

Человек всегда мечтал знать о том, что находится под землёй — в средние века для этого служило такое искусство как лозоходство, и с помощью него искали подземные источники и хранилища воды. Далее, уже в XX веке, был придуман прибор под названием «металлодетектор» или «миноискатель». Этот прибор позволяет снабдить глаза человека своеобразными очками, позволяющими ему видеть сквозь толщу Земли.
Первый металлоискатель был изобретён в начале XX века в США. Первоначально прибор разрабатывался для предотвращения воровства металлических деталей с заводов. Впоследствии, польза металлоискателей была замечена и в других отраслях, как промышленных, так и военных. Первоначально эти аппараты были чересчур велики и неудобны для массового использования, но со временем были разработаны и более компактные модели.

Источник картинки: www.mdregion.ru
Уже гораздо позднее концепция «земляных очков» ещё более прогрессировала, и появился «георадар» — устройство, которое позволяет не просто обнаружить предметы под землёй, но и буквально видеть их контуры, а также глубину залегания. Именно об этом интересном устройстве мы и поговорим в этой статье.
Георадар по своей сути является радиолокатором, для которого исследуемой средой может быть земля, грунт (отсюда наиболее распространённое название), пресная вода, горы.
Георадар представляет собой высокочастотный (от 10 МГц до 1000 МГц) метод электромагнитных волн высокого разрешения для получения изображений грунтов и наземных структур. Антенна используется для передачи и восстановления радиолокационных импульсов, генерируемых генератором импульсов. Затем возвращённый импульс обрабатывается для получения изображений профиля почвы. Основные геотехнические применения — это получение изображений профиля почвы и определение местоположения захороненных объектов. Георадар обеспечивает непрерывное разрешение изображения почвенного профиля с очень небольшим нарушением почвы. GPR не подходит для влажных глин и илов с высокой проводимостью (0,15 миллиом/м). Разрешение георадара уменьшается с глубиной.
Как заявляют профессионалы, успех исследований с помощью георадара на 30% зависит от аппаратной и на 70% от программной составляющей. Высокая роль программного обеспечения и соответствующих баз, объясняется тем, что именно программное обеспечение, благодаря своим алгоритмам позволяет ему достаточно точно идентифицировать профиль того, что видит прибор, с использованием готовых баз, предварительно сохранённых, исследованных видов подземных компонентов (песок, глина, камни, вода и т.д.).
▍ Конструкция георадара
Современный георадар представляет собой сложный электронный прибор, компоненты которого выполняют следующие функции:
- формирование импульсов, излучаемых передающей антенной;
- обработка сигналов, поступающих с приёмной антенны;
- синхронизация работы всей системы.
Таким образом, георадар состоит из трёх основных частей: антенной части, блока регистрации и блока управления.

Автор: Горлов Алексей Юрьевич — собственная работа, CC BY-SA 3.0. Источник
Антенная часть включает передающую и приёмную антенны. Под блоком регистрации понимается ноутбук или другое записывающее устройство, а роль блока управления выполняет система кабелей и оптико-электрических преобразователей.
Зачастую, для удобства перемещения по поверхности земли — георадар выполняется в виде тележки со смонтированной на ней аппаратурой:

Автор: The Charles Machine Works. Источник
▍ История развития георадара
Разработка георадаров велась в разных странах Европы, Америки, России, СССР. На основе экспериментов в натуральных условиях исследовались методы построения специализированных радиолокаторов для зондирования сравнительно тонких высокопоглощающих сред.
Использование ударного возбуждения антенны позволило оценить электрические характеристики морского льда на разных частотах. Впервые радиолокационное измерение толщины морского льда проведено в 1971 году с помощью предложенного М. И. Финкельштейном в 1969 году метода синтезируемого видеоимпульсного сигнала. Этот метод применён в первом промышленном радиолокационном измерителе толщины морского льда «Аквамарин».
В 1973 году с борта самолёта была доказана возможность обнаружения и измерения глубины водоносных слоёв в пустынных районах Средней Азии. Использовался разработанный в РИИГА радиолокатор с ударным возбуждением антенны импульсами длительностью 50 нс с центральной частотой спектра около 65 МГц. Глубина зондирования оказалась выше 20 м при высоте полёта самолёта 200…400 м. Аналогичные работы были проведены для известняков в 1974 году, для мёрзлых пород — в 1975 году.
Следует указать на использование метода синтезирования апертуры в радиолокационной системе, установленной на борту космического корабля «Аполлон-17», для исследования поверхности Луны. Система была испытана в 1972 году с борта самолёта над ледниками Гренландии на частоте 50 МГц при длительности импульса с линейной частотой модуляции 80 мкс (коэффициент сжатия 128).
Серийные образцы георадаров начали появляться в начале 70-х годов.
В середине 80-х интерес к георадиолокации возрос в связи с очередным скачком в развитии электроники и вычислительной техники. Но, как показал опыт, это развитие оказалось недостаточным. Трудозатраты на обработку материалов не смогли окупиться в полной мере, и интерес к георадиолокации снова упал.
В 90-е годы, когда произошла очередная научно-техническая революция, и персональные компьютеры стали более доступны, интерес к георадиолокации вновь возрос и не ослабел до сих пор.
С конца 90-х годов регулярно проводятся научно-исследовательские конференции, посвящённые этому методу. Издаются специальные выпуски журналов.
▍ Принцип действия
Радары подповерхностного зондирования предназначены для изучения сред-диэлектриков по изменению диэлектрической проницаемости и/или электропроводности. Чаще всего георадары применяются для инженерно-геотехнического обследования грунтов и неразрушающего контроля (неметаллических) строительных конструкций.
Принцип действия большинства современных георадаров тот же, что и у обычных импульсных радаров. В изучаемую среду излучается электромагнитная волна, которая отражается от разделов сред и различных включений. Отраженный сигнал принимается и записывается георадаром.
В настоящее время большинство серийно производимых радаров можно сгруппировать в несколько подтипов, которые отличаются основными принципами функционирования:
-
Стробоскопические георадары:
Такие радары испускают преимущественно импульсы с небольшой энергией, около 0.1-1 мкДж, но таких импульсов испускается довольно много 40-200 тысяч импульсов в секунду. Используя стробоскопический эффект, можно получить очень точную развёртку — радарограмму во времени. Фактически усреднение данных с огромного числа импульсов позволяет существенно улучшить отношение сигнал/шум. В то же время, мощность в 0.1-1 мкДж накладывает серьёзные ограничения на глубину проникновения таких импульсов. Обычно такие радары используют для глубин зондирования до 10 метров. Однако, в отдельных случаях «пробивная» способность достигает более 20 метров. -
Слабоимпульсные радары:
Такие радары испускают существенно меньше 500—1000 импульсов в секунду, мощность каждого такого импульса уже существенно выше и достигает 100мкДж. Оцифровывая в каждом таком импульсе одну точку с разным сдвигом от начала, можно получить радарограмму во временной области без стробирования. В то же время такой аппарат позволяет снимать около одной радарограммы в секунду и практически не позволяет использовать усреднение для улучшения отношения сигнал/шум. Это позволяет получать радарограммы с глубин в десятки метров, но трактовать такие радарограммы может только специально обученный специалист. -
Сверхмощные радары с разнесёнными антеннами:
Такие радары испускают только несколько импульсов в секунду, но энергия импульса достигает 1-12 Дж. Это позволяет значительно улучшить отношение сигнал/шум и динамический диапазон георадара и получать отражения от многих глубинных слоёв или работать на тяжёлых и влажных грунтах. Для обработки радарограмм требуется специальное программное обеспечение, которое производители таких георадаров поставляют в комплекте с георадаром. К недостаткам мощных радаров можно отнести опасность радиооблучения биологических объектов и значительную (до 2-3 метров от поверхности) «мёртвую» зону. Существует альтернативное мнение по вопросу радиооблучения биообъектов сверхмощными георадарами. Обычный георадар снимает одну запись за множество запусков (это связано с проблемами оцифровки сигналов). Сверхмощный — делает всего несколько запусков в секунду, (это привело к тому, что для этих георадаров пришлось разрабатывать систему оцифровки сигналов не связанную со стробоскопическим преобразованием). Если подсчитать излучённую георадаром энергию за секунду, получится что обычный георадар стреляет очень часто, но небольшими импульсами. А сверхмощный выдаёт большой по амплитуде импульс, но делает это редко. Разница параметров такова, что во втором случае на биообъект падает меньше излучённой энергии.
Для всех вышеперечисленных типов радаров имеется возможность использования одного или нескольких каналов. В этом случае условно можно разделить все эти георадары на ещё несколько классов:
-
Одноканальные георадары:
В таких георадарах имеется один передатчик и один приёмник, большинство компаний производителей георадаров имеют одноканальные георадары. -
Многоканальные парные георадары:
В таких георадарах имеется несколько пар приёмник-передатчик, так что съёмка геопрофиля с каждого канала происходит одновременно. Такие системы распространены у многих зарубежных производителей, которые специализируются на геопрофилировании дорожных покрытий. Такая система фактически содержит несколько одноканальных георадаров и позволяет значительно уменьшить время профилирования. Недостатком таких систем является громоздкость (они значительно больше одноканальных) и высокая стоимость. -
Многоканальные георадары с синтезированной приёмной апертурой:
Это наиболее сложный тип георадаров, в котором на одну передающую антенну приходится несколько приёмных, которые синхронизированы между собой. Фактически такие георадары представляют собой аналог фазированной антенной решётки. Основным преимуществом таких систем является гораздо более чёткое позиционирование объектов под землёй — фактически они работают по принципу стереозрения, как если бы у радара было бы несколько глаз-антенн. Основным недостатком таких систем является очень сложные вычислительные алгоритмы, которые необходимо решать в реальном времени, что приводит к использованию дорогих электронных компонентов, обычно на основе FPGA и GPGPU. Обычно такие системы применяются только в сверхмощных георадарах с разнесёнными антеннами. В то же время, такие системы более помехоустойчивы и позволяют получать наиболее точную картину распределения диэлектрической проницаемости под землёй.
▍ А существуют ли самодельные конструкции?
В настоящее время большое количество любителей стараются удешевить конструкцию георадара и существуют даже проекты, где достаточно подробно объясняется конструкция, схемотехника, принцип работы.
Например, вариант георадара за 600 евро (страшные деньги по нынешним временам, но всё равно меньше – чем покупной )

Источник картинки: hackaday.com
Создатели выложили подробное описание, как собрать такой радар в образовательных целях.
Итак, что же он из себя представляет?
- Это устройство является FMCW-радаром:
«Радиолокатор непрерывного излучения с частотной модуляцией (Frequency-Modulated Continuous Wave radar = FMCW radar) — это особый тип радиолокационных датчиков, непрерывно излучающих мощность, как и обычный радиолокатор непрерывного излучения (CW-Radar). Но в отличие от CW-радиолокатора в FMCW-радиолокаторе применяется изменение рабочей частоты во время измерения, то есть излучаемый сигнал модулируется по частоте (или фазе). Модуляция сигнала по частоте или фазе даёт возможность выполнять измерения длительности интервалов времени.
- Допускает использование модульных подсистем, позволяющих заменять компоненты для реализации конструктивных альтернатив
- Частота развёртки: fmin=1,3 ГГц, fmax =2,6 ГГц
- Возможность установки меньшего интервала для используемых частот
- Выбор формы волны модуляции
- Выбор периода волны модуляции
- Низкая цена (для нас это условно )
Недостатком радиолокаторов непрерывного излучения без частотной модуляции является невозможность измерения дальности цели, обусловленная отсутствием опорных точек в структуре сигнала, обеспечивающих оценку задержки принятого сигнала относительно излученного. Этот недостаток устраняется частотной модуляцией излучаемого сигнала. При этом частота излучаемого сигнала периодически увеличивается или уменьшается. В принимаемом эхо-сигнале изменение частоты получает задержку Δt (за счёт распространения в пространстве до цели и обратно) как и при использовании метода импульсной радиолокации. Однако если в импульсном радиолокаторе время задержки измеряется непосредственно, то в FMCW-Radar для этого оцениваются различия в фазе и частоте между излучённым и принятым сигналами.
Основные особенности FMCW-радаров:
- возможность измерения очень малых расстояний до цели (минимальная измеряемая дальность сопоставима с длиной излучаемой волны);
- возможность одновременного измерения дальности до цели и её относительной скорости;
- очень высокая точность измерения дальности;
- обработка сигналов после смесителя выполняется в диапазоне низких частот, что существенно упрощает реализацию схем обработки;
- лучшая безопасность из-за отсутствия импульсного излучения с большой импульсной мощностью.
Основные принципы измерений при помощи FMCW-радиолокатора:
- Измерение дальности выполняется путем сравнения частоты принимаемого сигнала с эталоном (как правило, непосредственно с частотой излучаемого сигнала).
- Длительность излучаемого сигнала T существенно больше, чем интервал приёма эхо-сигнала для диапазона дальностей, подлежащих измерению.»
Основная блок-схема устройства выглядит так:

Источник картинки: gpradar.eu, презентация Guide for building a GPR radar for educational use
Чтобы увеличить интерактивные функции и универсальность форм модуляции, генератор аналоговых функций заменён на универсальную плату микроконтроллера (MCU) mbed LPC1768 с высокопроизводительным ядром ARM Cortex-M3 (на картинке также показаны напряжения питания компонентов):

Источник картинки: gpradar.eu, презентация Guide for building a GPR radar for educational use
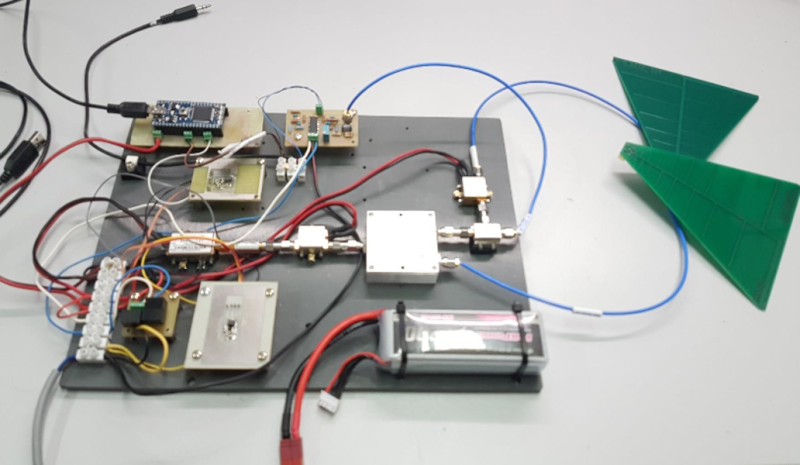
Вся система в частичном сборе:

Источник картинки: gpradar.eu, презентация Guide for building a GPR radar for educational use
Предлагаемый авторами мануал по сборке этого радара — отличается весьма проработанной детализацией, в частности, имеются таблицы всех компонентов с номиналами! И даже подробная инструкция по соединениям.
Для своей работы система требует следующих программных компонентов:
- Операционная система Arm Mbed OS, которая включает в себя пакет Cortex Microcontroller Software Interface Standard (CMSIS) и предоставляет C/C++ SDK c соответствующими библиотеками, которые можно использовать, зайдя на веб-сайт os.mbed.com и выбрав раздел «Компилятор», после бесплатного входа в аккаунт;
- Дистрибутив Anaconda — можно загрузить с веб-сайта: https:// www.anaconda.com/download. Anaconda предоставляет рабочее пространство Spider, но сначала требуется скачать Python 3.6 documentation, который включает Tkinter, с веб-сайта www.python.org/downloads
- MbedWinSerial — драйвер для последовательной передачи данных между портом ПК пользователя и платой Mbed, его можно скачать с сайта: https:// os.mbed.com
К сожалению – авторы не выложили прошивку платы Mbed, поэтому остаётся или разрабатывать её самостоятельно или попробовать связаться с ними. Проект весьма интересный своей проработанностью и наличием практически полной документации в сети.
Альтернативным рассмотренному выше проекту является проект на базе ручной рации Baofeng! (хм, да да, та самая, которая за 3000 рублей была совсем недавно!).

Источник картинки *oGPR — Open Ground Penetrating Radar («Открытый проект георадара»- если по-русски)
Управляется по wifi, построен на Raspberry PI и представляет собой колёсный ровер с антенной (в качестве привода колёс-электростеклоподъемники от авто): рация Baofeng VHF/UHF диапазонов — служит в качестве генератора сигналов, контроллер представляет собой просто оптоизолятор, а контроллер коммутатора представляет собой шестнадцатеричный инвертор 7404. Подробнее ознакомиться с проектом можно тут.

Источник картинки: hackaday.com
Что же касается ПО, для расшифровки результатов, то можно попробовать воспользоваться бесплатными Open Source проектами, такими как RGPR или GPRPy.
Но, всё это как-то сложновато, не так ли? ;-) А что если, собрать георадар на Ардуино? «Почему бы и нет» — как бы говорит следующий проект, который представляет собой вот что:
- Стоимость менее 300 $
- Полученные данные можно визуализировать на борту в режиме реального времени, а также сохранять и передавать на ПК для дальнейшей обработки;
- В цифровой части используется плата Arduino Mega 2560.
- Встроенная визуализация использует экран LCD для Arduino Mega 2560;
- Аналоговая секция изготовлена на заказ;
- Диапазон частот 323 МГц — 910 МГц.
Этот проект собран на основе Arduino Mega 2560 и антиподных антенн Vivaldi, типа направленной антенны. Всё смонтировано в небольшой тележке, которую можно катить по земле.


Источник картинок: hackaday.com
Переключатель, прикреплённый к колёсам, запускает радар через равные промежутки времени, когда катится, и радар излучает сигнал и прислушивается к отражениям в каждой точке. Он работает в диапазоне частот от 323 МГц до 910 МГц, а небольшой график того, что он «видит», отображается на ЖК-экране, сопряжённом с Arduino.
Использование этого инструмента позволяет увидеть различную плотность материалов, находящихся под землёй, а также их глубину. Это может быть очень удобно, когда вы начинаете проект раскопок — для обнаружения слоёв горных пород или подземных коммуникаций перед раскопками.
В завершение хотелось бы сказать следующее: многие компоненты георадара являются заменяемыми и возможно строить свои собственные конструкции – от этого будут зависеть только его параметры: глубина просмотра, разрешение, скорость работы и т.д. и т.п. Некоторые предлагают даже использовать в качестве радара – обычный wifi! Разумеется, это накладывает определённые ограничения – т.к. его возможно будет использовать только вдали от населённых пунктов, чтобы избежать помех.
Да, использование «неканонических» типов излучателей некоторым образом ограничит возможности системы, но, с другой стороны: у каждого ли есть личный экскаватор, чтобы по каждому «о, что-то интересненькое на глубине в 2 метра» – начать копать?
Кроме того, мне кажется было бы достаточно интересно использовать дрон в качестве летающего «сканера глубин», с малым проникновением, непрерывным излучением сигнала малой мощности и постоянной отсылкой получаемых данных – на стационарный компьютер с аналитическим ПО.
Тем более что, как было сказано ранее — «самолётное исследование» уже бывало в истории. А в настоящий момент — проводятся даже космические:

Комментарии (15)

andrey_ssh
30.03.2022 12:56... по изменению диэлектрической проницаемости и/или электропроводности.
А есть ли возможность получить от радара электропроводность грунта в численном виде?

prygoff
31.03.2022 09:22+1Для этого существует подвид методов "вызванной поляризации" (ВП) или IP/Resistivity, когда через два электрода пропускается разнофазовый постоянный ток с прямоугольными импульсами и другой массив электродов "слушает" отклик. За разные окна "распада" отвечают различные проводники. И хотя метод построен на способности некоторых структур удерживать заряд, на финальной картинке мы видим именно проводник. Очень хорошо, когда цель напрямую ассоциирована с проводимостью. Например, сульфиды - это всегда признаки руд цветных металлов. Хуже, если полно графита и тут приходится очень кропотливо обрабатывать данные по тем самым временным окнам, благо, графит - очень контрастно выделяющийся проводник. А иногда графиты ассоциированы, например, с урановой рудой и нашёл графит = нашёл уран. Так, например, в Атабаске, Канада. Данные Ip/ Resistivity могут быть как 2D так и 3D - все зависит от количества и конфигурации массива электродов, а также вычислительных способностей. Для некоторых сложных систем, для обработки данных, часто даже бронируется время на суперкомпьютере.
andrey_ssh
31.03.2022 09:35Признаки руд не нужны. Достаточно среднего сопротивления грунта в окрестностях.
Схема с электродами давно известна, но не работает, потому что всем лень даже два забивать. А ещё требует квалификации, чтобы забить их правильно и мотивации, чтобы не "забить" на правильную забивку.
А георадар привлекателен тем, что достаточно приехать на место и нажать на кнопку.
Это больше управленческая проблема чем техническая.
prygoff
31.03.2022 09:41Ну, если не руды ищешь, то их признаки и не нужны - что ж с этим спорить то? Другое дело, когда речь идёт не о близком к поверхности слое с иной плотностью / отражающей способностью , а о глубоких залеганиях. Сверхпроводимый трехосевой сенсор, который называют ещё Z-field sensor, "видит" проводники на глубине 2-3 км. Разные вещи для разных целей - с трудом себе представляю "самопальщиков", которые могут себе позволить такие исследования... Я вообще, от геофизики, но металлоискатель у меня в хозяйстве есть! ;)

{kind=link}
{kind=link}
{kind=link}

iShrimp
30.03.2022 20:41Во-первых, как уже заметили, георадары бывают импульсные и чирповые.
У импульсного радара принцип действия прост: подали импульс - получили отклик. Но при своей простоте такая схема имеет ряд недостатков - импульсы являются широкополосной радиопомехой, а приёмный тракт также и сам чувствителен к помехам. Для устранения помех нужно усреднять принимаемый сигнал.
ЛЧМ-радар - менее восприимчив к посторонним сигналам; может быть использован как нелинейный локатор (по уровню высших гармоник можно косвенно судить о химическом составе объекта); но требует более сложной математики.
На Хабре есть две интересные статьи о разработке георадаров.
Во-вторых, существуют и другие способы сканирования земли — например, электрическая резистивная томография (википедия). На участке устанавливают массив электродов, попарно измеряют сопротивление между ними и строят двумерную карту сопротивлений.
Ritchizh
31.03.2022 00:00+6К сожалению – авторы не выложили прошивку платы Mbed
Здравствуйте! Спасибо за обзор проекта.
Прошивка выложена мною на гитхаб: https://github.com/Ritchizh/GPR_Project_2017
Не опубликованы файлы для разводки плат и Матлабовская программа для визуализации данных.

ru_vlad
31.03.2022 00:35Интересно, а можно с их помощью воду находить, для колодца?
prygoff
31.03.2022 09:36Ну, георадар, по принципу своему для таких целей будет несколько "жирноват". Классика на воду - это электрические методы, в частности, сопротивление (сопротивляемость - resistivity). Тут всё примитивно с точки зрения замеров, но ад наступает в сборе данных, где важен массив электродов, а далее - обработка и сведение всего воедино. Универсальной штуки, которая бы показывала "вот там вода", увы, нет. Тут подробнее: https://wiki.seg.org/wiki/Electric_resistivity_methods

GomelKiev
31.03.2022 10:02Можно ли этим прибором искать провода и трубы в бетонных стенах? Или есть какой нибудь другой прибор, мощнее чем stud finder?

tormozedison
31.03.2022 13:54Встречал точку зрения, что Маркони был несколько не в курсе, через что могут распространяться электромагнитные волны, а через что - нет. И в одном из патентов предложил пропускать их сквозь почву в тоннели, подземелья.
Roum15
ага, конечно, все только про них и думали)
wilczek
Вы не поверите, но именно поиск подземных коммуникаций был одним из драйверов развития подповерхностных радаров. Как раз после широкого внедрения пластиковых труб. Если не ошибаюсь, в Детройте была утеряна документация и они там за голову схватились, когда вдруг осознали, что закопанную пластиковую трубу обнаружить не так просто.
Второй, и главный, надо признать, драйвер - да, обнаружение пластиковых мин. Лет 20 назад была исключительно популярная тема, особенно в академических кругах. Но тут выяснилось,что теория одно , а практика другое и достичь заданной вероятности обнаруженя не удается и, вероятно, не удастся, в частности, из-за малого градиента, т.е., низой контрастности радиоизображения, крайне высокой зависимости отражаемости слоев от влажности и еще кучи всякого. И интерес угас, как-то.
Format-X22
Я когда газопроводы проектировал 15 лет назад - мы ленту металлическую с трубой закапывали - чтобы металлоискателем можно было легко найти.