на всякий случай держал руку где-то рядом с ней. И при первом же тесте на земле это пригодилось: драйвера от гироскутеров оказались слишком умными и при определённом сочетании команд управления платформа начинала неконтролируемо вращаться на месте. Интересно, что на тестах подвешенной платформы, которые мы делали до запуска на полу, мы такого поведения не заметили.
Вот один из первых проездов на платформе:
В целом платформа доказала, что пригодна для использования в прототипе: она была достаточно грузоподъёмной и быстрой. Но тесты показали, что жёстко закреплённые колёса нам не подходят: на неровностях шасси начинало поворачивать непредсказуемо, из-за того что не все колёса касаются земли. Мы добавили балансирную подвеску передних двух осей и дополнительно загрузили среднюю ось с помощью пружин, чтобы робот поворачивал преимущественно вокруг центра средней оси — это необходимо для качественного управления из беспилотного софта. Мы также тестировали на прототипе активное управление качалками с помощью актуаторов. Они не показали себя эффективными, поэтому мы отказались от них в пользу более простой схемы.
Шасси с актуаторами. Потом на их место поставили пружины, работающие на растяжение
После тестов конструкторский отдел приступил к разработке робота, которого можно было бы испытывать на улице. Серийность предполагалась до 10 штук. Технологиями производства были выбраны вакуумная формовка пластика, резка и гибка листового металла. Некоторые детали были напечатаны на 3D-принтере, отфрезерованы на ЧПУ и выточены на токарном станке. Вся разработка конструктива происходила внутри команды. Большинство деталей изготовили в России внешние подрядчики.
Сенсоры
Главной задачей MVP было доказать возможность применения нашей беспилотной технологии в принципиально новом формате робота-курьера. Поэтому важно было использовать готовые знакомые нам компоненты, чтобы как можно быстрее проверять гипотезы. Для этого мы выбрали тот лидар, который ставим по бокам нашего беспилотного автомобиля. У нас уже были обученные под него модели и мы надеялись, что они сразу же взлетят на роботе и не потребуется долго собирать новые датасеты. Максимальная дальность действия этого лидара — 100 метров, у него 16 лучей, которые обращаются на 360 градусов вокруг вертикальной оси, сканируя пространство. Из-за особенностей работы оптимально было его поставить в заднюю часть робота.
Кроме детекции объектов, лидар используется для определения положения робота в пространстве — локализации. Алгоритм совмещает полученные с помощью лидара точки с сохранённой в памяти трёхмерной картой и ищет наилучшее совпадение. Для этого лидар должен видеть статические объекты вокруг робота на 360 градусов — здания, столбы, остановки, мусорные корзины. Вертикальный угол обзора нашего лидара был относительно небольшой — 30 градусов — поэтому для надёжности локализации лидар на роботе был установлен строго вертикально.
Чтобы улучшить ближние детекции, мы добавили в переднюю часть робота два парктроника. Сначала мы использовали готовые парктроники. Как и любые стандартные, они пищали, когда видели препятствие, и робот мог напугать пешеходов. Поэтому мы вытащили пищалку из блока управления. Кроме того, нам пришлось хакнуть протокол связи между блоками управления и индикации — иначе в принципе не удавалось пользоваться парктроником: изначально он не предназначался для того, чтобы считывать с него данные в электронном виде.
На первых порах мы просто смотрели на дистанцию на парктрониках и по определённому порогу замедлялись, а потом останавливались. Из-за особенностей работы софта верхнего уровня — там использовалась велосипедная модель движения, — мы не могли разворачиваться на месте. Это нельзя было исправить без вложения значительных ресурсов разработчиков для реализации новой, «танковой», модели движения робота. Поэтому мы сделали на нижнем уровне разворот на месте в случае, когда робот упирался в препятствия парктрониками. Разворачивались в сторону до тех пор, пока не переставали видеть препятствие, затем вступали в действие алгоритмы беспилотника, и мы строили плавную траекторию. В итоге мы успешно и красиво объезжали препятствие. Танковая модель была реализована для серийного робота, а реакция на парктроники перенесена на верхний уровень.
Кроме этого, в первом роботе была установлена камера, но она использовалась только для записи видео во время тестовых проездов.
Мозги
В беспилотном автомобиле установлена серьёзная серверная x86-платформа с двумя процессорами и тремя видеокартами. Конечно, мы не могли себе позволить возить такое в роботе из-за массы, габаритов и энергопотребления. Нужно было масштабировать эту платформу под ограниченные ресурсы.
Из-за того, что весь софт тогда был написан под x86, мы не стали на этом этапе рассматривать ARM-based embedded решения. Переезд на ARM стоил бы дорого по времени и ресурсам, поэтому, забегая вперёд, скажу, что переезжали мы уже в следующем поколении, когда доказали принципиальную возможность передвижения под управлением беспилотного софта.
Сначала мы хотели взять ноутбук для VR-игр, который игроки носят за спиной. Но оказалось, что таких на тот момент больше не производили. Мы решили собрать свою платформу. Взяли mini-ITX материнку, одну видеокарту, самый мощный на тот момент десктопный процессор и попробовали со всем этим взлететь. Получилось.
Кроме вычислителя, и нижнего уровня управления, на борту прописались Ethernet-роутер MikroTik, модуль GeoHub, который был разработан ранее для беспилотника (это Embedded Linux железка, которая отвечает за получение GNSS-сигнала и акселерометр), два модуля связности (LTE+Wi-Fi) — тоже от беспилотника, блоки питания, аккумулятор.

Структурная схема R1
Сравните эту схему со схемой R3 (в конце поста). Тут всего один компонент зелёного цвета — это модуль, разработанный нами ранее для беспилотного автомобиля. Мы старались по максимуму переиспользовать готовые компоненты, чтобы ускорить проверку гипотез.

Первые два робота R1
Масштабирование и адаптация софта
Основной задачей было выключить всё ненужное и не выключать ничего нужного. Чтобы разобраться, что нужно, а что не нужно, я ходил по командам разработчиков и задавал много вопросов занятым большим беспилотником людям, много экспериментировал. Для экспериментов мы собрали прототип без внешней обшивки и приклеили на него монитор с тачскрином для удобства.
Вот как происходила первая автономная доставка воды спикеру на одном из наших внутренних мероприятий:
Итоги
За четыре месяца нам удалось с нуля спроектировать, собрать и запустить в городе прототип, который можно было показать всему миру, а также масштабировать софт под весьма ограниченные ресурсы и другую платформу. Мы почти не трогали код, в основном меняли конфиги. В этой конфигурации мы собрали ещё несколько роботов, которые выехали в город — около нашего офиса на Льва Толстого и в Сколково, — и совершили первые коммерческие доставки. Кстати, если вам интересно узнать про развитие нашего проекта в коммерческом плане, то 4 декабря об этом будет рассказывать Паша Воробьёв в треке Product на конференции YaTalks.

R1 в Сколково
В наследство от большого беспилотника роботу досталась плавность движений и продуманность траекторий. Конечно, после успешных первых проездов появилась выделенная software-команда, которая стала оптимизировать алгоритмы и код уже специально для робота и проделала за эти два года огромную работу. Но это другая история.
R1.5: переезд на ARM
Первые роботы на x86 жили от батарейки около трёх часов. Даже на тестах приходилось постоянно думать об оставшемся уровне заряда и планировать всё так, чтобы его хватило. Для работы в продакшене необходимо было жить не менее 8 часов (смену). Замеры энергопотребления показали, что большую часть заряда потребляет вычислитель, причём даже когда робот просто стоит на месте. Переход на ARM сулил значительный выигрыш в энергопотреблении, но мы знали, что это будет непросто.
Софт
Внушительная кодовая база, библиотеки, инструменты разработки, инфраструктура — всё было заточено под x86. Поэтому мы знали, что переезд на ARM будет сложной и ресурсоёмкой задачей. Нужно было оптимизировать работу софта под новую архитектуру, соблюдая при этом совместимость с большим беспилотником, ведь у нас одна кодовая база. После того, как код под ARM для робота был готов, он всё ещё жил в отдельной ветке. Её мёрж в dev занял в итоге около месяца.
Инфраструктура тоже сначала не была предназначена для новой платформы. На x86-код собирался прямо на роботе. На ARM мы такого себе позволить уже не могли, поэтому пришлось научиться собирать код в облаке, а потом привозить его на робота в виде бинарей.
А потом и Apple, посмотрев на наш успех, решили переехать на ARM!
Железо
Чтобы ускорить получение робота с большим временем жизни и обкатать новую вычислительную платформу, мы решили разделить разработку нового шасси (R2, о котором ниже) и переезд на ARM. Мы взяли платформу R1 и на её основе разработали робота R1.5 и комплект для апгрейда R1 в R1.5 с ARM-based вычислителем.
В прототипах мы соединяли компоненты проводами по месту. В R1.5 мы сделали первую итерацию по улучшению проводки робота. В том числе, разработали специальную плату расширения для Nucleo, к которой можно подключать все периферийные устройства с помощью разъёмов, а также вынесли на неё модуль акселерометра, чтобы получить возможность замкнуть обратную связь по акселерометру на нижнем уровне и избавиться от громоздкого для робота GeoHub.
Также для этого поколения мы разработали плату PMU, Power Management Unit. Она позволила мониторить токи и напряжения на каждой ветке, а также программно контролировать питание каждой из них. Иногда это позволяло удалённо перезагружать подвисшие периферийные устройства.

3D-модель Power Management Unit
Мы заменили покупные контроллеры колёс от гироскутеров на свои собственные. На наших контроллерах удалось достичь более высокого КПД колёс. Ещё мы изменили интерфейс UART на более надёжный и привычный для нас CAN и заложили хороший фундамент для будущих разработок, поддержав энкодер и контроль температуры двигателя. Потом мы смогли использовать наш контроллер двигателя для других задач.

Два минорных поколения MotorControl. Найдите 10 отличий
В первых поколениях роботов мы использовали батарейки от электровелосипеда. Чтобы оптимизировать компоновку робота и получить обратную связь (заряд, здоровье, нагрузка) от батарейки, мы заказали батарейку по собственному ТЗ у одного российского производителя. Наши батарейки стали более ёмкими и научились отдавать обратную связь по CAN.
Сенсоры
В первом поколении у нас была одна IP-камера. В R1.5 мы увеличили их число до четырёх, изменили интерфейс на GMSL (как в большом беспилотнике). Камеры расположили по всем сторонам робота. Теперь мы стали видеть всё. Также добавили радары, чтобы издалека обнаруживать приближающиеся автомобили во время пересечения пешеходных переходов.
Итоги
Время работы новой платформы от одного заряда увеличилось более чем вдвое. Мы переоборудовали роботов R1 и собрали ещё пару десятков R1.5, которые были основными рабочими лошадками в российских локациях в Москве и Иннополисе до середины 2021 года, после чего их постепенно заменили на роботов следующего поколения.
R2: пришельцы на Земле
R2 задумывался как робот с серийностью до 100 штук, с повышенной прочностью корпуса, увеличенным размером грузового отсека и автоматической крышкой. За его увеличенные, по сравнению с первыми моделями, размеры и округлые формы ребята из эксплуатации прозвали роботов этого поколения «пухляшами». Роботы не обиделись. Наверное. В 2139-м узнаем.

Конструкция
Во время проектирования мы уделили много внимания дизайну. Нам хотелось, чтобы на корпусе не было стыков, поэтому он имеет конструкцию типа монокок и выполнен из стеклопластика. Когда мы отдали этих роботов в производство, подрядчики прокляли нас: человеку нужно было влезать внутрь формы и выкладывать стеклопластик изнутри.

Тестирование объёма грузового отсека на прототипе из 3D-принтера

Алюминиевое основание робота R2
В основании робота — алюминиевая сварная рама. На раму крепятся детали подвески, батарейка, кожухи из листового алюминия, электроника и монокок. На монококе размещаются сенсоры. Сенсоры важно размещать на жёсткой конструкции, которую не тревожат во время ремонтов, потому что их калибруют друг к другу: даже после небольших подвижек вся система потребует перекалибровки. Грузовая корзина целиком вынимается из робота: так практически вся электроника оказывается на виду — это очень удобно для ремонта и обслуживания.
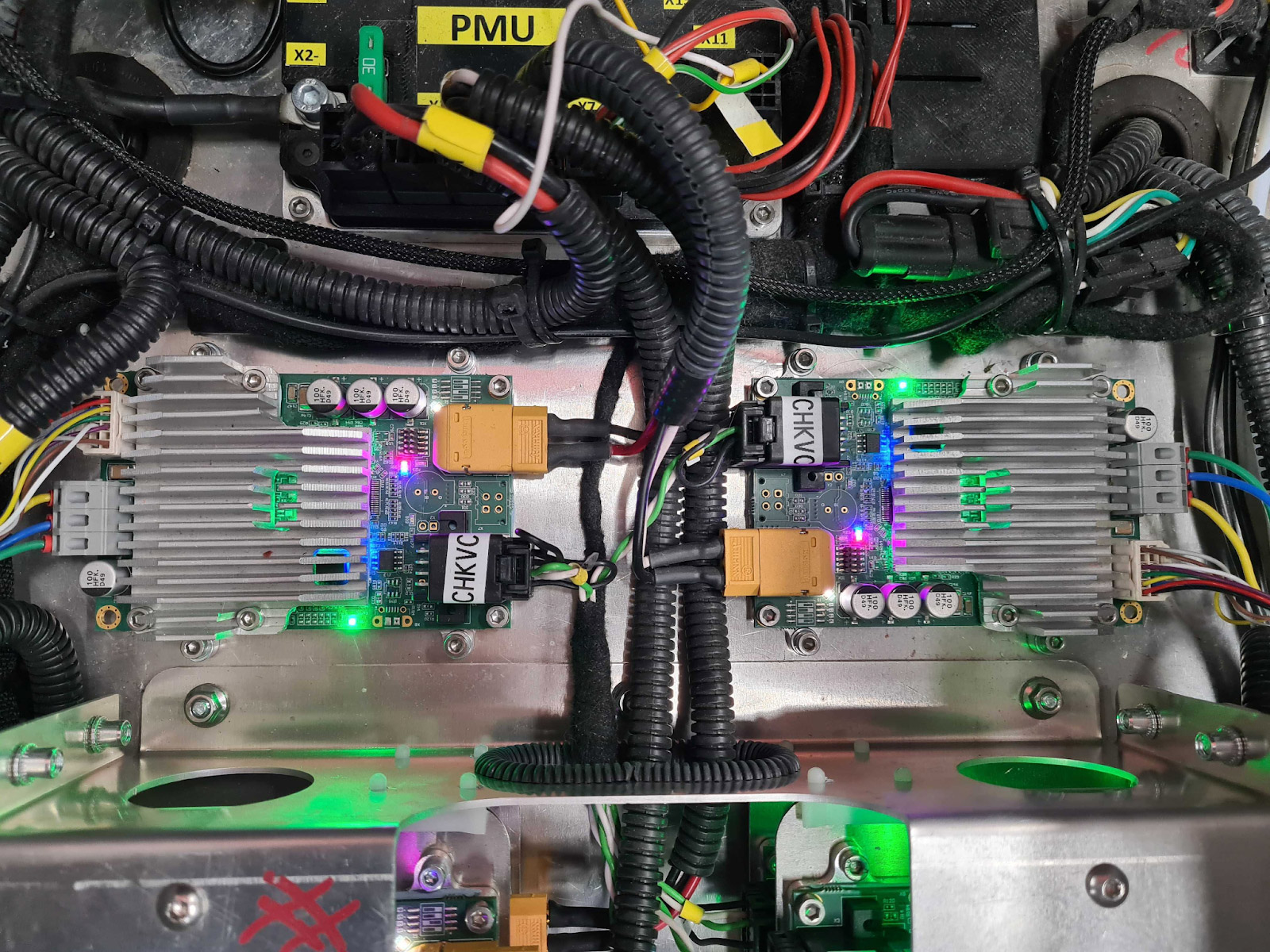
MotorControl и PMU под корзиной робота
Колёса
Для первых поколений роботов мы использовали мотор-колёса от гироскутеров. Которые в один не очень прекрасный момент закончились. Их перестали производить, а мы выгребли все остатки в Москве. Мы пытались выйти на фабрику, которая их производит. Натыкались на партии колёс с совершенно разными характеристиками, хотя при продаже характеристики были указаны одинаковые. У нас была табличка с 10 видами колёс, в которой было описано, как их идентифицировать и насколько они хороши. Дополнительной проблемой оказалось, что на робота нельзя было поставить колёса разного типа справа и слева, или слабые колёса на среднюю ось. В результате операция по замене колеса превращалась в раскладывание пасьянсов.
Кроме этого, колёса, предназначенные для гироскутеров, имели неудобный для нас способ крепления. Чтобы поменять колесо на первой модели робота, нужно было разобрать часть подвески. Ещё в мокрую погоду колёса начали выходить из строя из-за недостаточной влагоизоляции.
По этим причинам мы приняли решение не использовать мотор-колёса в R2, а унести моторы внутрь робота, передавая крутящий момент с помощью системы шкивов и ремней. Было закуплено около десятка моделей моторов разного типа. Мы спроектировали и изготовили несколько прототипов с таким приводом. Испытания показали, что хоть некоторые моторы и могут обеспечить нам езду по ровной поверхности, мы перестаём преодолевать препятствия, разворачиваться на покрытиях с большим коэффициентом трения, а моторы, расположенные внутри корпуса, перегреваются. В итоге пришлось отказаться от этой схемы: более моментные моторы были тяжёлыми, габаритными и дорогими, а варианты с редуктором имели меньшую надёжность, высокую стоимость и уровень шума.

Качалка подвески с ременной трансмиссией
Параллельно мы искали хорошие мотор-колёса, и в итоге вышли на поставщика хороших, стабильных и герметичных, с удобным способом крепления. Мы протестировали новые колёса и сделали выбор в их пользу. А потом оперативно переделали робота под мотор-колёса (мы держали в голове, что такой сценарий возможен и проектировали с его учётом). Этими колёсами пользуемся до сих пор.
Электроника
Специально под R2 мы разработали собственную материнскую плату для вычислителя. На ней разместили Ethernet-роутер, Wi-Fi и LTE-модемы, платы ввода видеопотоков, GNSS-модуль. Таким образом мы избавились от громоздких роутера, GeoHub и коммуникационных модулей, сократили количество межблочных соединений и уменьшили энергопотребление, выиграв ещё три часа работы от батарейки.

Материнская плата вычислителя робота
Сенсоры
Мы перешли на собственные камеры, разработанные ещё для беспилотника. Они обладают всеми необходимыми параметрами: компактные, могут работать в сложных погодных условиях, имеют высокое качество картинки. К тому же сенсор в наших камерах позволяет убрать мигание светодиодов на видео, что важно для правильной детекции сигналов светофора при пересечении дороги. И при этом они обходятся нам дешевле аналогичных камер на рынке.

Камеры SDG
Вместо покупных парктроников мы разработали собственные ультразвуковые сенсоры. Покупные периодически ломались, и будучи для нас чёрным ящиком, не позволяли системно разобраться в проблеме. В итоге у нас получились сенсоры, с которых можно получать не только расстояние до ближайшего предмета (один float), но и целую эхограмму. Теперь у нас появилась возможность посмотреть на данные и настроить пороги срабатывания для разных погодных условий и дорожных покрытий.

Парктроники SDG

Эходамп с парктроника
Мы добавили ещё один парктроник в переднюю часть робота, чтобы получилась вертикальная стереопара, позволяющая получать больше информации о препятствиях. И два парктроника в заднюю часть, чтобы предупреждать столкновения при движении задним ходом.
Итоги
Роботов модели R2 мы собрали около 100 штук. Сейчас они работают во всех локациях, включая США.

R2 выполняет заказ в США
R3: робот, который всё видит
Основной задачей этого поколения было научиться лучше видеть мелкие предметы перед собой. Кроме того, мы хотели научиться заезжать на высокие бордюры, лучше ездить по бездорожью, снегу, лужам, в разных погодных условиях. Мы также спроектировали батарею, которую можно заменить прямо во время работы робота. Это позволяет уменьшить время простоя робота на зарядке.
Что у робота внутри

Структурная схема R3. Зелёным цветом показаны компоненты, которые мы разработали сами
Электронная начинка робота состоит из модулей вычислителя (CarrierBoard), контроллера платформы (PlatformControl), контроллера периферии (BodyControl) и трёх контроллеров колёс (MotorControl).
CarrierBoard — это «мозг» робота. С помощью алгоритмов, которые на нём запущены, робот распознаёт людей, машины и препятствия, планирует траекторию движения и локализуется в пространстве. На плате вычислителя расположен роутер, через который все компоненты связаны в единую бортовую сеть. Видеопотоки с камер тоже попадают напрямую в вычислитель.
PlatformControl отвечает за питание платформы, управляет ограничениями токов на каждой ветке питания, переключает питание на резервную батарею, когда основную вынимают. Также он формирует команды управления колёсами и собирает данные с ультразвуковых сенсоров. MotorControl получают от PlatformControl задание скорости для каждого колеса и управляют токами в обмотках так, чтобы обеспечить заданную скорость в разных условиях движения. BodyControl отвечает за управление мотором крышки, замком и бортовым светом.
Все электронные компоненты расположены внутри герметичных корпусов.

3D-модель MotorControl в герметичном корпусе
Бóльшая часть корпуса робота выполнена из деталей, изготовленных из стеклопластика. Несущей основой робота являются поддон и корзина. На них навешивается всё остальное: подвеска, кронштейны сенсоров и электронных модулей, внешние панели. Доступ к электронике можно получить после съёма соответствующей панели. Сенсоры при этом остаются на грузовой корзине и не требуют перекалибровки после ремонта.
Из-за того, что мы перенесли лидар вперёд, мы не смогли двигаться итеративно и сделать нового робота на таком же шасси, как у предыдущего поколения. Нельзя просто развернуть корпус робота задом наперёд, это потянуло за собой полную перекомпоновку и переработку конструкции. Зато в процессе мы избавились от монококовой конструкции корпуса и от алюминиевой рамы шасси. Это облегчило изготовление деталей и упростило обслуживание робота.

Сборка роботов поколения R3 в нашем инженерном центре
Сенсоры
Мы изменили модель лидара. С момента создания предыдущего поколения команда локализации научилась лучше использовать ориентиры, и мы смогли перейти на лидар, который видит не так далеко, зато имеет более широкий угол зрения и 64 луча вместо 16. Поэтому мы смогли разместить его в передней части робота и слегка наклонить вперёд. Таким образом мы значительно увеличили детализацию окружающих объектов в лидарном облаке.

Поиск баланса между высотой отсека и углом обзора лидара
Мы изменили объективы камер, теперь это фишай-линзы с углом зрения больше 180 градусов. В камеру, установленную на роботе, теперь видно кусочек самого робота. Чтобы хорошо видеть светофоры на противоположной стороне широких улиц, мы добавили одну фронтальную камеру с длиннофокусным объективом.
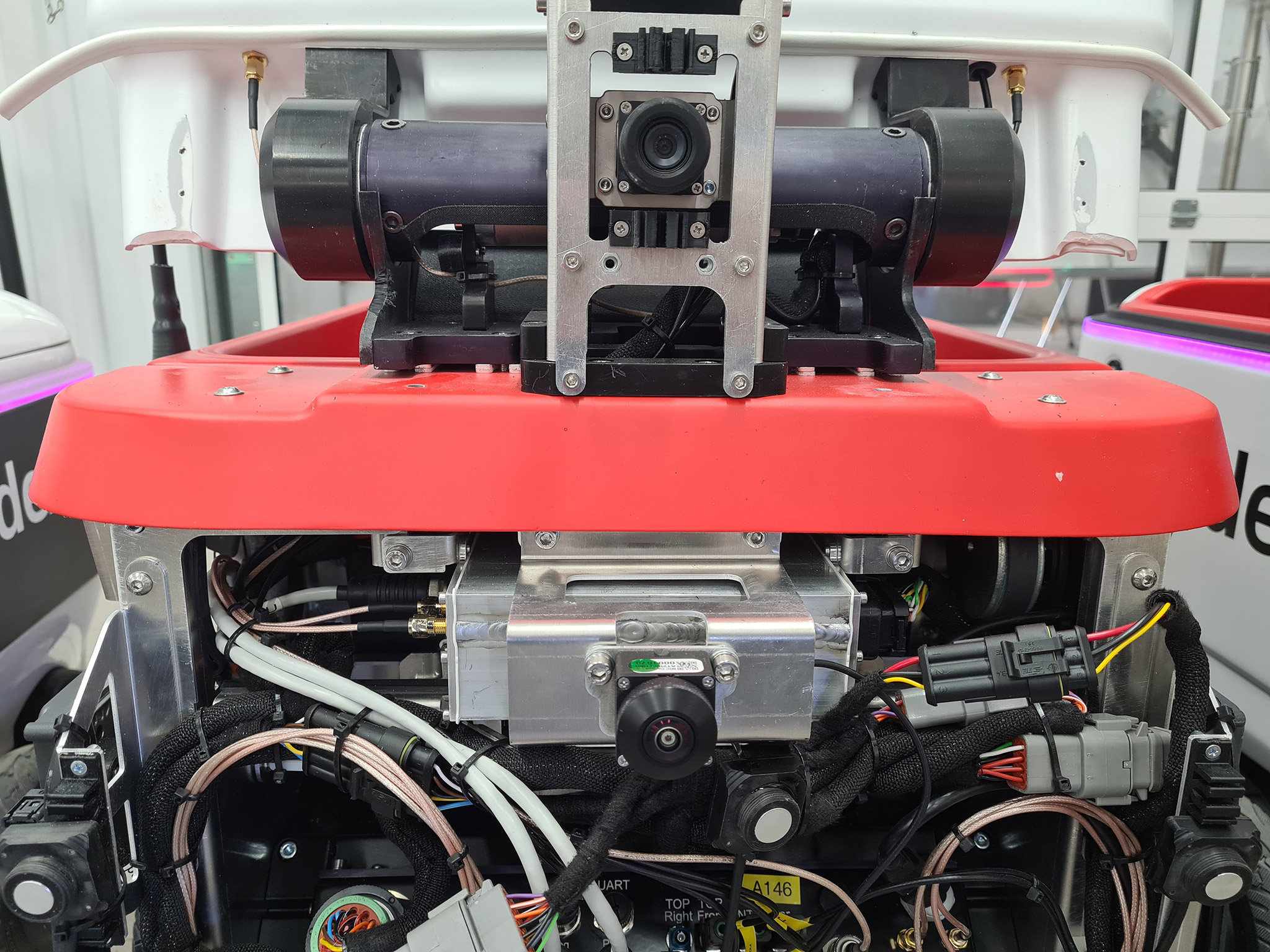
R3, вид спереди. Камеры закреплены на раме робота: так калибровки не страдают, когда панели корпуса снимают для обслуживания
Подвеска
В R3 мы увеличили дорожный просвет и разработали собственную зимнюю резину с более агрессивным протектором и большей площадью контакта с поверхностью. В процессе отбора идей обсуждались и более радикальные решения вопроса зимней проходимости, но было важно соблюсти баланс: всё-таки большую часть времени робот ездит по очищенным тротуарам. Платформа была готова к тестам летом, в самую жару, поэтому для тестов мы использовали ванну с искусственным снегом (полиакрилат натрия). Тесты показали, что R3 лучше справляется со снежной кашей, чем его предшественник. Зиму в этом году снова обещают снежную, а значит, у нас будет отличная возможность протестировать это и в реальных условиях.
R2 не проезжает тестовую ванну со «снегом»:
 R3 проезжает тестовую ванну со «снегом»:R3 едет по снегу в Иннополисе:Добавила проходимости рессорная подвеска каждой оси. Раньше подвеска была жёсткой, и мы получали высокий уровень шума на трещинах в асфальте, плитке, брусчатке, а особенно при съездах с бордюров. Чтобы протестировать и обкатать новую подвеску, мы спроектировали её прототип для поколения R2 и оборудовали несколько роботов опытными образцами. Роботов испытывали на шейкере, имитирующем езду по неровной дороге, на тестовом полигоне и на самом бугристом из наших продакшн маршрутов.
R3 проезжает тестовую ванну со «снегом»:R3 едет по снегу в Иннополисе:Добавила проходимости рессорная подвеска каждой оси. Раньше подвеска была жёсткой, и мы получали высокий уровень шума на трещинах в асфальте, плитке, брусчатке, а особенно при съездах с бордюров. Чтобы протестировать и обкатать новую подвеску, мы спроектировали её прототип для поколения R2 и оборудовали несколько роботов опытными образцами. Роботов испытывали на шейкере, имитирующем езду по неровной дороге, на тестовом полигоне и на самом бугристом из наших продакшн маршрутов. 
Так мы убедились, что карбоновые рессоры выдерживают нагрузку и нашли несколько недочётов, которые удалось исправить до запуска этой подвески на R3.
Вот как робот переезжает тестовое препятствие (скоростная съёмка на айфон):
Крышка
В этой версии робота мы переработали механизм закрытия крышки. Мы сделали его более надёжным, интегрировав петлю прямо в крышку (раньше она крепилась к корпусу кронштейнами). Также мы изменили тип двигателя. Это позволяет нам чувствовать намерение пользователя захлопнуть крышку рукой и реагировать на это штатным закрытием. Крышка также чувствует, если под неё попал посторонний предмет, и открывается обратно, как лифт. Её можно закрыть кнопкой, руками или из приложения:
Итоги
Суммарно три поколения роботов уже доставили 60 тысяч заказов. Сборка третьего поколения идёт полным ходом — каждый день появляются новые R3. Например, робот номер 126 штурмует сугробы Иннополиса.

А его товарищ номер 127 в это время любуется на кактусы и пальмы Аризоны. В Москве с R3 можно познакомиться в Хамовниках.

Будут ли новые итерации роботов? Вполне возможно. Мы постоянно анализируем удобство нашего сервиса рободоставки для пользователей и смотрим, что можно улучшить по части железа. Софт постоянно совершенствуется, и каким-то новым фичам может потребоваться хардварная поддержка. С выходом третьего поколения работа не заканчивается, а только начинается.

Комментарии (250)

kablag
25.11.2021 10:29+26мы нашли, где заказать хорошие батареи, но не расскажем...
мы нашли, где заказать хорошие колёса, но не расскажем...

lab412
25.11.2021 11:04-12еще надо добавить: "мы сделали робота, но не покажем"
я живу в Москве и впервые услышал и увидел это сейчас тут на картинках. Если фото в статье посмотреть так эти штуки катаются по всему городу и развозят всякое. Вот машины я вижу, их тестируют в моем районе и это приносит кучу проблем и порой именно Я-машины создают пробки и всякие проблемы. Но где роботы? по офису ездят и лишь для фотосессий выходят на улицу раз в 7 лет?Как говорил классик: "- А был ли мальчик?" (Максим Горький - «Жизнь Клима Самгина»)

BarakAdama
25.11.2021 11:20+12Просто процитирую тут пост :)
В Москве с R3 можно познакомиться в Хамовниках.

Goupil
25.11.2021 11:38-19Видел я этого робота в Хамовниках, а еще там видел беспилотный автомобиль яндекса, правда с пилотом. Выглядит забавно, но прорывными технологиями не получается назвать - яндекс просто берет чужие технологии и применяет их в России, за счет своего положения не давая места заграничным игрокам. Тем более учитывая наши реалии за пределами Москвы и МО робокурьер пропадет в первую же поездку.

SergeyNovak
25.11.2021 12:00+19Расскажите подробней тем, кто не в курсе какие технологии применяет Яндекс и какон не дает места другим?
Goupil
25.11.2021 12:11-13То есть железо, архитектуры, в том числе нейросетей, системы связи в этих штуках, даже сам авто - отечественные?
SergeyNovak
25.11.2021 13:54+20Окей, так и записываем: чтобы не оскорбить патриотов, любые разработки в РФ должны начинаться с разработки собственной архитектуры, потом своего процессора, систем связи и лишь только потом скрипт на питоне.
Но как Яндекс не дает места другим? И не совсем понятно, он не дает места в РФ или в Иннополисе?
Am0ralist
25.11.2021 14:33+18чтобы не оскорбить патриотов
причём тут патриоты, когда это «методичка» разоблачений под любой статьёй о том, что то или иное сделано у нас.
Яндекс серверы у нас производить начал? Да они просто сборщики
ПрогрессПро бд продают — да они просто обои нескучные на опенсорс решение прикрутили.
Раз за разом. Тут прям открываешь любую тему и наблюдаешь.
И это не «патриоты», это борцы с «отечественным».

order227
25.11.2021 14:05+11То есть железо, архитектуры
"Выглядит забавно, но прорывными технологиями не получается назвать - Google/etc просто берет чужие технологии и применяет их по всему миру за счет своего положения не давая места заграничным игрокам. Своей архитектуры не разработали, завод по производству процессоров не построили" © Альберт Энштейн

trenkvaz
25.11.2021 19:47+4А в какой стране все отечественное в этой сфере ? Взять какой-нибудь американский аналог.Так там будут применены технологии Западной Европы, Японии, а микросхемы произведены в Китае.
Про какие чужие технологии ты говоришь ?
Беспилотные машины начали использовать во Вторую Мировую войну.По-твоей логике все компании мира, кто сейчас это использует своровали их ?

Direvius Автор
25.11.2021 12:12+6В Москве есть несколько районов, где мы уже осуществляем доставку еды и посылок для Почты России. Вот например карта из описания проекта с сайта Почты:


onyxmaster
25.11.2021 15:18+1Возле "Галереи Аэропорт" видел R2 некоторое время назад, ехал по делам =)

telefonist
03.12.2021 11:13Ох, не люблю придираться к мелочам, но какие же это Фили? Этот район называется Давыдково. Там скоро даже метро откроют с таким названием. А до Филей оттуда четыре километра по прямой.

PanDubls
25.11.2021 12:39+6Видел такого месяц назад, деловито куда-то ехал мимо Усачёвского рынка, фотографа с камерой рядом видно не было. Впечатление производит прелестное.

blaze79
26.11.2021 21:54+4я думаю, что в москве есть много людей, которые вас никогда не видели. а был ли мальчик?

Wesha
26.11.2021 05:01+1мы нашли, где заказать хорошие батареи, но не расскажем...
мы нашли, где заказать хорошие колёса, но не расскажем...Аквалангистыяндекс-роботы — это не игра!



TheRaven
25.11.2021 10:43+1И когда сия чудова машинерия покатится до дорогам нашей страны?
Direvius Автор
25.11.2021 13:05+4а из какой вы страны?
TheRaven
25.11.2021 13:07+13А из России. Москва, как известно, не совсем РФ, а Иннополис это вообще заповедник. Когда реальная эксплуатация будет?

Color
26.11.2021 11:04+2Россия - нецелевая аудитория для таких технологий

MIKEk8
27.11.2021 05:12+1На самом деле вне крупных городов - это будет замечательно. Ведь в городах доставка до квартиры, а в посёлках до дома. И расстояние в посёлках куда больше, что для людей проблема, а для роботов - нет
Color
28.11.2021 21:56+3Ну как сказать. В поселках обычно такие дороги, где пешком пройти можно, на внедорожнике как-то проедешь, а вот чтобы ровер с малюсеньким просветом там прошел - верится примерно никак.

YNK
30.11.2021 14:44+1Так вы натолкнете их на идею составить конкуренцию Минтрансу и начать прокладывать Яндекс-дороги для своих роверов по нашим городам и весям.
Color
30.11.2021 18:24Почему нет? Почту как один из государствообразующих сервисов уже успешно заменили в части доставок посылок и грузов (а письма никто не шлет). В целом нормальный процесс, что в условиях свободной экономики частные бизнесы заполняют государственные ниши, где не справляется государство. Тот же общественный транспорт во многих городах не муниципальный, а частный - при этом инфраструктура в отличном состоянии.
Am0ralist
01.12.2021 13:18уже успешно заменили в части доставок посылок и грузов
но только лишь в части и не по всей стране?
То бишь исключительно на коммерчески выгодных направлениях.
То бишь, не почту (государственнообразующий сервис) заменили, а всего лишь предложили более удобные способы доставки грузов на части направлений.
Это как раз пример того, что это бизнес не сможет справится с задачами, которые решает государство.Color
01.12.2021 16:15С одной стороны да (в случае с почтой) с другой - хорошие дороги у нас тоже только в коммерчески выгодных направлениях есть.
Am0ralist
01.12.2021 17:50Хорошие дороги у нас есть и не только на платниках.
Дороги в общем тоже сеть разветвлённая. А коммерческая доставка в условный устьзажопинск может отсутствовать как факт вообще. Только хоть какая-то почта. Либо стоить столько, что коммерчески неокупабельно.
Color
02.12.2021 12:56Я с этим не спорю. Говорю лишь о том, что существуют примеры замещения ниш, с которыми не справляются государственные структуры, частными компаниями.
Замещают ли они на 100% - очевидно, нет.
Могу ли я отправить посылку из Воронежа во Владивосток вдвое дешевле и втрое быстрее, чем раньше - да, могу.
Am0ralist
02.12.2021 14:29Ну тут больше про то, что государство обеспечивает базовые решения, оставляя экономически выгодные на откуп коммерции в надежде, что это, во-первых, будет решено оптимальнее, во-вторых налоги и экономическая деятельность будут расти.
Поэтому, повторюсь, пример — не замещения нишы. Замещения не произошло. А расширение нишы больше базовой.вдвое дешевле и втрое быстрее, чем раньше — да, могу.
Но это не факт. В том числе, что заказ так же не продолбают. СДЭК — продолбаем всё! Да и цены за быстрее обычно не дешевле в большинстве случаев.
Color
02.12.2021 17:22Я скорее про сервисы постоматов, а-ля боксберри и сберлогистики. Они реально быстрые и довольно надежные. СДЭК - это больше b2b, и масштабы другие. Но в целом меня его качество устраивает, как минимум по сравнению с почтой.

Lennonenko
02.12.2021 16:12+2бизнес может справиться со всеми теми же задачами, что и государство
но не хочет, и не захочет никогда, потому что в противном случае он перестанет быть бизнесом

sergeyns
25.11.2021 18:00+1Хуже, по тротуарам она покатится

Areso
27.11.2021 00:25Выбирая между сотнями тысяч азиатских, плохо говорящих на русском языке, курьеров и роботами, я выберу роботов.
Банально, но робот найдет меня быстрее. Или я - робота

vilky
27.11.2021 11:15-7Дожили: спамбот, не понимающий комментарий, на который он отвечает, морщит носик по поводу того, как разговаривают люди.
Areso
27.11.2021 13:59+2Я ответил ровно в силу своего понимания. Человек не хочет делить тротуары с этими роботами, а я не хочу делить тротуары с курьерами, которые пугают людей, не ограничены скоростью в 8 км/ч, и, наконец, не могут понять получателя, и потому не могут его найти.
vilky
27.11.2021 11:20Вот да, и хотелось в статье увидеть какую-то рефлексию на эту тему. Не только гордость по поводу того, как грузовичок лавирует в толпе. Может, его на манёвры не между пешеходами надо науськивать, а между автотранспортом? или между велосипедами и электросамокатами?




divanus
25.11.2021 11:04+17Я бы штук пять взял в эксплуатацию в свою деревню сейчас таких ботов. Яндекс интересно, даст их потестить в живых условиях глубинки? Сам собирал робота доставщика году в 2006-м проживая еще в саратовской губернии (управление по радиоканалам через сеть цифровых ретрансляторов на 430 мгц, АХ.25 1200 бод. Основа картирования ГИС РУССА - кто помнит была такая программа и карты к ней. На борту КПК HP под WinCE. Проблем было куча. Поэтому карта разделялась на квадраты. Далее все было по принципу: едешь по программе. Останавливаешься по срабатыванию ИК. ). Бросил этим заниматься за отсутствием в то время денег и интереса у всех к ИТ в принципе да и знаний не хватало и в одну репу делать - неблагодарное занятие.
Direvius Автор
25.11.2021 11:06+10кажется могла бы получиться неплохая статья ;) интересно поподробнее узнать про вашего робота
divanus
25.11.2021 12:12+16Статьи у меня не получаются.
И так, кратко:
Корпус из фанеры тонкой, влагостойкой.
Колеса - 4 шт. По автомобильному принципу. Приводов 2 - по одному на каждую сторону. Взяты с разборки авиационной техники (видимо отвечали за какие-то механизмы).
Ременная передача (подошел первый попавшийся ремень от ваза).
Колеса - нашел какие-то резиновые.
КПК HP, модель уже не припомню честное слово.
Приложение под WinCE самописное - помогал товарищ.
Датчики парктроника, найденные на развале сенного рынка саратова.
Логика работы была следующая:
Бралась карта гисс русса, делилась на квадраты (по принципу радиолюбительскому квадратов, только меньших - то же кодирование .KP50VAabcde).
Робот запускался по маршруту "шагами" по данным квадратам. Препятствие от парктроника.
Провозились мы пол года примерно. Столкнулись с проблемами: робот врезался в препятствия. Уходил куда-то не туда во дворе. Адрес кстати езды был: г. Энгельс, М. Василевского. Там пытались.
Два раза нам его ломали прохожие взрослые люди. Один раз на нас напали и пытались избить и отнять. В итоге мы бросили со знакомым это занятие )
Вот и вся история.
divanus
25.11.2021 12:16+1Во время переезда из саратовской области в Питер летом 2008 у меня HDD 80 Gb убился. Восстановить ничего с него не получилось, поэтому у меня отсутствует архив фотографий периода 1999-2008 *сканированные и от первой мыльницы*. А DVD-RW диск я так и не нашел, скорее всего остался в бывшей уже квартире, когда родители переезжали в 2014-м. Там для меня более важным были аппаратные журналы по моему хобби, а так же несколько фотографий ценных (((
Direvius Автор
25.11.2021 12:20то есть вы по GPS ездили? а двигатели какие были? Может фотки остались? )
divanus
25.11.2021 12:23+1двигатели с какого-то механизма из советской авиации 12/24В обмотки.
АКБ из распотрешенного АРС. Хватало минут на 10.
GPS цеплялся по СОМ-порту к КПК. По сути навигация и канал управления - это технология протокола APRS.
divanus
25.11.2021 12:27+1Ан нет. Сидел вспоминал. GPS у меня был с Bluetooth. Где-то даже до сих пор валяется в коробке сам GPS. И к КПК он по нему цеплялся.
Direvius Автор
25.11.2021 12:59+4Интересно. Жалко, что интересные начинания разбиваются о такие вещи =(
Два раза нам его ломали прохожие взрослые люди. Один раз на нас напали и пытались избить и отнять
divanus
25.11.2021 13:25+5Вспомнился анекдот старый:
- Прошу прощения за беспокойство, но я выхожу на
следующей остановке. Будьте любезны, позвольте пройти...
- Ну, ты интеллигент сраный, что ли?
- Отнюдь нет. Такое же быдло, как и Вы.

diogen4212
25.11.2021 11:51+2Когда в Мурино вернётесь? Катались R2 пару месяцев этим летом, сперва сами по себе, потом в сопровождении живых людей, в приложении можно было доставку роботом заказать, перед знакомыми хвастаться видосиками, но потом все внезапно исчезли.

CrashLogger
25.11.2021 16:40Сначала придется их пулеметными турелями оснастить и бронированный корпус разработать )
diogen4212
25.11.2021 17:12да нормально там! даже в этой статье красивую фоточку с улицы Шувалова вставили))
Кстати, лидар впереди на последнем роботе реально на турель похож...


freestyler8
25.11.2021 12:54+7Клевая штука, еще когда они в Мурино ездили было прикольно посмотреть. Но не ясен правовой статус этих роботов. Если его машина собьет, когда он проезжую часть переезжает, кто будет виноват? Яндекс? По ПДД водитель обязан пропустить только пешеходов, т.е. робота пропускать не обязан.
Areso
25.11.2021 17:20+6Проблема актуальная.
На Ваше обращение, поступившее в Управление Государственной инспекции
безопасности дорожного движения Главного управления Министерства внутренних
дел Российской Федерации по Свердловской области1, по вопросу движения по
нерегулируемому пешеходному переходу автономных и/или дистанционно
управляемых роботов – доставщиков, сообщаю, что УГИБДД МВД России по
Свердловской области не предоставлено право официального толкования
законодательных и иных нормативных правовых актов, а также практики их
правоприменения.
Вместе с тем считаю возможным по поставленному в обращении вопросу
сообщить следующее.
Согласно пункту 14.1 Правил дорожного движения Российской Федерации,
утвержденных Постановлением Совета Министров Правительства Российской
Федерации от 23.10.1993г. No 10902, водитель транспортного средства,
приближающегося к нерегулируемому пешеходному переходу, обязан уступить дорогу
пешеходам, переходящим дорогу или вступившим на проезжую часть (трамвайные
пути) для осуществления перехода.
Понятие «Пешеход» закреплено в пункте 1.2 ПДД РФ, согласно которому
пешеход – это лицо, находящееся вне транспортного средства на дороге либо на
пешеходной или велопешеходной дорожке и не производящее на них работу. К
пешеходам приравниваются лица, передвигающиеся в инвалидных колясках, ведущие
велосипед, мопед, мотоцикл, везущие санки, тележку, детскую или инвалидную
коляску, а также использующие для передвижения роликовые коньки, самокаты и
иные аналогичные средства.
Учитывая, что обозначенное в обращении самоходное устройство невозможно
соотнести с закрепленным в ПДД РФ понятием пешеход, то и положения ПДД РФ,
касающиеся пешеходов, не могут быть применимы к данным устройствам.Это официальный ответ на мой вопрос, считаются ли роботы пешеходами и могут ли они пользоваться нерегулируемыми пешеходными переходами.

czz
25.11.2021 18:03Водитель, тем не менее, обязан не создавать аварийную ситуацию.

alexzeed
25.11.2021 20:30+3Так в этом и вопрос, если робот выкатится на нерегулируемый переход и подставится под бампер машины, кто будет создавшим аварийную ситуацию? По идее, робот. Пока не будет изменений в ПДД, безопасно роботы могут пересекать дороги только на светофорах. И то под вопросом. Есть же поворачивающие авто.
czz
25.11.2021 20:41+3Наверное, ПДД не обязывают это делать — но по здравому смыслу водитель перед переходом должен снизить скорость до такой, которая позволяет реагировать на внештатные ситуации. Также ему не стоит начинать или продолжать движение, если перекрыт обзор. То есть, если водитель на переходе сбил робота, двигающегося небыстро и по предсказуемой траектории — значит, он бы и пешехода на этом месте сбил. То есть, налицо манера вождения, провоцирующая опасную ситуацию.

philya
01.12.2021 01:02+1В этом году в Иннополисе такой робот смело кинулся мне под колеса. На дороге мой автомобиль был единственным. Пешеходный переход был нерегулируемым. Тормозил я активно и почти в пол. Почему я должен пропускать тележку с колесами на пешеходном переходе - я не понял, списал на особенности Иннополиса )
У робота есть проблема - он низкий и я на него даже внимания не обратил. Ну ящик у дороги и ящик....
iMoHax
26.11.2021 18:24+1Ну собаки быстро научились переходить только тогда, когда люди переходят, вот и роботов также надо научить
Areso
27.11.2021 00:23+2Собаки умеют переходить на зелёный или по нерегулироуемому пешеходному переходу, хотя во втором случае риски повышаются. Потому что собака это не лицо... Даже несмотря на то, что она на зебре. Многие пропускают, из уважения к интеллекту хвостатых, но видел и обратные случаи, к сожалению.


Akr0n
25.11.2021 13:12В итоге, робот использует заранее записанную 3Д-карту района для ориентирования через лидар или он может свободно доехать до нужных координат в любом месте?
Direvius Автор
25.11.2021 13:17+1заранее записанную
Akr0n
25.11.2021 13:41Но ведь тротуар гораздо более динамично меняющееся пространство чем автомобильная улица, как это решается?
Direvius Автор
25.11.2021 14:05+16сохраненная карта нужна для локализации: робот сканирует пространство с помощью лидара и сопоставляет полученное облако точек с картой в памяти. В том же облаке точек есть объекты, которых в карте нет, в том числе динамические. Их робот идентифицирует с помощью нейросетевых алгоритмов и строит траектории с учетом всех участников движения и статических объектов. Например, в этом видео в карте нет бордюров, скейтов и мячика, но робот их успешно объезжает:
https://www.youtube.com/watch?v=nuAgOsDGF3g
Для движущихся объектов также строятся предсказания траекторий и робот учитывает их в планировании.
И да, навигация в толпе это не то же самое, что навигация на дороге. Там ребята из команд behavior и perception много труда вложили. Надеюсь, тоже расскажут когда-нибудь на хабре поподробнее.

gapel
25.11.2021 13:42+3круто! молодцы!
Есть ряд вопросов, которые бы дополнили картину.
А что за процессор в результате? Больше железных подробностей!
Экономика проекта. Сколько сейчас получается стоимость одного доставщика? А купить можно будет? Или только заказывать сервис?
Лидар. Я уже не первый раз встречаю и меня мучает вопрос про тех характеристики и самое главное стоимость и возможность купить
Радары. На самом деле у вас я так понимаю допплеровские CW стоят. Дешево, но в целом они зачем? Робот видит, что приближается машина и ускоряется (что не добавит безопасности) или останавливается (тоже сомнительное решение) Или чтобы были на будущее?
Direvius Автор
25.11.2021 14:21+4я, к сожалению, не могу подробно ответить про модели, поставщиков, экономику и бизнес-модели — NDA. Если правда купить хотите — могу связать с нашим отделом по развитию бизнеса =) На остальные вопросы попробую ответить, не вдаваясь в детали (к сожалению).
Лидар средней дальности с большим (90+) вертикальным углом обзора. Таких на рынке немного, обычно такие ставят как боковые на больших беспилотниках. Тут нужно идти от конкретной задачи, для indoor применения например другие были бы лидары. Стоимость зависит от числа лучей, однолучевые для DIY можно найти тысяч от 10 рублей, например. У нас 64 луча сейчас и наружное применение.
Радары нужны, чтобы дождаться, когда будет безопасно проезжать перекресток. Когда мы уже выехали на перекресток, останавливаться, доезжать, ускоряться, замедляться — это ответственность команды behaviour, решение зависит от многих факторов. Мы предсказываем траектории участников движения, радар это просто один из сенсоров, который дает дополнительную информацию и улучшает предсказания. В целом мы стараемся быть заметными и предсказуемыми.


mixsture
25.11.2021 14:26+5А что в этом роботе предусмотрено от банального его воровства с распродажей на детали?
Direvius Автор
25.11.2021 14:59+7Робот весит 70 кг и увешан сенсорами. Просто так его не утащить. Грузовой отсек тоже непросто открыть. За наши 60000 заказов пока таких попыток не было. Да там и распродавать то особо нечего, мы же все сами разработали, это нигде не применишь без нашего софта.

NikitchenkoSergey
25.11.2021 17:57+4А есть встроенный громкоговоритель, чтобы отгонять злоумышленников сиреной и угрозами расправы? :)
Мне кажется, как только история станет массовой — всякие пьяные школьники начнут нападать на роботов. Если даже самокаты умудряются вандалить.
vakhramov
25.11.2021 21:50управление bldc типовое, odrive напоминает, большие резисторы вместо датчиков тока...
что могло бы пойти в дело) : движки, модули управления ими (там же видно какая нога мк куда ведет), куча сенсоров со стандартными интерфейсами, банки аккумуляторные....ну и в конце-концов должен же быть жизненный цикл у них)) У каждого компонента свой срок службы. В случае бОльшей модульности при разных сроках службы каждый компонент мог бы быть применен в каких-то еще аппликейшнах, подумайте об этом при масштабировании какого-нибудь r4.
Кстати, как отслеживаете износ подшипников колес? Выдерживает ли контроллер замыкания всякие, итд?
Думается - мотор-колёса составляют существенную стоимость изделия, было бы здорово и их локализовать, помимо сенсоров.
PS: а в регионах тем временем буксуют проекты автоматизированных складов...
Direvius Автор
26.11.2021 00:31я имею в виду, пусть есть гипотетическая "разборка" робота. Зачем мне покупать проприетарную железку с надписью Yandex на разборке, заточенную под робота, реверс инжинирить ее, писать софт, и ставить к себе куда-то, когда я могу за 5 тысяч рублей примерно такую же по функциональности купить на алиэкспрессе? А рынок лидаров настолько мал, что все будут знать, откуда вы его взяли, поэтому на "разборку" вы тоже не пойдете его покупать. Ну аккумы может быть — но там их не так много, чтобы из за этого рисковать.
Переиспользовать внутри Яндекса можно, потому что у нас вся экспертиза по модулям внутри. Что-то поменять под задачу можно очень быстро.
С износом подшипников за 2 года не сталкивались, сталкивались с износом шин. Сейчас просто по внешнему виду — меняем. Алгоритмы локализации достаточно устойчивы, чтобы не ломаться при изменении диаметра из за износа.Контроллер выдерживает замыкания и вообще умный. Температуру колеса может отслеживать, ограничивать нагрузку, и тд.
мотор-колёса составляют существенную стоимость изделия
на самом деле нет, не очень. Кажется, что за такие деньги никакой локальный производитель не возьмется их делать (мы ходили узнавали). Это стандартное массовое изделие, с ним сложно конкурировать.
в регионах тем временем буксуют проекты автоматизированных складов...
вы про какие-то конкретные проекты? Задача автоматизации складов не очень ложится в беспилотники. Разные окружения, разные приоритеты в требованиях к платформе и софту. Проекты робота-доставщика и беспилотного такси приносят пользу друг другу.
vakhramov
26.11.2021 01:08Окружение на складах попроще, конечно. Я не про автоматизированные крановые системы, а про роботизированные тележки. В целом платформа отличается лишь инструментом на шасси. В случае с доставкой - это контейнер, в случае со складом - это место под контейнер.
Какой максимальный пробег из всех выпущенных единиц был достигнут?
Оценка износа шин происходит алгоритмически, или пока единиц техники мало - человеком?
Лидар уедет в поля, помогать пахать, сеять, жуков собирать)) Железки заточены под задачу, а задача - перемещать шасси, несмотря на надпись)
Кстати - мы используем стереозрение + знание об окружающем мире для ориентации, и этого хватает (есть один баг, с предметам, одинаково выглядящими с разных ракурсов, я так себе нос сломал о натянутый тросик в детстве). Далека ли инженерная начинка от решения задачи ориентации без лидаров? Вроде нейросети, которая будет обучена не только типам предметов, но и их размерам, и относительным сравнениям размеров.
Direvius Автор
26.11.2021 07:54В целом платформа отличается лишь инструментом на шасси.
на складах идеально ровный бетонный пол. Там выгоднее иметь (кажется, так то надо проверять) два ведущих колеса и два или четыре свободно катающихся. Другие по крайней мере так делают. Шины выгоднее иметь плоские и более жесткие.
Кроме этого, другой набор сенсоров и другая экономика (это влияет например на выбор размера батарейки и способ зарядки).
Далека ли инженерная начинка от решения задачи ориентации без лидаров?
Наши конкуренты используют стереозрение, мы умышленно выбрали путь с лидарами. Они дают много качественных данных, мы умеем с лидарами хорошо работать, а теперь умеем делать сами.
Оценка износа шин происходит алгоритмически, или пока единиц техники мало - человеком?
Пока что человеком.
vakhramov
26.11.2021 09:21+2Про другой пол и количество колёс в шасси согласен (как и темп.диапазон), но это детали, просто урезанный конфиг шасси.
Под "мы используем зрение" имел ввиду мешков с костями)
Про максимальный пробег всё же важная цифра. Лидар на массовом изделии не нравится концептуально, потому что он с механическими частями, и это одна из точек отказа, повышение maintenance costs. Всё равно буду болеть за наших, пусть и с лидаром :) В целом достаточно мощная для набортной задачи "камеры => объекты" вычислительная подсистема тоже косты пока повышает (ввиду её текущей дороговизны) но теоретически она будет снижаться, и мне видится перспективным вариантом обучение с лидарами, а затем переход на камеры, но я не изучал глубоко этот вопрос.
Кстати, лидары используются для контроля зон в промышленности, типа детектирования предметов в зоне робота, которых быть там не должно, итд. Погуглил про ваш, по температурам если его до 60 сделаете работоспособным, интерфейсы промышленные как опцию запилите, будете с sick конкурировать на рынке industrial.
Спасибо за ответы. Масштабируйтесь поскорее.
Direvius Автор
26.11.2021 10:25Всё равно буду болеть за наших
спасибо за поддержку, это очень важно!
Am0ralist
26.11.2021 11:23Вот, если честно, с одной стороны яндекс — это вот такие проекты и респект за инженерные решения.
С другой — маркет, где вибраторы пихают в настольные игры «от 6 лет» и кладущая на всё техподдержка...

SamaRazor
26.11.2021 01:12Это все интересно, конечно, но пьяный Василий увидев такую штуку может прилично удивиться, и попытаться ее либо завандалить (а че это такое ваще делается), либо заиметь себе (а че это за прикольная штука, на дачу к себе увезу).
Заместо Василия подставьте Джона, да и вообще любого не очень смышленого человека.
cepera_ang
26.11.2021 07:41+1В тем же успехом, пьяный Вася может удивиться любому автомобилю, однако это не останавливает людей от их покупки и использования. А тут к тому же штука, которая налету собирает доказательную базу и может хоть стримить в реальном времени как Вася пытается её похитить. Пара таких Вась громко посаженых и Пети будут обходить за километр.
mixsture
26.11.2021 00:08velodyne lidar 64 — я так понял 64 луча и полный оборот — 75к уе. Ваш, наверно, поменьше стоит. Есть за 8к уе поменьше лучей и 90 градусов. Вобщем, штуки дорогущие. Даже не касаясь вашей особой электроники есть еще двигатели и аккум. Вполне универсальные вещи для барахолки.
Есть у меня ощущение, что у вас не было пока таких случаев потому, что люди не понимают пока начинки.
smoluks4096
26.11.2021 03:21А куда вы дома примените лидар и мощные blds колёса? Да и уровень подготовки оно требует повыше, чем ардуины
А лития китайского сейчас горы
vakhramov
26.11.2021 09:34+1Даже я, просто подумав, что гироскутер можно было бы использовать как платформу для робота, купив их 4 года назад парочку и скомпилировав с незначительными изменениями с github для китайского GD103 прошивку, смог ими вращать) Уровень подготовки - никакой, я вообще даже не программист и не схемотехник.
Думаю - там система управления не сильно схематически отличается от той, что в application notes для установленного на плату процессора.
Накрайняк можно к другим инверторам подцепить колёса.
Лития горы, хороших элементов - мало, и стоят они не копейки, сравнивая с зарплатами в регионах.
cepera_ang
26.11.2021 09:46Какого размера вы себе представляете рынок запчастей от роботов? И как будет организован сбыт, на авито объявления выкладывать? Расклеивать по подъездам "продам запчасти от роботов"?
vakhramov
26.11.2021 09:58+1Не привязывайтесь к слову Робот. Любая запчасть может стать частью робота. Продавать стандартными методами, начиная с радиорынков, заканчивая объявлениями где угодно.
Для меня удивительно, что рынок не представляете Вы.
Конечно я противник такого подхода, к примеру - я даже писал в спортлото-АвтоВАЗ в 2015 о том, чтобы они все электронные блоки "привязывали" друг к дружке, чтобы нельзя было купить блок от угнанного авто и поменять его. У меня угоняли байк, и я его нашёл) Угоняли не на продажу, а для себя. И на них даже уголовку не завели. Сказали - купили у наркомана, который умер.
cepera_ang
26.11.2021 10:24+1Да мне просто кажется, что каждая запчасть от таких роботов на любой точке продаж будет просто как неоновый знак "я часть криминальной группы ворующей роботов". Одно дело воровать телефоны или велосипеды на продажу или запчасти — они все одинаковые, гигантский рынок сбыта (миллионы или сотни миллионов пользователей), гигантский летигимный рынок б/у техники, куда можно замешать 1% краденой.
Теперь сравните это с уникальными запчастями от такого ровера. Кому они нужны? Другая компания их никогда не купит, индивидуальным пользователям они нафиг не нужны. Может быть найдётся пара десятков/сотен энтузиастов, которые захотят себе краденых деталей, но где вы их искать будете? На авито размещать объявление? Так первым за покупками придёт сам Яндекс к вам, если у него начнут пропадать роботы, потому что имеет ресурсы мониторить любые доски объявлений куда большие, чем эти гипотетические покупатели запчастей. И тут уже не отмажешься мертвым наркоманом, по крайней мере не больше одного раза. И никакого легитимного рынка б/у роверов или запчастей от них, чтобы с ним смешаться — тоже нет.
Из-за всего этого (низкий спрос, большие риски) стоимость этих запчастей будет очень низкой, никаких 75к$ за лидар там и близко не будет. Вот и получится, что соотношение профит/риск будет гораздо хуже, чем у каких-нибудь мобильников/велосипедов или авто.
vakhramov
26.11.2021 11:02Я тоже хочу иногда быть оптимистом :) Рынок роверов вырастет, когда доставщики начнут быстрее находить работу получше. Если отталкиваться от среднего возраста доставщиков, которых я встречал (18-25), демографической пирамиды, роста отраслевой зарплаты, отсутствия роста зарплат в низкоквалифицированных отраслях(там тоже не торопятся с автоматизацией, но гастеры выставляют в райдере проживание+еду+40к в месяц - по данным дружественно настроенной девочки из сферы аутстаффинга; полузакрытые границы спровоцируют рост рано или поздно) - рынок роверов начнёт быстро расти через 5-7 лет.
Роверы сейчас немного режут рынок по верхней планке. Они медленные, дорогие, "последняя миля" для них - реально миля, скорость - пешеходная.
cepera_ang
26.11.2021 11:32Как вы интересно перескочили с рынка краденных запчастей от роверов на рынок доставки. Про ситуацию на рынке доставки ничего особо не знаю, поэтому обсуждать не могу.
mixsture
26.11.2021 13:36Сам рынок применения лидаров пока что молодой. Но он будет расти.
В промышленности появляются новости о применении перевозящих роботов.
У яндекса в доставке — кто сказал, что яндекс будет единственным?
В автомобилях полуавтопилотах и начнет расти еще сильнее с приходом реальных автопилотов.
Тогда же появится потребность и в ремонте всего этого. Поэтому я бы не списывал барахолки из этого оборота.cepera_ang
26.11.2021 14:00Блин, я даже не знаю с чем бы ещё сравнить, чтобы свою мысль проиллюстрировать. Ну вот, например, домофоны — в каждом доме есть, в каждом подъезде нужны и рынок их существует, и скрутить на перепродажу — никаких проблем. Но только почему-то этим никто не занимается, потому что, кому в здравом уме придёт в голову б/у-шный домофон покупать?
Или к примеру рынок оборудования для сотовой связи — оно в буквальном смысле на каждом столбе висит, и потребность в ремонте всего этого есть и т.д., однако нигде не встретишь обсуждений "как же операторы будут действовать, если вдруг соты воровать начнут".
Как будут действовать, как будут действовать — для начала надо дожить до этого момента и увидеть, произойдет ли это вообще в принципе, а потом уже придумывать как действовать. Будут покупать "каску" от угона и повреждения, да и дело с концом. Затраты конечно в конечном итоге на пользователей лягут, так что гипотетический "Вася" воруя робота на разборку, рано или поздно его оплатит комиссиями сервису и всё.
Direvius Автор
26.11.2021 13:51+3На авито размещать объявление?
кстати, когда у нас еще был R1, мы видели на авито такое объявление +) Там продавали нашего робота и обещали "перепрошить под задачи клиента". Мы подумали, а не купить ли, раз они готовы перепрошить )
smoluks4096
26.11.2021 10:10А дальше-то их как дома использовать? Зачем вам в городской квартире тележка на колёсиках?
А до регионов они не дойдут, там объем заказов сильно меньше, чем стоит открыть сервисный центр и базу для роботов, да и радиорынков в регионах в том виде нет, в каком вы это себе представляете
vakhramov
26.11.2021 10:29В регионах частный сектор развит (доля населения в частном секторе в РФ стремится к 30%), снег некому убирать :) В городской квартире конечно незачем.
Я так-то в регионе живу (Нижний Новгород почти), и радиорынок таки есть.


no111u3
25.11.2021 14:48+1А потом и Apple, посмотрев на наш успех, решили переехать на ARM!
а можно какой-то пруф этой истории?



Am0ralist
25.11.2021 15:25+4Direvius, скажите честно:
Чтобы протестировать и обкатать новую подвеску, мы спроектировали её прототип для поколения R2 и оборудовали несколько роботов опытными образцами
Это версия проходила же под именемА как ещё ж...R2-D2
Direvius Автор
25.11.2021 15:56+13я к этому шел с того момента, как предложил первое поколение роботов назвать R1 ;)
vinger
25.11.2021 16:15Классная штука. Хотелось бы побольше узнать про алгоритмы поведения, как робот ведет себя и ориентируется в толпе, как проезжает нерегулируемые перекрестки?

quaer
25.11.2021 16:18+2Насколько лидары безопасны для глаз людей и животных? Влияют ли как-то очки на глазах?
Ультразвуковые датчики как-то на животных влияют?
Он как-то привлекает к себе внимание когда едет, чтобы на него не налететь или не споткнуться?
CrashLogger
25.11.2021 16:44+1Он светится диодами и еще у него флажок сверху. И раскраска яркая. Сложно не заметить.
quaer
25.11.2021 17:33+2На фото белый ровер со светлой полосой подсветки на белом снегу не выглядит очень уж заметным. А флажок болтается на тонкой палочке, так что он визуально отделён от шасси.

AmberSP
29.11.2021 09:58+1Я ростом 1,8, зимой ношу ярко-оранжевый пуховик и красный рюкзак. На меня регулярно натыкаются люди и в упор не видят знакомые.
кажется, дело не только во внешнем виде объекта

konj_v_paljto
25.11.2021 16:57таких ультразвуковых датчиков - от 4 до 16 на каждой современной машине :)
quaer
25.11.2021 17:35Машины по дорогам ездят, а он - там где люди и животные передвигаются.
Direvius Автор
25.11.2021 19:46+1Ультразвуковые датчики как-то на животных влияют?
собаки никак особенно не реагируют. Иногда подбегают познакомиться.
Насколько лидары безопасны для глаз людей и животных? Влияют ли как-то очки на глазах?
у нас есть сертификаты, подтверждающие безопасность лидаров, очки не влияют
Он как-то привлекает к себе внимание когда едет, чтобы на него не налететь или не споткнуться?
сейчас только светом

rtzra
25.11.2021 22:28+1Он как-то привлекает к себе внимание когда едет, чтобы на него не налететь или не споткнуться?
Поверьте, вы заметите ровер еще издалека. Флажок с подсветкой, раскраска корпуса, шум от корпуса и колес когда ровер мчится по дороге (за год моего знакомства с ними они стали ездить быстрее и решительнее) не оставляют шансов неожиданно наткнуться. Еще одна примета: если несколько человек что-то внимательно разглядывают, фотографируют или снимают видео (пару раз видел как бегаю наперегонки) - значит поймали ровер и увековечивают себя на его фоне :-)

kibergus
25.11.2021 23:35+1Лидары светят в ИК. Глаза в этом диапазоне непрозрачны. Луч поглащается роговицей как лазерная указка кожей. До сетчатки свет не доходит.
konj_v_paljto
25.11.2021 16:27Первый всё-таки был самый мимимишный :)
А может, это импринтинг - я ж рисовал его CSSками, чтобы на стажировку пройти.Важность мимиминшости очень высокая, - от этого зависит, будут ли роботов любить или бояться.



Nick0las
25.11.2021 16:56Спасибо за интересную статью. Есть ряд разнообразных вопросов:
Камеры, контроллеры двигателей и прочие модули переиспользуются на других проектах или разрабатывались специально для робота?
Камеры содержат свой модуль обработки или там просто преобразование CSI->???
Планируется ли более широкая серия для робота R3? Или будут еще доработки?
Насколько робот чувствителен к дождю, падающему снегу, брызгам от машин и прочим факторам среды которые портят картинки с камер и лидаров?
Насколько хорошо робот оценивает безопасность серды перед собой? Поедет ли в лужу не зная ее глубины? Сможет ли объехать открытый люк? А яму посреди дороги оставленную коммунальщиками? Сможет ли обьехать стройку по временному огороженному проходу для пешеходов?
konj_v_paljto
25.11.2021 17:03+1(1) В статье вроде написано, что камеры разработаны для "больших" машин-беспилотников, а здесь - переиспользуются.
Direvius Автор
25.11.2021 19:41+1Очень правильные вопросы )
Камеры переиспользуются, изначально они были для машин разработаны. Остальные модули разрабатывались для робота, пока не переиспользуются.
Камеры содержат ISP.
Пока мы планируем произвести сотни роботов этого поколения. Могут быть минорные итерации, мы постоянно аккумулируем опыт из реальной эксплуатации. Если что-то важное, делаем сервисные кампании и докатываем изменения на весь имеющийся флот.
Умеренные осадки - дождь и снег - мы умеем отфильтровывать программно, поэтому движению это не мешает.
Глубину луж пока оценивать не научились, люки, ямы видим лидаром. Сможет ли объехать по временному ограждению — зависит от масштаба изменений. Если осталась часть полосы, то объедет.
cepera_ang
25.11.2021 20:54+2Интересно что глубину луж вы можете оценить гораздо лучше чем кто бы то ни было, ведь у вас есть исходная карта для локализации и текущая поверхностью лужи. Тут не только глубину, тут можно и объём в миллилитрах посчитать, да по всему маршруту, хотя и не в онлайне на самом девайсе :)
А ещё, с такими роботами и автомобилями у Яндекса может накопиться уникальный датасет по качеству дорожного полотна — практически в реальном времени (со скоростью очередного проезда по конкретному месту) можно отслеживать все ямки, трещины и прочее.
Direvius Автор
26.11.2021 00:34Если лужа постоянная (ну или после дождя появляется), то ее проще сразу в карте нарисовать и не ездить туда. Если она внезапная (раскопали и налило), то карта не поможет. Так что каким датчиком померить глубину прямо в онлайне — вопрос открытый )
Кажется я несколько лет назад слышал про проект, в котором вешали камеру на бампер машине и ездили искали трещинки с помощью нейросеток.

telpos
27.11.2021 14:08Лужи бывают на понижениях тротуаров перед переходом, а по краям лужи - заборы. Учитывая, что переходов и так мало, объезды могут быть очень длинными
czz
27.11.2021 16:00Так что каким датчиком померить глубину прямо в онлайне — вопрос открытый )
Эхолотом? :)Direvius Автор
27.11.2021 19:59+1Ага, но для этого, кажется, его нужно вывешивать впереди на штанге, чтобы сигнал отражался от перпендикулярной поверхности. И я не уверен, что разрешающей способности хватит. Нужно словить два пика, от поверхности воды и от дна, и понять, что там два пика, причем для разных погодных условий. В общем, звучит как полгода RnD с непонятным результатом ) Можно, но пока не настолько нужно.





aborouhin
25.11.2021 17:19+4Меня всегда интересовал статус вот этих вот роботов по ПДД. Допустим, его на нерегулируемом переходе (или на регулируемом с совмещёнными фазами) сбивает машина. Кто виноват? Водитель обязан пропускать пешеходов, про роботов ПДД молчит. Да и его небольшая высота (флажок не спасает) делает его "невидимым" для водителей, у которых реакция настроена на объекты плюс-минус человеческого роста.
svidetelj
25.11.2021 19:02+3Предлагаю вспомнить про собак. Их водители отлично видят и пропускают на пешеходных переходах и не только. А робот покрупнее собаки будет
aborouhin
25.11.2021 19:13+3Аналогия хорошая, т.к. про собак в ПДД тоже ничего. Можно судебную практику по собакам посмотреть, спасибо за идею. Но вот практическая актуальность проблем с собаками гораздо ниже.
Собак сбивают регулярно, но споры по поводу сбитой собаки, переходившей дорогу без хозяина (если с хозяином - то тут уже пропускают его), возникают всё-таки, подозреваю, редко. Собака непонятно чья, так что ни её хозяин к автомобилисту не может предъявить претензии, ни автомобилист не знает, с кого за бампер с фарой требовать.
А вот по поводу приведённого в негодность весьма недешёвого робота, владелец которого очевидно известен, и/или разбитого этим роботом передка машины (робот ещё и пожёстче собаки будет, так что повреждения могут быть сильнее) спор практически неизбежен.
svidetelj
26.11.2021 00:10+1Собак больше сбивают когда они неожиданно дорогу перебегают.
Случаев, когда собаку сбили из-за того, что её не видели на дороге - имхо не бывает. За исключением тех случаев, когда за рулем сидит садист какой-нибудь. И в упор "не видит" собаку.
cepera_ang
25.11.2021 20:56+2А если на дорогу бочка выкатится (или любой другой предмет) — какой у неё статус по ПДД?
aborouhin
25.11.2021 21:07+2Для бочки, в отличие от робота-доставщика, появление на дороге - нештатная ситуация, а не предусмотренный производителем процесс. Поэтому и в ПДД её упоминать нет нужды, и при выкатывании бочки на дорогу очевидным образом будет виноват владелец бочки.
В том-то и дело, что сейчас я не вижу принципиальных отличий робота от той самой бочки. Но при этом я не рискую считать его создателей людьми столь... хм... легкомысленными, чтобы дорогостоящие аппараты выпускать на дороги с таким риском. Так ведь охотники за роботами могут появиться, желающие обновить бампер за счёт Яндекса :) Поэтому и интересна позиция Яндекса по данному вопросу.
Archemagus
25.11.2021 18:48Очень интересная статья. Даже вызвала желание зарегистрироваться на Хабре =)
Но мне сильно не дает покоя батарея: в начале статьи было видео по замене батареи, судя по всему третье поколение, но, установка батареи на дно корзины, в которой катается еда - такая себе затея. Начиная от банальной мойки робота, заканчивая неправомерными случаями использования ведра на колесах, как... ведра. Это вам не курьерские сумки стирать.
Во-общем над расположением батареи я бы подумал.
Наиболее удачным местом выглядит между корзиной и носовой частью робота, но доступ сверху закрывает механизм крышки, а сбоку - датчики.
Возможно не плохим планом будет разместить внутри корзины, под крышкой, но вертикально, у передней стенки. Механизм фиксации я бы предложил сделать на направляющих, подобно серверной стойке, с выдвижением вверх.
Я понимаю что урезать длину корзины на 8-13см (высоту батареи сужу по видео) это не удобно, но если есть возможность сделать ее тоньше, но больше по площади, то...
А ваше мнение?
Direvius Автор
25.11.2021 19:12+2у батарейного отсека герметичная крышка и есть сливы для жидкости за контуром герметичности. Но в целом да, вы правы. Мы думаем о лучшем расположении.
если размещать вертикально, то сместится вверх центр тяжести. Батарейка составляет довольно большую долю массы робота, поэтому это важно, чтобы робот был устойчивым
урезать длину корзины тоже не хочется — кока кола не влезет, а пицца без кока колы так себе ) но это в общем то не проблема, можно было бы перекомпоновать, если бы не центр масс

zuek
06.12.2021 17:40кока кола не влезет, а пицца без кока колы так себе
На этом месте аж икнул - никогда не видел любителей пиццу запивать колой - сам предпочитаю пиццу вкушать исключительно отдельно от напитков, иначе у неё вкус портится, к тому же жирные или острые соусы с холодной газировкой - очень на любителя. Хотя, может быть это дело вкуса - допускаю, что многие любят именно сочетание пиццы с колой...

mikelavr
25.11.2021 19:26На материнской плате R2 видно два разъема под miniSIM. Эти разъемы - без фиксации симкарты, ее можно легко вынуть. У вас не было проблем с вылетанием карты из за вибрации?
Мы (для автомобильных систем) были вынуждены перейти на разъемы под microSIM с полной фиксацией. Пусть это и не так удобно при замене симки.
Ocelot
25.11.2021 20:57+1Сбоку от платы привинчивается пластмассовая деталь, которая не даёт симкам выехать.

event1
25.11.2021 21:36Очень интересно. Спасибо за статью. Скажите, а почему у вас GPS отдельным модулем, а не вместе с LTE-модемом?
rtzra
25.11.2021 22:38+1Как-то шутили что Яндексу надо в роверы динамики поставить. Тогда можно благодарить при получении заказа, желать встречным времени суток, озвучивать "брысь с дороги, кожаные мешки", а в опасной ситуации для ровера включать "Помогите, я застрял" (не далее как вчера ровер смело полез в сугроб, который у него перед носом сделала снегоуборочная машина и немного застрял, но рядом шли девушки и подтолкнули).
cepera_ang
25.11.2021 22:49+1Не понятно только почему это шутка? В каждом авто есть клаксон, у велосипедов — звонок, а у пешеходов — рот. То что, авто может только бибикать — это по сути исторический артефакт, привычка из времен, когда ничего сложного на динамик вывести было невозможно. А роботу, имхо, сам бог велел голосовой интерфейс приделать, тем более, что у Яндекса есть все технологии, Алиса на колесах, вежливо расталкивающая пешеходов...

rtzra
25.11.2021 22:46+1Кстати, немного о выгорании у роверов :-) Народ знатно постебался в чатиках: "Подогрев еды", "Это явная реклама для Яндекса - "у наших роверов горят не только глаза", "наши роверы вкалывают так усердно, что горят на работе" и т.д."


sunsexsurf
26.11.2021 00:51+1Планируете ли (Яндекс славится этим, в общем - поддержкой индустрии) выкатить какой-нибудь гитхаб, в котором будут нейронки (ок, облегченные, не надо SOTA) плюс детальки, которые можно на 3д принтере распечатать (опять же ок, пусть лидара не будет)? Юзкейс такой штуки мог бы быть в духе "напечатаем, будем по этажу из кабинета в кабинет ездить" ну или для персональных исследований. Короч, как его собрать самому?
Direvius Автор
26.11.2021 01:10+3если бы мне надо было собрать самому, я бы пошел по пути первого прототипа:
купил три гироскутера и вытащил бы из них колеса и драйвера
прошивка под драйвера гироскутеров есть в открытом доступе, ее можно модифицировать под свои задачи
в качестве "мозга" взял бы что-то вроде Nvidia Jetson или Nano Pi (в зависимости от масштабов хотелок)
лидар дорогая штука, разве что однолучевой можно было бы поставить. Можно было бы взять Intel RealSense (по офису кататься должно хватить)
рама из алюминиевых профилей собирается
В общем, это другой робот получится совсем. Или можно на алиэкспрессе готовую платформу поискать.
Про планы выкатить часть софта ничего не знаю, знаю, что ребята контрибьютят в науку (пишут научные статьи). Но вообще роботный софт есть, можно взять ROS и собрать для своей машинки интеллект )
cepera_ang
26.11.2021 07:50Можно у нвидии Айзека взять — там и железка и софт, как раз для всяких прототипов.

jumpercc
08.12.2021 15:36Вот тут есть пример по сборке своего мини беспилотника https://habr.com/ru/post/542024/
Тут на примере маленькой версии, но в гитхабе есть поддержка бОльшей версии (с stl'ками), и на youtube видосики про большой тоже есть
sm1rked
26.11.2021 00:55Спасибо за познавательную статью!
Интересно еще прочитать про ваш опыт применения гусениц вместо 2 колес прошлой зимой в Иннополисе! Будете ли вы вновь использовать их? Показали ли они повышенную проходимость? Или колеса в R3 настолько круты, что гусеницы уже не потребуются?Direvius Автор
26.11.2021 01:12Пока рассчитываем на "зимнюю" резину с более цепким протектором. С гусеницами хорошо едет по снегу, но если можно обойтись без лишних компонентов, лучше без них обойтись )

corvair
26.11.2021 06:22Там судя по фото были овероллы - съёмные гусеничные ленты поверх штатных колёс задней тележки, технология из межвоенного периода. Но полугусы тогда показали себя не очень хорошо, а сейчас интерес к ним, как я вижу, возрождается, те же овероллы для грузовиков нынче часто преподносятся как инновация. Забавно видеть подобные решения на современной робототехнике, но если простые и рабочие - почему бы и не воспользоваться решениями столетней давности.
В ходовой надо было сразу воспользоваться опытом производителей трехосных грузовиков, где балансирная тележка всегда находится сзади.
Direvius Автор
26.11.2021 07:15полугусы тогда показали себя не очень хорошо
там колеса поворотные были, а у нас остается танковая схема поворота. Поэтому гусеницы в нашем случае по сути только площади контакта добавляют
В ходовой надо было сразу воспользоваться опытом производителей трехосных грузовиков, где балансирная тележка всегда находится сзади.
да, в этом месте нужно было побольше экспериментов провести
vgogolin
26.11.2021 02:59+1Крутой проект! Доставщикии glovo будут отличаться только умением входить в подъезд, лифт и стучаться в двери. Вы планируете конкурировать с такими умениями или пока решено ограничиться доставкой до парадного?


Stronix
26.11.2021 10:31Хотелось бы подробностей про энергоэффективность ARM vs x86. Выходит производительность x86 была избыточной?

DCNick3
26.11.2021 11:28Arm поэффективнее по метрике «попугаи/Ватт». Можно было просто поставить arm побольше в случае чего
Direvius Автор
26.11.2021 13:52Ага, плюс мы переехали с десктопной системы (мы же просто в компьютерном магазине материнку и комплектуху купили) на специализированное embedded решение.
Am0ralist
26.11.2021 11:29Скорее, армы изначально умеют засыпать глубоко, сокращая потребление, но оставаясь в работе, у x86 даже в планшетах с этим до сих пор проблемы, блин.

webzuweb
26.11.2021 12:36+2Статья классная. Работа проделана колоссальная.
Кто Ваш основной конкурент?
Direvius Автор
26.11.2021 13:55Думаю Starship — у них самые продвинутые технологии и много продакшн опыта.
webzuweb
26.11.2021 15:00Используете ли Вы ROS/ROS2?
Почему нет физического бампера? Как детектировать тонкий предметы вроде столбиков? Мы для робота для гольф намучились с этой проблемой? Golf-robotics.com
Почему не используете колеса 10'? От Xiaomi отличные, в Китае есть в продаже. Стабильные.
Как решить проблему доставки не до подъезда, а до двери?
Когда на Ваш взгляд роботы станут эффективнее дешёвой рабочей силы?
Какая оценка завтра на сборку одного робота? На проект целиком?
Можно ли купить контроллеры двигателей? Чем они лучше ODrive? Кроме того, что они ЯНДЕКС?
Direvius Автор
26.11.2021 17:02+3Используете ли Вы ROS/ROS2?
ROS
Почему нет физического бампера?
мы избегаем механического контакта
Как детектировать тонкий предметы вроде столбиков?
мы в наш лидар прекрасно видим даже собственный флажок. А какие у вас сенсоры?
Почему не используете колеса 10'? От Xiaomi отличные, в Китае есть в продаже. Стабильные.
слишком большие и тяжелые. Мы их смотрели и собирали на них прототип. Проходимость отличная, но тяжеловат. Уже ближе к танку ) Вообще у колесных платформ потенциал большой, мы искали баланс для езды по городу, а вот эти ребята по бездорожью жгут:
Wesha
26.11.2021 21:36Проходимость отличная, но тяжеловат
Так это ж великолепно — хулиганы надорвутся опрокидывать!
Direvius Автор
27.11.2021 00:27+1Прошу прощения, я отвлекся и не ответил на часть вопросов. Исправляюсь.
Как решить проблему доставки не до подъезда, а до двери?
если в доме безбарьерная среда, то можно. Если нет, то пока не знаем )
Когда на Ваш взгляд роботы станут эффективнее дешёвой рабочей силы?
на мой взгляд, роботы будут сосуществовать с людьми и заберут самую рутинную часть работы
Какая оценка завтра на сборку одного робота? На проект целиком?
NDA
Можно ли купить контроллеры двигателей? Чем они лучше ODrive? Кроме того, что они ЯНДЕКС?
Купить нельзя, когда что-то продаешь, это накладывает на тебя обязательства по поддержке этой штуки. Нам не интересно их отдельно продавать. Текущие наши драйвера лучше ценой, в них используются герметичные automotive разъемы, мы их контролируем и можем быстро запилить новые фичи, если нужно, или перейти на новые чипы (кризис компонентов нас зацепил, ага).

dts
28.11.2021 03:01видел таких роботов (но не Яндекса) в Эстонии. В Таллине развозят заказы из продуктового магазина Selver.
Местные гаишники уже все изменения под роботов внесли в ПДД. пруф (по тексту более 100 раз упоминается робот)
order227
28.11.2021 11:36Круто же! ИТ в Эстонии в принципе отлично развит, так что не удивительно. Наши в Москве первые шаги разрешительные сделали, думаю и законы скоро подтянутся. Что что, а зарегулировать все бумагами у нас любят))
Am0ralist
30.11.2021 11:01Угу, то-то изменить ПДД под самокты уже лет 5 обещают, а то, что под видом электровелосипедов продают мотоциклы по ПДД — внимания вообще ноль. Как и реакции на велосипеды, едущие со скоростью под 100 км/ч…
zuek
06.12.2021 17:54Ну, я на обычном, даже не "гоночном" велосипеде в юности "под 100" гонял - с моста обгонял автобус, идущий не менее 60 км/ч. Да, "под горку", но совершенно без защиты (какой шлем в конце 80-х?!), и общей массой менее 60 кг - устойчивость, думаю, была никакая, а тормозной путь как-то составил метров 30, если не больше (и да, покрышку после такого пришлось менять)... теперь-то понимаю, что "поступал не совсем умно", но и "велосипедист", едущий на скорости 30-50 км/ч у меня не вызывает никакого особенного непонимания.
Am0ralist
06.12.2021 18:20По пдд:
мотор до 250 ватт и скорость от мотора до 25 км/ч — велик, права не нужны.
до 4 квт и до 50 км/ч — мопед.
выше — мотоцикл.
Фиг с ними, с мопедами, права и шлем на них ввели после нулевых, когда бушные всякие азиатские скутеры чуть ли не любой школьник купить мог и гонять, убиваясь…
Но, блин, скорости на моторое выше 50 км/ч — это ну никак не велосипед, блин.

sudden_death
29.11.2021 01:22А есть ли смысл управлять ровером удаленно с помощью пульта? Может тогда увеличится процент успешных доставок или нет? Аналогично про связь с клиентом или людьми по дороге, нет ли в этом необходимости? Потому что по курьерскому опыту скажу, что часто требуются непростые уточнения, чтобы добраться до клиента по карте, к примеру если территория у дома огорожена.
В общем хотелось бы, чтобы курьеров переквалифицировали в операторов)Direvius Автор
29.11.2021 09:48Если ровер сталкивается с какой-то непреодолимой проблемой в пути — он может запросить помощь удаленного оператора. Один оператор приглядывает сразу за несколькими роботами, но он не управляет ими с пульта.
А вот по поводу карты у роботов преимущество — если один столкнулся с трудностями, карту поправили, то все роботы узнают об изменениях.
хотелось бы, чтобы курьеров переквалифицировали в операторов
Уже можно переквалифицироваться, следите за вакансиями. Роботам помогает helpdesk.
Am0ralist
30.11.2021 11:03Группа технической поддержки автономного флота
звучит солидно) Когда звезду смерти по планам строить начнёте? Или вначале ракеты?



kefirfromperm
29.11.2021 15:34+1"большую часть времени робот ездит по очищенным тротуарам"
Т.е. в России не собираетесь их использовать?Am0ralist
30.11.2021 11:04Ну, в мск их чистят. Так что где-то в РФ использовать будут. В остальных частях придётся вначале автономных чистильщиков тротуаров создать.
mixsture
29.11.2021 16:09+1А вот интересно — подошел дядя Вася, опрокинул его набок. Еда внутри помялась, кофе потекло, да и вообще робот 3 часа пролежал на боку, пока его обратно вернули, теплая еда остыла и доставку спустя 4 часа не хотят принимать.
Какой правовой статус у этого? Кто виноват? Кто покрывает издержки?


D_dMer
30.11.2021 13:30А почему зимой не решили использовать гусеницы? Там глядишь прикрутили башню с пушкой и можно было Министерству обороны предложить))
YuryB
30.11.2021 16:24это всё скорее имиджевый продукт, кожаный мешок бегает быстрее и препятствия преодолевает лучше. и расходов с ним меньше. робот этот в ночной доставке может будет востребован. а так больше похоже на инновации ради инноваций
Direvius Автор
30.11.2021 19:09+2Живых курьеров уже не хватает. И дальше будет не хватать еще больше. Одна половина человечества будет возить посылки второй половине. Если только не научиться масштабироваться. Для этого и нужны роботы.
кожаный мешок бегает быстрее и препятствия преодолевает лучше
Машины тоже сначала были медленнее, чем лошади. Всего 150 лет назад. Я не говорю, что роботы обязательно станут лучше, но если не пробовать, вариант только один, а если пробовать, то два.
Am0ralist
01.12.2021 14:21Живых курьеров уже не хватает. И дальше будет не хватать еще больше.
Так дальше начнутся сокращения старших менеджеров по развесным пряникам и прочих «вам чем-то помочь».
Причём, такими темпами, в РФ это может весьма скоро произойти…D_dMer
09.12.2021 14:58Кто тогда все потреблять станет, кому нужны будут мега фабрики? Мне искренне интересно, к чему это все может привести? С другой стороны появление конвейера не привело к тотальному вымиранию.
Am0ralist
09.12.2021 16:17Ну, уменьшение консультантов и менеджеров в магазинах из-за переходов на схему «шоурумы от производителей и онлайн магазины с доставкой на дом или точек выдачи» глобально поменяет потребление вот прям сейчас. А я имел ввиду только их)

p0st
01.12.2021 15:56А тестирование в Иркутске, Якутске и Магадане не хотите? Там и ванные не понадобятся и много интересного про экстремальные нагрузки посмотреть можно.
Или ровер планируется использовать только в миллионниках/до Урала?

SGordon123
01.12.2021 16:40Не увидел видева , проглядел что ли?https://cs14.pikabu.ru/video/2021/11/30/1638270416294991743_1920x1088.webm

shadrap
02.12.2021 11:09спасибо за статью! Очень интересно. пытались же наверное оценить экономику? Сколько стоит робот? А еще технический вопрос, может пропустил, какой-то протокол общения между роботами продумывается? Ну например, "я обсох, дайте подзарядиться!")) Или "меня кажется украли, пишите видео")))
Direvius Автор
02.12.2021 14:10Сколько стоит робот
NDA
протокол общения между роботами продумывается
Конечно, весь флот провязан через облако, задания получает, обратную связь отправляет. Собираем огромное количество метрик, в том числе по использованию батареек.
shadrap
02.12.2021 14:51|NDA - жаль . Вышеупомянутый старшип заявлял про 5500$, но стремлении к 2200.
Я имел ввиду peer to peer общение , не через телеметрию. Ведь наверняка проблема "проблемных зон" для связи и ГПС существует. Планируется ли коммуникация между роботами?
Direvius Автор
02.12.2021 17:26Робот полностью автономный, а для навигации GNSS используется лишь как один из источников информации. Поэтому переживает проблемные зоны.
Интересно, на какой технологии можно было бы поднять P2P между роботами? WiFi кажется слишком короткий.

Slash
02.12.2021 18:13@Direvius Леш, привет, а покажите пример как вы видите пространство? У вас наверняка есть визуализация конечной картинки, компиляцию данных со всех датчиков и то какие решения принимает робот. Например сейчас по сети гуляют видео где два ровера столкнулись на тротуаре друг на против друга, и ждут пока их обойдут люди прежде чем разъехаться, при принятии решения они знают, что "братья" или просто рассматривают друг друга как какое-то препятствие?
Direvius Автор
02.12.2021 22:39Привет! Картинку не можем показать, NDA. Роботы детектятся как отдельный класс.
Raah
06.12.2021 14:54В интересах роверов хорошее качество тротуаров, они могут отслеживать ямки, лужи и высокие бордюры и передавать информацию городским службам. Город получит мониторинг состояния пешеходных зон, возможно даже бесплатно;)
svyatoslavalekseev
06.12.2021 16:46Будущее за шагающими роботами, конечно. Крупным компаниям уже стоит изучить вопросы инвестиций в искусственные мышцы, которые рано или поздно станут заменой сервоприводам. Для России технология колесных роботов-доставщиков, увы - сезонная услуга, соответственно, даже если шагающий робот будет на треть дороже - выгоднее использовать его. А всё что нам показали авторы, за исключением компьютерного зрения - технологии десятилетней давности, которые можно реализовать за счёт Arduino. Я честно говоря был очень раздосадован увиденным. (
sergeyns
Сталкиваются на тротуаре яндекс-курьер, чувак на яндекс-самокате и яндекс-робот...
Кто виноват? - Яндекс карты, конечно ))