

Дроны, дистанционно управляемые вертолеты, шпионские и военные мультикоптеры — все эти летающие устройства уже давно стали частью повседневности. Сегодня электрической бескрылой «леталкой» уже никого не удивишь. Вот оно, держится в небе на своих маленьких вентиляторах, безо всяких крыльев и только за счет электричества!
Однако, до недавнего времени машины с вертикальным взлетом и на электрической тяге были всего лишь недостижимой мечтой. Как же это стало возможным и почему никто их не делал раньше? Кто первым смог поднять электровертолет в воздух? Давайте посмотрим историю появления в нашем небе многопропеллерных жужжалок.
Предпосылки к появлению электрического вертикального взлета
Еще пятнадцать лет назад в небе среди компактных летающих устройств можно было наблюдать только самолеты и вертолеты с двигателями внутреннего сгорания.
И во всем мире, и в СССР основой авиамоделизма неизменно выступали самолеты. Это были кордовые, неуправляемые и радиоуправляемые модели. Про модели вертолетов ходили только слухи, кто-то хвалился, что смотрел на полет такого, но им не верили, и никто радиоуправляемые вертолеты в глаза толком не видел.
Конкурс радиоуправляемых вертолетов 1982 года в СССР
У моделей самолетов с авиадвигателями, работающими не на топливе, а от электричества, дело обстояло получше, но для вертолетостроения электромоторы на протяжении более ста пятидесяти лет, с самого момента их появления, были абсолютно непригодны. Вертолеты на видео 1982 года тоже имеют ДВС-двигатели.
Однако время не стоит на месте, и постепенно появились две необходимые для подъемной электротяги вещи. Во-первых, появились малогабаритные, а также и бесщеточные, или вентильные, электромоторы (https://ru.wikipedia.org/wiki/Вентильный_двигатель).
Дело в том, что до их появления никакие электродвигатели не давали такой мощности, которая была бы достаточной для подъема нужного веса при приемлемой собственной массе. Поэтому электрические моторы можно было применять в автомобилях, трамваях и метро, с их помощью можно было бриться, перемалывать пищу и качать воду. Можно было даже исхитриться и добавить к ним крылья, поставив их на самолет. Однако, первые электродвигатели в самолетах непременно проигрывали по ДВС по всем параметрам. Правда, не все электромоторы нового поколения изначально предназначались для авиации, сейчас мы об этом поговорим.
Рыбак-вертолетчик, 2010 г. Модель с ДВС
А во-вторых, появились компактные и ёмкие аккумуляторы, чему, скорее всего, значительно поспособствовало развитие мобильной электроники. Например, стали производиться литий-полимерные и литий-ионные аккумуляторы, которые пришли на смену никель-кадмиевым и никель-металлогидридным.
Самые первые аккумуляторы не были легкими и компактными, а поднять такой в воздух не представлялось возможным. Поначалу их пытались применять и в автомобилях, но появился двигатель внутреннего сгорания и на тот момент быстро поставил точку в развитии электромобилей. Современные же литий-полимерные аккумуляторы позволили получить бо?льшую ёмкость на единицу массы.
Перопроходцы
Proxflyer
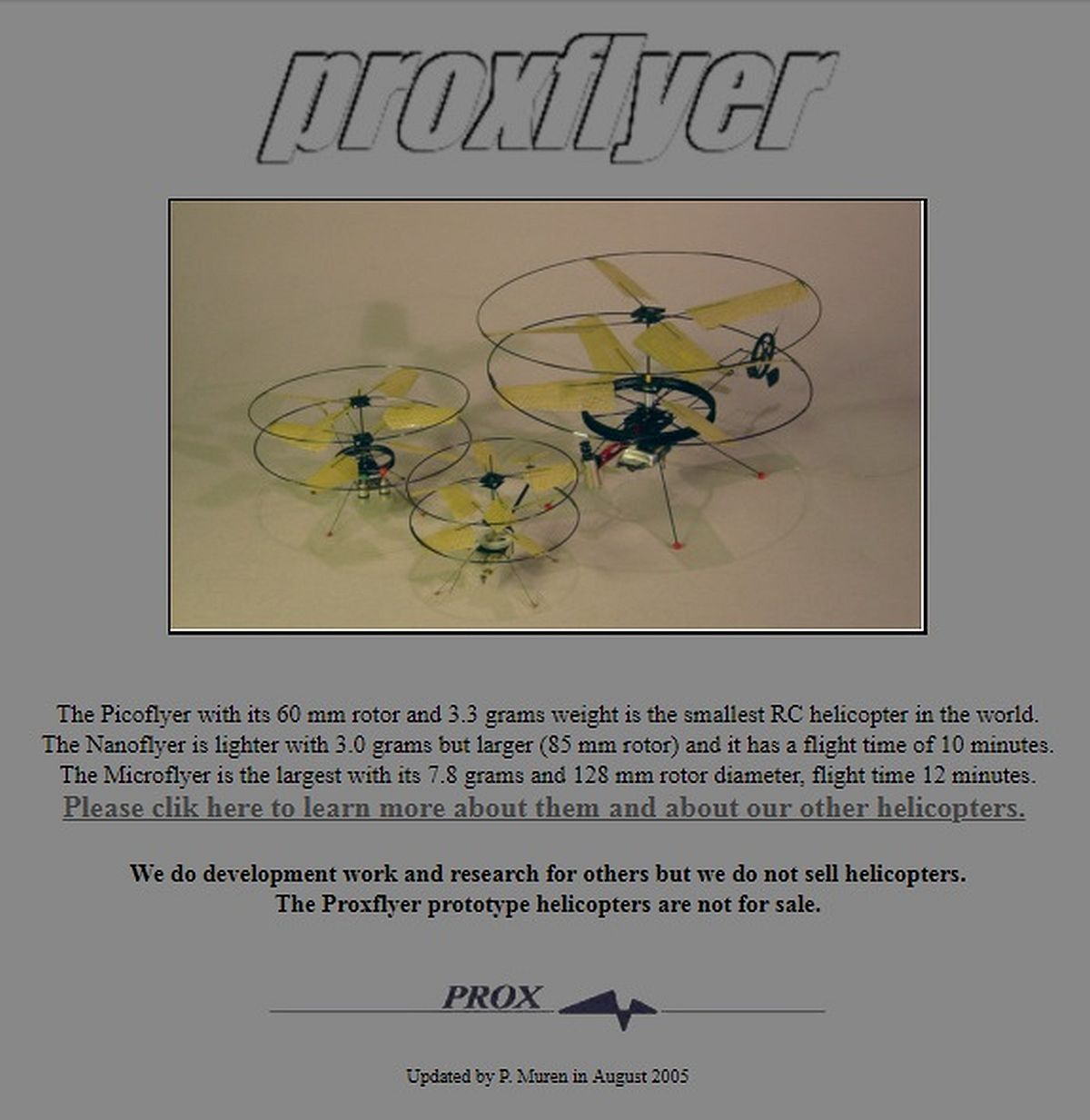
Первым соединить достижения новых технологий догадался норвежский инженер Peter Muren. Он создал сайт с описанием своего первого изобретения в 2003 году, если Archive.org не врет. Сайт назывался Proxflyer.com (именно с таким написанием, через «Y») и содержал фото и видео полетов невероятного для того времени устройства: вертолета размером всего лишь с пачку сигарет, при этом управлявшегося дистанционно.

Archive.org первые версии сайта показывает как созданные в 2003 году (http://web.archive.org/web/20031001000000*/proxflyer.com).
Чтобы заставить модель подняться в воздух, Питер применил самую стабильную в полете вертолетную схему — соосную (как у КА-50 Черной Акулы). В своей конструкции он не стал использовать несуществующие в то время мини-автоматы перекоса и, тем более, гироскопы, тем самым облегчив модель.
Peter Muren демонстрирует первую в мире модель электрического вертолета, 2004 год
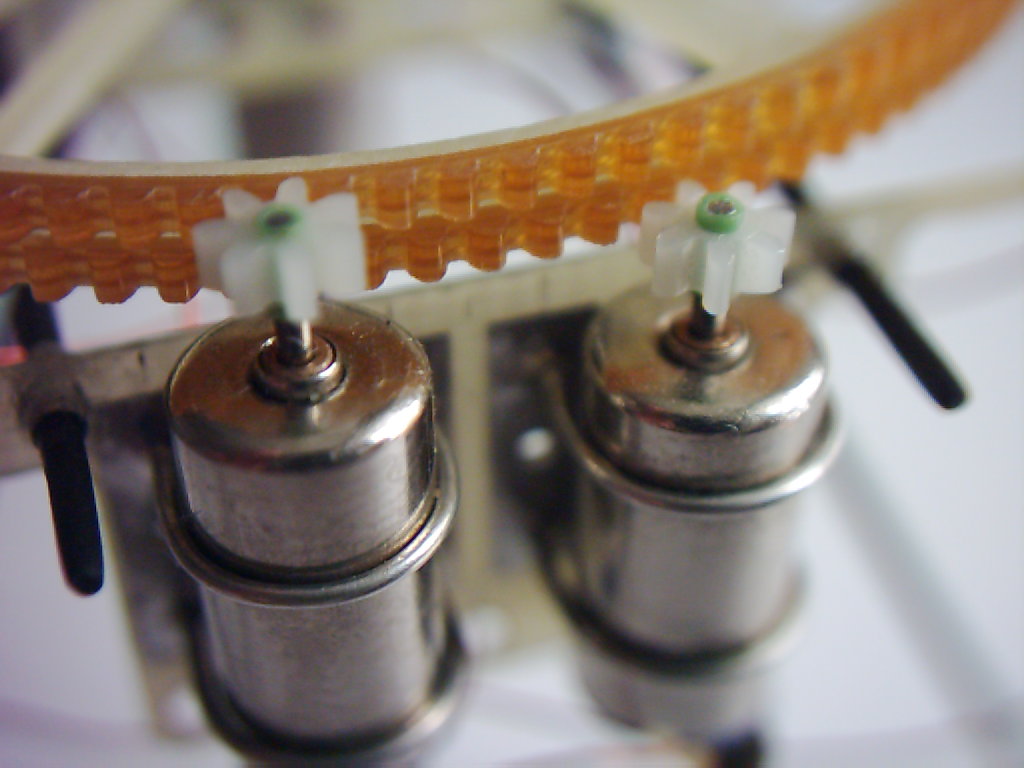
Приводы от электромоторов были выполнены на шкивах, а в качестве ремней использовалась тонкая резинка типа той, которая использовалась в пассиках для кассетных магнитофонов. Шестерней в данной схеме не было. Один мотор крутил оба винта, другой — поворачивал хвост.
Передача про Proxflyer, 2004 год
Не забывайте, что Ютуб был открыт только в 2005 году, поэтому ролик был залит позднее.
Питер смог добиться нужной массы устройства, использовав в своем вертолете новые литий-полимерные аккумуляторы. Для уменьшения веса лопасти и части корпуса вертолета были сделаны из бальзового дерева. В качестве моторов он применил те, которые тогда только что появились и поначалу применялись в виброзвонках пейджеров (кто не знает, что такое пейджер, спросите у своих родителей) и мобильных телефонов. Такие электромоторы так и называли: Pager motor (моторчик из пейджера):
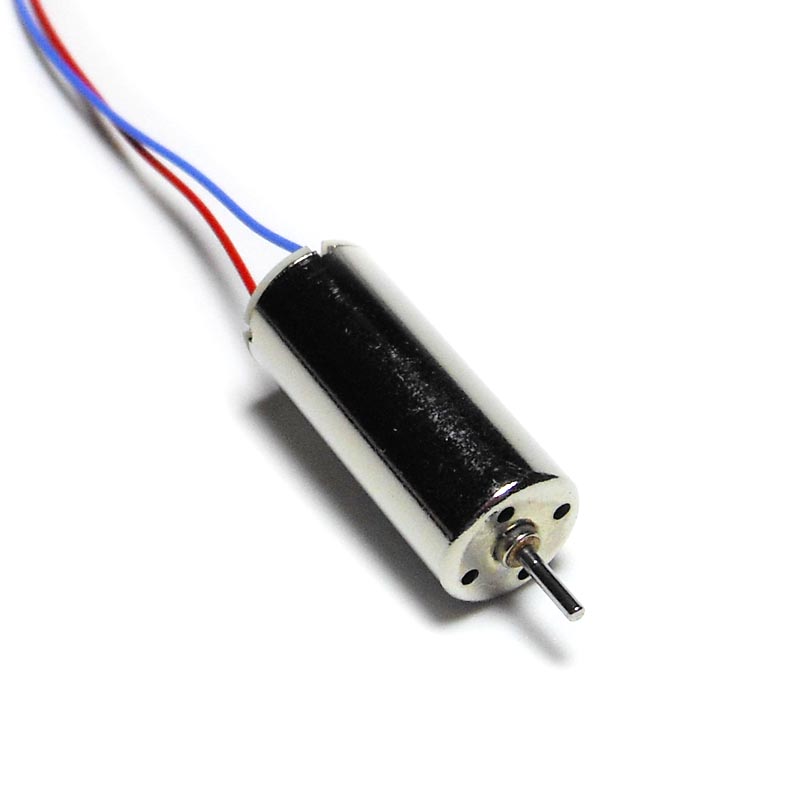
Поэтому первые микромоторы делались совсем не для вертикального взлета.
Позже Питер соорудил другие модели, где смена положения вертолета в пространстве осуществлялось путем изменения скорости вращения одного из двух соосных винтов, а ими управляли отдельные моторы. Всего за подъем их отвечало два.
Движение вперед осуществлялось за счет третьего электромотора, установленного не вертикально, как у классических вертолетов или как у первой модели, а горизонтально и поднимавшего хвост модели кверху.
Инженеру удалось найти такое сочетание миниатюрных и легких моторов с другими снижающими вес деталями, которое, наконец-то, позволило модели воспарить над столом.
Получив патент на свое изобретение, Питер занялся усовершенствованием своих моделей, а чуть позже фирма Interactive Toy Concepts стала производить игрушечные вертолеты по его схеме.
Более новая модель Proxflyer, примерно 2004 год.
Pixelito
Второй схемой, разрабатываемой параллельно, стала схема с вертикальным влетом моделиста из Бельгии по имени Александр. Он назвал свой вертолет Pixelito. Александр применил в нем схему, отличную от Proxflyer, у которой был лишь один несущий винт.
Стабильности ее полёта способствовало специальное устройство на винте: за неимением приемлемых по весу электронных стабилизаторов полета, на винт ставилось массивное навершие, выполнявшее при раскрутке роль гироскопа.
Сверху находится балансир (flybar, Bell/Hiller bar):
Как бы в последствии конструкторы ни пытались, без этой штуки вертолеты с одним винтом летать отказывались. Напомню, что первой вертолетной схеме балансир был не нужен или, может быть, его функцию частично выполняло ограничительное кольцо на лопастях из бальзового дерева.
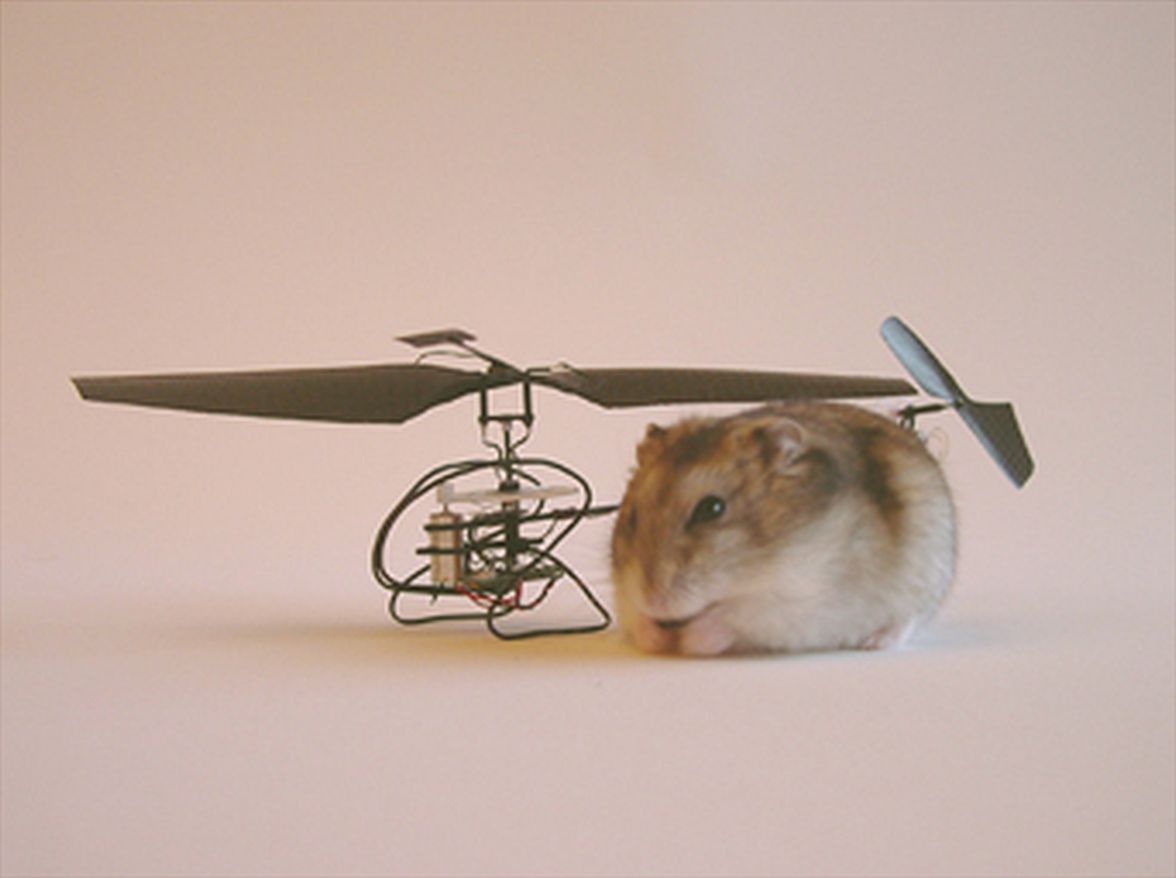
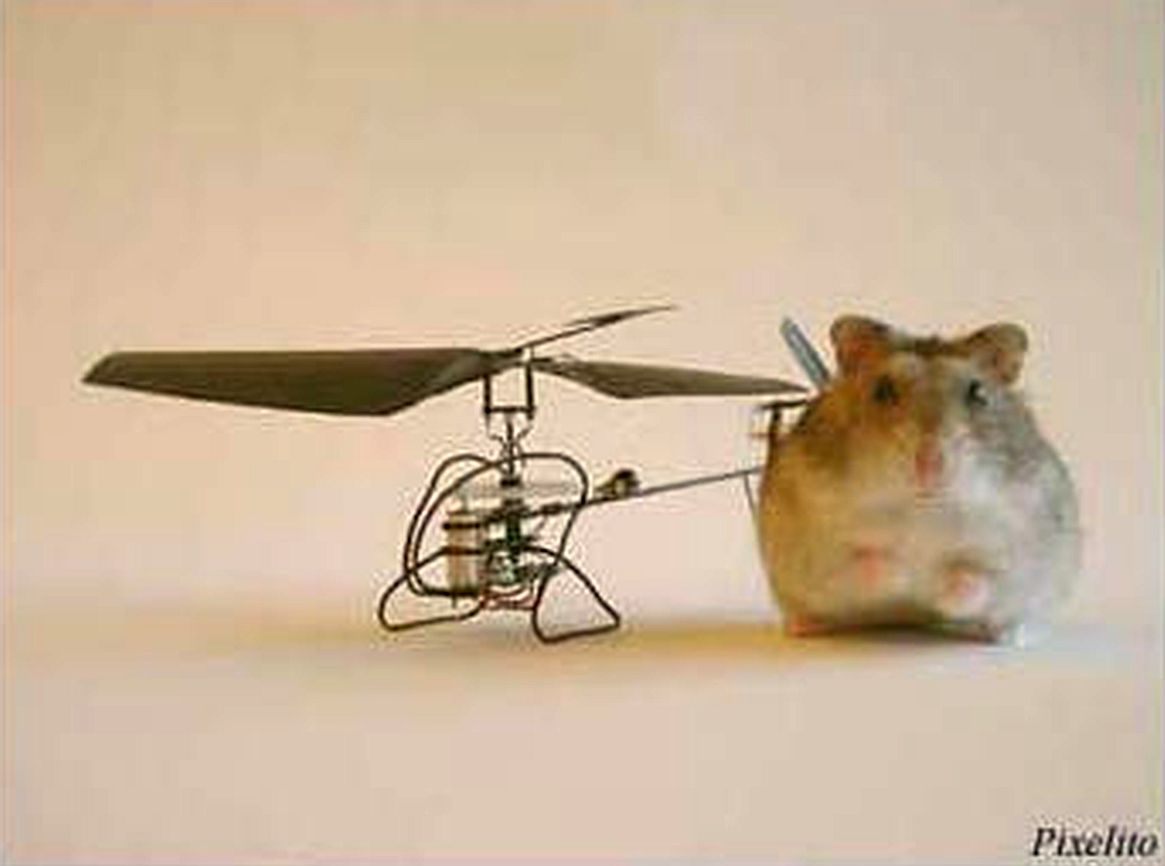
В этой модели моторчика было тоже два: для основного винта, который позволял лететь вверх-вперед, и для стабилизирующего пропеллера, с помощью которого можно было поворачивать. Модель получилась невероятно маленького размера, о чем можно судить по фото с хомячком, оно 2003 года, так что сорри за качество. Модель весила всего 6,9 грамм.
В 2003 году Александр был уже почти у создания работоспособной модели, и нашел Питера, создателя Proxflyer. Они решили объединить усилия, и таким образом довели свои модели до рабочих прототипов.
В записи от 15 Декабря 2003 года говорится:
«Сегодня мы с Питером с удовольствием представляем результат наших последних совместных разработок. Я создал вертолет Pixelito, а Питер — Proxflyer Micron (на тот момент уже не первую модель норвежца — мое примечание). Pixelito — это вертолет с моей собственной системой контроля ротора, а дизайн Питера уже довольно хорошо известен. Мы называем их роботами, потому что такое название характеризует их лучше всего. Примерно 2 недели назад мы с Питером провели чудесные выходные у меня дома и после этого решили, что было бы неплохо вести совместные исследования, каждый у себя дома, но двигаясь к общей цели. Это вылилось в создание модели весом всего 6,9 грамм вместе с аккумулятором, и мы оба знаем, что это не предел.
Александр и Питер»
Видео только что созданного мини-вертолета Pixelito, но в ролике им управляет друг его создателя, автор Proxflyer Peter Muren. Можно догадаться, что Александр держит камеру.
Pixelito, 2003 год.
Третьим прототипом могла бы стать нашумевшая в то же самое время разработка японской фирмы Seiko Epson. Модель могла летать только вверх и вниз.

К сожалению, после первой же новости об этом соосном летающем чудо-устройстве информация про него исчезла, осталась только статья с описанием: https://www.ixbt.com/news/hard/index.shtml?02/35/48.
Судя по всему, разработка не удалась и не получила дальнейшего развития, к тому же, не было ни одного видео с демонстрацией его работы. На фото видно, что в ней была использована схема, в которой соосные винты сочетались с балансиром.
Развитие электрического вертолетостроения
С появлением летающих прототипов идею подхватили и другие производители игрушек, и, используя новые двигатели, аккумуляторы и подобрав более современный и легкий пластик, стали производить модели вертолетов одну за другой, сначала по норвежской схеме, ну а потом и по подобию Pixelito, по-моему, первые серийные модели так и назывались — Pixelito.
Вертолет одной из первых моделей по схеме, аналогичной Proxflyer, фирма Syma, 2007 год
Также одна из первых моделей английской фирмы Fastek Computers, 2007 год
Поначалу вертолеты были, в основном, соосные. Одним из самых плодовитых на тот момент производителей игрушечных радиоуправляемых вертолетов была китайская компания Syma. Авиамоделисты из всех стран также вовсю пробовали разные варианты построек моделей с вертикальным взлетом, и некоторые их достижения были довольно-таки выдающимися, но то, что быстрее всего дошло до конечного потребителя — это продукция фирм-производителей игрушек.
Одна из первых моделей по схеме Pixelito, 2-канальная, лишь с балансиром, 2008 год
В результате как норвежский, так и бельгийский моделисты неплохо заработали на продаже прав на производство вертолетов на дистанционном управлении, сделанных по их схемам.
В последствии разработками Питера заинтересовались DARPA и норвежское Министерство Обороны, инженер создал свою фирму Prox Dynamics и стал разрабатывать вертолет-шпион для военных целей.

Что сейчас там происходит и на какой стадии находится производство, неизвестно.
Улучшения и повышение стабилизации полета
В то время как первые игрушечные вертолеты имели всего 2 канала управления (вперед-вверх и поворот лишь в одну сторону), любители для себя делали и модели на многоканальном радиоуправлении. Чтобы управлять самыми первыми моделями дистанционно управляемых вертолетов, требовалась довольно долгая тренировка, поскольку ровно удержать его в воздухе было довольно трудно, и многое зависело от мастерства пилота.
Для самых простых игрушечных вертолетов вместо радиоуправления применялось управление по инфракрасному излучению. В более продвинутых моделях — по радиоканалу. В дешевых моделях оно было двухканальным, чем дороже — тем каналов управления становилось больше.
В самых дешевых моделях на смену двухканальному управлению добавили третий, и управление стало больше походить на полноценный полет. Вот только держаться в воздухе, несмотря на множество каналов, было все еще непросто.
Обратите внимание, как трудно пилоту совладать с удержанием модели на месте:
Одна из первых моделей вертолетов, схема типа Pixelito, 2007 год.
Появление миниатюрных гироскопов значительно улучшило эту ситуацию. После добавления в модель этого устройства полет становился прямо непривычно стабилен, не надо было постоянно держать пальцы на клавишах управления. Однако такие модели стоили гораздо дороже, чем вертолеты без гироскопа. Гироскопы стали применяться и в моделях вертолетов с ДВС.
Видео про модели вертолетов с гироскопами, 2011 год
Самой популярной из моделей с гироскопом для массового покупателя была модель Syma S107, ну а самыми надежными, выдерживавшими прямые столкновения со стенами, зубы котов и бесконечные тараны мебели, наверное, являлись вертолетики фирмы Himoto.
Демонстрация возможностей электровертолета с гироскопом, 2014 год. А ваш квадрокоптер так умеет?
В военной области первой испытания выстрелов с радиоуправляемого вертолета стала проводить некая фирма Neural Robotics в 2006 году. Они подвесили дробовик на модель вертолета и стали исследовать ее поведение при выстрелах, а также как стрельба отражается на управлении.
Выстрел из дробовика, 2006 год
Их вертолет обладал ДВС, и этот опыт стал знаковым — он подтолкнул развитие направления ударных дронов. Сейчас военные мультикоптеры во всю сбрасывают бомбы, шпионят и наводят ракеты на цели.
Если сомневаешься — ставь больше пропеллеров!
Почти сразу после появления моделей вертолетов начались попытки создания многопропеллерных, если можно так выразиться, машин.

Чем больше пропеллеров было в модели, тем труднее было согласовывать их работу. Тот же вертолет Chinook с картинки выше, без гироскопа колбасило при полете так, что становилось сомнительным применение двух пар винтов. Для полета же моделей с тремя и более количеством двигателей требовалась электроника, на порядок сложнее вертолетной.
Поначалу стали экспериментировать с количеством электромоторов. Это сейчас почти всегда ставится знак равенства между дроном и квадрокоптером, но на заре их появления было совсем не так.
Изначально многомоторные модели собирали исключительно энтузиасты. Почти сразу же возникла идея ставить на модели компактные камеры, которых в то время было не много, а GoPro появилась уже позже, и удачно вписалась в тренд. Камеры собирали из собственноручно припаянных контроллеров к камерам от мобильных телефонов и так далее. Конструкторы мультикоптеров подбирали материалы для их рам, экспериментировали с разными электродвигателями, стали паять различные модули для согласованного управления пропеллерами, писать для этого ПО и обмениваться удачными находками друг с другом. Получалось с переменным успехом.
Пока не было надежной электроники для согласования моторов и не появились миниатюрные гироскопы, смотреть на полеты таких устройств жутковато. Здесь были и поломанные рамы, и потерянные видеокамеры, и утонувшие в водоемах дорогостоящие электронные модули. Однако год от года стабильность, дальность полета, простота управления и качество снимаемых видео постоянно возрастали.
Появились коптеры с двумя, тремя, четырьмя, пятью, шестью, восемью и более пропеллерами — соответственно, бикоптеры, трикоптеры, квадро-, пента-, гекса- и октакоптеры.
Один из первых трикоптеров, 2010 год
И вот, после долгих экспериментов, модели стали уже летать стабильно. Можно было не бояться, что она завалится в воздухе на бок или что вибрация при полете будет мешать управлению.
Бикоптер

Поначалу все ставили себе столько пропеллеров, сколько хотели, но позже каждой схеме, все же, нашлось свое применение.
Пролет квадрокоптера с камерой GoPro Hero 3 на борту через фейерверк, лучше смотреть в HD, 2014 год
Машины с тремя и четырьмя моторами стали чаще применяться для развлекательных полетов, для съемки видео, а увеличенное число пропеллеров пригодилось в коптерах для перевозки грузов, а также в тех случаях, когда от мультикоптера требуется надежность. Ведь если при отказе одного из моторов в модели вертолета неизбежно происходит его крушение, то в случае моделей с несколькими двигателями нагрузку вышедшего из строя мотора можно распределить на другие и удержать машину в воздухе. Долго не утихали споры между приверженцами трикоптеров и квадрокоптеров по поводу баланса между простотой и стабильностью полета.
Октакоптер, специально предназначенный для перевозки грузов, 2012 год
Дальнейшее развитие и перспективы
Благодаря совершенствованию бортовой электроники и использованию модулей GPS, модели научились удерживать свое положение в пространстве и постоянную высоту. На мультикоптеры стали ставить телеуправление, которое по-английски называется FPV — First Person View, вид от первого лица. С его помощью можно управлять дроном, гладя на мир через камеру, установленную на нем. В Сети почти все видео сейчас снимаются с таких дронов.
Проводятся гонки на мультикоптерах, чему способствует система управления с видом от первого лица.
Гонки на дронах с управлением с FPV, 2015 год
Позже одна компания при каком-то технологическом институте стала разрабатывать систему автоматического контроля не одного, а множества мультикоптеров и добилась впечатляющих результатов: они не только смогли заставить летать рой электрических устройств по заданным траекториям, не сталкиваясь. Добавив к ним иллюминацию и используя отдельный мультикоптер в качестве пикселя, они смогли составлять из них объемные изображения и надписи. Свое изобретение они впервые применили в рекламе фирмы Intel.
Голограмма из дронов, 2015 год
Уже в 2011 году построили прототип мультикоптера, способного поднять над землей человека. Сейчас это направление активно развивается. Ведь для перевозки людей здесь есть преимущества перед вертолетами. Это и удобство управления, и более компактные размеры, и электричество в качестве топлива, и безопасность из-за наличия нескольких пропеллеров вместо одного-двух.
Первый мультикоптер с человеком на борту, 2011 год
Устройство дронов продолжает совершенствоваться, для них появляется все больше сфер применения. Мультикоптеры совершенствуют многие авиапроизводители, включая Boeing. Да что там Boeing — сама Почта России уже во всю экспериментирует с доставкой грузов по воздуху.
Полет на квадрокоптере с видом от первого лица, от которого захватывает дух, 2017 год.
Возможно, скоро нас ждут аэротакси, огромные пространственные трехмерные скульптуры из дронов на любом большом празднике, доставка посылок и корреспонденции вне зависимости от того, где вы находитесь, а пиццы — всего лишь за три минуты!
schetilin
А можно поподробнее, в чем преимущество квадро над трикоптерами, и почему первые встречаются гораздо чаще?
Wesha
Квад выдерживает потерю одного мотора/винта без «совсем катастрофических» последствий; три — нет.
Oz_Alex
А вот и нет — пропеллеры попарно вращаются в противоположные стороны и потеря одного из них равноценна потере хвостового двигателя у вертолёта c одним винтом.
Я понятия не имею как можно удержать дрон в режиме такого блевотрона — www.youtube.com/watch?v=8j8WhHLU_aA (экшен с 1:10). Как я понял — один пропеллер развалился в полёте (1:36).
Wesha
Я имел в виду — «в принципе», а не в данной конкретной модели, которую Вы привели. При потере одного винта из четырёх теоретически всё ещё остаётся возможность контролируемо приземлить, пусть и вращающийся, коптер, с некоторым шаманством с увеличением скорости вращения оставшегося нескомпенсированным винта (конечно, фирмварь коптера должна быть на это рассчитана — я думаю, никто из имеющихся на рынке этого не умеет: слишком много мороки для разработчиков при ничтожном выхлопе). При потере одного винта из трёх — без вариантов.
Oz_Alex
Тогда, как мне кажется, надо отключать как раз нескоменсированный винт, чтобы убрать вращающую силу и садиться на оставшихся двух, выводя их на большую мощность.
Это опять же в теории, поскольку на практике при потере винта сразу начинается болтанка, как на видео и там уже сложно что-то делать, хотя автоматика может и справится.
Wesha
> надо отключать как раз нескоменсированный винт
Ёклмн, Вас в школе не учили, что плоскость можно провести через три точки, а не через две? Как только Вы отключите третий мотор, у Вас останется только две точки, т.е. прямая, и вся конструкция начнёт вокруг неё вращаться, а с учётом того, что моторы жёстко закреплены в раме, коптер начнёт выписывать кульбиты до самого момента столкновения с землёй. (Мы сеёчас говорим о коптере, который рама-с-пропеллерами, в вертолёте всё по-другому — там тяга несущего винта проходит через центр масс).
Andy_Big
А включенный третий мотор будет крутить квадрокоптер в одну сторону вокруг оси, проходящей через два живых мотора. Можно, конечно, пытаться крутить его то в одну, то в другую стороны, чтобы стабилизировать положение, но я сомневаюсь, что инерция мотора и винта позволит делать это достаточно быстро.
Wesha
Третий мотор уже ничего делать не будет — задача началась с того, что один винт из четырёх потерян, а ещё один Вы отключили («надо отключать как раз нескоменсированный винт»). Итого осталось только два мотора.
Andy_Big
Как тогда квадр сядет без катастрофичных последствий на двух винтах? :)
Wesha
Никак. Третий винт отключил не я, а мой оппонент.
Andy_Big
Я запутался в Ваших сообщениях… Так при отказе одного из винтов второй, парный ему, нужно отключать или нет?
Если нужно, то квадр остается с двумя моторами, что резко снижает шансы на мягкую посадку. Если нет, то шансов посадить его без повреждений вообще практически нет.
И как тогда Ваше утверждение «Квад выдерживает потерю одного мотора/винта без «совсем катастрофических» последствий»?
Wesha
Мои посылки:
А) Обычно конструкция мультикоптеров предполагает, что оси винтов жёстко закреплены перпендикулярно некоей плоскости и НЕ могут поворачивасться относительно неё.
Б) Тягу моторов в принципе можно изменять "на лету" (при наличии поддерживающих это контроллеров+софта).
В) Через три точки можно провести толко одну плоскость, через две — сколько угодно.
Из них следует, что:
black_semargl
black_semargl
Если до аварии тяга была по 25%, то после — 49%, 49%, ±1%
Остаток — за счёт парашутирования.
Andy_Big
Насчет отрицательной тяги — вопрос очень хлипкий, так как в большинстве квадрокоптеров винты просто прикручиваются на вал двигателя и вращение будет на откручивание винта. А насчет положительной — это только если повезло и ЦТ находится внутри треугольника рабочих винтов. Иначе он будет набирать горизонтальную скорость из-за наклона. И в любом случае квадрокоптер будет вращаться вокруг вертикальной оси.
black_semargl
При падении винт будет давать отрицательную тягу даже будучи неподвижным
Andy_Big
Ну если квадрик будет падать вверх ногами, то да :)))
black_semargl
Достаточно сопротивления воздуха…
Andy_Big
Которое будет давать «положительную тягу» (вверх) :)
Oz_Alex
Как раз
и приведёт к кульбитам, потому что при отказе мотора №4 пропеллер №2 начнёт вращать дрон вокруг оси 1-3 плюс крутящий момент по горизонтали. А если отключить №2 и центр тяжести дрона будет ниже оси 1-3 (что, как правило, правда), то дрон нормально сможет сесть на двух пропеллерах.Да — это неустойчивое положение, но лучше, чем кувырком.
Wesha
Очень важный комментарий — если ниже и на ней, то да. А если ниже и слегка сдвинут — то можно подобрать тягу каждого из трёх моторов и опять нормально сесть.
Oz_Alex
У меня было 6 дронов, начиная с Syma x5 и заканчивая Mavic 2 Pro, плюс я знаю в «лицо» все дроны DJI и пару от Walkera.
Не могу сходу припомнить ни одного, у которого пропеллеры были бы существенно ниже или хотя бы на уровне корпуса. Обычно всегда выше.
Так что гипотетически надежда есть.
ЗЫ: нашёл один, но это концепт.
Wesha
Я именно про такие и думал (как пример, где ЦТ выше моторов) — на хабре буквально на днях картинка пробегала.
roach1967
Насколько мне попадалась информация, контроллер может отрабатывать аварийные ситуации. В данном случае, если центр оказывается внутри треугольника 1-2-3, то 2-й двигатель заметно уменьшит тягу в соответствии со смещением центра тяжести от оси 1-3. Если центр тяжести оказывается внутри треугольника 1-3-4, то 2-й двигатель меняет вращение, т.е. опять компенсирует смещение центра тяжести.
Да, конечно, это увеличит нагрузку на 1 и 3 движки, но на то и аварийная ситуация: главное спасти квадрокоптер от неуправляемого падения.
kmansoft
Почему же вращаться? Винты у коптера выше чем корпус, силу гравитации поломка винта не отменяет.
Так что корпус «повиснет» на этих двух оставшишся винтах. Тяга, конечно, будет не та — так что только для спуска, но он получится более плавным а не падением.
Ну это в теории…
oracle_and_delphi
У винтов квадракоптера — нерегулируемый шаг винта, а значит не получится скомпенсировать опрокидывающий момент поворачивающий квадрокоптер, через ось проведённую через два неуравновешенных винта. Так что корпус не только «повиснет» на этих двух оставшихся винтах, но и повернётся так что эти винты окажутся почти перпендикулярно земле и потеряют тягу. :(
PS у бикоптеров и части трикоптеров, сами винты имеют изменяемый угол наклона а ля конвертоплан.
kmansoft
Так отключить так чтобы остались «по диагонали».
oracle_and_delphi
Если работают три винта из четырёх, то третий винт лучше совсем не выключать, а оставить на минимальной тяге для подруливания при порывах ветра создавая то положительную, то отрицательную тягу.
Упомянутый мной случай, если вырубились два винта из четырёх и не по диагонали.
Andy_Big
Для компенсации порывов ветра сменой направления вращения винта у двигателя с винтом слишком большая инерция.
Wesha
Так я и сказал: начнёт вращаться вокруг горизонтальной прямой, проходящей через эти два винта, пока не начнёт "на ней" висеть, только проблема в посылке А: как только рама начинает поворачиваться, тяга винтов больше не вертикальна.
DrZlodberg
И даже вполне практически, правда нужен хитрый софт. Думаю рано или поздно эту хрень начнут ставить и на коммерческие аппараты.
MR_VF Автор
Я тоже так думаю. Самые дешевые аппараты сейчас просто падают камнем вниз.
corri
Есть парочка гоночных дронов, все самострой. Если при краше один мотор потерян, то всё ещё можно выровняться и сесть — проверено на практике и не один раз.
Ссори, теоретических выкладок никаких не приведу, просто мнение из практики :)
OnYourLips
Нет, надо 6 моторов, чтобы выход одного из них не имел катастрофических последствий.
schetilin трикоптеры на самом деле имеют сервы, которые тоже надо учитывать, как отдельные моторы. Есть еще и бикоптеры, там 2 дополнительные сервы.
При этом и производительнее, и надежнее и проще, когда моторы одинаковые. Поэтому рынком игрушек будут править квадрокоптеры.
А когда дело касается надежности, то уже гексакоптеры и более. В некоторых странах это даже обязательное требование к аэросъемке в людных местах.
vasimv
Трикоптер банально сложнее в проектировании и сборке. Требуется сервопривод и механика для управления поворотом одного из винтов (для компенсации крутящего момента и управления по yaw), в то время как квадрокоптер собирается буквально из двух палок. Есть, конечно, вариант трикоптера с хвостовым винтом, как у вертолета, по простоте сравнимый с квадрокоптером, но не очень распространен такой.
Ну и есть еще вопрос относительной грузоподъемности. Вес каркаса трикоптера не легче (а то и тяжелее) чем у квадрокоптера, в то время как несущих моторов три, а не четыре — каждый из них должен давать большую тягу, чтобы сравняться по грузоподъемности с квадрокоптером.
kinall
Небольшая поправка: вентильные двигатели известны были уже очень давно, и в управление ими тоже ничего мультикоптеры ничего нового не внесли; что появилось, так это новые материалы: магниты с огромной коэрцитивной силой (очень «сильные», то есть) и аккумуляторы с высокой удельной ёмкостью.
Ну и плюс к этому стали доступны для любителей быстрые и недорогие микроконтроллеры, которые смогли с нужной скоростью просчитывать алгоритмы управления несколькими двигателями.
vasimv
Ну, конкретно любительские коптеры начались, когда распространились недорогие MEMS-датчики. В первых прошивках коптерных контроллеров можно найти поддержку модулей гироскопа/акселерометра выдираемых из Nintendo Wii — вариантов тогда найти их было немного…
MR_VF Автор
Почему же не внесли? Их надо было как-то координировать, ПО разрабатывали долго, и не сразу все получилось. А про аккумуляторы и материалы я написал. Да, про микроконтроллеры вы точно подметили.
kinall
Неточно выразился: не внесли ничего нового в управление самим двигателем — то есть какой ключ когда открывать. А про части координации да, вы правы, алгоритмы делались специально под мультикоптеры.
Andy_Big
Вертолеты покрупнее (500-е и больше) при отказе двигателя (единственного, кстати) довольно успешно сажаются на авторотации :) Даже вроде 450-е сажали так. Более мелким не хватает массы чтобы за счет быстрого снижения в достаточной степени раскрутить набегающим потоком воздуха лопасти :)
Не просто гироскопа, а гироскопа, управляющего углом атаки лопастей, это очень важный момент. Поэтому без этой штуки вертолеты и отказывались нормально летать пока не появились электронные стабилизаторы, управляющие углом атаки лопастей — flybarless схемы вертолетов :) И они не только за счет веса работали, но и за счет аэродинамики.
Вообще-то на видео электричка :)
Гироскопы уже давно ставятся на вертолеты, но довольно долго они применялись только для курсовой стабилизации — управляли хвостовым винтом. И уже гораздо позже начали делать электронную стабилизацию по всем трем осям :)
MR_VF Автор
Вы правы, спасибо
edogs
А насколько эффективно/неэффективно делать смесь квадракоптера с дирижаблем условно говоря? В плане увеличения времени нахождения в воздухе за счет некоторой потери маневренности.
Понятно, что с одной стороны к квадрику привязывается огромная парусная штука и надо сопротивляться ветру, с другой стороны эта парусная штука позволяет не так напрягаться по поводу удержания квадрика в воздухе. Всего полкубовый шарс гелием снизил бы вес килограммового квадрика в 2 раза.
При этом большинство видосов с квадриков это не попытка пролезть в угольное ушко, а подьем на достаточно солидную высоту и относительно неспешное маневрирование или отлет на какое-то вполне недалекое расстояние. Эту цель в принципе оно могло бы закрыть, не? В плюсах была бы плавучесть и меньший риск разбить если что.
Andy_Big
Чтобы вытянуть против даже небольшого ветра объем пол-куба с его парусностью, энергии придется потратить как бы не больше, чем на удержание в воздухе только за счет винтов. А если не вытягивать — придется после почти каждого полета ездить разыскивать место посадки этого дирижаблекоптера :)
edogs
Ради интереса решили попробовать очень грубо посчитать


Уменьшаем на 0.5кг вес — экономим 5 ньютонов, прикинем какой надо ветер что бы получилось невыгодно
Сила ветра
Где p — плотность воздуха = 1.2. Cx — коэффициент лобового сопротивления, допустим с учетом проектирования можно будет уменьшить до автомобильного — 0.3. а площадь сечения 0.5 куба допустим получится 0.3. Вроде так (написали подробно что бы легче было поправить если что).
Тогда имеем
При указанных значениях даст 9.62м/с — критическая скорость ветра, больше — гелиевый суппорт не выгоден, меньше — гелиевый суппорт выгоден. Эта скорость это грань между свежим и сильным ветром.
При этом это именно точка выгодности, т.е. даже при 15м/с квадрик в принципе сможет подняться в воздух, правда это уже будет эквивалентно дополнительным 700гр нагрузки.
Так же придется учитывать очевидно восходящие и нисходящие течения воздуха, грамотное их использование может сильно помочь при удачном стечении обстоятельств.
В общем — свою нишу такое решение могло бы занять, а учитывая что оно могло бы быть монтируемым аксессуаром…
Andy_Big
Если коэффициент лобового сопротивления уменьшить в горизонтальном направлении, то при сохранении объема он увеличится. То есть, для уменьшения КЛС во все стороны по горизонтали нужно делать горизонтально плоскую форму. А это сильно ухудшает вертикальную маневренность и сопротивляемость вертикальным потокам воздуха, не говоря уже о получающихся горизонтальных размерах этого дирижабля :)
Ну и 15 м/с — это практически предел горизонтальной скорости для большинства квадров массой 1-2 кг (не гоночных) :)
edogs
Во все стороны КЛС уменьшать совсем без необходимости, как раз наоборот. Надо двигаться против ветра — развернул квадрик одной стороной, надо воспользоваться ветром — развернул другой.
Поэтому то что 10м/с критическая точка это вообще отлично получается:)То что мы еще не написали выше — если сделать форму крыла, то при ветре можно будет не просто ему сопротивляться, но и пользоваться им для создания вертикальной силы на подьем. Так что все даже чуть лучше.
Andy_Big
А если надо двигаться под углом к ветру? А если ветер меняется? :)
Ну и квадрику чтобы двигаться по горизонтали нужно наклоняться в сторону движения. А если ставить дополнительные моторы для горизонтального движения, то получаем… дирижабль, а не квадрик :)
edogs
Иииии… мы возвращаемся к первому нашему комменту «смесь квадракоптера с дирижаблем»©
troll_face
Кстати, очень неплохая идея, по-моему! А если использовать водород и легкий обтекаемый корпус типа «летающее крыло», то вполне получится избавиться и от «огромной парусной штуки» с проблемами в управлении.
Достаточно компенсировать, хотя-бы, 70% веса коптера, чтобы добиться выдающихся результатов по времени полета. Единственно, что смущает, это герметичность самого «дирижабля», но, как мне кажется, современные материалы могут это решить (но я не специалист).
MR_VF Автор
В самых маленьких моделях так и делают. Баллон компенсирует вес, но не весь. Поднимают его моторы. Дирижабль как бы постоянно падает, а если надо подняться, включают двигатели.
Сама подвеска снизу, кстати, слегка похожа на квадрокоптер:
troll_face
Эта игрушка — не совсем о том (скорее, совсем не о том). Как детская игрушка такой дирижабль прекрасен: нет вращающихся винтов, абсолютно безопасен, а в форме рыбы/птицы, использующий «виляющий» хвост для движения вперед, весьма забавен (рекомендую, мои дети с удовольствием играли с таким). Но это вовсе не коптер, от слова совсем.
Как я написал выше, именно коптер с достаточно большим, но плоским и обтекаемым корпусом, заполненный водородом (намного лучше по подъемной силе, чем гелий), который компенсирует определенную часть веса, может быть весьма любопытной инновацией.
Но тут нужно считать (или экспериментировать), насколько возрастут затраты энергии на удержание такого коптера на месте, для съемки — ведь парусность у него будет, все-таки выше, чем у обычного коптера.
То-бишь, по сути, речь идет о чем-то наподобие
MR_VF Автор
Но тут только корпус из толстой пены, он только ухудшает полетные свойства. В этом смысле мое видео мне представляется более подходящим.
Теоретически, это сделать не сложно: надо просто спаять из полиэтилена, как вариант, оболочку с проемами для винтов и приклеить к обычному коптеру.
Только, по-моему, подъемная сила будет совсем слабой для такого веса, она не компенсирует даже половины силы тяги, требуемой от пропеллеров.
troll_face
Да я не про корпус, а про форму! (просто привел пример, как коптер подобной формы может летать). Если корпус собрать из углепластика, внутрь поместить газонепроницаемый баллон с водородом, моторы с винтами вынести за пределы корпуса (равно, как и управляющую плату с батареей), то, imho, вполне можно компенсировать процентов 60-70 веса такой конструкции, и добиться увеличенного в два раза времени полета, что важно для некоторых применений.
Ваше же видео показывает дирижабль, а не коптер, то-бишь ЛА легче воздуха. У моих детей есть подобная игрушка (только там сделано еще остроумнее, вообще винтов нет никаких), это совершенно не то. Коптер должен быть тяжелее воздуха, иначе придется полностью переписывать схему управления.
edogs
К этой тематике стоит вероятно еще добавить тематику проводных коптеров.
По настоящему серьезных проектов на эту тему не встречали, но вот например tethered.solutions — вполне бюджетно до 300 метров вверх запускают.
troll_face
Для некоторых применений, imho, вполне себе идея. Например, для радиолюбителей-коротковолновиков как способ получить ну очень высокую антенну.
edogs
Неплохая идея. Можно так же сотовую антенну на даче можно неслабо так поднять в случае экзотического рельефа местности или помех на земле. Надо посидеть в интернете — запустил коптер с антенной и вуаля.
MR_VF Автор
Или чтобы поймать молнию
edogs
Тоже мысль ru.wikipedia.org/wiki/%D0%93%D1%80%D0%BE%D0%B7%D0%BE%D0%B2%D0%B0%D1%8F_%D1%8D%D0%BD%D0%B5%D1%80%D0%B3%D0%B5%D1%82%D0%B8%D0%BA%D0%B0
mmMike
Странно, что совсем не упоминается ключевой фактор — появление дешевых гироскопов и контроллеров. Вертолет с коллекторным двигателем — да легко. Были такие, да и сейчас есть.
А вот вручную управлять полетом квадрокоптера (полностью вручную без контроллера и гироскопа) — просто не реально.
MR_VF Автор
Почему же? Написано как раз именно про это.
mmMike
Ну я из своего опыта первых экспериментов и попыток построить летающую платформу
Фраза
Близка к моему опыту, но не раскрывает деталей. Вот как раз когда появились на ebay первые интегральные гироскопы — только тогда и начало что то получатся (у меня, как минимум).
Вот даже один в руках верчу как раз сейчас. Платка с IDG300A и ATMega. Уже как "память" не более.
К сожалению (а может и нет) сейчас уже DIY для дронов — смысла не имеет. На поток дроны и их ПО поставлены.
MR_VF Автор
Ну, здесь имелась в виду электроника, включая гироскопы. Хорошо, что подметили.
mahabala
Знаете, технология Дронов несет тихую революцию — слабо заметную простому обывателю. В кинематографе, например, стали доступны новые виды ракурсов(а значит и подача видео контента), для внимательного взгляда во многих новых фильмах сразу заметно, что «вот это» без дрона невозможно снять.
Но есть еще революция в геодезии и картографии. Чтобы снять сотни гектар плотной(сложной) застройки(леса, горы, поля, города), нужно просто дать дрону задание и он сделает все полевые работы на которые требовались дни и недели — за пару часов в автономном порядке. А так же способен четко определись каждое сухое дерево в лесу или деревья определенной породы просто пролетев над лесом. Про военных так вообще молчу.
Сейчас дроны эволюционирую настолько быстро, что даже профессионалам нужно четко отслеживать пульс взрывного роста и новые возможности по применению. Для простого профессионала эта технология несет как новые возможности так и многократное облегчение время-затрат(но при многократном увеличении сложности вхождения в профессию).
MR_VF Автор
Совершенно верно, технологии не стоят на месте, облегчая жизнь.
Wesha
А также (раз речь зашла о военных) и смерть.
MR_VF Автор
Да, вы правы.
nonpar
Я бы выделил следующие ключевые физические технологии, которым коптеры обязаны своим появлением:
— аккумуляторы с высокой удельной емкостью;
— «супермагниты» с прежде недостижимыми свойствами (обеспечивают легкие роторы для бесколлекторных моторов);
— мощные транзисторы MOSFET c низким сопротивлением канала и наносекундными задержками срабатывания (позволяют сделать управляемые ими обмотки моторов легкими и получить высокую мощность/КПД при низковольтном питании).
Перечисленные технологии сделали достижимыми требуемые массо-мощностные показатели, без чего коптер бы просто не оторвался от земли.
С другой стороны, появление быстрых 32-разрядных микроконтроллеров позволило использовать алгоритмы, обеспечивающие управление статически неустойчивыми аэродинамическими системами. А прогресс в области цифровой связи и GPS обеспечил возможности для навигации и дистанционного управления.
vasimv
8-разрядные микроконтроллеры вполне справлялись с неустойчивостью и навигацией (на atmega328p приходилось немного потрахаться с размером прошивки с GPS, не влезающей в его небольшой флеш, но получалось).
nonpar
В AVR и PIC 8-разрядность весьма условна; длина инструкций там 12-16 бит. Но сейчас это уже не мэйнстрим, насколько я знаю.
stalinets
Вот ещё вдвое резче! Представляю глаза инженера из вертолётного КБ годах в 80-х, если бы он увидел такое.
troll_face
Andy_Big
Без изменяемого шага винтов — не сделает :)
oracle_and_delphi
Изменение шага одного большого винта можно эмулировать изменением оборотов множества маленьких винтов — при наличии подходящего софта хорошо справляющегося с этим.
Andy_Big
Шаг винта меняется от максимально отрицательного до максимально положительного за долю секунды. За счет этого на подобных вертолетах возможно исполнение таких фигур как зависание в вертикальном положении с небольшими быстрыми колебаниями туда-сюда, резкая остановка (по оси винта) и т.п. Винт сможет за долю секунды изменить направление вращения? Сможет коптер висеть в вертикальном положении?
oracle_and_delphi
Значит кроме софта нужна ещё и механика.
Andy_Big
Правильно — нужна механика изменения шага винтов :)
oracle_and_delphi
Если очень нужна отрицательная тяга, то можно просто добавить винт создающий отрицательную тягу.
Если желаем иметь именно четыре винта, то можно сделать три винта тянущих вверх, и четвёртый тянущий вниз.
Andy_Big
С изменением шага винта это все равно не сравнится.
roller
Ни одного видоса где у октокоптера отстреливают винт и он не падает — я еще не видел.
SandroSmith
В качестве иллюстрации отлично подойдёт вот это видео:
Andy_Big
Нет, тут не совсем тот случай. На этом видео квадрокоптеру укоротили два противоположных винта. Он не потерял полностью один из винтов, просто тяга двух винтов резко упала. Но осталась достаточной для стабилизации горизонтального положения. Это не то же самое, что полная потеря одного из винтов :)
oracle_and_delphi
Чтобы коптер не упал от потери одного винта, у него должен быть софт умеющий это компенсировать.
Andy_Big
И софт и соответствующее железо.
SandroSmith
Я практически уверен, что они не стали эксплуатировать остаточную тягу огрызков и создали алгоритм полёта чисто на двух винтах. Соответственно, ситуацию «отказал один из винтов» легко привести к «работают только два». Но да, софт конечно должен быть соответствующий.
Andy_Big
Тогда бы они продемонстрировали «дуокоптер» именно с двумя винтами :) А тут, я уверен, коптер использует и эти огрызки для горизонтальной стабилизации. А демонстрируется, как я понял, способность коптера ориентироваться в пространстве даже с таким вращением вокруг вертикальной оси.
oracle_and_delphi
На двух винтах квадрокоптер ещё может сесть, но уже не может маневрировать.
Бикоптеры с двумя винтами конструктивно устроены подобно конвертопланам = имеют наклоняемые двигатели.
Чтобы квадракоптер не терял манёвренности без четвёртого винта — необходима возможность создания отрицательной тяги вращением винта в обратную сторону, что большинство квадракоптеров не поддерживает.
SandroSmith
Нам не нужно не терять манёвренность. Нам нужно при отказе одного из двигателей хоть как-то безопасно приземлиться. Что, как показали, в принципе возможно.
Вопрос можно ли это сделать при полной пропаже тяги, согласен, остаётся открытым.