
DIY разработка. Ошибки и грабли. Возможные сферы применения
Я покажу свой опыт как сделать автономный гусеничный робот, не раздувая щеки и бюджет. Задача оказалась достаточно интересной, а в процессе реализации я собрал все грабли, которые cмог.
Гусеничное шасси
Мне помог с корпусом и шасси Алексей Беляков, с которым вместе мы сотрудничаем давно и писали статью о промышленном дизайне.

Примерная схема компоновки с которой начали работу и подбор комплектующих. Так как раздувать бюджет не хотелось нужно было выбирать из комплектующих доступных в продаже. Приступили к выбору гусениц.

Корпус

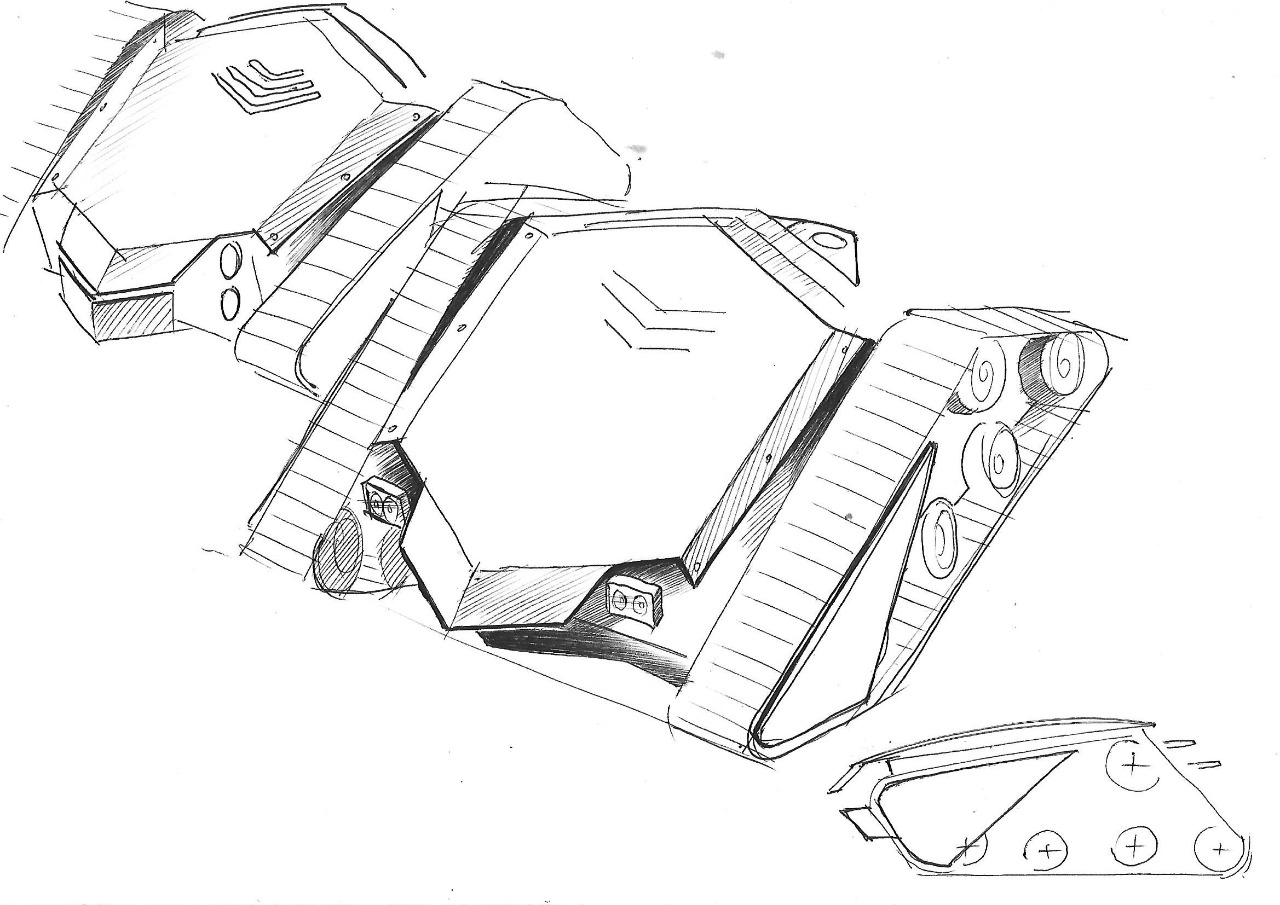
Как сказал бы мой внутренний гуманитарий "Общий вид должен быть агрессивный, напористый, технологичный, транслирующий уверенность и стремление к решению задачи, демонстрирующий инновационную начинку робота". Кроме эстетической стороны, должна быть возможность быстрого прототипирования и перехода к вакуумной формовке при производстве в дальнейшем. Эскизных вариантов было большое количество, глаза разбегались и хотелось сделать все.
Другие варианты дизайна

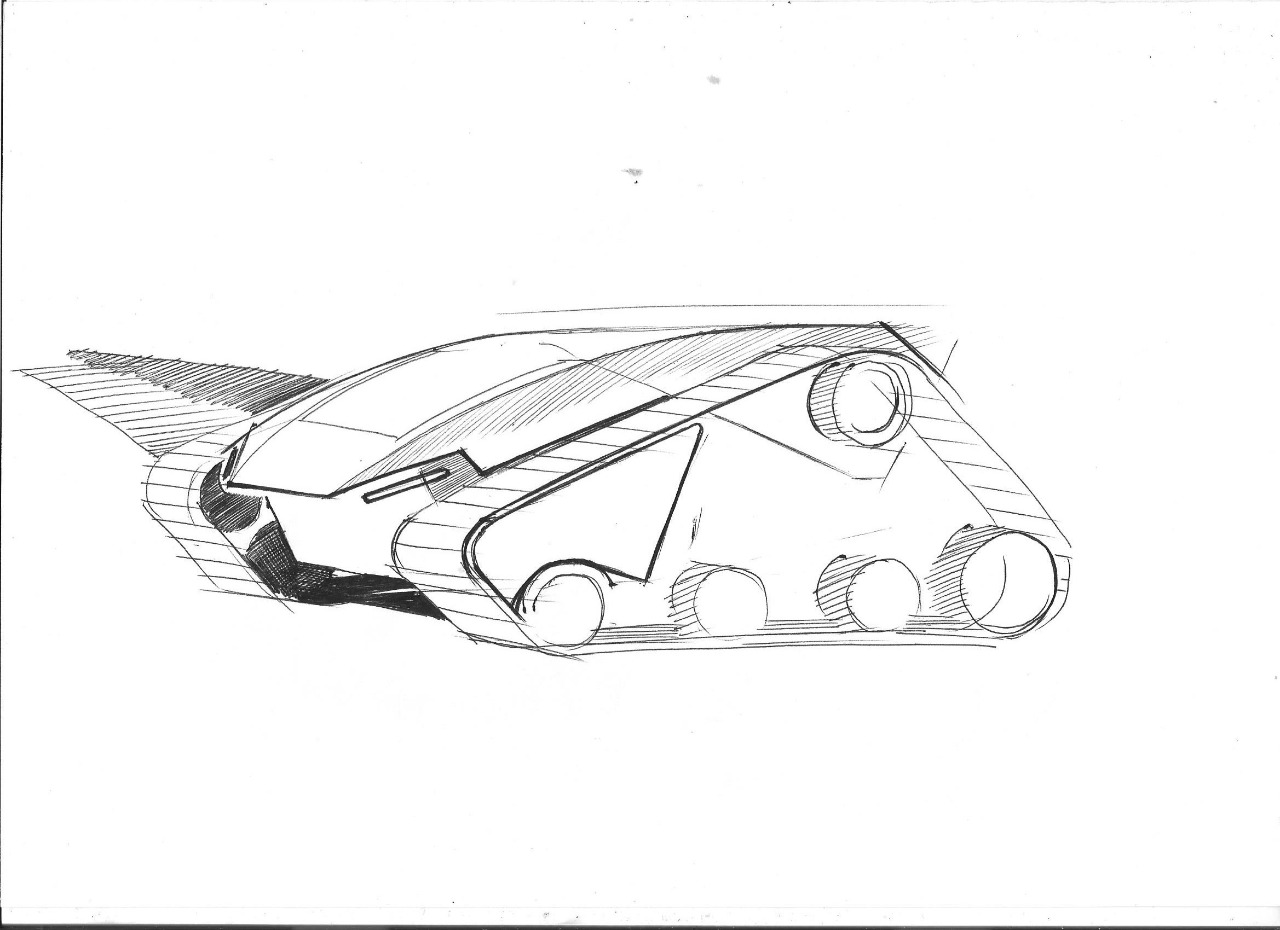






В итоге была выбрана концепция, по которой проектировали корпус.

Моторы и контроллеры
Изначально планировал использовать BLDC моторы. Есть большой опыт в настройке контроллеров Kelly, писал об этом статью. Так как хотелось иметь запас по мощности я решил использовать по мотору 1кВт на каждую ось. Напряжение я решил выбрать 48В, так как для этого напряжения есть огромное количество доступных контроллеров, BMS. Моторы с Али MY1020

Так как в приоритете высокий момент решил использовать редуктор с большой степенью редукции 1:10 и более. Первые опыты с двухступенчатым цепным редуктором не увенчались успехом.

Хотелось мотор в закрытом корпусе от грязи, воды и пили, я выбрал мотор-редукторы с червячным приводом, забегая вперед скажу, что это не самое лучшее решение в плане КПД, но это рабочий вариант. Очень долго искал бюджетный, в итоге выбрал NRV в фирме Подольск Привод. Для того, чтобы соединить мотор и редуктор необходимо было выточить вал и муфту.


Батарея
Батарею решено было сделать из призматиков LiFePo4 по 50А*ч. Самый экономичный и неприхотливый вариант с огромным количеством недорогих BMS и возможностью работать при температуре ниже 0.

Плата управления
Спроектировал плату управления в EasyEDA, там же и заказал.

На плате управления:
микроконтроллер Atmega, чтобы от православной ардуины далеко не отходить;
Гребенка для связи с Jetson nano на будущее;
Управление моторами и считывание показаний энкодеров через опторазвязки;
Реле для управления навесным оборудованием.
Разъемы для подключения приемника радиоуправления
Разъем для соеднинения BeagleBone компьютера.
И естественно, с первого раза все на перемычках, где-то дорожка не туда пошла, где-то что-то забыл. Это как синяя изолента при прототипировании на удачу.

Ardupilot и Mission planer
Управление платформой с пульта дистанционного управления хоть и весело, позволяет закрыть Гештальт и залечить детские травмы, но не так технологично как автономный робот.
Для решения задач патрулирования или проезда по маршруту можно использовать ROS, но самым простым вариантом является использование Ardupilot, я писал статью о настройке.

С BeagleBone мы получаем два RC-канала, для левой и правой гусеницы, вся остальная магия происходит внутри Ardupilot, там же и настройки. BB создает точку WiFi, цепляясь к ней мы можем управлять роботом еще и с джойстика и получать телеметрию.
Использование радио-модулей, например Holybro позволяют получать данные и управлять роботом на расстоянии около 1000метров. Для большего радиуса можно использовать ZigBee Pro.

Во вкладке Flight plan создаем маршрут, загружаем по WiFi в робота и отправляем его по маршруту.

Робот едет на испытания

Ко мне обращались из нескольких организаций с потребностью в автономном роботе или операторозависимой гусеничной платформе. Речь шла о роботе для передвижения легкомоторных самолётов и вертолетов из ангара, автономный робот для обработки полей от борщевика, рое роботов для передвижения мишеней на полигоне.
Гусеничная платформа не цель, а скорее средство. Это лишь способ доставить навесное оборудование решающее определенные задачи. Наличие платформы с высокой проходимостью и возможностью удаленного управления позволяет сфокусироваться. Готов к сотрудничеству и решению интересных задач. Если Вам интересно делать роботов, Вы готовы учиться новому - напишите мне.
Комментарии (19)

Javian
31.08.2022 05:10+2off Не вижу смысла в гусеницах на покрытии предназначенном для движения самолетов и вертолетов. В этом случае колеса удешевили бы и упростили конструкцию шасси.

starfair
31.08.2022 09:13А как же снег или гололёд? Исключая шнеки, это до сих пор самый проходимый в таких ситуациях движетель, насколько я в курсе.
Javian
31.08.2022 09:52Имхо если снег и гололед на аэродроме, то этот аэродром не подготовлен для работы и полеты будут запрещены.
starfair
31.08.2022 10:01Ну, так можно навесить грейдер и расчищать тот же снег. Если речь идёт о малых аэродромах. На больших, такой робот и не нужен, в общем то. Получится достаточно универсальный помощник на таком аэродроме!

vladislav_smirnov
31.08.2022 20:41+1Могу предположить, что при той же массе, колесный вариант будет обладать меньшим сцеплением. То есть для буксирования того же груза потребуется либо увеличить массу и мощность, либо привод на несколько осей. И тот и другой вариант выглядят сложнее и дороже

brdm
01.09.2022 17:22+1Бронетехника на асфальте- это как корова на льду. Всё зависит от того какая поверхность: на мягких грунтах предпочтителен гусеничный движитель, на хорошо несущих грунтах- колёса.

kirichoar
01.09.2022 19:47+1Только больше 3х осей тогда: при меньшем количестве сцепление с грунтом лучше у гусениц. ВПП для легкомоторных самолетов часто представляет из себя выровненную грунтовую дорогу или просто травянистое поле, на котором срыли кочки и засыпали ямки

axe_chita
31.08.2022 07:47+5Как сказал бы мой внутренний гуманитарий «Общий вид должен быть агрессивный, напористый, технологичный, транслирующий уверенность и стремление к решению задачи, демонстрирующий инновационную начинку робота».
Реально по визуалу шушпанцер получился агрессивный, напористый, технологичный.
Надеюсь что его ждет светлое будущее и новые необычные задачи;)




trunya
31.08.2022 18:36"Как сказал бы мой внутренний гуманитарий "Общий вид должен быть агрессивный, напористый, технологичный, транслирующий уверенность и стремление к решению задачи, демонстрирующий инновационную начинку робота". Кроме эстетической стороны, должна быть возможность быстрого прототипирования и перехода к вакуумной формовке при производстве в дальнейшем. Эскизных вариантов было большое количество, глаза разбегались и хотелось сделать все. "
Могу с уверенностью заявить по ходовой части, что эскизный проект провален.
Грабли на которые наступали на заре танко и тракторостроения разбросаны под вашими ногами, вам лишь нужно на них наступить (найти "подходящее" препятствие или режим движения) чтобы они вам влетели в лоб.
При общей доступности технической литературы (особенно русскоязычной и специализированной) по гусеничным движителям не устаю удивляться изобретателям велосипедов.

alphikk
01.09.2022 14:17Кто знает есть ли подобные проекты в open source? Грубо говоря список что купить, чертежи того что сделать и исходники для софта.

expromt
02.09.2022 06:216 точек спереди это фары? Если так, то зачем они так глубоко утоплены? Это ведь создает большие неосвещенные зоны сверху и снизу.

Mc_Key
02.09.2022 18:48В YT есть канал Robotodatel тоже похожее делает, кит набры имеются разнообразеые.
nochkin
я выбрал мотор-редукторы с червячным приводом, забегая вперед скажу, что это не самое лучшее решение в плане КПДСпасибо за статью и линки. Какие-то ещё варианты были опробованы, которые показали лучше результат в плане КПД и надёжности?