

Роботы уже довольно давно перестали быть исключительно плодом воображения писателей-фантастов. В наши дни те или иные виды роботов используются на заводах, фермах, складах и даже в барах, и ресторанах. Но это не совсем те роботы, которых мы себе представляем. Их тело лишено ног, торса или головы. По сути, их тело это только рука, необходимая для захвата и переноски объектов. Более точное название таких устройств — роботизированные манипуляторы. Дабы эффективно выполнять свою работу, они должны обладать достаточно крепкой хваткой, чтобы не уронить переносимый объект. Однако должна быть и некая степень осторожности, если этот объект хрупкий. Инженеры-робототехники по разному подходят к решению этой задачи, создавая, к примеру, мягкие манипуляторы с датчиками давления. Но все они так или иначе напоминают либо кисть человека, либо клешню краба. А что если вдохновением для внешнего вида такого робота будет нечто, лишенное конечностей как таковых? Ученые из Японского института передовых наук и технологий разработали новый тип роботизированного манипулятора, чей внешний вид и соответствующий функционал напоминают распускающийся цветок розы. Из чего сделан робот, как именно он работает, и насколько он лучше классических манипуляторов? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
По улицам наших городов пока не разгуливают роботы, как в фильме «Я, робот», однако они уже довольно широко применяются в самых разных сферах жизни человека. Очевидно, что в тех или иных условиях работы роботы будут иметь или не иметь определенных, так сказать, запчастей. К примеру, роботы-манипуляторы, работающие на сборочных конвейерах, не нуждаются ни в ногах, ни в голове, как таковых.
Именно манипуляторы, хватающие и переносящие объекты, являются самыми распространенными на данный момент. Учитывая факт такой популярности, поиски методов совершенствования их конструкции и расширения функционала продолжаются и по сей день.
Значимую роль в этом процессе сыграла мягкая робототехника, пытающаяся минимизировать (или вовсе убрать) необходимость в жестком каркасе. Мягкие манипуляторы обеспечивают мягкое прикосновение, широкие возможности настройки и динамическую адаптацию к различным объектам.
Частенько вдохновением для мягких манипуляторов становятся представители флоры и фауны: человек (кисть), венерина мухоловка (листья-ловушки), осьминог (щупальце), слон (хобот) и т. д. Но самым необычным вдохновением является механизм открытия/закрытия лепестков цветов.
Рука большинства мягких роботов пытается сжать объект, чтобы создать контакт с большой площадью, чтобы повысить стабильность хватательного действия. Жестким роботам необходимо провести сложные расчеты, прежде чем крепко и надежно ухватить объект, учитывая ограничения его пальцев (небольшая площадь контакта, жесткий корпус и т. д.). Мягкие роботы лишены этого недостатка благодаря их гибкости и деформируемости.

Изображение №1
В рассматриваемом нами сегодня труде ученые представили новый тип мягких роботизированных манипуляторов, названных ROSE (ROtation-based Squeezing grippEr). Внешний вид робота, как понятно из названия, был вдохновенен цветком розы. Конструкция ROSE проста, первоначальная форма напоминает втулку с обжимным кольцом, но обеспечивает высокое усилие захвата (до 33 кгс), а также отношение полезной нагрузки к весу (около 6812% только для захвата). Одним вращением ROSE может сжать большую часть объекта, попадающего в область, ограниченную втулкой наконечника. Простота механической конструкции обеспечивает высокую масштабируемость, легкость изготовления и высокую надежность. Захваты могут выдержать до 400000 циклов открытия/закрытия, что вполне оптимально для использования в реальных приложениях.
Структура ROSE

Изображение №2
Как уже было сказано ранее, внешняя форма захвата ROSE во время работы напоминает полностью распустившуюся розу, а в закрытом состоянии имеет форму спящей розы (в состоянии покоя). Если какой-либо предмет падает в область, ограниченную лепестком, под действием скручивания/вращения, ROSE может безопасно обхватить и удерживать его (2a). В таком сценарии ROSE имеет сходный принцип работы с традиционным манипулятором, наполненном гранулами (видео ниже), поскольку объект покрывается мембраной (мягкий «рукав») и удерживается нормальным давлением.
Демонстрация возможностей манипулятора, наполненного гранулами.
В соответствии с этой идеей смыкание/размыкание руки реализуется цепочкой сложных изгибных деформаций мембраны под действием скручивания. Их можно разделить на три этапа: приближение, подъем и удержание. Сначала ROSE приближается к объекту (2a) и убеждается, что объект находится внутри лепестка. Далее центральное цилиндрическое основание вращается со скоростью ωg, приводя к изгибу рукава, постепенно охватывая объект (2b). Когда основание продолжает вращаться, это увеличивает площадь контакта и давление на поверхность объекта. Следовательно, генерируемая сила захвата на поверхности объекта будет возрастать, что, в свою очередь, поможет ROSE плотно сжать объект (2c). Углы поворота могут быть отрегулированы, чтобы адаптироваться к размеру, форме и массе захватываемых объектов.
Изображение №3
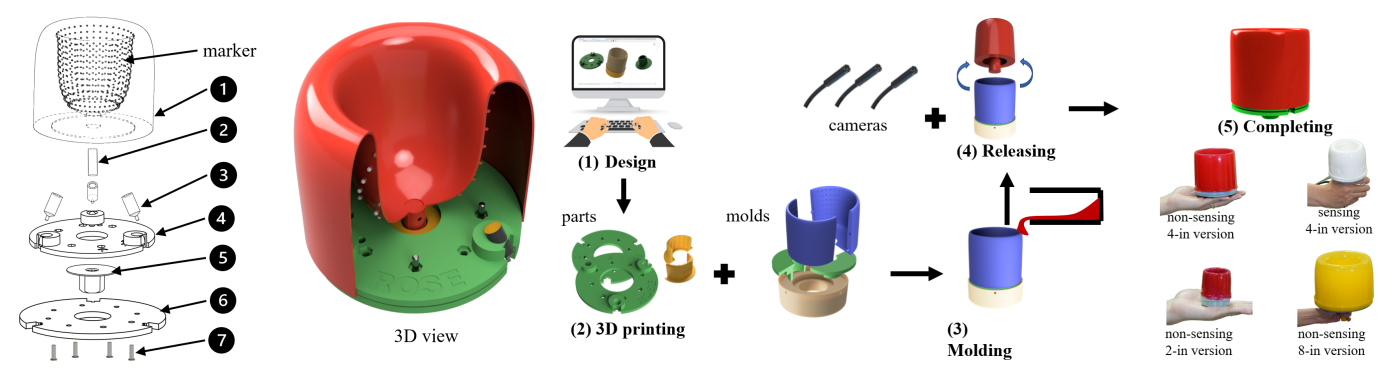
Вместо того чтобы использовать многослойную структуру, состоящую из отдельных лепестков, сшитых вместе, ученые решили упростить конструкцию, использовав единый «лепесток».
Детали конструкции ROSE показаны на схеме выше. Обшивка (1) непрерывно соединяет внешнее кольцо нижнего основания (6) и центр верхнего основания (4), предназначенная для предотвращения концентрированного напряжения на оси вращения. Кроме того, воздушная трубка (2) используется для пропускания воздуха, а нижняя часть обшивки ROSE имеет форму круглого обода и зажата между верхним основанием (4) и нижним основанием (6) четырьмя болтами (7). Эта сэндвич-структура также создает пространство, за счет чего цилиндр (5), прикрепленный к сердцевине рукава силиконом, может стабильно вращаться в центре захвата. Верхнее основание (6) имеет три держателя для установки дополнительных камер (3) тактильного восприятия на основе зрения.
Моделирование работы ROSE
Поскольку ROSE обеспечивает большую площадь контакта с объектом, давление захвата на поверхности этого объекта значительно уменьшится. В то же время, следует уточнить натяжение тонкого рукава ROSE по отношению к массе предмета. Ниже описаны две упрощенные модели, позволяющие охарактеризовать эти факторы.
Модель сжимающего давления на поверхности объекта
Данная модель строилась на основе четырех допущений:
- захваченный объект имеет сферическую форму;
- внешние силы распределяются равномерно по каждой половине сферического объекта;
- коэффициент трения между объектом и рукавом ROSE k < 1;
- захваченный объект покрыт, по крайней мере, нижней половиной рукава ROSE.

Изображение №4
В этом сценарии внешние силы, действующие на захваченный объект, включают силу тяжести (G), силу трения (F) и силу захвата ® (схема выше). Следовательно, если считать a и m ускорением и весом объекта, динамическое уравнение захваченного объекта можно записать следующим образом:

Силы захвата и трения можно записать, определив их распределение на круглом элементе (диаметр в 2x) объекта, как показано в уравнениях ниже. Стоит отметить, что хотя коэффициент трения k (вдоль направлений) считается постоянным, приложенное давление на единицу длины (линейное давление) каждой половины объекта (pt и pb) различно.

В состоянии равновесия (a = 0), спроецировав все эти силы в вертикальном направлении и используя предположение о симметричном объекте, уравнение 1 можно переписать как:

Фактически линейное давление на верхнюю половину объекта (pt) намного меньше, чем на нижнюю (pb), а k < 1, поэтому уравнение 5 можно записать как:

В результате можно получить:
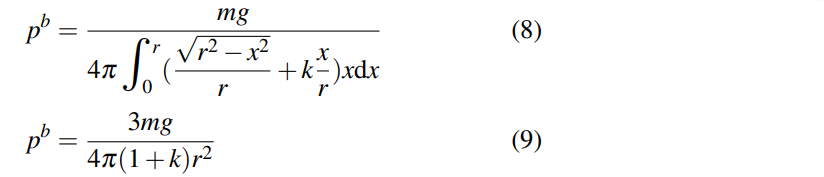
С коэффициентом вертикального трения (k), определенным практическим экспериментом, максимальное значение линейного давления p, приложенного к объекту, можно оценить с помощью уравнения 9. Из него можно выбрать материалы рукава ROSE, размер и/или вес объекта. Дабы не повредить его в ходе захвата и переноса.
Модель расчета вертикальной деформации рукава

Изображение №5
На этом этапе ученые пытались оценить деформацию рукава из силиконовой резины при захвате объекта, используя упрощенный аналитический подход к упругой пружине с постоянным поперечным сечением (площадь А). Это предположение сделано для того, чтобы заменить сложную морфологию рукава с неравномерным распределением толщины оболочки в вертикальном направлении (схема выше) на простую упругую пружину. Благодаря этому предположению вертикальная деформация ROSE (Δh) может быть определена по закону Гука на основе силы тяжести (G), приложенной к объекту, и коэффициента жесткости на единицу площади рукава (k0):

где A = Vs/h0, а Vs — объем рукава ROSE. Из этого следует:

Ученые решили разделить рабочее состояние ROSE на две зоны: зону самобалансировки (B-зона с эквивалентным коэффициентом жесткости k1) и стабильную рабочую зону (S-зона с эквивалентным коэффициентом жесткости k2). В целом, сложная деформация изгиба рукава ROSE приводит к неравномерному распределению деформации. В начальной фазе (В-зона) рукав начинает скручиваться, что приводит к увеличению площади контакта с объектом (рукав при этом все еще мягкий). Когда захват достигает максимума, рукав ROSE становится более жестким. Это означает, что эквивалентная пружина рукава перемещается в S-зону с более высоким средним коэффициентом жесткости k2. Другими словами, в соответствии с каждой областью, относящейся к массе объекта, эквивалентная пружина рукава ведет себя по-разному и характеризуется двумя коэффициентами k1 и k2. Следовательно, уравнение 11 можно записать так:

Из уравнения 12 можно оценить вес объекта, измерив деформацию ROSE, и наоборот.
Подготовка к опытам

Изображение №6
В ходе практических испытаний было проведено несколько типов опытов: с полезной нагрузкой, проверка сенсорики, проверка прочности, совместная работа ROSE и UR5 (роботизированная рука).
Опыт с полезной нагрузкой был направлен на определение рабочего диапазона ROSE, то есть максимальной полезной нагрузки (6a). Объект закрепляли на верхней части вертикально расположенного силомера ZTA-500N. Захват ROSE закреплялся над объектом и силомером. В качестве исполнительного механизма вращения основания использовался двигатель постоянного тока 17HS4401S. Направляющая и двигатель управлялись контроллером 1 и контроллером 2 соответственно с помощью двух плат Arduino Rev3 UNO. Направляющая опускала ROSE к объекту, после чего производился его захват. Затем направляющая поднималась, что приводило к увеличению вертикальной силы, имитирующей увеличение нагрузки (6b).
Изображение №7
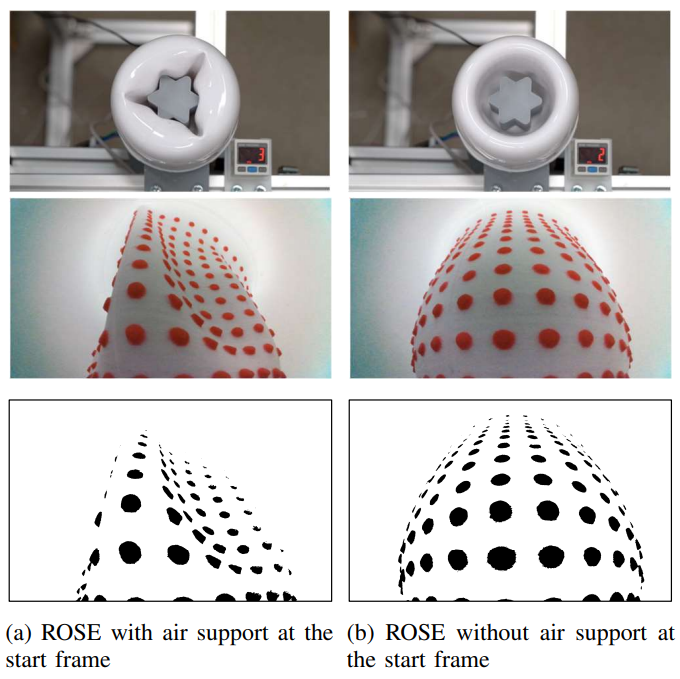
Для проверки сенсорики захват ROSE был оснащен белым рукавом с красными маркерами на внутренней стенке. Внутрь были помещены камеры, которые отслеживали смещение маркеров во время работы ROSE. Объект помещался в рукав и затем сжимался с/без использования воздуха при давлении 3 кПа. Воздух вводился внутрь рукава ROSE, чтобы изменить его жесткость во время надувания, а также помочь лучше обхватить удерживаемый объектом. Воздух контролировался электромагнитным клапаном VQD 1121-5L и датчиком давления ISE30A-C6H-N-M. Камера Sony DSCRX10M4 была установлена снаружи и над ROSE для записи поведения захвата, в то время как встроенные камеры фиксировали движение рукава и маркеров. Собранные с камер данные обрабатывались с помощью OpenCV в Python, что позволяло оценить сенсорный потенциал ROSE.

Изображение №8
Для мягких роботизированных микроманипуляторов всегда сохраняется острой проблема долговечности. В ходе этого опыта ученые продемонстрировали долговечность ROSE в двух случаях: повторяющееся задание на хватание и критическое повреждение.
В этом эксперименте была использована 4-дюймовая ROSE для захвата шара массой 210 грамм и диаметром 50 мм (похожий на обычное яблоко), сделанный путем склеивания двух полусфер черной лентой (8a).
В первом тесте руку UR5 использовали для повторного захвата, удержания и отпускания объекта с помощью ROSE (8b). Тест повторялся каждые 24 часа. Для второго теста внутреннюю и внешнюю оболочки рукава ROSE надрезали на 12.5, 25, 37.5, 50, 62.5, 75, 87.5, 100% их высоты. Затем проверялось когда рукав не сможет захватить предметы (8c).
Изображение №9
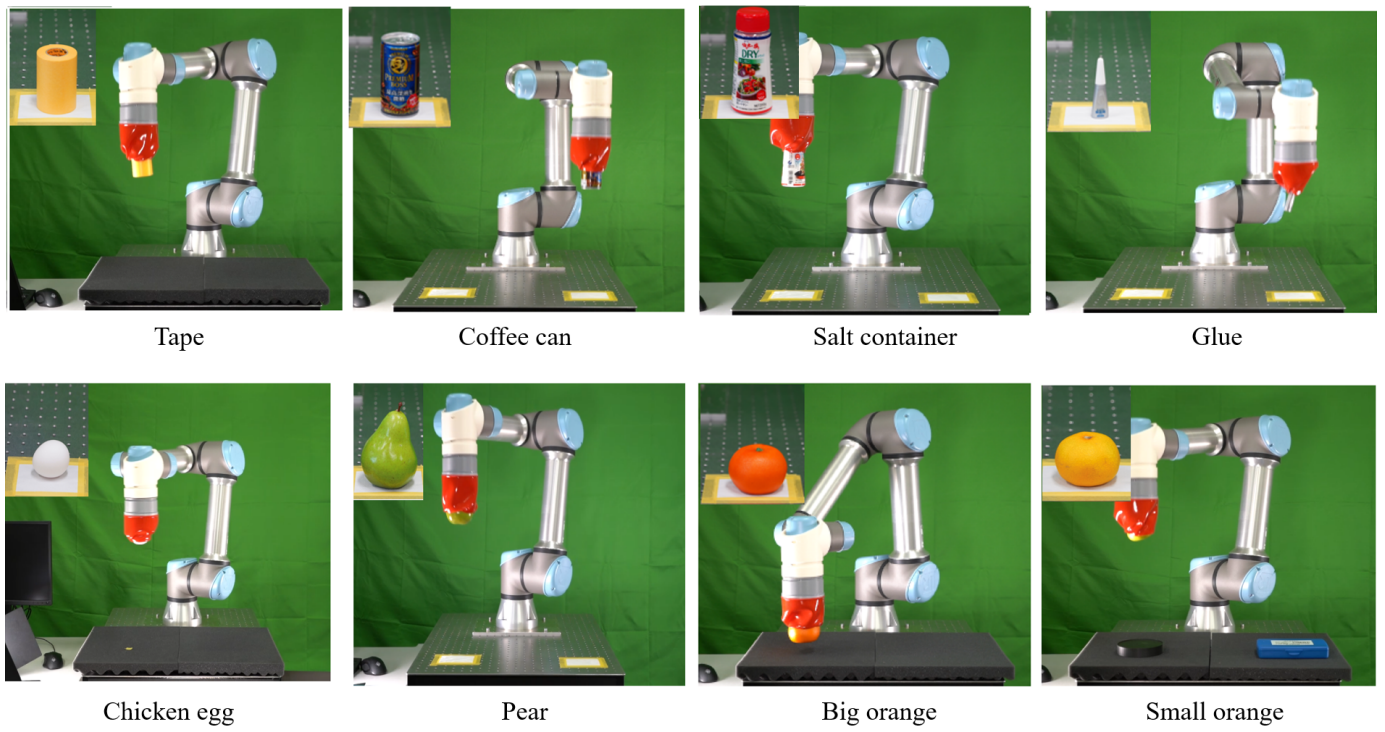
Во время демонстрационных опытов использовались различные предметы (яйцо, груша, большой апельсин, маленький апельсин). ROSE, установленная на манипулятор UR5, должна была захватывать и удерживать каждый из них.
Чтобы увидеть производительность ROSE с влажными и деформируемыми объектами, что является сложной задачей для роботизированных манипуляторов, был разработан критический эксперимент с очищенным вареным яйцом (диаметром 45 мм и высотой 52 мм), опущенным в контейнер с оливковым маслом (процент погружения: 0, 30, 60 и 90%).
Результаты опытов
Эксперимент с полезной нагрузкой показал, что ROSE может выдержать максимальную полезную нагрузку в 328.7 Н, создаваемую 49-граммовым силиконовым рукавом, благодаря морфологическим изменениям рукава, обозначенным контактным углом α в уравнении 7. Это уровнение также описывает, что чем больше α, тем ниже давление захвата. Таким образом, с закрытой структурой, ROSE демонстрирует высокое значение α (90 градусов в основании). Это объясняет, почему ROSE может достигать высокой подъемной силы. В результате захват ROSE имеет высокое отношение полезной нагрузки к весу около 6812% только для захвата (без скручивания).
Опыты также показали, что ROSE может аккуратно манипулировать объектами различных размеров, форм и материалов без какого-либо повреждения со 100% успехом. Во время этого эксперимента ROSE показала хорошую стабильность при захвате, транспортировке и размещении этих объектов. Кроме того, ROSE может собирать другие мелкие предметы, такие как продукты питания (арахис, рис или конфеты), механические предметы (болты, винты, гайки) и гранулированные материалы, такие как гравий.
В частности, успех захвата очищенного яйца, частично погруженного в контейнер с маслом, показывает, что ROSE также может работать с критическим влажным, скользким и деформируемым объектом, что является чрезвычайно сложной задачей для других мягких роботизированных манипуляторов. Единственным провалом была неспособность ROSE схватить яйцо, полностью погруженное в масло. Связано это с тем, что в рукаве остается воздух во время приближения к яйцу внутри контейнера с маслом, что предотвращает всасывание яйца в рукав. Однако этот недостаток можно нивелировать, если изменить процедуру захвата, объединив в единый процесс приближение к объекту и скручивание рукава, что уберет лишний воздух.
Тест прочности показа, что спустя 400000 циклов захвата на рукаве ROSE образовывались лишь небольшие разрывы (8b). Этот результат указывает на то, что захват ROSE может работать надежно благодаря своей простой, но эффективной конструкции. Специально нанесенные повреждения на рукав также не помешали ROSE успешно удерживать объекты.
Как было описано ранее, в данном прототипе была использована система тактильной сенсорики на базе визуальных данных с неиспользованием маркеров. На 7a и 7b четко видна разница в распределении маркеров, а значит, и в состоянии рукава при контакте с объектом. Поскольку в данном труде эта система не была объектом исследования, данных о ней нет, но в будущем ученые намерены изучить и ее.
Демонстрация работы ROSE.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых.
Эпилог
В рассмотренном нами сегодня труде ученые продемонстрировали новый тип роботизированного мягкого манипулятора, который может захватывать, удерживать и переносить объекты разной формы, массы, текстуры и габаритов.
Обычно манипуляторы оснащены чем-то наподобие человеческой кисти или клешни, которая сжимает объект и пытается его переместить. Такое устройство не всегда оптимально, ведь объект может быть весьма хрупким или даже скользким.
Вдохновленные механизмом раскрытия/закрытия цветка розы, ученые создали ROSE (ROtation-based Squeezing grippEr). Необычность этого устройства видна невооруженным глазом. ROSE состоит из мягкого цилиндра, прикрепленного к жесткому основанию, соединенному с двигателем вращения. Любой объект, помещенный в рукав, фиксируется за счет вращения, которое заставляет мягкий материал буквально обволакивать его.
Как отмечают ученые, ROSE обладает существенными преимуществами по сравнению с более традиционными манипуляторами. Во-первых, это устройство намного дешевле и проще в производстве. Все твердые детали можно распечатать на 3D-принтере, а сам рукав можно легко изготовить с помощью формы и жидкого силиконового каучука. Это гарантирует, что конструкция легко масштабируется и подходит для массового производства.
Во-вторых, ROSE может легко поднимать самые разные объекты без сложных механизмов контроля и датчиков. В отличие от манипуляторов, которые опираются на пальцеобразные структуры, рукав ROSE оказывает более мягкое и равномерное давление. Благодаря этому ROSE лучше подходит для работы с хрупкими и/или скользкими предметами. При весе менее 200 граммов захват может достигать впечатляющего отношения полезной нагрузки к весу в 6812%.
В-третьих, ROSE чрезвычайно прочный манипулятор. Опыты на износ показали, что ROSE может работать в течение 400000 циклов без особых повреждений. ROSE также можно оснастить сенсорными системами, которые будут помогать роботу оценивать размеры, текстуру и другие показатели объекта.
Авторы разработки считают, что ROSE может быть использован в самых разных направлениях, от сбора урожая на фермах до работы с реагентами в лабораториях.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?

tmxx
интересно, как определяется позиция объекта после захвата
uszer
Видимо камеры внутри нужны именно для этого.