

Продолжаю тему про имитацию левитации. Для тех кто не читал первую публикацию, могут пройти по ссылке. В отличии от первой публикации, в этой статье я продемонстрирую псевдолевитацию воздушных пузырьков в воде.
В начале видео ролика демонстрируется все протестированные мной варианты псевдолевитации, а потом с 3:17 минуты начинаются краткие пояснения. Тем кому надоест смотреть демонстрацию, могут сразу перейти к пояснительной части.
В этой демонстрации используется тот же самый стробоскоп, но немного упрощенный, так как он без электромагнита. Вместо электромагнита в этот раз я использую импульсный, аквариумный насос. Который качает воздух. Работает насос от сети 220В на частоте 50Гц. Насос подключен через один выпрямительный диод. Таким образом диод пропускает только положительные полупериоды.
Что бы синхронизировать пузырьки со вспышками света, стробоскоп нужно настроить на любую кратную частоту 12,5-25-50-75-100 Гц. Соответственно при увеличении частоты стробоскопа в два или и более раз, расстояние между пузырьками будет так же кратно уменьшаться. В видеоролике Вы можете посмотреть фрагмент на 57 секунде, в котором частота увеличена по отношению к 50Гц и пузырьки держатся на очень коротком расстоянии друг от друга.
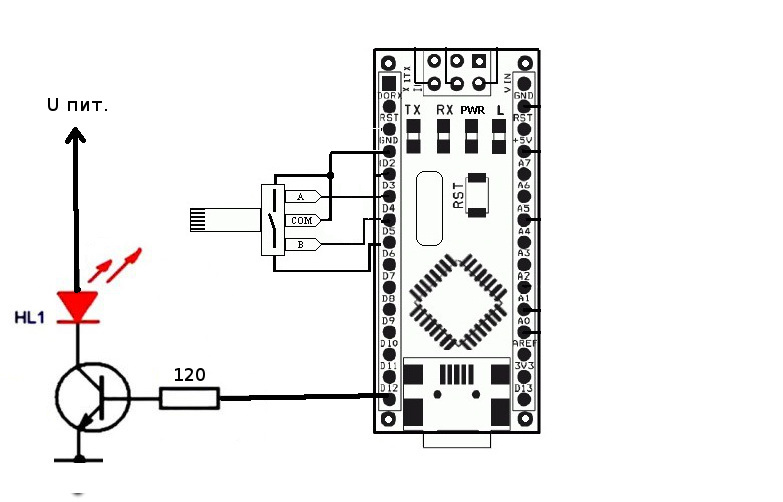
Схема стробоскопа
Я использую схему на ардуино из прошлого проекта потому, что мне так проще и быстрей. А тем кто хочет повторить проект без ардуино, то могут обойтись обычным таймером на микросхеме NE555.
Используемые в схеме компоненты:
Arduino nano — 1 шт.
Энкодер — 1 шт.
Макетная плата — 1 шт.
Старая LED лампа — 1 шт.
Транзистор КТ972 — 1 шт.
Насос аквариумный — 1шт.
Резистор 120 Ом — 1шт.
Пояснения по схеме:
Светодиодный элемент как я уже говорил, использовал из старой неисправной светодиодной лампы. В которой не работал драйвер.
По напряжению падения на LED элементе выяснил, что его рабочее напряжение 48В. Что бы уменьшить напряжение питания элемента до 24 В, я поделил элемент на две части, разрезав одну дорожку и запараллелил эти два массива светодиодов.
Так как питание светодиодного элемента осуществляется короткими импульсами, а напряжение питания равно напряжению падения на светодиодах, то ограничивать ток я не стал. Потому как LED элемент все равно работает в ненасыщенном режиме.
Светодиодный элемент коммутируется ключом на транзисторе КТ972. Это составной транзистор или как его еще называют транзистор Дарлингтона, пара Дарлингтона. Можно было применить и MOSFET, но для такого маленького тока и КТ972 слишком много.
Резистор в базе транзистора ограничивает выходной ток контроллера, для того, что бы выход контроллера не вышел из строя. По Datasheet этот ток не должен превышать 40мА. Грубый подсчет, без учета падения напряжения на переходе транзистора будет таким: 5В/0,04А=125 Ом. Так как в линейке сопротивлений такого номинала не бывает, то ставим 120 Ом. Если учесть падение напряжения на переходе транзистора, то ток все равно не превысит 40мА.
Энкодер работает используя всего одно прерывание контроллера INT1. При этом нет надобности бороться аппаратно с дребезгом контактов, так как код с этим справляется, без лишних задержек.
При вращении энкодера без нажатия, изменяется частота. По умолчанию частота в коде 50Гц. При вращении энкодера с нажатием, изменяется длительность вспышки стробоскопа. Насос как я писал выше, работает от переменного напряжения 220в на частоте 50 Гц.
Программная часть стробоскопа
Код от прошлого проекта я не стал править, оставил все как есть
Код для ардуино
// Выводы ЭНКОДЕРА
#define CLK 3 // Clock Подключаем к INT1, нельзя переназначать
#define DT 4 // второй вывод энкодера
#define SW 5 // switch кнопка энкодера
#define Min 1 // минимальное значение
#define Max 20000 //максимальное значение
#define led_pin 12 // подключен светодиод
#define coil_pin A0
#define step_freq 1 // шаг изменения частоты плавно 0,1гц
#define step_timelght 100 // шаг приращивания в мкс
volatile int freq = 500; // частота в Гц умноженная на 10, для более плавной настройки
volatile uint32_t paus, time_light=2000; // время свечения светодиода в мкс
uint32_t oldcount;
boolean DT_last; // последнее состояние энкодера
void setup()
{
pinMode(CLK,INPUT_PULLUP); // Clock Подключаем к INT1, нельзя переназначать
pinMode(DT, INPUT_PULLUP); // второй вывод энкодера
pinMode(SW, INPUT_PULLUP); // кнопка энкодера
pinMode(led_pin, OUTPUT); // управление симистором
pinMode(coil_pin, OUTPUT);
attachInterrupt(1, encoderTick, CHANGE); // прерывания от Энкодера
DT_last = digitalRead(CLK); // считываем положение CLK
}
void loop()
{
paus=5000000/freq;
digitalWrite(coil_pin, 1);
digitalWrite(led_pin, 1);
oldcount = micros();
while( (micros() - oldcount) < time_light){} // длительность импульса выдержки
digitalWrite(led_pin, 0);
while( (micros() - oldcount) < paus){} // положительный полупериод
digitalWrite(coil_pin, 0);
oldcount = micros();
while( (micros() - oldcount) < paus){} //отрицательный полупериод
}
//обработчики прерываний Энкодера
void encoderTick() // Обработка прерываний от Энкодера
{
uint8_t DT_now = digitalRead(CLK); // считываем текущее положение CLK
if (DT_now != DT_last && digitalRead(SW)) // если предыдущее и текущее положение не равны, значит был поворот
{
if (digitalRead(DT) != DT_now) // если DT не равен CLK, значит вращение по часовой стрелке
{
if( freq < Max ) freq += step_freq; // прибавить
} else { // если DT равен CLK, значит вращение против часовой
if( freq > Min ) freq -= step_freq; // убавить
}
} else
if (DT_now != DT_last && !digitalRead(SW)) //если нажата кнопка и было вращение
{
if (digitalRead(DT) != DT_now) // если DT не равен CLK, значит вращение по часовой стрелке
{
if( time_light < paus ) { time_light += step_timelght; } // убавить длительность
} else if( time_light > 0 ) time_light -= step_timelght; // прибавить длительность импульса выдержки/
}
DT_last = DT_now; // сохранить положение CLK для следующей проверки
} Объясню как это работает
Насос с частотой 50 Гц создает давление в трубке, выпуская в импульсе порцию воздуха. Дозированный воздух в виде пузырьков, выходит из трубки с той же частотой 50Гц и поднимается вверх.
Подстроив стробоскоп на кратную частоту, частоте 50Гц, мы увидим висящие в воде пузыри, так как частоты будут засинхронизированными. И пузырьки будут сменять друг друга, в неактивный момент стробоскопа. Наш глаз этого подлога не заметит, так как он фиксирует только освещенную сцену. В силу физических причин, глаз может видеть только отраженный свет, а то что что происходит в темноте он не видит.
Заключение
Надеюсь, что эта статья Вам понравилось и если Вы хотите увидеть новые публикации и не пропустить их, то подпишитесь. Возможно, что в ближайшее время я все таки соберу левитирующий мини дождь. И покажу Вам то, что у меня получилось.
Если у Вас остались вопросы, задавайте, я на них с удовольствием отвечу.
P.S.
Еще одно видео которое не войдет в серию моих публикаций, но все так же основано на эффекте стробоскопа.
Комментарии (9)

iTheBest
03.05.2018 08:04Очень крото.Сам впервые увидел такое на discovery. Если интересно, поишите на youtube перчатку времени.
bugdesigner
03.05.2018 08:53+1На видео вентилятор с выходом с датчика холла. Можно использовать этот сигнал для запуска стробоскопа. Только учтите, что датчик даёт 2 импульса на оборот и выход с открытым коллектором.
CyberBot Автор
03.05.2018 12:06Про датчик холла я думал, частоту можно триггером поделить. Но я не стал все усложнять. так как у меня уже все было готово.
DEM_dwg
С капельками гораздо лучше получается.
С пузырьками можно попробовать подобрать размер, чтобы они не так сильно деформировались пока поднимаются.
Но скорее всего скорость подъема тоже упадёт.
CyberBot Автор
Согласен. Я долго сомневался стоит ли вообще выкладывать эту статью
С мелкими пузырьками тоже самое происходит, на видео есть тест с 4-мя потоками.
DEM_dwg
Кстати я придумал вариант как лучше организовать управление каплями!
Лучше всего тебе сперва сделать так чтобы все капли падали из сопел одновременно.
Если ты добьешься подобной синхронизации, то следующим этапом будет создание под соплом отсечки, которая будет управляться соленоидом.
CyberBot Автор
Одновременности можно добиться создав небольшое давление