
Разбирая одну олимпиадную задачу мы отправимся по петляющим коридорам генерации лабиринтов и их прохождения, а также увидим, что на языке Julia простота реализаций алгоритмов граничит с их псевдокодом.
Задача
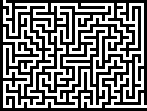
Лабиринт представляет собой клетчатый квадрат 10 на 10, в некоторых клетках стоят препятствия, а в одной клетке находится выход. Робот находится в таком лабиринте и может выполнять 4 команды: сдвинуться на одну клетку вниз, вверх, вправо или влево. Если робот пытается выйти за границы лабиринта или перейти в клетку с препятствием, то он остается на месте. Если робот попадает в выход, то он выходит из лабиринта и дальнейшие команды игнорирует. Напишите программу для робота, исполняя которую робот в любом случае доберется до выхода вне зависимости от клетки, в которой он находился вначале. Программа должна состоять из не более чем 1000 команд.

Формат ввода
Ввода нет. Нужно написать программу для одного конкретного указанного в условии
лабиринта.
Версия лабиринта, которую можно скопировать. 0 — свободная клетка, 1 — препятствие, x —
выход.
0011010011
0100001000
0110x00000
0010000100
0000111000
0000100100
0000010010
0100101010
0011001010
1000011000Формат вывода
Одна строка, состоящая из символов U,D,R,L длины не более 1000
Подготовка
Тем, кто не работал с графикой в Julia нужно докачать пакеты
using Pkg
Pkg.add("Plots")
Pkg.add("Colors")
Pkg.add("Images")
Pkg.build("Images") # если сам не отбилдитсяУдобней всего работать в Jupyter, так как картинки будут отображаться непосредственно по ходу работы. Здесь можно найти про установку, а также введение и задания для начинающих.
В условии нашей задачи есть версия лабиринта для копирования
S0 = "0011010011
0100001000
0110x00000
0010000100
0000111000
0000100100
0000010010
0100101010
0011001010
1000011000"Чтоб рисовать лабиринт, нужно составить матрицу. Так как не хочется расставлять пробелы вручную, поработаем со строкой:
S1 = prod(s-> s*' ', '['*S0*']')
# prod(fun, arr) перемножает элементы массива arr
# прогоняя их через функцию fun
# в julia операция * склеивает строки
"[ 0 0 1 1 0 1 0 0 1 1 \n 0 1 0 0 0 0 1 0 0 0 \n 0 1 1 0 x 0 0 0 0 0 \n 0 0 1 0 0 0 0 1 0 0 \n 0 0 0 0 1 1 1 0 0 0 \n 0 0 0 0 1 0 0 1 0 0 \n 0 0 0 0 0 1 0 0 1 0 \n 0 1 0 0 1 0 1 0 1 0 \n 0 0 1 1 0 0 1 0 1 0 \n 1 0 0 0 0 1 1 0 0 0 ] "Заменив несуразную букву х на цифру и отпарсив строку, получим целочисленную матрицу задающую наш лабиринт. Затем, для большего удобства, поменяем единички на нули, а нули на единицы, и обнесем лабиринт стеной:
S2 = replace(S1, 'x'=>'9')
M0 = S2 |> Meta.parse |> eval
m,n = size(M0)
M1 = replace(M0, 1=>0, 0=>1)
M = zeros(Int64,m+2,n+2)
for i in 2:m+1, j in 2:n+1
M[i,j] = M1[i-1,j-1]
end
M # Maze map matrix
12?12 Array{Int64,2}:
0 0 0 0 0 0 0 0 0 0 0 0
0 1 1 0 0 1 0 1 1 0 0 0
0 1 0 1 1 1 1 0 1 1 1 0
0 1 0 0 1 9 1 1 1 1 1 0
0 1 1 0 1 1 1 1 0 1 1 0
0 1 1 1 1 0 0 0 1 1 1 0
0 1 1 1 1 0 1 1 0 1 1 0
0 1 1 1 1 1 0 1 1 0 1 0
0 1 0 1 1 0 1 0 1 0 1 0
0 1 1 0 0 1 1 0 1 0 1 0
0 0 1 1 1 1 0 0 1 1 1 0
0 0 0 0 0 0 0 0 0 0 0 0В матрице
length(M)
144клетки, и из них
sum(M)-9
70по которым можно ходить, то есть — потенциальных стартовых позиций. Изобразить результат можно построив двумерную гистограмму
using Plots
heatmap(M, yaxis = :flip) # flip - инвертирует ось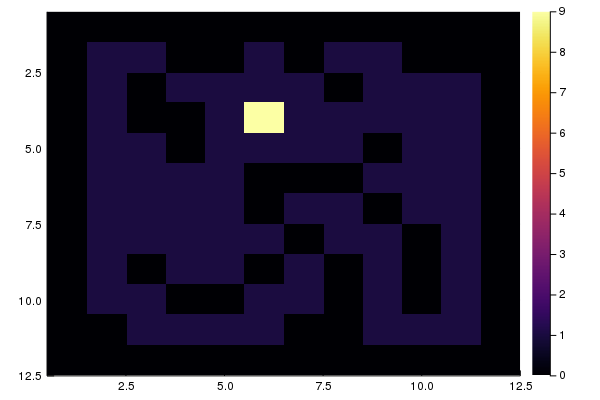
Проверка решения
Прежде всего, нужно отработать процедуры, которые будут проверять правильность предложенного решения. Зададим составной тип Point, чтобы пользоваться терминологией точек и координат:
mutable struct Point
x::Int64 # vertical
y::Int64 # horisont
Point(x, y) = new(x, y)
endА теперь нужно научиться переводить последовательность команд понятных для робота в код.
Мысль довольно проста: есть стартовая координата, приходит строка с алгоритмом, говорящим как ходить. Берем по одной буковке и смотрим, на какую из соседних клеток наступать. К текущей координате прибавляем значение которое хранится в этой клетке. То есть, если там ноль (стена), мы никуда не сдвинулись, иначе — сделали шажок в требуемом направлении.
Можно воспользовавшись мощью метапрограммирования заменить поступающую последовательность направлений на громоздкий однообразный код и выполнить его
S = "RRLDUURULDDRDDRRRUUU"
S1 = replace(S , "R"=>"c.y+=M[c.x, c.y+1];")
S1 = replace(S1, "L"=>"c.y-=M[c.x, c.y-1];")
S1 = replace(S1, "U"=>"c.x+=M[c.x+1, c.y];")
S1 = replace(S1, "D"=>"c.x-=M[c.x-1, c.y];")
# с - start point
Sp = eval( Meta.parse(S1) )Но этот способ несет за собой ряд неудобств, поэтому воспользуемся классическими условными операторами. Кстати, в том что выход обозначен цифрой 9 есть небольшая хитрость: чтоб не проверять каждую клетку, а не выход ли это, мы инициируем передвижение прибавляя значение хранящееся в конкретной клетке. Когда робот наступает на выход к его координате присуммируется заведомо большое число, такое что робот вылетает за границы массива, что можно отловить как ошибку с помощью блока:
try
# если здесь произошла ошибка
catch
# то выполняются действия из этого поля
endТаким образом реализуем функцию, которая будет проверять, достигает ли робот выхода стартуя из точки c выполняя команды из строки str:
function isexit(str, c)
scatter!([c.y],[c.x])
try
for s in str
if s == 'R'
c.y+=M[c.x, c.y+1];
elseif s == 'L'
c.y-=M[c.x, c.y-1];
elseif s == 'U'
c.x+=M[c.x+1, c.y];
elseif s == 'D'
c.x-=M[c.x-1, c.y];
else
println("Error! Use only R, L, U, D")
end
end
catch
return true
end
return false
endСоберем функцию, которая переберет все стартовые позиции
function test(Str)
k = 0
for i in 2:m+1, j in 2:n+1
if M[i,j] == 1
c = Point(i, j)
a = isexit(S,c)
if a
k +=1
#println(a)
end
end
end
println(k, " test completed from ", sum(M)-9)
endПроверим команды:
S = "RRRLDUUURRRUUURRRRLLLRRUULDDDDRRRRDDDRRRUUU"
heatmap(M, yaxis = :flip)
test(S)
# 10 test completed from 70
plot!(legend = false)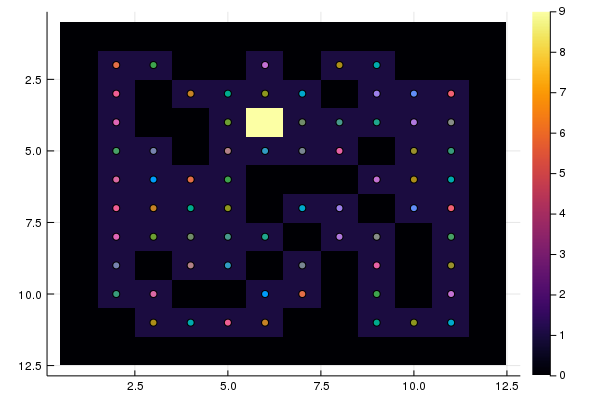
Опробованы все стартовые точки, и только 10 привели к выходу. Нужно построить маршруты от каждой точки до выхода.
Прежде чем погрузиться в генерацию и прохождение лабиринтов, сохраним наши результаты. Воспользуемся пакетом Images.jl предоставляющим множество возможностей в области обработки изображений (наглядный пример). Одним из его вспомогательных инструментов является пакет Colors.jl расширяющий возможности Джулии работой с цветами.
using Images
clrs(x) = x==9 ? RGB(1.,0.5,0) : RGB(x,x,x)
maze = clrs.(M)
# maze = Gray.(maze)
# save("D:/dat/maze12x12.png", maze)
Поиск в глубину
Реализована идея из статьи на хабре.
Идея проста: создаем сетку из стен
M = 10
N = 10
A = [ i&j&1 for i in 0:N, j in 0:M ] # isodd(i) & isodd(j) & 1
Gray.(A) # from Images.jl
затем, петляя пробиваем маршрут и ответвления. Зададим функцию находящую соседние непосещенные области (будем обозначать их, скажем, двойкой) и возвращающую одного из этих соседей (если непосещенных соседей нет — возвращает флаг-точку):
function neighbours2(A,p, n, m)
nbrs = [Point(p.x, p.y+2), # up
Point(p.x, p.y-2), # down
Point(p.x-2, p.y), # left
Point(p.x+2, p.y)] # right
goal = []
for a in nbrs
if 0<a.x<=n && 0<a.y<=m && A[a.x,a.y]==2
push!(goal, a)
end
end
length(goal) != 0 ? rand(goal) : Point(-1,-1)
endСтены будем разбивать так:
function breakwall(A, newp,oldp)
# координата стены:
x = (newp.x + oldp.x) >> 1 # побитовый сдвиг
y = (newp.y + oldp.y) >> 1
A[x,y] = 1
endАлгоритм
- Сделайте начальную клетку текущей и отметьте ее как посещенную.
- Пока есть непосещенные клетки
??1. Если текущая клетка имеет непосещенных «соседей»
????1. Протолкните текущую клетку в стек
????2. Выберите случайную клетку из соседних
????3. Уберите стенку между текущей клеткой и выбранной
????4. Сделайте выбранную клетку текущей и отметьте ее как посещенную.
??2. Иначе если стек не пуст
????1. Выдерните клетку из стека
????2. Сделайте ее текущей
??3. Иначе
????1. Выберите случайную непосещенную клетку, сделайте ее текущей и отметьте как посещенную.
function amazeng(n, m)
M = [ 2(i&j&1) for i in 0:n, j in 0:m ];
p = Point(2,2) # стартовая точа
lifo = [] # пустой массив
push!(lifo, p)
#i = 0
while length(lifo) != 0 # пока не опустеет стек
M[p.x,p.y] = 1 # отметим белым посещенную клетку
np = neighbours2(M, p, n, m) # new point
# если нет соседей - идём обратно
if np.x == np.y == -1
p = pop!(lifo)
else
push!(lifo, p)
breakwall(M, np, p)
p = np
#i+=1
#maze = Gray.(M/2)
#save("D:/dat/maze$i.png", maze)
end
end
M[1,2] = 1 # вход
M[n,m+1] = 1 # выход
Gray.(M)
endlbrnt = amazeng(36, 48)
# save("D:/dat/maze111.png", lbrnt)
Алгоритм поиска пути бэктрекингом:
- Сделайте начальную клетку текущей и отметьте ее как посещенную.
- Пока не найден выход
??1. Если текущая клетка имеет непосещенных «соседей»
????1. Протолкните текущую клетку в стек
????2. Выберите случайную клетку из соседних
????3. Сделайте выбранную клетку текущей и отметьте ее как посещенную.
??2. Иначе если стек не пуст
????1. Выдерните клетку из стека
????2. Сделайте ее текущей
??3. Иначе выхода нет
Соседей ищем наоборот и в радиусе одной клетки, а не через одну:
function neighbours1(A, p, n, m)
nbrs = [Point(p.x, p.y+1), # up
Point(p.x, p.y-1), # down
Point(p.x-1, p.y), # left
Point(p.x+1, p.y)] # right
goal = []
for a in nbrs
if 0<a.x<=n && 0<a.y<=m && A[a.x,a.y]==1
push!(goal, a)
end
end
length(goal) != 0 ? rand(goal) : Point(0,0)
endЗададим алгоритм прохождения лабиринта с отрисовкой маршрута и неудачных попыток
function amazeng(img, start, exit)
M = Float64.(channelview(img))
n, m = size(M)
p = start
M[exit.x,exit.y] = 1
lifo = []
push!(lifo, p)
while p.x != exit.x || p.y != exit.y
M[p.x,p.y] = 0.4
np = neighbours1(M, p, n, m)
if np.x == np.y == 0
M[p.x,p.y] = 0.75
p = pop!(lifo)
# числа - оттенки серого, чтоб выделить маршрут
# можно поставить функции задающие цвета
else
push!(lifo, p)
p = np
end
end
Gray.(M)
endКак некоторые заметили, функция называется также, как и та, что алгоритмы генерирует (Множественная диспетчеризация). При вызове ее с двумя числами, отработает метод конструирования лабиринта, если же вызвать, задав в качестве аргумента изображение и две точки (координаты входа и выхода), то на выходе получим изображение с пройденным лабиринтом
img0 = load("D:/dat/maze111.png")
amazeng(img0)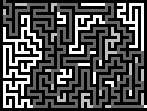
Отпробуем на нашем лабиринте:
img0 = load("D:/dat/maze12x12.png")
n, m = size(img0)
amazeng(img0, Point(11,9), Point(4,6) )
Даже если модифицировать функцию, чтоб запоминался маршрут, всё равно из-за открытых пространств алгоритм показывает себя неэффективным. Зато лабиринты выходят отличные.
Рандомизированный алгоритм Прима
Уж как начнешь рисовать лабиринты, так и не остановиться. Выполним еще один интересный алгоритм:
- Начать с сетки, полной стен.
- Выберите ячейку, отметьте ее как часть лабиринта. Добавьте стены ячейки в список стен.
- Пока в списке есть стены:
- Выберите случайную стену из списка. Если посещена только одна из двух ячеек, которые разделяет стена, то:
- Сделайте стену проходом и отметьте непосещенную клетку как часть лабиринта.
- Добавьте соседние стены ячейки в список стен.
- Убрать стену из списка.
- Выберите случайную стену из списка. Если посещена только одна из двух ячеек, которые разделяет стена, то:
neighbors(p::Point) = [Point(p.x, p.y+1), # up
Point(p.x, p.y-1), # down
Point(p.x-1, p.y), # left
Point(p.x+1, p.y)] # right
function newalls!(walls, p, maze, n, m)
nbrs = neighbors(p)
for a in nbrs
if 1<a.x<n-1 && 1<a.y<m-1 && !maze[a.x,a.y]
push!(walls, a) # Добавьте соседние стены ячейки в список стен.
end
end
end
function breakwall!(p, maze, n, m)
nbrs = neighbors(p)
# если среди соседей есть белая клетка
if sum( a-> maze[a.x,a.y], nbrs) == 1
for a in nbrs
if maze[a.x,a.y]
# true = белая
p.x == a.x ? nx = p.x : p.x>a.x ? nx = p.x+1 : nx = p.x-1
p.y == a.y ? ny = p.y : p.y>a.y ? ny = p.y+1 : ny = p.y-1
maze[p.x,p.y] = true # соединить коридоры
maze[nx,ny] = true
p.x = nx
p.y = ny
return true
end
end
else
return false
end
end
function prim(n, m)
M = falses(n,m); # всё заполнено стенами
p = Point(2, 2)
M[p.x,p.y] = true
walls = []
newalls!(walls, p, M, n, m)
while length(walls) != 0
p = splice!( walls, rand(1:length(walls)) )
if breakwall!(p, M, n, m)
newalls!(walls, p, M, n, m)
end
end
M
endprimaze = prim(19,19);
Gray.(primaze)
Получается более ветвисто и не менее потрясно, особенно процесс сборки.
А теперь имплементируем наиболее распространенный алгоритм нахождения кратчайшего маршрута:
Метод A*
- Создается 2 списка вершин — ожидающие рассмотрения и уже рассмотренные. В ожидающие добавляется точка старта, список рассмотренных пока пуст.
- Для каждой точки рассчитывается — примерное расстояние от точки до цели.
- Из списка точек на рассмотрение выбирается точка с наименьшим . Обозначим ее .
- Если — цель, то мы нашли маршрут.
- Переносим из списка ожидающих рассмотрения в список уже рассмотренных.
- Для каждой из точек, соседних для (обозначим эту соседнюю точку ), делаем следующее:
- Если уже находится в рассмотренных — пропускаем ее.
- Если еще нет в списке на ожидание — добавляем ее туда.
- Если список точек на рассмотрение пуст, а до цели мы так и не дошли — значит маршрут не существует.
Для начала зададим класс "точка" которая будет знать, как далеко она от цели:
mutable struct Point_h
x::Int64 # horisont
y::Int64 # vertical
h::Float64
Point_h(x, y) = new(x, y, 0.)
endТеперь доопределим для структуры операцию сравнения, метод для установления наличия элемента в массиве, а также функции изъятия элемента, нахождения расстояния между точками и перечисления соседей:
import Base: in, ==
==(a::Point_h, b::Point_h) = a.x==b.x && a.y==b.y
function in(p::Point_h, Arr::Array{Point_h,1})
for a in Arr
if a == p
return true
end
end
return false
end
function splicemin!(Arr)#::Array{Point_h,1}
i = argmin( [a.h for a in Arr] )
splice!(Arr, i)
end
dista(u,v) = hypot(v.x-u.x, v.y-u.y) # <=> sqrt( (v.x-u.x)^2 + (v.y-u.y)^2 )
neighbors(p::Point_h) = [Point_h(p.x, p.y+1), # up
Point_h(p.x, p.y-1), # down
Point_h(p.x-1, p.y), # left
Point_h(p.x+1, p.y)] # rightКак всегда, непонятные операторы можно разъяснить с помощью команды ?, например ?splice, ?argmin.
И, собственно, сам метод A*
function astar(M, start, final)
# хорошая точка - не стена и не за границами
isgood(p) = 1<p.x<n && 1<p.y<m && M[p.x,p.y] != 0
n, m = size(M)
# как далеко от старта до цели
start.h = dista(start,final)
closed = []
opened = []
push!(opened, start)
while length(opened) != 0
X = splicemin!(opened)
if X in closed
continue
end
if X == final
break
end
push!(closed, X)
nbrs = neighbors(X)
ygrex = filter(isgood, nbrs)
for Y in ygrex
if Y in closed
continue
else
Y.h = dista(Y, final)
push!(opened, Y)
end
end
end
# возвращаем все посещенные
closed # return
endЗагружаем картинку с лабиринтом и представляем ее в виде матрицы:
img0 = load("D:/dat/maze0.png")
mazematrix = Float64.(channelview(img0))И строим маршрут до выхода из произвольной точки:
s = Point_h(11,9) # start
f = Point_h(4,6) # finish
M = copy(mazematrix)
route = astar(M, s, f)
i = 1
for c in route
# рисует маршрут
M[c.x,c.y] = 0.7
#save("D:/dat/Astar$i.png", M)
i+=1
end
Gray.(M)
А поиск из всех позиций выглядит так:

Видно, что агент прёт всегда стремится в сторону выхода и частенько заворачивает в тупики, что порождает лишние шаги, а запоминается-то весь маршрут. Это избегается чуть более сложным вариантом алгоритма А*
- Создается 2 списка вершин — ожидающие рассмотрения и уже рассмотренные. В ожидающие добавляется точка старта, список рассмотренных пока пуст.
- Для каждой точки рассчитывается . — расстояние от старта до точки, — примерное расстояние от точки до цели. Так же каждая точка хранит ссылку на точку, из которой в нее пришли.
- Из списка точек на рассмотрение выбирается точка с наименьшим . Обозначим ее .
- Если — цель, то мы нашли маршрут.
- Переносим из списка ожидающих рассмотрения в список уже рассмотренных.
- Для каждой из точек, соседних для (обозначим эту соседнюю точку ), делаем следующее:
- Если уже находится в рассмотренных — пропускаем ее.
- Если еще нет в списке на ожидание — добавляем ее туда, запомнив ссылку на и рассчитав (это + расстояние от до ) и .
- Если же в списке на рассмотрение — проверяем, если + расстояние от до , значит мы пришли в точку более коротким путем, заменяем на + расстояние от до , а точку, из которой пришли в на .
- Если список точек на рассмотрение пуст, а до цели мы так и не дошли — значит маршрут не существует.
Но даже с лишними шагами наш вариант вполне укладывается в ограничение задачи, так что модификации программ будет вашим домашним заданием.
До конца олимпиады осталось всего-ничего, а нам нужно еще научиться переводить результаты работы наших алгоритмов в команды вида "RRLUUDL..."
И вот после всех этих хождений по лабиринтам, можно предположить, что решение гораздо проще. На самом деле простой вариант напрашивается сразу, но уж очень хотелось наделать красивых штук.
Если расположить нашего исполнителя в открытой местности и инициировать случайные блуждания, то он будет колебаться вблизи своей стартовой позиции. Но вот с введением стенок, часть направлений начнет гаситься, степеней свободы станет меньше, и с такими же входными данными агент переместится на большее расстояние.
Вот наш вариант проверки команд на пригодность к вызволению робота из лабиринта:
M = [ 0 0 0 0 0 0 0 0 0 0 0 0
0 1 1 0 0 1 0 1 1 0 0 0
0 1 0 1 1 1 1 0 1 1 1 0
0 1 0 0 1 9 1 1 1 1 1 0
0 1 1 0 1 1 1 1 0 1 1 0
0 1 1 1 1 0 0 0 1 1 1 0
0 1 1 1 1 0 1 1 0 1 1 0
0 1 1 1 1 1 0 1 1 0 1 0
0 1 0 1 1 0 1 0 1 0 1 0
0 1 1 0 0 1 1 0 1 0 1 0
0 0 1 1 1 1 0 0 1 1 1 0
0 0 0 0 0 0 0 0 0 0 0 0]
mutable struct Point # point
x::Int64 # vertical
y::Int64 # horisont
Point(x, y) = new(x, y)
end
function isexit(str, c)
try
for s in str
if s == 'R'
c.y+=M[c.x, c.y+1];
elseif s == 'L'
c.y-=M[c.x, c.y-1];
elseif s == 'U'
c.x+=M[c.x+1, c.y];
elseif s == 'D'
c.x-=M[c.x-1, c.y];
else
println("Error! Use only R, L, U, D")
end
end
catch
return true
end
return false
end
function test(Str)
k = 0
n, m = 10,10
for i in 2:m+1, j in 2:n+1
if M[i,j] == 1
c = Point(i, j)
a = isexit(S,c)
if a
k +=1
#println(a)
end
end
end
println(k, " test completed from ", sum(M)-9)
endТеперь достаточно генерировать случайные строки, пока не получится та, что сработает для всех стартовых позиций:
using Random
S = randstring("RLUD",200)
"RDRRRDLRLUULURUDUUDLLLLLULLUDRRURDLDLULLRLUUUDURUUUULRUDUURUUDLRLLULRLUDRRLRRULLDULRRRRULRLLDULRLDRUDURDRUUDUUDDDDDLURRRRDRDURRRDDLLDUURRRLDRUDLRLLRDDRLRRRDDLLLRUURDRLURDLLUULLLLUURLLULUDULDDLDLLRLDUD"
test(S)
41 test completed from 70К тому же, можно было и не заморачиваться на счет теста. Достаточно было прочитать задание и сгенерировать рандомную максимально допустимую условием строку:
for i in 1:20
S = randstring("RLUD",1000)
test(S)
end
70 test completed from 70
70 test completed from 70
70 test completed from 70
70 test completed from 70
55 test completed from 70#
65 test completed from 70#
70 test completed from 70
70 test completed from 70
38 test completed from 70#
70 test completed from 70
70 test completed from 70
56 test completed from 70#
70 test completed from 70
70 test completed from 70
70 test completed from 70
16 test completed from 70#
70 test completed from 70
24 test completed from 70#
70 test completed from 70
70 test completed from 70То есть с вероятностью в 70% строка прошла бы тесты.
На этом всё. Желаю читателю удачного рандома, терпения и интуиции на очевидные решения.
Для любознательных — ссылки для углубления в тему:
Комментарии (12)

lohmatij
17.05.2019 12:27+1Интересная задача.
Теперь руки чешутся написать алгоритм нахождения минимальной строки для заданного лабиринта.azazar
17.05.2019 19:24Алгоритм волны вроде как раз и выдаёт самый короткий путь

Yermack Автор
19.05.2019 11:24Алгоритмы Jump point search, A*, BFS и тд предназначены находить кратчайший путь от точки до точки (поиграйтесь с симуляцией по ссылке выше). Чувак имеет ввиду, что хочется найти минимальную строку команд, которая справится с задачей. Есть подозрение, что такая строка получится при реализации алгоритма первого комментатора
Deosis
20.05.2019 08:32+1Простая конкатенация не даст минимальную строку. Пять команд влево выведут к финишу из 5 ячеек справа от него. При конкатенации понадобилось бы написать 15 команд влево (1 — для первой ячейки, 2 — для второй и т.д.)
Стоит смотреть алгоритмы синхронизации конечных автоматов, так как описание задачи практически одинаково: Для заданного КА найти последовательность команд, переводящую КА из произвольного состояния в одно определенное.
MarazmDed
17.05.2019 13:05+1Когда робот наступает на выход к его координате присуммируется заведомо большое число, такое что робот вылетает за границы массива, что можно отловить как ошибку с помощью блока:
try # если здесь произошла ошибка catch # то выполняются действия из этого поля end
Охх, какая кулебяка получается :) Что показывает, как далеко отстоит спортивное программирование от промышленного…
Нет, это, наверное, не плохо для ОЛИМПИАДНОГО примера отлавливать завершение работы исключением, но если такое в промышленный код внедрить — уже, извиняюсь, решение не фонтан:
1) Инструмент используется не по назначению. Страдает стиль и читаемость кода
2) А что, если в коде закрадется ошибка, которая приведет к ровно тому же исключению?Yermack Автор
17.05.2019 13:13Конечно же этот вариант был предложен
для прикола, чтобы упомянуть блок трай-кеч, а так нормальные люди просто зададут функциюisexit(point)::bool
khim
18.05.2019 06:10Я не знаю — идеоматично ли подобное поведение в Julia, но говорить, что подобное никогда не бывает в промышленном программировании я бы не стал. Вы когда-нибудь обращали внимание на интерфейс итератора в Python?
Хотя, конечно, ловить все исключения — это жесть, да, согласен…MarazmDed
19.05.2019 22:43Вы когда-нибудь обращали внимание на интерфейс итератора в Python?
В статье предлагается ловить out of range. Что, согласитесь, далеко не специально выделенный класс исключения. Ну и, на мой взгляд, в PHP — сомнительная идея реализована.
darnley
.Очень много всего. А правильное и естественное решение звучит так:
Предположим, что мы начинаем в (0, 0). Добавим в строчку-ответ кратчайший путь от (0, 0) до выхода (найденный поиском ширину).
Предположим, что мы начинаем в (0, 1). Промоделируем уже набранный ответ начиная с этой клетки. Окажемся где-то. Добавим в строчку-ответ кратчайший путь от этого места до выхода (найденный поиском ширину).
И так далее.
Yermack Автор
qiao.github.io/PathFinding.js/visual здесь можно посравнивать. А* будет эффективней чем BFS. Разобрался в Вашем варианте — очень даже здорово, выход гарантирован из каждой точки, осталось только посчитать, но думаю ограничения вводились как раз с отсылкой на это решение.
Комментатор ниже дельно предложил — найти минимальную строку. Еще бы хотелось маршрут, где робот не будет касаться барьеров или доказать, что такого алгоритма нет
daiver19
Как он может быть эффективнее, если вам нужно путь из каждой клетки узнать? Да и вообще время решения исходит не из линейного BFS, а от набора/эмуляции решения. Но как по мне рандомизированное решение практичнее.
Deosis
Если под барьером вы понимаете ситуацию, когда робот, получив команду, останется на месте, так как там стена, то маршрута из любой произвольной точки нет.
Достаточно представить, что робот начинает из крайних правой, левой, верхней и нижней точек. Для любой команды будет положение, в котором робот останется на месте.