
Пройдёмся по разным архитектурам построения серверов — от самой простой синхронной к более интересным, посмотрим на типичную архитектуру корутинового движка, а после окунёмся в дебри C++ и взглянем на самое страшное на примере нашего фреймворка userver.
Пишем синхронный сервер
Представьте, что у вашего сервиса очень маленькая нагрузка — 100 rps, и вам дали задачу написать простой сервер, понятный каждому второму школьнику. У вас получится что-то наподобие следующего:
void naive_accept() {
for (;;) {
auto new_socket = accept(listener);
std::thread thrd([socket = std::move(new_socket)] {
auto data = socket.receive();
process(data);
socket.send(data);
});
thrd.detach();
}
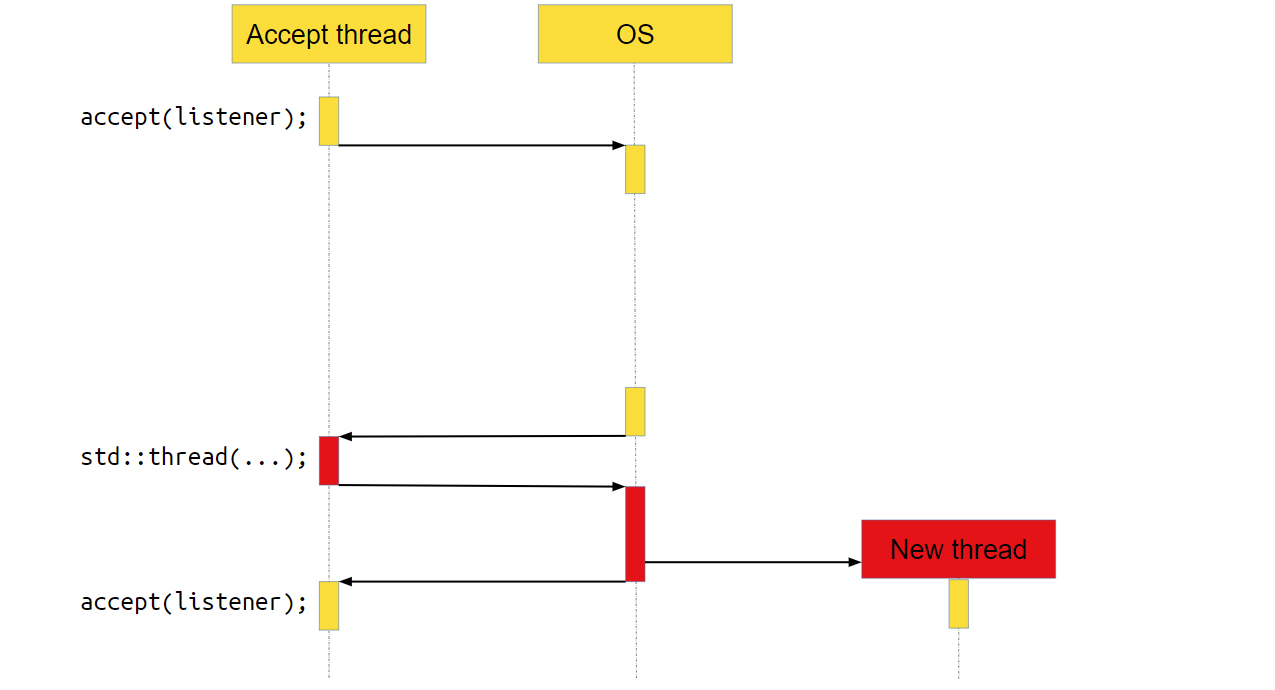
}Сервер принимает новые соединения в бесконечном цикле с помощью функции accept. Как только у нас появляется новое соединение socket, мы передаём его в отдельный поток выполнения и уже в этом потоке с ним работаем. Мы считываем из socket’а данные, обрабатываем их и отправляем обратно по socket’у ответ. Всё очень просто. Как такой сервер выглядит для операционной системы (ОС)?
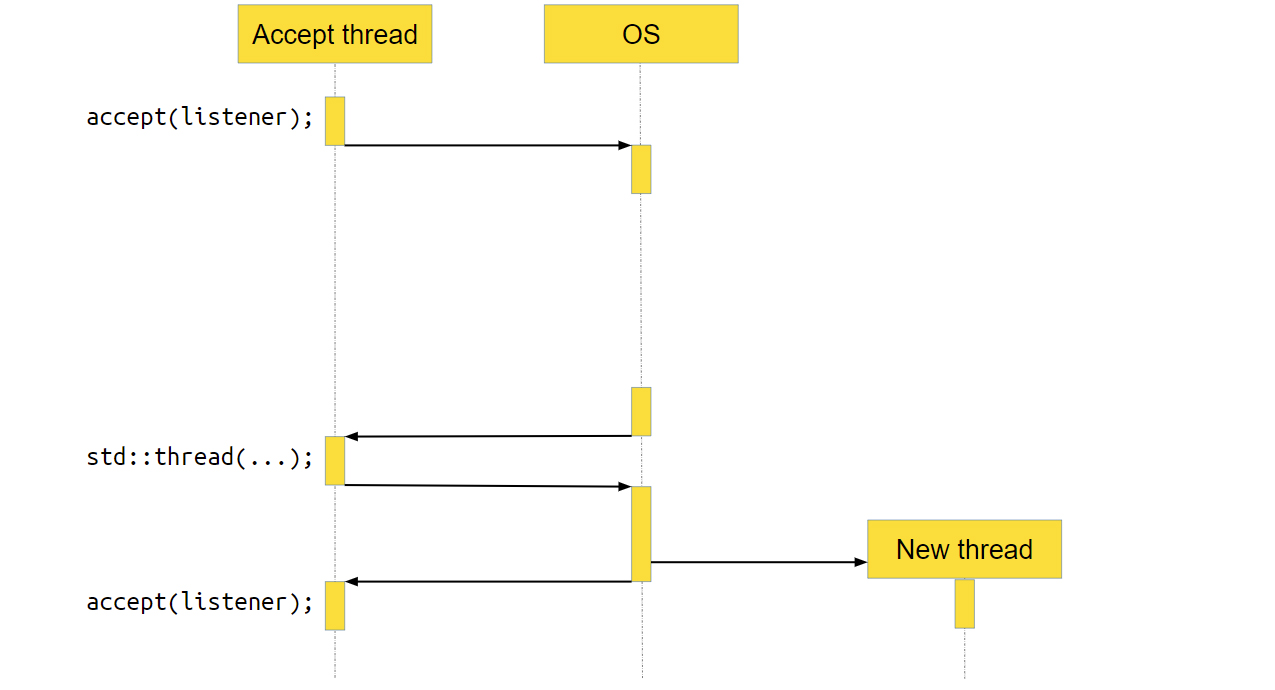
Мы вызываем accept. accept — это системный вызов, то есть функция, которая пойдёт в операционку, и уже операционка выполнит необходимые действия, в данном случае — вернёт новое соединение.
Но нового соединения может и не быть, если пользователи нашего серверного приложения ещё не сделали к нему запрос. В этом случае ОС приостановит приложение, переключит контекст на другое, и ядро процессора будет работать с другой программой.
В какой-то момент новое соединение появится, операционная система это заметит и вернёт нашему приложению управление. Программа продолжит работать как ни в чём не бывало.
Переходим к следующей строке кода. Там создаётся std∷thread, куда мы передаём socket. За вызовом std∷thread тоже находится системный вызов, достаточно тяжёлый на многих операционных системах. Мы получаем новый поток выполнения. После этого всё продолжается в бесконечном цикле: мы опять вызываем accept, идём в операционную систему, делаем системный вызов, а ОС приостанавливает наш поток.
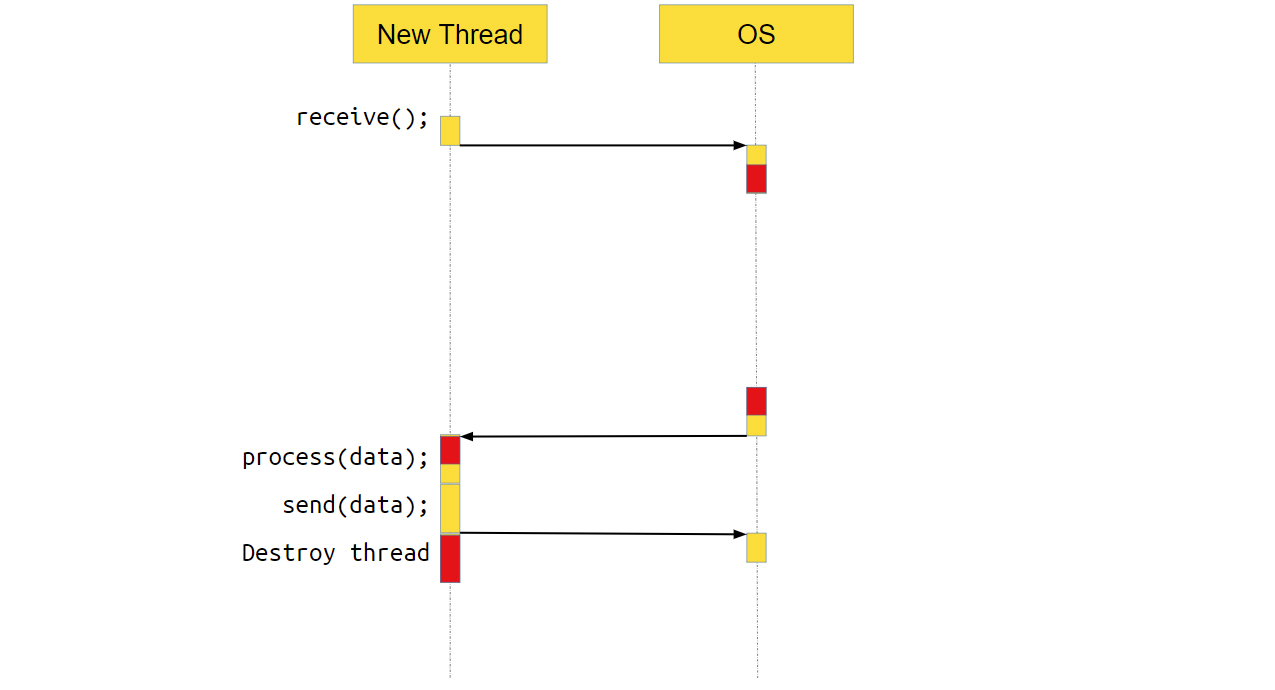
Что делает новый поток?
Что происходит с потоком, который получил новое соединение и обрабатывает его? В нём тоже выполняется системный вызов receive. То есть мы идём в систему, говорим: «Эй, операционка, дай нам данных! — а ОС отвечает, — Ой, на socket нет данных, пусть поток поспит, пока данные не появятся».
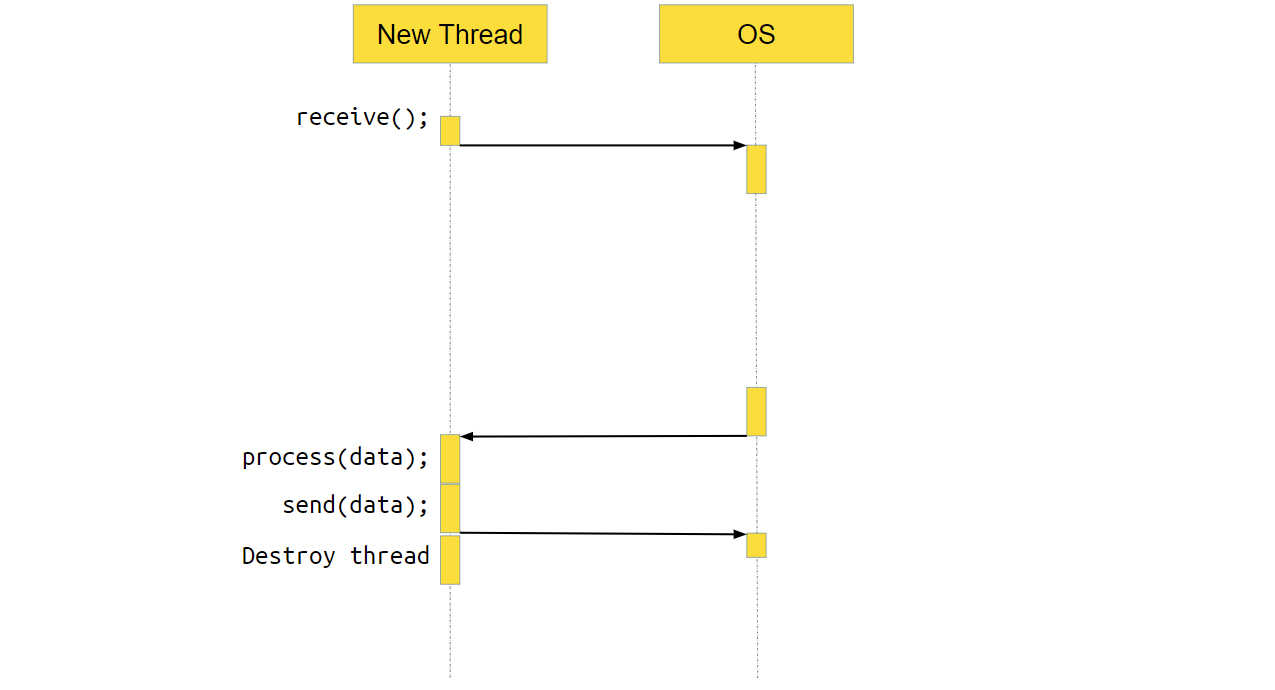
Когда данные появляются, ОС переключает выполнение обратно на наше приложение, оно обрабатывает данные и отправляет их через ОС по socket пользователю. После этого поток уничтожается — он своё дело сделал.
Плюсы и минусы наивного подхода
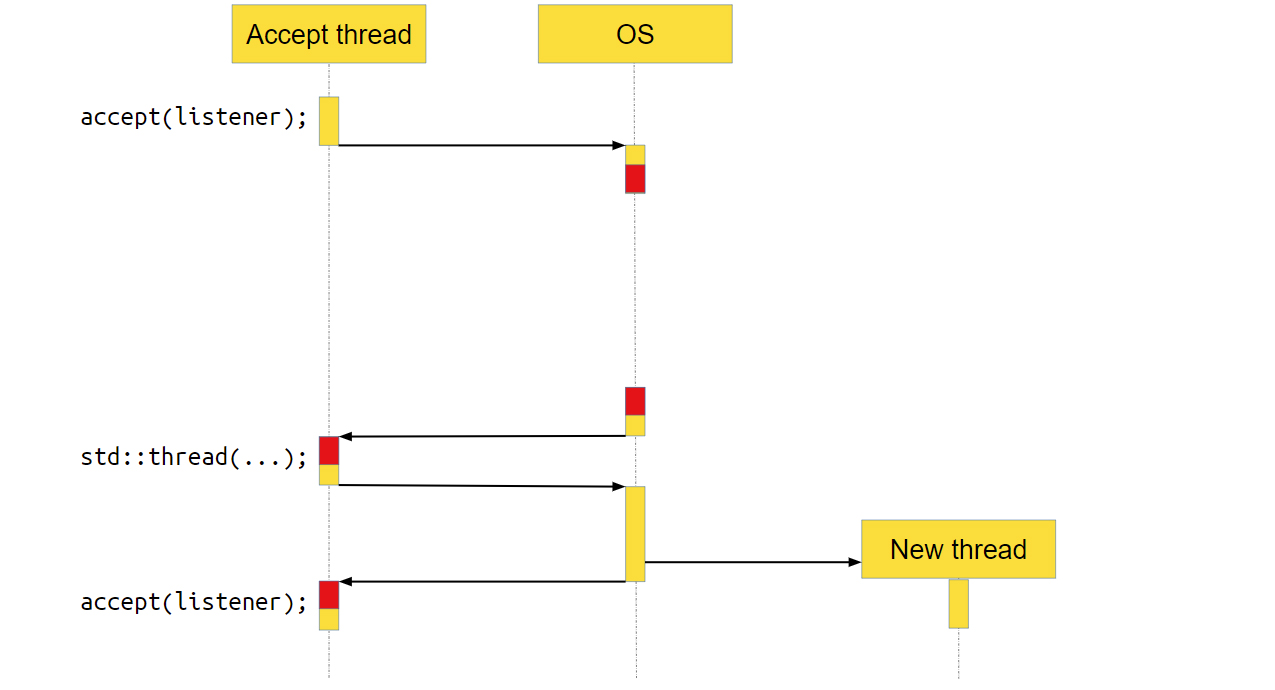
Плюсы описанного подхода очевидны — получается очень простой сервер. Его легко написать, легко читать, он понятный. Но есть и минусы, например, сервер весьма неэффективен, потому что мы делаем много тяжёлых операций, которых можно было не делать.
В табличке показано, сколько времени занимает та или иная операция:
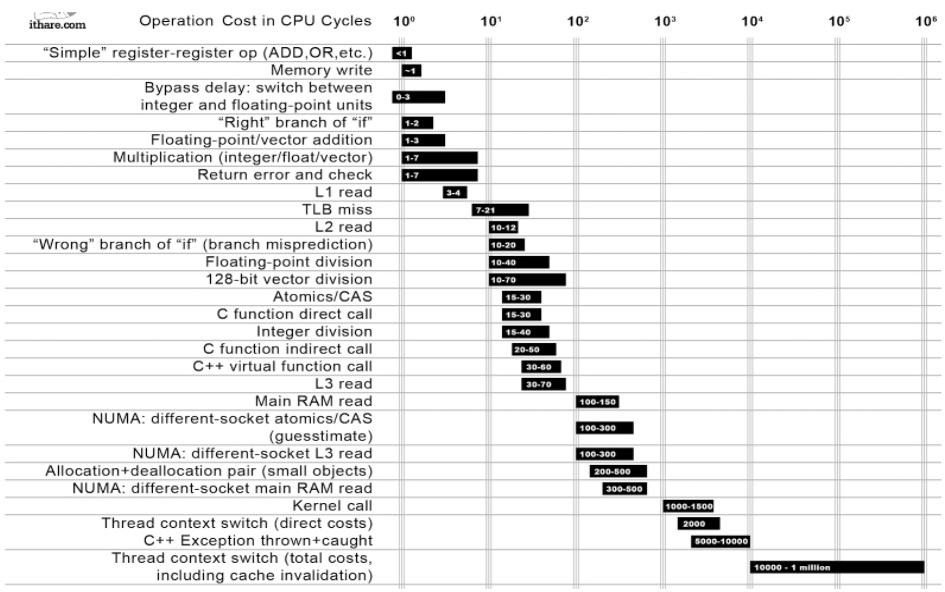
Самые «дешёвые» операции стоят наверху. Например, перемещение данных из регистра в регистр занимает меньше одного такта. А самые «дорогие» операции находятся внизу. И среди этих операций есть системный вызов, который занимает 1000–1500 тактов. А в самом-самом низу находится системный вызов, который приводит к переключению контекста. Такое переключение с возвратом обратно в приложение занимает от 10 тысяч тактов до миллиона.
Если наше приложение занимается в основном тем, что получает данные и отправляет их куда-то, то есть является I/O bound приложением, количество переключений контекста может быть очень большим. Если от них избавиться, приложение станет работать в 10, 20, 30, а то и в 100 раз быстрее.
Другой недостаток этой архитектуры — то, что мы порождаем новый поток на каждый пользовательский запрос. Для некоторых приложений это может быть недопустимо. Например, приложения на Python, как правило, однопоточные. И создать в них новый поток — весьма своеобразная задача. Следовательно, для Python такая архитектура не подойдёт.
Создание потока — дорогая и тяжёлая операция. Если бы мы переиспользовали потоки, то получили бы дополнительный прирост производительности, а если бы работа шла в одном потоке, наша архитектура подходила бы для Python.
Пишем асинхронный сервер
Представим себе, что нагрузка возросла так, что самый простой сервер нас уже не устраивает. Нужно что-то более производительное — асинхронный сервер!
В чём его отличие? В синхронном сервере мы говорили: «Операционная система, дай нам новый socket», — и пока новый socket не появлялся, операционная система приостанавливала поток. Она возобновляла работу, когда событие случалось — когда мы получали новое соединение.
А в асинхронном сервере мы запрашиваем у операционной системы уже случившиеся события. Мы можем работать с ними сразу — выполнить какую-либо функцию или callback, связанный с этим событием. Мы забираем то, что уже готово, тем самым избавляясь от переключений контекста. В псевдокоде это выглядит примерно так:
void async_accept() {
accept(listener, [](socket_t socket) {
async_accept();
socket.receive(
[socket](std::vector<unsigned char> data) {
process(data);
socket.send(data, kNoCallback);
});
});
}
Есть функция async_accept, и в ней первой же строчкой мы вызываем асинхронный приём нового соединения — accept. В этот момент мы говорим ОС: «Операционка, начинай отслеживать событие получения новых socket’ов на этом socket listener». Когда событие произойдёт, ОС сообщит о нём фреймворку, внутренности фреймворка вызовут callback `[](socket_t socket)` и передадут в него новый socket.
Асинхронный accept отрабатывает сразу, то есть мы не ждём, пока появится socket. Мы сказали операционке наблюдать за новыми событиями, и вызов тут же отработал — мы вышли из функции async_accept.
А вот когда socket появился, ОС сообщает об этом нашему движку, и движок вызывает callback. Внутри callback’а опять вызывается async_accept. Мы как бы говорим операционке: «Продолжай следить за новыми соединениями».
А ещё говорим: «За новым socket’ом тоже приглядывай. Когда там появятся данные, позови вот этот callback `[socket](std::vector data)` и передай в него вектор с данными». И когда данные появляются, ОС передаёт их в callback. Там эти данные обрабатываются и посылаются наружу через `socket.send`.
Как выглядит такое взаимодействие на диаграмме?

В самом начале мы вызываем accept и говорим системе: «Следи, появятся ли новые события». А спустя какое-то время движок идёт в ОС и спрашивает: «Ну что? Какие события свершились?» И операционная система, например, может ответить: «Есть новое соединение».
Движок отвечает: «Замечательно! Выполняем callback» — а callback первым делом запрашивает у ОС, чтобы она следила за новыми соединениями. Затем работа продолжается, мы вызываем receive для получения новых данных. Говорим операционке: «Отслеживай новые события». Всё, движку пока больше делать нечего.
Через некоторое время движок снова спрашивает: «Операционная система, какие-нибудь новые события случились? Есть над чем мне поработать?» И ОС может ответить: «Да, вот сразу несколько. Во-первых, пришли данные, которые вы запрашивали на socket’е, во-вторых, появилось новое соединение».
В этом случае асинхронный движок выполнит три callback’а: тот, который обработает данные; тот, который отправит данные; и callback, который связан с обработкой нового соединения.
Это уже второе соединение. То есть мы обрабатываем два соединения и accept в рамках одного потока. Это отличная архитектура, которая подходит Python. В чём же проблема с таким подходом, чего нам не хватает? Всё просто — не хватает возможности запускать пользовательские задачи в параллель от выполняемого в данный момент кода.
Запуск пользовательских задач
socket.receive([socket](std::vector<unsigned char> data) {
auto task = Async(process1, data);
process(data);
task.wait();
socket.send(data, kNoCallback);
});
Пользователи могут захотеть запустить обработку в отдельной задаче параллельно с основной, а потом подождать, пока обе обработки завершатся.
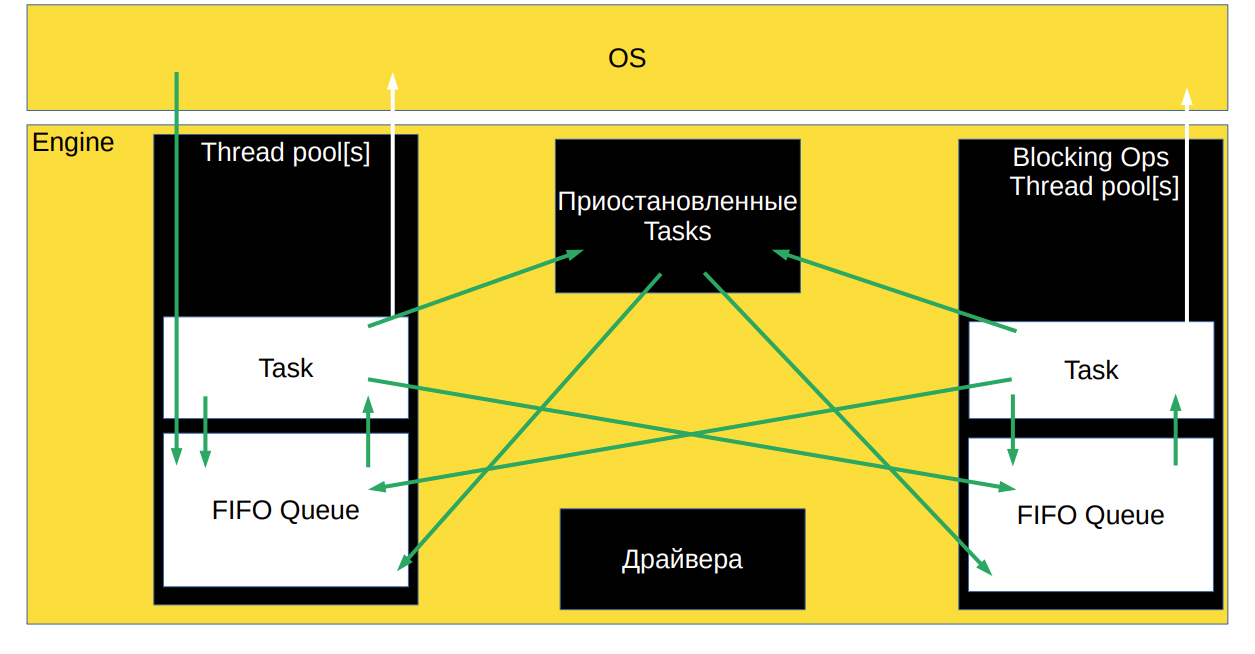
Проблема в том, что операционная система ничего не знает о наших подзадачах. Они внутри движка, а значит нужно учить операционную систему, что у нас есть какие-то свои подзадачи. С ОС в таком случае придётся общаться через системные вызовы, а это не очень эффективно. Другой вариант — завести очередь готовых к выполнению задач. В этом случае асинхронный движок будет выглядеть так:
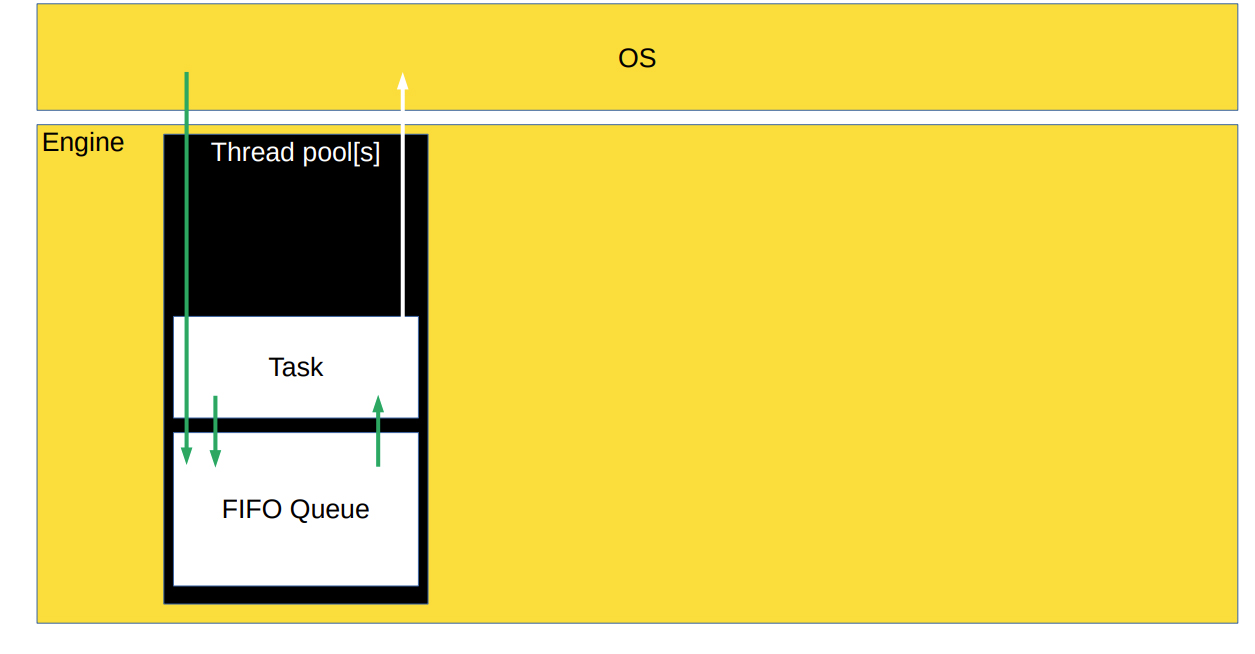
В движке есть thread pool, где хранится очередь готовых к выполнению задач. В thread pool поступают задачи из движка, который собирает события из операционки и добавляет в очередь задач готовые к выполнению callback’и.
Сам thread pool вытаскивает задачи из очереди и обсчитывает их. Во время обсчёта задача может сказать операционной системе: «Начинай следить за какими-то другими событиями». Задача может породить другие задачи, готовые к выполнению. И в этом случае новые задачи также будут помещены в очередь.
Thread pool при этом может состоять как из одного потока, так и из нескольких, в зависимости от того, как вы настроили движок или как он написан.
Но есть нюанс. Такая схема работает хорошо в идеальном мире, где у ОС есть полный набор асинхронных методов под все наши желания. К несчастью, мы живем не в самом идеальном мире, и у операционок не всегда есть асинхронные варианты нужных системных вызовов. Например, посмотреть содержимое директории и прочитать оттуда файл асинхронно может далеко не каждая операционка.
Поэтому во многих случаях заводится отдельный thread pool для блокирующих задач, которые нет возможности асинхронно выполнять в ОС. Он нужен для того, чтобы потоки из основного thread pool не застывали на блокирующих системных вызовах, чтобы основной thread pool занимался только CPU bound-задачами, то есть максимально эффективно загружал процессор.

Из очереди блокирующих задач готовые к выполнению callback’и могут попадать в очередь CPU bound-задач, а задачи из CPU bound pool’а могут закидываться в очередь блокирующих задач. То есть все очереди могут общаться друг с другом и обмениваться задачами.
А как же синхронизация?
И всё бы ничего, но двух очередей не хватает для сценариев с одновременным доступом к одним и тем же данным из разных потоков. Для правильной работы приложения необходимо защищать общие данные примитивами синхронизации, например мьютексами. Снова возникает риск блокировки потока.

Например, если на уже заблокированном стандартном мьютексе вызвать метод lock, произойдёт системный вызов, управление передастся ОС, и система поймёт: мьютекс заблокирован, потоку делать нечего, его надо приостановить, переключить контекст и работать с другим приложением. А вот когда мьютекс разблокируется, поток нужно будет разбудить и сказать, что мьютекс успешно залочился.
Минус в том, что на какое-то время поток застывает и ничего не делает, а это для асинхронного движка не очень хорошо. Приложение простаивает.
Чтобы этого не происходило, можно написать свои мьютексы с callback’ами.
mutex.lock([data = std::move(data), socket = std::move(socket)]() {
process2(shared_resource, data);
socket.send(data, kNoCallback);
});
Например, можно сделать мьютекс с функцией lock, куда мы передаём callback, который нужно выполнить, когда мьютекс будет успешно захвачен. Под капотом этот lock может выглядеть как-то так:
template <class Functor>
void lock(Functor f) {
auto lock = this->try_lock();
if (lock) {
f();
} else {
wait_for_unlock(std::move(f));
}
}Когда вызывается lock(), мы пытаемся захватить мьютекс. Если он успешно захвачен, сразу же выполняется callback. Если же callback не выполнен, его нужно поместить в очередь задач, где он будет ждать освобождения мьютекса. Так в схему асинхронного движка добавляется ещё один блок — приостановленные задачи, которые чего-то ждут.
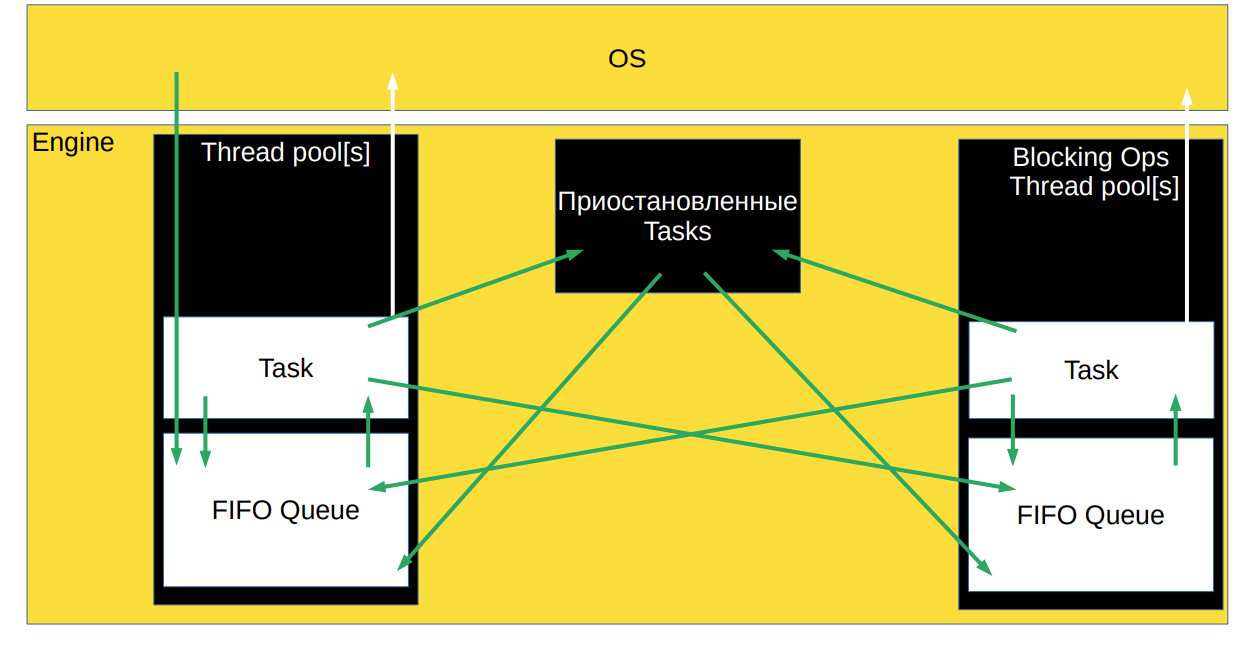
Задачи могут попадать туда из thread pool’а и возвращаться в очередь готовых к выполнению задач, когда их можно разблокировать. В блок могут попадать задачи и из других thread pool’ов, например, из потока блокирующих операций. Главное, что в нужный момент задача вернётся обратно в очередь готовых к выполнению задач нужного thread pool’а.
Плюсы и минусы асинхронного сервера без корутин
Так мы получили асинхронный сервер без корутин. Его плюсы очевидны — всё очень эффективно. Мы можем в один поток обрабатывать множество соединений, нет лишних переключений контекста, а ресурс CPU потребляется минимально. Проблема же состоит в том, что со временем код становится нечитаемым.
void async_accept() {
accept(listener, [](socket_t socket) {
async_accept();
auto something = Async(process1, {42});
auto& socket_ref = *socket; socket_ref.receive(
[socket = std::move(socket), something = std::move(something)](std::vector<unsigned char> data) mutable {
auto task = Async(process1, data);
process(data);
task.wait();
auto& socket_ref = *socket; socket_ref.send(data, [data, socket = std::move(socket), something = std::move(something)]() mutable {
mutex.lock([data = std::move(data), socket = std::move(socket), something = std::move(something)]() mutable {
process2(shared_resource, data);
socket->send(data, kNoCallback);
});
});
});
});
}
Когда пример маленький, простой и мы не передаём много данных между callback’ами, всё читается более-менее нормально. Но когда объёмы данных возрастают и появляется несколько переменных, которые нужно передавать между callback’ами, всё становится значительно сложнее.
Приходится аккуратно следить за временем жизни переменных, правильно и эффективно передавать их в callback’и, не забывать перемещать. Во многих местах нельзя передавать переменные по ссылке, потому что образуется висячая ссылка — код становится ещё и опасным.
Написание кода усложняется, как и его читаемость, работать с ним можно, но неприятно (конечно, если вы не из тех, кому такое нравится). Тут нам на помощь приходят корутины. Смотрим на третий тип архитектуры — асинхронный движок с корутинами.
Асинхронный сервер с корутинами
coro_future coro_accept_stackles() {
for (;;) {
auto new_socket = co_await accept(listener);
auto task = Async([socket = std::move(new_socket)]() -> coro_future {
auto data = co_await socket.receive();
process(data);
co_await socket.send(data);
co_return;
});
task.Detach();
}
}
Как работает такая архитектура? В самом начале мы принимаем socket. При этом рядом пишем ключевое слово co_await для корутин. Приняли socket, создаём новую задачу. Внутри задачи мы получаем данные с socket’а, обрабатываем их и отправляем результат наружу.
При этом всё крутится в бесконечном цикле и код становится очень похожим на самый первый синхронный сервер, который мы писали так, чтобы он был понятен даже школьникам, — практически буква в букву. Разница только в том, что добавляются ключевые слова для работы со stackless-корутинами: co_await, co_return и т. д.
Но можно ли сделать код ещё более похожим на самый простой синхронный сервер? Можно! Для этого нужно воспользоваться не stackless, а stackfull-корутинами. Так код станет один в один таким же, как и у синхронного сервера. Забегая вперёд скажу, что эффективность останется на уровне асинхронного.
Асинхронный сервер с корутинами vs. синхронный:
|
|
Устройство корутинового движка
Давайте взглянем, как корутиновый движок выглядит под капотом.

Схема получается такая же, что была у асинхронного движка без корутин. Всё дело в том, что корутины — это почти callback.
coro_future coro_accept_stackles() {
for (;;) {
auto new_socket = co_await accept(listener);
auto task = Async([socket = std::move(new_socket)]() -> coro_future {
auto data = co_await socket.receive();
process(data);
co_await socket.send(data);
co_return;
});
task.Detach();
}
}
Когда мы пишем co_await, компилятор смотрит всё, что есть рядом в коде, и из этого хитрым способом делает callback, который передаёт в функцию accept.
Когда компилятор видит co_await внутри отдельной задачи, он собирает лежащие рядом переменные, делает из них callback и подсовывает его в receive. Так происходит в случае stackless-корутин.
В случае stackfull-корутин мы как бы превращаем весь наш стек в подобие callback’а. Всё, что есть на стеке, превращается в отдельную задачу, которая передаётся в очередь, откуда её можно запустить и передать в асинхронные методы. С корутинами и асинхронностью у нас всё работает очень эффективно, так же, как было в случае обычного асинхронного сервера с callback’ом, а код остаётся простым и читаемым.
Но есть и минусы. Под капотом у такого асинхронного сервера с корутинами творится лютая жесть. Причём такая же жесть, как если бы мы писали просто асинхронный сервер. И если вы — матёрый разработчик, вам эта жесть может даже нравиться :-) Так что если вы эту жесть разрабатываете и получаете удовольствие, для вас минус может оказаться плюсом.
C++-хардкор
А теперь, как я и обещал, обратимся к конкретному примеру. Посмотрим, как с этой жестью под капотом работает группа общих компонент в Яндексе. У нас есть свой асинхронный фреймворк, который называется userver. Я покажу, как мы реализовали в нём неблокирующий асинхронный мьютекс, используя корутины и асинхронщину.
Архитектура userver напоминает большинство асинхронных фреймворков. Правда, у нас есть ещё и асинхронные драйверы для разных баз данных (PostgreSQL, MongoDB, Redis), socket’ов, DNS, http-протоколов и не http-протоколов. В общем, у нас практически под всё есть свои асинхронные драйверы и асинхронные примитивы синхронизаций.
Сделаем свой мьютекс. Асинхронный, эффективный, подходящий для асинхронного корутинового движка:
struct Mutex {
void lock();
void unlock();
private:
std::atomic<Coroutine*> owner_{nullptr};
};
В userver используются stackfull-корутины, поэтому никаких дополнительных ключевых слов не нужно, и мы можем сделать мьютекс, интерфейс которого совпадает с std∷mutex. То есть с нашим мьютексом можно использовать std::unique_lock.
У мьютекса, как ни удивительно, есть методы lock и unlock, и для того, чтобы всё это заработало, внутри класса мьютекса нам понадобится атомарная переменная `owner_`. В этой переменной мы будем хранить указатель на ту корутину, которая в данный момент владеет мьютексом. Если мьютексом никто не владеет, в этой переменной хранится nullptr.
Метод lock будет выглядеть следующим образом:
void Mutex::lock() {
Coroutine* current = GetCurrentCoro();
Coroutine* expected = nullptr;
if (owner_.compare_exchange_strong(expected, current)) return;
expected = nullptr;
impl::MutexWaitStrategy wait_manager(lock_waiters_, current);
while (!owner_.compare_exchange_strong(expected, current)) {
assert(expected != current && "Mutex is locked twice from the same task");
current->Sleep(wait_manager);
expected = nullptr;
}
}
В самом начале мы получаем указатель на текущую корутину. Это та корутина, которая выполняет метод lock() в текущий момент. Ожидается, что мьютекс в данный момент никем не залочен, и мы атомарно пытаемся это проверить. Говорим: «Если мьютексом сейчас никто не владеет (то есть в атомарной переменной содержится nullptr), запиши туда в качестве владельца нашу корутину. И скажи мне, получилось это сделать или нет».
Если всё получилось и мьютекс захвачен, больше ничего не нужно, мы выходим из функции lock. Если же нам не повезло, и мьютексом уже владеет другая корутина, мы спускаемся ниже, заводим служебную переменную wait_manager, о которой я расскажу чуть позже, и пытаемся повторить процедуру с захватом мьютекса. Если на этот раз мьютекс разлочен, мы выходим из функции lock и уничтожаем локальные переменные.
Если мьютекс ещё захвачен, нужно дождаться разблокировки, а корутину приостановить и переместить в очередь приостановленных задач, неготовых к выполнению. Как же это сделать?
class Coroutine {
public:
// ...
void Sleep(WaitStrategy& strategy);
// ...
};
Внутри корутины есть метод Sleep. Он, как ни странно, приостанавливает корутину. Она перестаёт выполняться до тех пор, пока её не позовут в методе Wakeup.
В Sleep передаётся WaitStrategy — базовый класс, у которого всего две виртуальные функции.
class Coroutine {
public:
// ...
void Sleep(WaitStrategy& strategy);
// ...
};
class WaitStrategy {
public:
virtual void AfterAsleep() = 0;
virtual void BeforeAwake() = 0;
protected:
~WaitStrategy() = default;
};
1. AfterAsleep вызывается сразу же после того, как корутина была остановлена. В этом методе обычно запускаются механизмы, которые могут разбудить кортуину.
2. BeforeAwake вызывается перед тем, как корутина будет разбужена. В этом методе останавливаются все механизмы для пробуждения корутины.
struct Mutex {
void lock();
void unlock();
private:
std::atomic<Coroutine*> owner_{nullptr};
WaitList lock_waiters_;
};
Также в класс мьютекса мы добавляем переменную WaitList. Это очередь корутин, ожидающих разлочивания на этом мьютексе. Если бы мы работали со стандартным мьютексом ОС, такая очередь держалась бы где-то внутри системы. Но так как мы используем свои примитивы синхронизации, необходимости ходить в операционку нет. Мы можем держать всю информацию у себя, например, информацию о том, кто ждёт на мьютексе, держать в самом мьютексе.
Что же в это время происходит в функции lock? Мы создаём переменную класса MutexWaitStrategy, отнаследованного от WaitStrategy. Созданную переменную мы передаём в метод Sleep. И это место — моё самое любимое во всех корутиновых движках, потому что здесь мы можем использовать стек вместо кучи.
void Mutex::lock() {
Coroutine* current = GetCurrentCoro();
Coroutine* expected = nullptr;
if (owner_.compare_exchange_strong(expected, current)) return;
expected = nullptr;
impl::MutexWaitStrategy wait_manager(lock_waiters_, current);
while (!owner_.compare_exchange_strong(expected, current)) {
assert(expected != current && "Mutex is locked twice from the same task");
current->Sleep(wait_manager);
expected = nullptr;
}
}
Например, движку где-то глубоко внутри нужно создать односвязный или двусвязный список и в этот двусвязный список поместить корутину, которая сейчас должна приостановиться. Можно воспользоваться стандартным контейнером, но в этом случае внутри движка будут происходить медленные динамические аллокации при вставке новых элементов.
void Mutex::lock() {
Coroutine* current = GetCurrentCoro();
Coroutine* expected = nullptr;
if (owner_.compare_exchange_strong(expected, current)) return;
expected = nullptr;
impl::ListNode<Coroutine*> node{current};
while (!owner_.compare_exchange_strong(expected, current)) {
assert(expected != current && "Mutex is locked twice from the same task");
current->Sleep(wait_manager);
expected = nullptr;
}
}
А можно воспользоваться интрузивными списками и разместить node этого листа на стеке корутины, которую мы вот-вот приостановим. Когда корутина будет приостановлена, этим стеком всё ещё можно пользоваться, можно даже изменять корутину, потому что она приостановлена, но не уничтожена. Благодаря этому мы можем создать всё, что нужно движку для работы прямо на стеке, и полностью избежать динамических аллокаций внутри движка.
Движемся дальше. Создаём вспомогательную переменную MutexWaitStrategy, и в конструкторе этой переменной захватываем lock, который защищает WaitList, то есть список корутин, ожидающих на мьютексе.
class MutexWaitStrategy final : public WaitStrategy {
public:
MutexWaitStrategy(WaitList& waiters, Coroutine* current)
: WaitStrategy(), waiters_(waiters), current_(current), lock_(waiters) {}
void AfterAsleep() override {
waiters_.Append(lock_, current_);
lock_.unlock();
}
void BeforeAwake() override {
lock_.lock();
waiters_.Remove(lock_, current_);
}
private:
WaitList& waiters_;
Coroutine* const current_;
WaitList::Lock lock_;
};
Этот lock также поможет не пропустить нотификацию о том, что мьютекс разлочился.
void Mutex::lock() {
Coroutine* current = GetCurrentCoro();
Coroutine* expected = nullptr;
if (owner_.compare_exchange_strong(expected, current)) return;
expected = nullptr;
impl::MutexWaitStrategy wait_manager(lock_waiters_, current);
while (!owner_.compare_exchange_strong(expected, current)) {
assert(expected != current && "Mutex is locked twice from the same task");
current->Sleep(wait_manager);
expected = nullptr;
}
}
Создаём Wait_manager, делаем compare_exchange_strong. Не повезло — мьютекс ещё захвачен, идём в метод Sleep. Внутри Sleep корутина будет остановлена, затем выполнится метод AfterAsleep из MutexWaitStrategy. В этом методе мы добавим нашу корутину в список ожидающих на мьютексе.
class MutexWaitStrategy final : public WaitStrategy {
public:
MutexWaitStrategy(WaitList& waiters, Coroutine* current)
: WaitStrategy(), waiters_(waiters), current_(current), lock_(waiters) {}
void AfterAsleep() override {
waiters_.Append(lock_, current_);
lock_.unlock();
}
void BeforeAwake() override {
lock_.lock();
waiters_.Remove(lock_, current_);
}
private:
WaitList& waiters_;
Coroutine* const current_;
WaitList::Lock lock_;
};
Разлочиваем lock, после чего корутина снимается с thread и ждёт, пока мьютекс будет разлочен. В это время движок подхватывает другую, готовую к выполнению задачу, и начинает выполнять её, благодаря чему thread не простаивает. Затем корутина, которая до этого захватила мьютекс, вызывает unlock:
void Mutex::unlock() {
[[maybe_unused]] const auto old_owner = owner_.exchange(nullptr);
assert(old_owner == GetCurrentCoro());
WaitList::Lock lock(lock_waiters_);
lock_waiters_.WakeupOne(lock);
}
В unlock записывается, что мьютексом больше никто не владеет, owner снова принимает значение nullptr. Проходит проверка — мы убеждаемся, что мьютекс разлочивает та же корутина, которая его залочила. После этого захватывается блокировка для WaitList, и мы в WaitList вызываем метод «разбуди-ка одну корутину, которая дольше всего ожидает выполнения».
class MutexWaitStrategy final : public WaitStrategy {
public:
MutexWaitStrategy(WaitList& waiters, Coroutine* current)
: WaitStrategy(), waiters_(waiters), current_(current), lock_(waiters) {}
void AfterAsleep() override {
waiters_.Append(lock_, current_);
lock_.unlock();
}
void BeforeAwake() override {
lock_.lock();
waiters_.Remove(lock_, current_);
}
private:
WaitList& waiters_;
Coroutine* const current_;
WaitList::Lock lock_;
};
WaitList будит корутину и вызывает метод MutexWaitStrategy::BeforeAwake перед тем, как корутина совсем проснётся. В этом методе BeforeAwake мы захватываем lock. Удаляем корутину из списка ожидающих на мьютексе и проваливаемся вниз после метода Sleep.
void Mutex::lock() {
Coroutine* current = GetCurrentCoro();
Coroutine* expected = nullptr;
if (owner_.compare_exchange_strong(expected, current)) return;
expected = nullptr;
impl::MutexWaitStrategy wait_manager(lock_waiters_, current);
while (!owner_.compare_exchange_strong(expected, current)) {
assert(expected != current && "Mutex is locked twice from the same task");
current->Sleep(wait_manager);
expected = nullptr;
}
}
Ожидаем, что с мьютексами никто не работает, и повторяем попытку захвата. Получаем мьютекс, который не блокирует std::thread. То есть std::thread переиспользуется, на нём считаются другие задачи.
Также этот мьютекс не переключает контекст и не общается лишний раз с операционной системой. ОС тоже не приостанавливает поток и не переключает контексты. Кроме того, мьютекс не аллоцирует память динамически. Всё, что нужно было динамически проаллоцировать, мы расположили на стеке корутины. Наш мьютекс хорош ещё и тем, что не требует callback’а, потому что работает с корутинами и выглядит, как обычный линейный код.
А что с производительностью? На бенчмарке, где в бесконечном цикле залочивается и разлочивается мьютекс из разных потоков, мы обгоняем по эффективности обычный std::mutex на одном и двух потоках, а для случаев большего contention я рекомендую использовать другие примитивы синхронизации из нашего фреймворка.
| Competing threads | std::mutex | Mutex |
| 1 | 22 нс | 19 нс |
| 2 | 205 нс | 154 нс |
| 4 | 403 нс | 669 нс |
Что делать, если нужен мьютекс с таймаутом?
Прежде всего нужно добавить в мьютекс новую функцию try_lock_untill, в которую мы передаём дедлайн — указываем, до какого времени нужно пытаться залочить мьютекс.
struct Mutex {
void lock();
bool try_lock_untill(Deadline deadline);
void unlock();
private:
std::atomic<Coroutine*> owner_{nullptr};
WaitList lock_waiters_;
};
Чтобы всё это заработало, добавляем в корутину ещё пару методов.
class Coroutine {
public:
// ...
void Sleep(WaitStrategy& strategy);
Epoch GetEpoch();
void Wakeup(Epoch epoch);
// ...
};
class WaitStrategy {
public:
virtual void AfterAsleep() = 0;
virtual void BeforeAwake() = 0;
protected:
~WaitStrategy() = default;
};
Epoch, то есть количество засыпаний корутины, и Wakeup, который принимает эпоху на вход.
Теперь внутри WaitStrategy в конструкторе мы можем создать таймер на стеке без аллокации, зарядить этот таймер на нужный дедлайн и сохранить в нём эпоху, в которую мы хотим разбудить корутину. Когда таймер выстрелит, он разбудит корутину, если её эпоха не сменилась, а если корутина уже пробуждена — ничего не произойдёт. В методе AfterAsleep как раз можно запустить таймер, а в методе BeforeAwake остановить его, если корутину разбудили из-за мьютекса.
Получается гибкая схема с простым добавлением нового функционала. В какой-то момент мы поняли, что почти каждая операция обладает дедлайном, поэтому в userver код дублируется в WaitStrategy, а дедлайны вынесены в базовый класс. А ещё мы добавили в Sleep информацию о том, кто его разбудил: был ли он разбужен из-за WaitList или по таймауту.
class Coroutine {
public:
// ...
void Sleep(WaitStrategy& strategy);
Epoch GetEpoch();
void Wakeup(Epoch epoch);
// ...
};
class WaitStrategy {
public:
virtual void AfterAsleep() = 0;
virtual void BeforeAwake() = 0;
const Deadline deadline;
protected:
~WaitStrategy() = default;
};
А что делать с отменами?
В корутину добавляются методы Cancel и IsCancelled, чтобы проверить, была отменена корутина или нет.
class Coroutine {
public:
// ...
WakeupReason Sleep(WaitStrategy& strategy);
bool IsCancelled() const;
void Cancel();
Epoch GetEpoch();
void Wakeup(Epoch epoch);
// ...
};
class WaitStrategy {
public:
virtual void AfterAsleep() = 0;
virtual void BeforeAwake() = 0;
protected:
~WaitStrategy() = default;
};
Где-то там находится булевая переменная, Sleep учится смотреть на неё в Wakeup. И, в принципе, это всё. Такую схему легко можно расширить.
В других корутиновых движках схема может отличаться. Например, в стандарте C++20 есть корутины, но они приостанавливаются несколько иначе. WaitStrategy называется Promise type, и устроено всё более наворочено и сложно. Однако нам хватает простого подхода, и работает он отлично.
Коротко об итогах
Мы поговорили о том, что корутины — это просто callback’и, которые по-хитрому подсовываются внутрь асинхронного метода, и не нужно их бояться или стесняться.
Убедились, что асинхронность позволяет избегать переключений контекста и создания новых потоков, экономя CPU. Такая модель подходит большему количеству языков программирования и приложений.
Также мы узнали, что под капотом у асинхронных движков находится жесть, и это прикольная жесть (если вам нравится таким заниматься). А снаружи у асинхронных корутиновых движков всё просто и более-менее понятно. Получается линейный код, в котором иногда надо расставить co_await, если у вас stackless-корутины, или ничего не надо расставлять, вы используете stackfull-корутины.
Во всех движках есть thread pool, очередь готовых к выполнению задач. Очередей может быть несколько, к примеру, у нас в userver есть отдельный thread pool для общения с операционной системой даже для неблокирующих вызовов, чтобы поскорее собирать события из ОС.
Надеюсь, материал оказался для вас полезным и интересным, стало понятнее, как всё устроено под капотом современных языков и фреймворков. Пожалуйста, задавайте вопросы и делитесь мыслями в комментариях — с радостью отвечу.
P. S. Кстати, уже в этом году мы перейдём на открытую разработку и опубликуем userver под лицензией Apache 2.0 на GitHub, чтобы им мог воспользоваться любой желающий. Надеемся, что вам понравится наша работа!
P. P. S. Эта статья — авторская переработка доклада с C++ Zero Cost Conf.
Приходите к нам летом на следующую конференцию послушать про практичное применение C++. А ещё у нас есть много других интересных докладов, ближайшие — на HighLoad++.
Комментарии (30)

progman78
27.01.2022 17:40+1Дико извиняюсь но не совсем понял как будет работать асинхронный сервер в таком кейсе:
в сокет от клиента поступает запрос, например на проверку пароля.
Требуется запрос к БД - пока от БД ответ получен не будет функция не может работать дальше. Допустим к БД запрос 200мс идет ( знаю что много, но допустим ). Получается ваш асинхронный поток тоже на эти 200мс блокирнется... или я что то не понял?
С Синхронным все понятно - boost::asio кол-во потоков равно кол-ву ядер или х2 ядер. На блокирующих запросах к БД поток "стоит" ждет ответа.
Получается никаких преимуществ нету у асинхронного в случае запросов с большим количеством разных блокирующих операций такими как работа с БД?

antoshkka Автор
27.01.2022 17:53С базами данных тоже можно работать асинхронно. Тогда ваш пример при использовании асинхронности с callback наподобие boost::asio будет выглядеть так:
socket.receive( [*this, socket](std::vector<unsigned char> data) { database->execute("SELECT hash FROM passwords WHERE id=$1", data, [*this](auto answer) { socket.send(answer[0][0] ? "OK" : "FAIL"); }); });Поток не будет блокироваться на 200ms. Вместо этого, пока не получен ответ от базы данных, поток будет обрабатывать другие запросы. А когда ответ от базы данных будет получен, callback
[*this](auto answer)будет перемещён в очередь готовых к выполнению задач и выполнен.Если добавить корутины, то вся подкапотная магия с асинхронностью остаётся, но код начинает выглядеть как синхронный:
auto data = socket.receive(); auto answer = database->execute("SELECT hash FROM passwords WHERE id=$1", data); socket.send(answer[0][0] ? "OK" : "FAIL");progman78
27.01.2022 18:10+1ммм получается если взять гипотетический процессор с 96 ядрами то в случае синхронного сервера 97 запросов пришедших одновременно будут обрабатываться примерно 400мс ( если запрос к БД всегда 200мс к примеру ) потому что на 97й запрос у процессора нет ядра свободного и поток мы не создавали 97й. Сервер простоит без работы 200мс потом когда освободится 1й поток он за 200мс обработает 97й запрос от юзера. итого примерно 400мс
а если асинхронный то все 97 запросов прилетят и встанут в очередь и будут ждать 200мс пока БД не пришлет ответ .
В таком синтетическом тесте профит несомненно есть.
Замечу лишь что в реальной жизни кол-во потоков задается как х2 от количества ядер. да и такие запросы приходят не одновременно. В итоге такого лютого лога не происходит.
Наверное если стоит задача 500 тысяч запросов в секунду отработать то такая магия с асинхронностью оправдана. У нас просто скромнее все и "жалкие" 5000 запросов в секунду сервер вполне справляется )

technic93
27.01.2022 21:23+6Грубо говоря асинхронный сервер это такой же синхронный сервер, только потоки управляются в юзер-спейс, и меняют название на корутины. Это экономит число хождений в ядро. И для остановки потока вместо блокирующих сиколлов используется конструкция языка co_await для корутин.

klirichek
29.01.2022 11:24А процессор с 96 ядрами на какой стороне? На клиенте? или обрабатывает?
Если он на сервере обслуживает БД и эти 200мс почти полностью эффективно тратит на реальную работу - то да, ~400мс и выйдет (не считая нюансов, что эффективная работа = ~100% загрузка ядра, и если 96 ядер одновременно нагрузить на 100% - там уже может другая автоматика сработать. Например, сбросить частоту, или запаузить некоторые ядра. Или система электропитания хорошая и ей ничего не стоит справиться с таким пиком).А если на клиенте, который отправляет параллельно 97 запросов, и через 200мс приходят ответы, а клиенту в это время делать нечего - там может быть хоть одно ядро первой "малинки". 97 потоков на нём разрулятся средствами ОС.
Смысл превращать потоки ОС в файберы (таски, корутины, контексты - как удобнее) возникает, когда речь не о 97 по 200мс, а, скажем, 97К по 200мкс.
antoshkka Автор
29.01.2022 11:49+1Проблема возникает на порядок раньше. У неё даже название есть - C10k, так что уже при подходе к 10к RPS вам нужен асинхронный движок (с корутинами или без).
progman78
29.01.2022 12:30У меня 32 ядерный DELL в Хецнере используется для обработки запросов с клиентов. Кол-во потоков 128
БД в отдельном сервере. В каждом потоке создается коннект к БД.
Среднее время обработки БД запроса 10 мс. Среднестатистически простоев пока нет и 10 тысяч выдержит сервер. Вот 50 - уже сдохнет.
математика тут простая каждую секунду 10мс поток "занят" запросом. Значит через один поток может 100 запросов пройти. через 128 потоков 128 х 100 = 12800. Так что да - когда будет существенный рост в сторону 10К то только на асинхронный переписывать сервак
klirichek
29.01.2022 13:36Ну тут интересно помоделировать.
Если все по 10мс - то ничего необычного, всё переварится.
А если большой разброс - уже возникают интересности.
Например, прилетела пачка "тяжёлых" запросов, каждый из которых выполняется 500мс. Скажем, штук 200. Потом пачка мелких, по 1мс. Штук 500. Но в целом, в окне, скажем 3 секунд все укладываются в 12800rps.
Вот тут-то оно и всплывает. Если все ядра ждут на длинных запросах - в это время они не будут обрабатывать другие. И с этого момента модель "1 поток - 1 запрос" начинает сдавать. До определённого момента поможет простое увеличение числа потоков (и ваши 128 на 32 физических ядра - это уже шаг в этом направлении). Но тут уже примерно похоже на описанное в статье: рабочий код очень простой, однопоточный. А "под капотом" ОС видит, что потоку нечего делать и вытесняет его другим потоком, у которого появились данные и его надо пробудить. И вся "жесть" остаётся там, в чёрном ящике.
Однако с определённого числа потоков станут видны ограничения. Во-первых, в top станет видно, что процессор всё больше и больше занимается "какой-то фигнёй" (и помимо переключения потоков там будет ещё светиться "ныряние" в ядро и назад для чтения/ожидания кусочков данных). Во-вторых, у каждого потока есть стек. Вроде пустяки, 2мб (по умолчанию). Но вот 500 потоков просто "за будь здоров" уже съели гиг...
Переписывать программу на асинхронную - можно (но в наше время многие считают, что дешевле поставить ещё один сервер, чем платить за разработку). Логика станет сложнее. Например, запросы, потом мультиплексирование коннектов через какой-нибудь poll/epoll... впрочем, вам наверное хватит и старого доброго select. Потом надо позвать нужные колбэки, чтобы они продолжили работу... Линейность логики кода теряется, это уже не "спросили - дождались - отправили ответ", а паззл из кусочков "получили очередные 1300 байт, осталось ещё 4К, а пока дальше спать... И да, надо сохранить контекст перед сном!".
И вот тут как раз кастомный мультиплексор на корутинах позволяет вернуть логику назад, в исходные "1 поток - 1 запрос". Только это будет уже не честный поток, а "таск". А под капотом, в отдельной папке с исходниками будет весь трэш, раскрывающий новую суть "синхронно читаем ответ БД".
Код остаётся таким же простым, однопоточным и синхронным (но только на внешний взгляд).
Мы примерно так сделали у себя. Сперва заменили синхронное чтение простеньким циклом "пока не вычитали, сколько надо, читаем, сколько дали, потом спим в poll, пока ещё не прилетит". А потом poll заменили на самописный - с той же сигнатурой, что системный, но уже на корутинах. Вся линейность и простота логики осталась. Единственная особенность, которая появилась - задача после такого "синхронного" чтения скорее всего окажется в другом потоке, и это надо учитывать (например, не использовать системный tls. Не мешать корутины с системными примитивами синхронизации, потому что вроде простой паттерн "захватили мьютекс, сделали дело, отпустили мьютекс" начинает неиллюзорно доставлять, если в момент "сделали дело" мы ушли в другой поток...
progman78
29.01.2022 15:56А если большой разброс - уже возникают интересности.
Согласен. У нас нет тяжелых запросов. Разброс от 1мс до 50 причем 1 и 50 крайне редко. Так что в среднем реально 10мс
Переписывать программу на асинхронную - можно (но в наше время многие считают, что дешевле поставить ещё один сервер, чем платить за разработку).
Согласен - 32х ядерный DELL стоит примерно 220-280 евро в месяц. Переписывать сервер будет стоить тысяч 15-20 евро. Так что тут чистый прагматизм - дешевле еще пяток серверов поставить и вытянуть 50 тысяч онлайн чем тратить силы на переписывание и отладку всего этого зоопарка.
Вот если бы изначально писался асинхронный... но тогда была бы совершенно другая история.
progman78
30.01.2022 04:43+1C БД в частности с PostgreSQL проблема еще такого рода ( как я вижу ). Количество коннектов к БД лимитировано. У нас, к примеру, 600 штук на все сервисы. Поэтому каждый игровой сервер может только 128 коннектов создать к БД для себя и чтобы еще сайту осталось.
Я не понимаю как 100500 запросов асинхронного сервера пройдут через это убтылочное горлышко?
Насколько мне известно постгрес не умеет асинхронно. Один коннект = один запрос и пока БД ответ не отдаст через этот коннект она запрос не принимает больше.
Прилетело в асинхронный сервак сразу 129 запросов от клиента на авторизацию. Через пулл коннектов к БД сервер каждому выделил по коннекту к БД и туда улетел запрос. Все дружно ждут. А 129й ждет когда кто то освободит коннект к БД. Получается так? И если это именно так то какая разница у нас синхронный сервер с 128ю потоками и 128ю коннектами к БД или асинхронный но все те же самые 128 коненктов к БД ?
progman78
30.01.2022 07:15Upd. тупанул с этим комментом - у постгреса таки есть асинхронные запросы. Очень давно не открывал документацию на libpq
Но там куча камней подводных оказывается. Так PQsendQuery не блокирует поток но все равно блокирует коннект к БД. Второй раз в этом же коннекте PQsendQuery не послать пока не прочитать ответы предыдущего запроса через PQgetResult.
Не знаю если честно возможна ли истинно асинхронная работа с постгресом в одном коннекте и множеством одновременных запросов.
antoshkka Автор
30.01.2022 11:18Всё так. Корутины и асинхронность - это не серебряная пуля для всех проблем, а лишь возможность экономить CPU на IO-bound приложениях.
В случае баз данных фреймворки зачастую предоставляют другие способы улучшить это место. Например userver использует бинарный протокол для общения с PostgreSQL (не тот, что по умолчанию в libpq), автоматическое превращение всех запросов в prepared statements, динамическое управление пулами; на подходе использование порталов и pipelining. Разумееется это всё полностью не убирает бутылочное горлышко, но позволяет его немного расширить

kaegoorn48
28.01.2022 10:08+1Очень интересная статья.
Антон, а подскажите, пожалуйста, вот есть микросервис, обрабатывающий асинхронно вызовы rpc и выполняющий запросы к БД также асинхронно. Насколько целесообразно реализовывать многопоточность, пусть даже на корутинах, lock-free и т.д. по сравнению с пулом однопоточных микросервисов и балансировщиками перед ними? Есть ли профит с точки зрения производительности?
antoshkka Автор
28.01.2022 10:54Это очень интересный вопрос.
В теории, так можно жить и даже можно сдлеать интересные оптимизации, экономящие CPU. Приблизительно так работает Python3, где основная часть программы однопоточная, а масштабирование происходит через запуск новых инстансов приложения.
На практике так жить зачастую не получается из-за несовершенства ОС (не для всего есть асинхронные вызовы) и из-за несовершенства драйверов к различным базам данных и протоколов передачи данных. В том же Python3 драйвер для gRPC порождает свой собственный поток.
С идеальным однопоточным режимом есть и недостаток - да, можно немного оптимальнее загрузить CPU, но страдает latency. Если к вам приходит запрос, обработку которого можно разложить на две несвязанные задачи по 400ms, то в однопоточном режиме вы вернёте ответ через 400ms+400ms. В многопоточном режиме задачи обработаются на разных потоках и ответ вы вернёте через 400ms.

mvy
28.01.2022 14:22Может быть стоит сделать backoff в вашем мьютексе? Глядишь и не все так плохо будет на 4 потоках и выше.
antoshkka Автор
28.01.2022 15:31Если все потоки яростно дерутся за общий ресурс то во всей красе проявляется закон Амдала:
Допустим 50% времени поток проводит в критической секции. Соответственно на системе с 100 ядрами вы получите ускорение 1÷(0.5 +(0.5÷100)) ~= 2. Всего в 2 раза быстрее будет работать ваш код на 100 ядерной машине, чем на одноядерной.
Ускорение мьютекса тут ситуацию не улучшит, нужно менять сам алгоритм, например использовать специальные очереди, так же предоставляемые фреймворком.
Если же в критической секции приложение проводит мало времени, то шансы столкновения сразу множества потоков на мьютексе малы и мы получаем картину из верхней части таблички. Со временем, мы наверное займёмся оптимизацией этого случая и сделаем некий backoff, но пока что это не в приоритете.
tabtre
28.01.2022 17:40Прошу прощения за наверное такой нубский вопрос, на С++ писал давно и немного, но почему тут lock_waiters_ написан без this->
void Mutex::lock() { ... impl::MutexWaitStrategy wait_manager(lock_waiters_, current); ...}
Это вроде поле структуры:struct Mutex { ... private: std::atomic<Coroutine*> owner_{nullptr}; WaitList lock_waiters_; };
klirichek
29.01.2022 11:03+1Долго не мог понять, при чём здесь userver. Потому что читал его как user-ver...
А насколько легко подружиться с gRPC, если не погружаться в потроха и не переписывать гугловый движок?
Вроде навскидку кажется, (если натягивать на такую модель мьютекса и делать по аналогии) - для корутины это как Sleep. В в AfterASleep запульнули данные в grpc и ждём ответа (как-то уже средствами grpc как "чёрного ящика", синхронно или асинхронно). А как получили ответ экспозим его в BeforeAwake и пробуждаем корутину. Кажется должно получиться...
Тут тоже, конечно, смущает факт, что "я тут оптимальное число потоков в тредпуле выделил, а какой-то гугл в своём чёрном ящике ещё чего-то откусил", но что поделать...
antoshkka Автор
29.01.2022 11:42+1В целом приблизительно всё так и дружится.
Но помимо интеграции с корутиновым движком нужны ещё метрики, логи, плагин для кодогенерации gRPC C++ кода, документация... В общем, работы на пару-тройку месяцев

svr_91
Насколько я помню, в c++ корутинах есть глюки с захватом переменных в capture list.
Где-то я слышал (и согласен с этим), что мьютекс с таймаутом - это антипаттерн.
Интересно, а есть ли смысл вообще изобретать асинхронный мьютекс, если во время выполнения программы почти наверняка будет выделение памяти, что по сути тот же самый мьютекс
antoshkka Автор
Можете подробнее рассказать, о каких именно глюках речь?
Что касается выделения памяти - то всё зависит от вашего аллокатора. Современные аллокаторы внутри как правило lock-free или имеют крайне низкий contention на мьютексах. А вот в пользовательском коде асинхронный мьютекс крайне полезен - особенно когда у пользователей фреймворка получается критическая секция приличных размеров. Проверено обстрелами :-)
svr_91
Вот здесь обсуждалось
https://habr.com/ru/post/493808/#comment_21428868
antoshkka Автор
Да, это место в корутинах аналогично поведению при использовании
std::thread. Чтобы захватить объект по копии надо использовать[*this]Однако с корутинами этих проблем наоборот становится сильно меньше, по сравнению с обычным асинхронным кодом, так как меньше callbacks.
Код с корутинами:
Аналогичный код без корутин:
KanuTaH
Тут насколько я понимаю этот
Asyncделает себе копию переданной лямбды и держит эту копию (вместе со всем списком захвата) живой до тех пор, пока не завершится. В этом случае проблем быть не должно.antoshkka Автор
Да, именно так
Kelbon
Нет никаких глюков, скорее всего речь о том, что захватываются переменные не в корутину, а лямбду которая создаёт корутину. А корутина хранит естественно только то, что передали ей в аргументах. Так что это не понимание что происходит, а не глюки