
ПНЯ* — Периферия Независимая от Ядра известная так же как CIP — Core Independent Peripheral
Микроконтроллеры в импульсных источниках питания. Часть 1.
Микроконтроллеры в импульсных источниках питания. Часть 2.
Аппаратный прием ШИМ-кодированных сигналов микроконтроллерами Microchip
АЦП и АЦП с вычислителем микроконтроллеров Microchip
Порты ввода/вывода микроконтроллеров Microchip
Конфигурируемые логические ячейки в PIC микроконтроллерах
Микроконтроллеры в импульсных источниках питания
Часть 3
В предыдущих частях (Часть 1, Часть 2) обсуждалось как Независимая от Ядра Периферия микроконтроллеров Microchip позволяет строить ШИМ контроллеры импульсных источников питания из «кирпичиков» путем установления связей между различными периферийными модулями. Если в описанные выше ШИМ контроллеры добавлять новые «кирпичики», то получим новые функции. Рассмотрим что можно сделать еще.
Автоматизация функций
Защита силовой части
Важный вопрос в силовой электронике это обеспечение защитных функций. Если нарушена обратная связь, то возможны ситуации, когда силовой ключ будет открыт на недопустимое время.
Микроконтроллеры PIC с независимой от ядра периферией (CIP) имеют таймера с функцией ограничения (Hardware Limit Timer, HLT).
Рассмотрим пример реализации ШИМ контроллера с автоматической защитой (ограничение ширины выходного импульса и возможностью автовыключения).

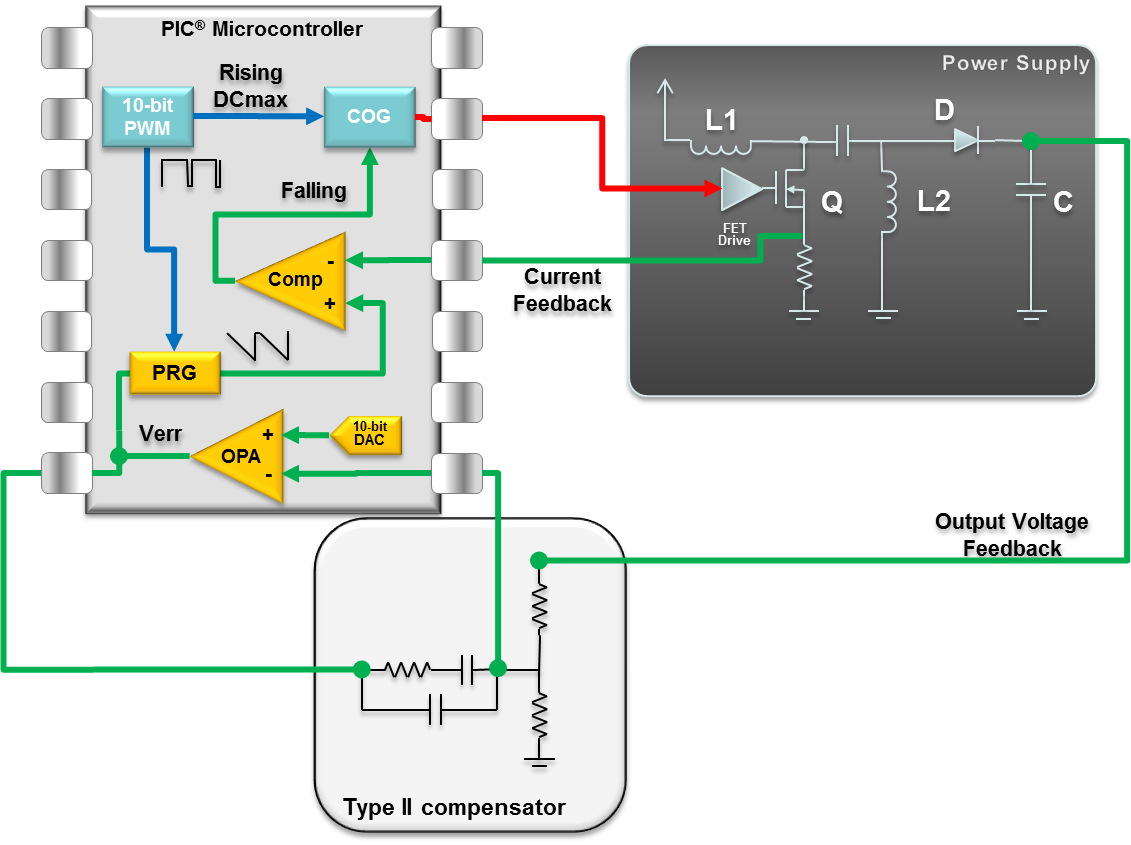
Рис. 3.1. ШИМ контроллер
Таймер HLT1 – задает ограничение времени открытого состояния MOSFET, таймер HLT2 – задает время выключенного состояния Toff.
COG – Complementary Output Generator – формируют сигналы управления MOSFET.
Алгоритм (инициализация периферии микроконтроллера):
- Таймер HLT2 инициирует включение COG (т.е. силового MOSFET) и взводит HLT1. Ток через индуктивность и напряжение на Rsense нарастает. При совпадении напряжения с Vref – срабатывает компаратор.
- В нормальном режиме компаратор сбрасывает COG, одновременно с COG сбрасывается HLT2 (Toff).
- Сигнал компаратора бланкируется на некоторое время при переключении силового ключа, тем самым предотвращает ложные срабатывания, которые могут возникнуть от возникающей помехи (на рисунке 3.1 сигнал бланкирования заведен для наглядности на компаратор, на самом деле функция бланкирования это особенность модуля COG, на время бланкирования он не воспринимает сигнал от компаратора).
Рис.3.2 поясняет работу такого ШИМ контроллера.
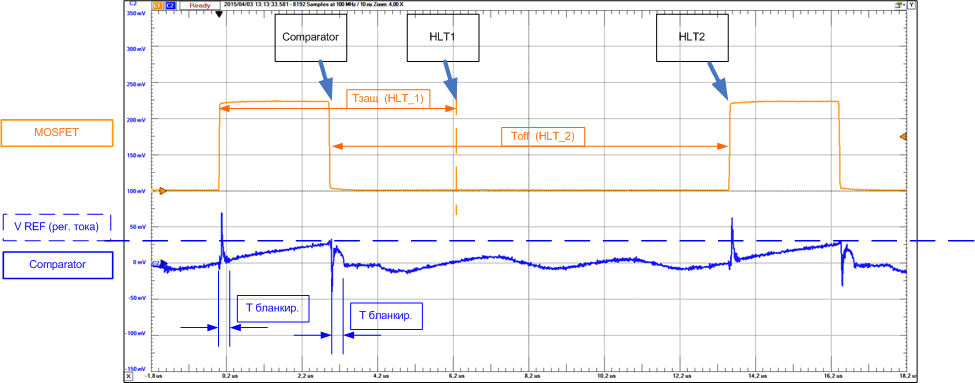
Рис.3.2. Диаграммы напряжений, поясняющие работу ШИМ контроллера (рис.3.1).
Если компаратор не сработает за безопасное время Тзащ., то ограничительный таймер HLT1 сбросит COG и ограничит время открытого состояния силового ключа. Большая длительность открытия ключа может означать обрыв обратной связи, неисправность силового транзистора или индуктивности.
Модуль COG имеет функцию блокировки работы, в этом случае программа может снять блокировку. Это можно использовать для диагностики – если постоянно срабатывает HLT1, то программа может выключить работу ШИМ контроллера и сигнализировать о неисправности.
Мягкий старт
Если за период ШИМ в индуктивности остается энергия, то за несколько периодов это может привести к её насыщению. В то же время, при старте источника выходное напряжение равно нулю и обратная связь по напряжению еще не работает. Т.е. создаются условия для насыщения силовой индуктивности.
Мягкий старт при управлении по напряжению может обеспечиваться увеличением индуктивности или формированием низкой скважности при старте с дальнейшим увеличением скважности.
Мягкий старт при управлении по току может реализовываться путем ограничения тока петли обратной связи при запуске источника.
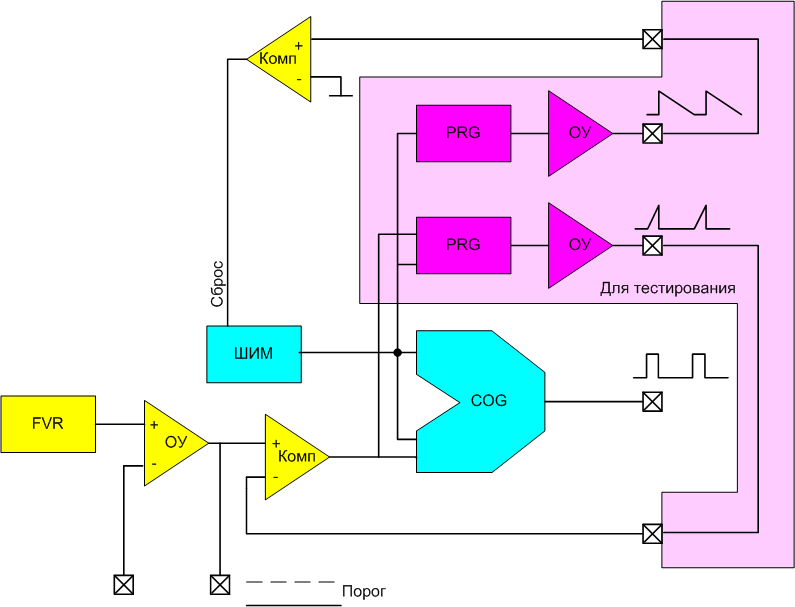
Пример: мягкий старт с ограничением максимального тока. ЦАП и компаратор С2 ограничивают минимальный пиковый ток, напряжение ЦАП программно медленно увеличивается. Когда Vout достигает нормы, то начинает работать компаратор С1, по прерыванию от которого можно отключить цепь мягкого старта и ограничения тока (ЦАП + Comp2).

Рис.3.3. ШИМ-контроллер с функцией мягкого старта.
Защита от перенапряжения
Добавление компаратора С2 для анализа выходного напряжения поможет выключить модуль COG при увеличении выходного напряжения выше порога Over Voltage (защита от обрыва в нагрузке, см.рис.3.4).
| Контроллер без защиты | Контроллер с защитой от перенапряжения на выходе |
|---|---|
 |
 |
Рис.3.4
Аналогичным образом можно организовать защиту от превышения температуры и пр.
Ограничение максимальной скважности
Ранее реализацию такой функции рассматривали в ШИМ-контроллерах с управлением по напряжению, так же вариант реализации см. на рис.3.1.
В контроллерах с управлением по току в нормальном режиме выходной ШИМ запускается фронтом входного ШИМ (опорного), а сбрасывается от сигнала обратной связи – токового компаратора. Для ограничения скважности выходных импульсов может использоваться опорный ШИМ, скважность которого выбирается как максимальная, для разрабатываемой топологии ИИП. Тогда, по спаду опорного ШИМ можно принудительно сбросить модуль COG (см. рис. 3.5).

Рис.3.5. ШИМ контроллер с ограничением скважности выходных импульсов.
Доступ к внутренним сигналам и диагностика
В то время как Периферия Независимая от Ядра формирует ШИМ-контроллер импульсного источника питания и замыкает обратную связь контура управления, ядро микроконтроллера позволяет осуществлять измерительные, диагностические и связные функции. Микроконтроллер способен измерять пиковый и средний ток через индуктивность, сигнал пилообразной компенсации. Вместе с измерением временных параметров это позволяет ядру микроконтроллера производить математические вычисления и получать информацию, которая не доступна через прямые измерения.
Используя измеренное напряжение ошибки Verr, PRG и IL_min, можно вычислить токи ILpeak и IL_avg.
Измерение скважности и знание IL_avg позволяют вычислять Iin_avg и Iout_avg. Используя Vin, Vout, Iin_avg, Iout_avg, можно оценить мощность и эффективность источника питания.
Интерфейсы связи позволяют осуществлять внешнее управление, передачу данных и диагностическую информацию. Программные ресурсы позволяют реализовывать стеки протоколов связи.
Как пример, микроконтроллер может использоваться в системах генерации мощности от альтернативных источников с накопительными батареями без использования специализированных микросхем преобразователей энергии. Для такого рода применений преобразование энергии и заряд аккумуляторов контролируется микроконтроллером. Функции поиска точки максимума энергии (MPPT) в солнечных конверторах и протоколы связи реализуются программно. Интерфейс взаимодействия с пользователем реализуется через порты ввода/вывода микроконтроллера. Таким образом, множество функций такой системы можно реализовать на одном микроконтроллере (см. рис. 3.6), а не применять несколькоо микросхем и МК.

Рис.3.6.
Независимая от ядра периферия позволяет осуществить ряд других функций: ограничение тока или выключение источника при перегреве, изменение режима работы с прерывистым током в режим с непрерывным током и др., осуществлять контроль последовательности включения ИИП, осуществление дрожания частоты для отстройки частоты переключения и/или уменьшения (размазывания) спектра помех источника.
Выше рассматривались реализации ШИМ-контроллеров на независимой от ядра периферии МК для реализации однокаскадного или одноканального ИИП.
Семейства микроконтроллеров PIC16F176x/177x имеют до 4-х однотипных наборов периферии, каждый их которых может использоваться в построении преобразователя энергии. Таким образом, контролеры указанных семейств могут быть ядром многоканальных или многостадийных ИИП и преобразователей энергии.
Программа микроконтроллера
ИИП с реализацией на независимой от ядра периферии практически не требует вмешательства со стороны ядра микроконтроллера. Задача микроконтроллера сводится к первоначальной конфигурации периферии, после чего функции/модули работают автономно по сигналам обратной связи. От контроллера может потребоваться минимальное участие при обработке и изменению алгоритма взаимодействия периферии, например при мягком старте, изменению выходных параметров источника, отработка аварийных режимов и др.
Поэтому ядро и программа микроконтроллера могут выполнять ряд присущих им функций – управления, обеспечения интерфейса с управляющим оборудованием, индикации режимов и пр.
На сайте Microchip можно найти реализацию интерфейсов PMbus, DALI, DMX, которые широко применяются в различных системах с преобразователями энергии.
Отладка
Для отладки системы не обязательно начинать с макетирования силовой части. Для некоторых задач ресурсы и периферия МК позволяют формировать как логику управления преобразователем, так и эмулировать сигналы обратной связи выходной топологии преобразователя.
| топология | схема |
|---|---|
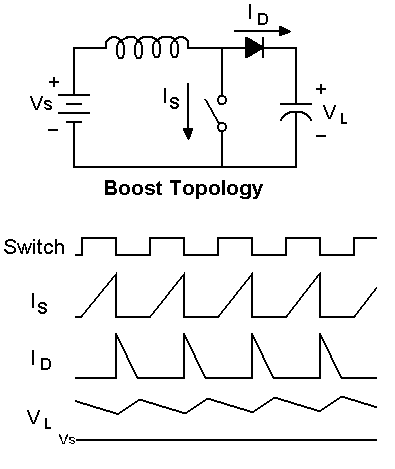 |
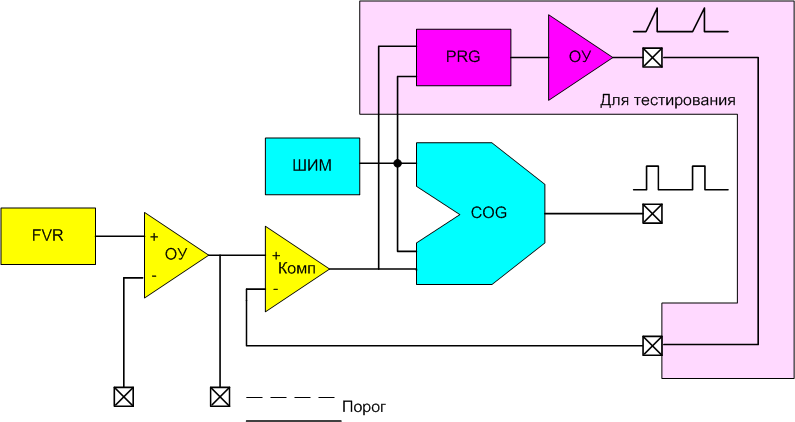 |
Рис.3.7. Пример формирования пилообразного сигнала, для отладки ШИМ-контроллера с измерением пикового значения тока.
| схема | диаграмма |
|---|---|
 |
 |
Рис.3.8. Пример формирования пилообразных сигналов, для отладки ШИМ-контроллера с измерением пикового значения тока и детектированием нулевого тока в индуктивности.
Итоги
Возможность гибкого конфигурирования периферии позволяет использовать один и тот же МК общего применения в разных задачах, в том числе и для создания ШИМ-контроллеров преобразователей энергии.
Периферия независимая от ядра интересна сама по себе, но наибольшую пользу может принести возможность синтеза функциональных блоков, т.е. совместное использование нескольких периферийных модулей для решения конкретных задач. В этом случае тактовая частота, быстродействие и разрядность ядра уходят на второй план – аппаратная часть выполняет специализированные функции, а ядро занимается программной поддержкой изделия.
Использованная и рекомендуемая для изучения литература:
- Microchip web site: http://www.microchip.com/promo/dspic33-gs-digital-power
- Конфигурируемые логические ячейки в PIC микроконтроллерах https://geektimes.ru/post/278718/
- Порты ввода/вывода микроконтроллеров Microchip. https://geektimes.ru/post/279374/
- TB3119. Complementary Output Generator Technical Brief. www.microchip.com
- Dynamics and Control of Switched Electronic Systems. Chapter 2. Pulse-Width Modulation http://www.springer.com/978-1-4471-2884-7
- TB3155. Multiphase Interleaved PWM Controller with Diode Emulation Using 8-Bit PIC Microcontrollers. www.microchip.com
- TB3153. Sample Functions Implemented with the Programmable Ramp Generator. www.microchip.com
- Keith Billings, Taylor Morey. SWITCHMODE POWER SUPPLY HANDBOOK
- Marty Brown. Power Supply Cookbook.
- AN2122. Flyback SMPS Using a Microcontroller as Control Unit. http://www.microchip.com
- 20097 PC7. Designing Intelligent Power converters Using Core Independent Peripherals (CIPs)
Microchip MASTERs Training 2016. - AN2456. Configurability in a Switched Mode Power Supply Controller. http://www.microchip.com
Комментарии (11)

VT100
06.09.2017 23:02Мягкий старт при управлении по напряжению может обеспечиваться увеличением индуктивности или формированием низкой скважности при старте с дальнейшим увеличением скважности.
Скважность — отношение периода повторения импульса к его длительности (>=1 по определению). Ergo скважность != коэффициенту заполнения (duty cycle, как обычно пишут в app. notes).

Goron_Dekar
07.09.2017 09:44Эх, жаль не в arm'ах. Не люблю железки, для которых нет хотябы 3-х конкурирующих компиляторов. Всегда есть шанс нарваться.
armature_current
07.09.2017 10:00Недавно наткнулся на ништякового тараканчика UCD3138. Все то, что нужно для ИИП.
ariz0na Автор
07.09.2017 10:09По поводу UCD3138. Это уже полностью цифровое решение, аналоговая ОС заменяется на быстрое ядро с вычислениями и DSP. У многих есть. У микрочип это dsPIC33 серии GS — быстрые АЦП, компараторы, ОУ, DSP ядро, 70MIPS, ШИМ c разрешением 1нс.
www.microchip.com/ParamChartSearch/chart.aspx?branchID=8182
www.microchip.com/design-centers/intelligent-power/digital-power-design
n12eq3
08.09.2017 12:53Статьи шикарные и по тексту и по сопровождающим картинкам. Есть ли личный опыт по применению и какое-либо сравнение с готовыми контроллерами (buck или boost)? Прежде всего интересует получение кпд >95 при цене не как у чипов от LT (чипы чуть дешевле ракеты).
ariz0na Автор
08.09.2017 13:11Спасибо. Опыт есть в прототипировании и помощи в конфигурации периферии PIC (т.е. ШИМ контроллера) под задачи партнеров. Сам не большой спец по «аналоговой/силовой» части. Т.е. мои задачи были примерно такие, что под желаемую диаграмму сигналов (т.е. кто на что влияет, запускает, выключает) «нарисовать» ШИМ контроллер и сделать реализацию на CIP (с объяснениями что, зачем, почему). Далее уже другие люди «прикручивали» силовую часть и воплощали свои идеи.
n12eq3
08.09.2017 13:26Есть ли у «других» людей положительный опыт? В сети присутствуют примеры и от самого Микрочипа в виде аппнотов и любительские схемы, но только лишь схемы…
Прежде всего интересует построение источников с достаточно большой частотой. Для условных 50кГц получалось делать аналог пня и на простых пиках и на avr, через костыли из прерываний и дискретной логики для сброса шим на текущем периоде. Для высокой же частоты уже нужно как-то учитывать все задержки и даже для 300кГц «аппаратная» реализация не прокатывала, обратная связь замыкалась только в софтовом виде и с большими погрешностями (крайне низкая разрешающая способность аппаратного шима для высоких частот).
На данный момент есть десяток 16f1779 и силовая часть для buck, но не хватает вечеров чтобы полностью раскопать внутреннюю блок схему.
BigBeaver
08.09.2017 13:39У меня получается, что готовые чипы, как правило, выгоднее для типовых задачь.
ariz0na Автор
08.09.2017 14:25Суть решений на CIP — синтез аппаратного ШИМ-контроллера с аналоговой ОС. ШИМ — «аналоговый», цифрой (таймером) задается только период. Скважность определяется по компаратору, т.е. обратной связью. Прерывания не нужны, ШИМ обновлять/рассчитывать кодом не нужно.
Кстати, на новых ATtiny817 таймер TCD то же сделан с прицелом на подобные задачи — есть бланкирование, есть сброс по внешним сигналам.
(для полностью цифровых решений есть dsPIC — см. комментарий выше)
Да, положительный опыт есть.
Рекомендую не раскапывать внутреннюю схему F1779, а нарисовать то что Вам нужно, какой фронт/уровень к чему должен приводить, а далее через MCC настроить нужную периферию. Думаю вся необходимая Вам периферия в нем присутствует.n12eq3
08.09.2017 19:26Всё это понятно, про построение ОС напрямую через модули либо кодом, описал так как делалось в некоторой аналогии с «пнем» через костыли.
МСС вещь хорошая, но т.к. вся работа это разработка электроники с контроллерами (микрочипа в том числе) и делается это в виде хобби — очень не хочется просто потыкать в конфигураторе и забить на всё остальное.
alexhott
Делал как-то часы на неоновых индикаторах, за основу взял атмегу 8. Нужно было питание 180 вольт для индикаторов, в итоге все работало на одном контроллере. ШИМ работал в преобразователе, контроллер отслеживал напряжение и корректировал скважность. Правда над алгоритмом пришлось попотеть, а специализированные микрухи сразу работают.