

Автономный летающий беспроводной малогабаритный робот-куб «Bumble» проекта Astrobee начал проходить полетные испытания на борту МКС.
upd: добавлены фото док-станции.
2019 год — год роботов на МКС. Еще не прилетел FEDOR, а уже начались боевые тесты у роботов проекта Astrobee.

Два робота уже находятся на станции — это «Bumble» и «Honey», а в июле ожидается прибытие на МКС третьего робота — «Queen».

Их имена непросто так связаны с миниатюрностью и имеют «пчелиный» нрав.
Это специально разработанные для работы в невесомости внутри модулей МКС сервисные небольшие автономные роботы, спроектированные и созданные NASA в исследовательском центре Ames, которые должны как пчелки взять на себя часть рутинных космических задач и освободить экипаж МКС от простых, но частых действий.
Таким образом, проект Astrobee — это свободно летающая система из комплекса роботов, основной целью которой является испытание малогабаритных автоматизированных платформ в условиях невесомости с получением и анализом данных в реальных условиях и возможностью дальнейшего модернизирования и усовершенствования программного обеспечения и функций роботов для выполнения текущих и новых задач на МКС.


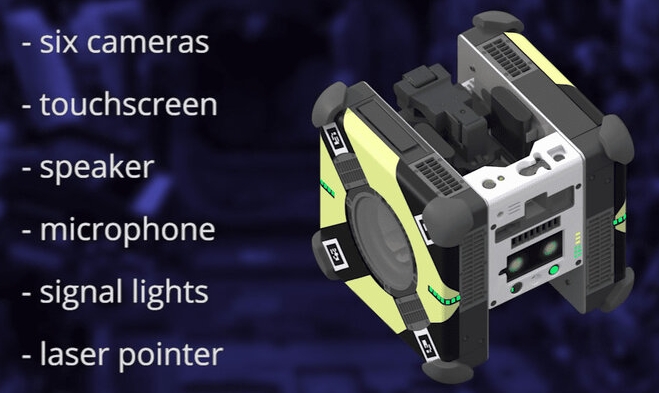
Характеристики роботов проекта Astrobee:
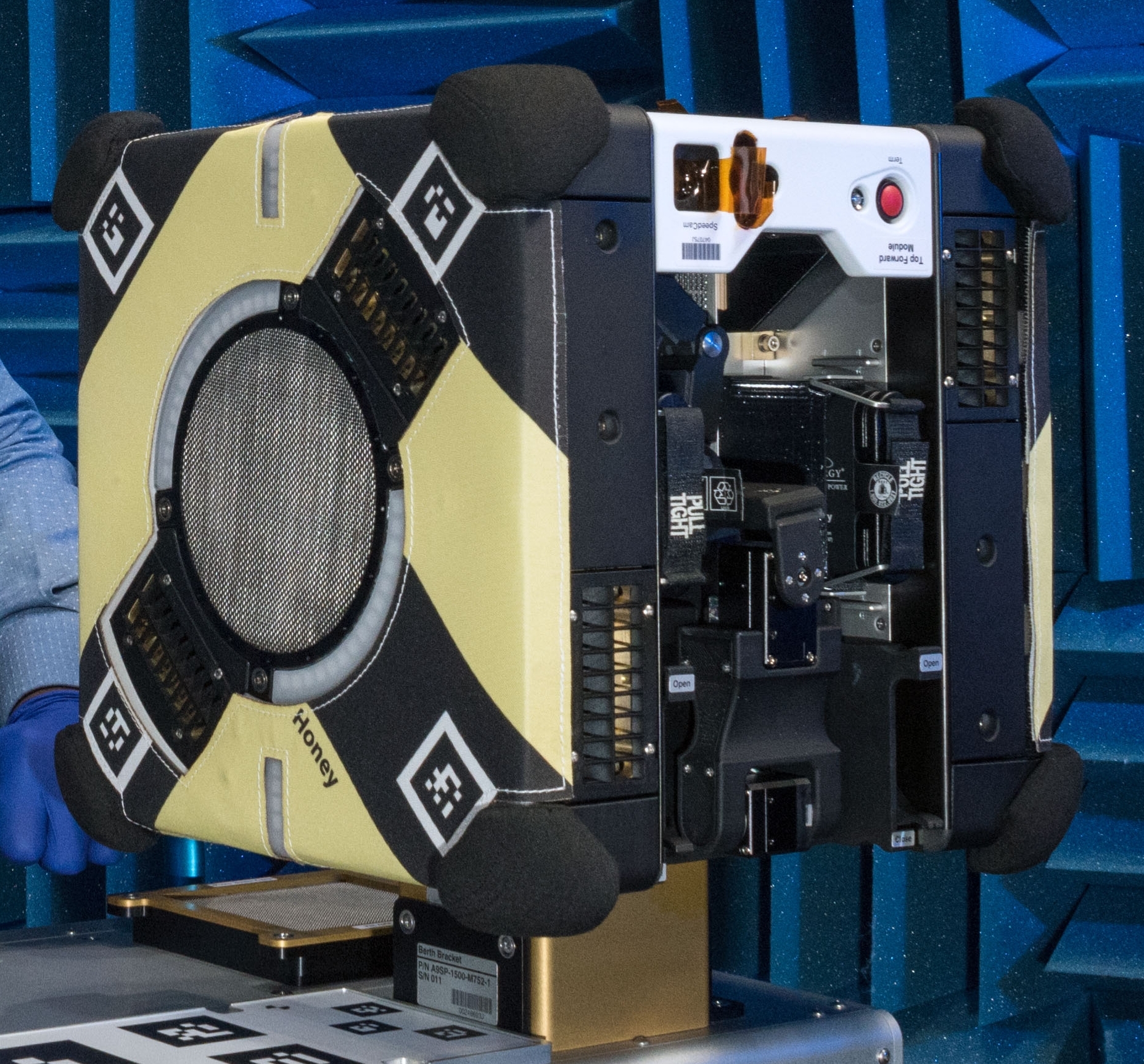
— размер одного робота — 30х30х30 сантиметров (1х1х1 фут);
— корпус робота покрыт мягким материалом для минимизации возможного ущерба при ударе о какой-либо предмет или элемент на МКС;
— часть граней робота предназначена для работы с небольшими грузами, тут даже есть система захвата и фиксации предметов со складывающимся манипулятором, чтобы робот мог удерживать и безопасно перемещать предмет из одного конца станции в другой, так же с помощью этого захвата робот может фиксировать свое положение при необходимости, зацепившись за поручни или другие элементы МКС;

— у роботов есть отдельная внешняя зарядная станция, которая служит для зарядки батарей роботов и снятия данных телеметрии;

— роботы могут передвигаться только внутри МКС в условиях невесомости лишь в том случае, если в рабочем модуле с роботом есть атмосфера, их реактивная система использует воздух станции для движения;
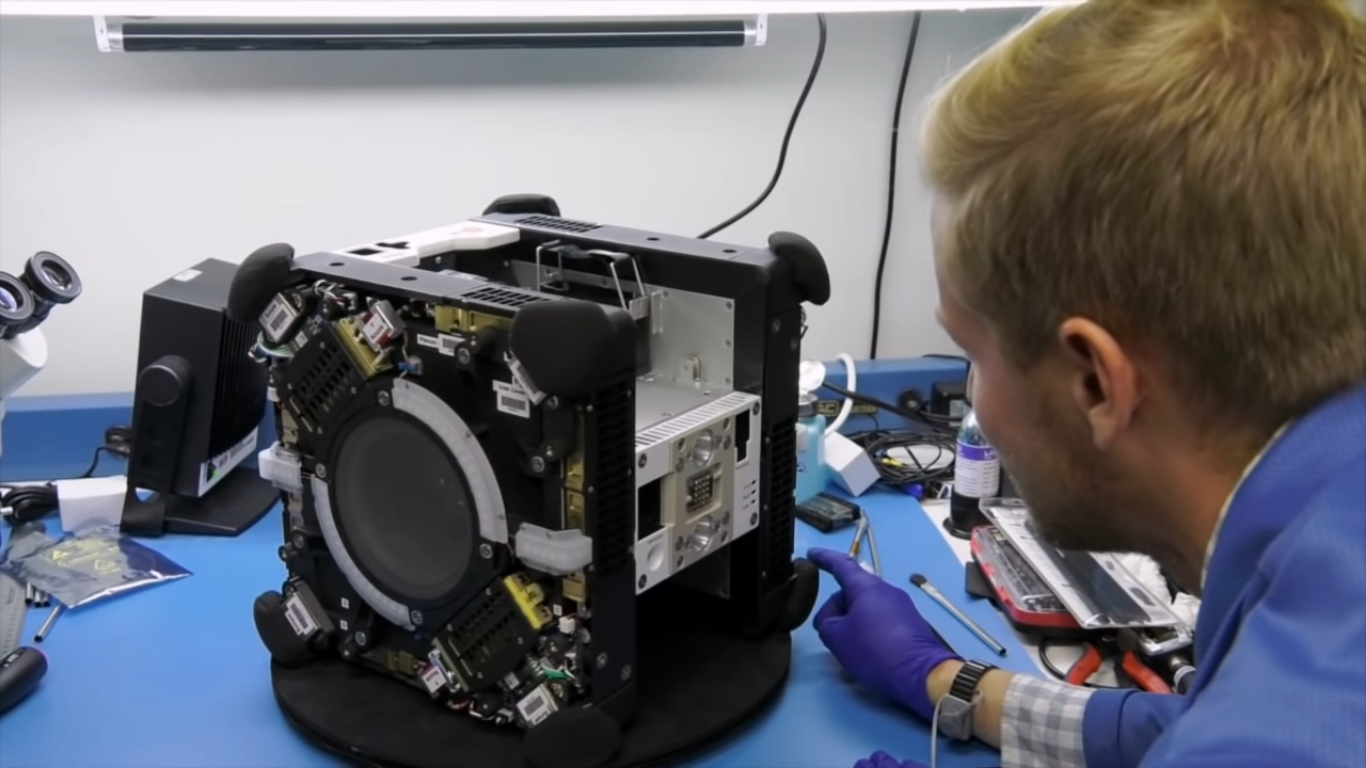
— у каждого робота своя компьютерная система управления бортовой системой вентиляторов, которая позволяет захватывать и выбрасывать воздух через 12 форсунок в направлении, противоположном намеченному вектору движения, что дает возможность робопчелке двигаться в любом направлении и свободно летать по МКС в условиях невесомости;
— вентиляторы робота находятся за специальной защитной стенкой на гранях его куба;
— компьютерная система робота работает на Linux, причем модуль, который отвечает за работу с предметами и их перемещением работает на основе Android, что позволяет быстро расширять функциональность системы при необходимости;
— ссылка на репозиторий на гитхабе с ПО проекта Astrobee.
— у каждого робота есть на борту: главная навигационная камера с полем зрения в 116°, несколько HD-камер с автофокусом, которые способны передавать информацию с МКС на Землю в режиме реального времени, причем его бортовая камера CamBoard Pico Flexx позволяет роботу распознавать предметы и препятствия с расстояния до четырех метров;
— каждый робот имеет оптический детектор для определения скорости и аварийного выполнения процедуры остановки;
— режимы работы роботов: автономный, так же ими можно управлять удаленно, безопасно брать в руки, ставить на зарядку при необходимости, отключать их.
Функции роботов проекта Astrobee:
— основная задача роботов — помощь экипажу на МКС, выполнение ряда рутинных задач, чтобы персонал мог сфокусироваться на более важных задачах (проведении экспериментов и различных исследований);
— проводить инвентаризацию, документировать эксперименты, проверять системы МКС и перемещать грузы, предметы и инструменты через узкие коридоры станции и между модулями;

— выполнять техническое обслуживание модулей МКС, когда в них нет персонала или в местах, куда экипаж не может оперативно добраться;
— вести мониторинг работы систем и датчиков МКС;
— контролировать качества воздуха, анализировать уровень концентрации углекислого газа в разных местах МКС так часто, как потребуется.
История появления роботов проекта Astrobee на МКС:
— зарядная станция была доставлена на борт МКС 17 ноября 2018 года и была установлена 15 февраля 2019 года;


Автоматический выключатель ABB используют:

— роботы «Bumble» и «Honey» были запущены с Земли на МКС 17 апреля 2019 года;

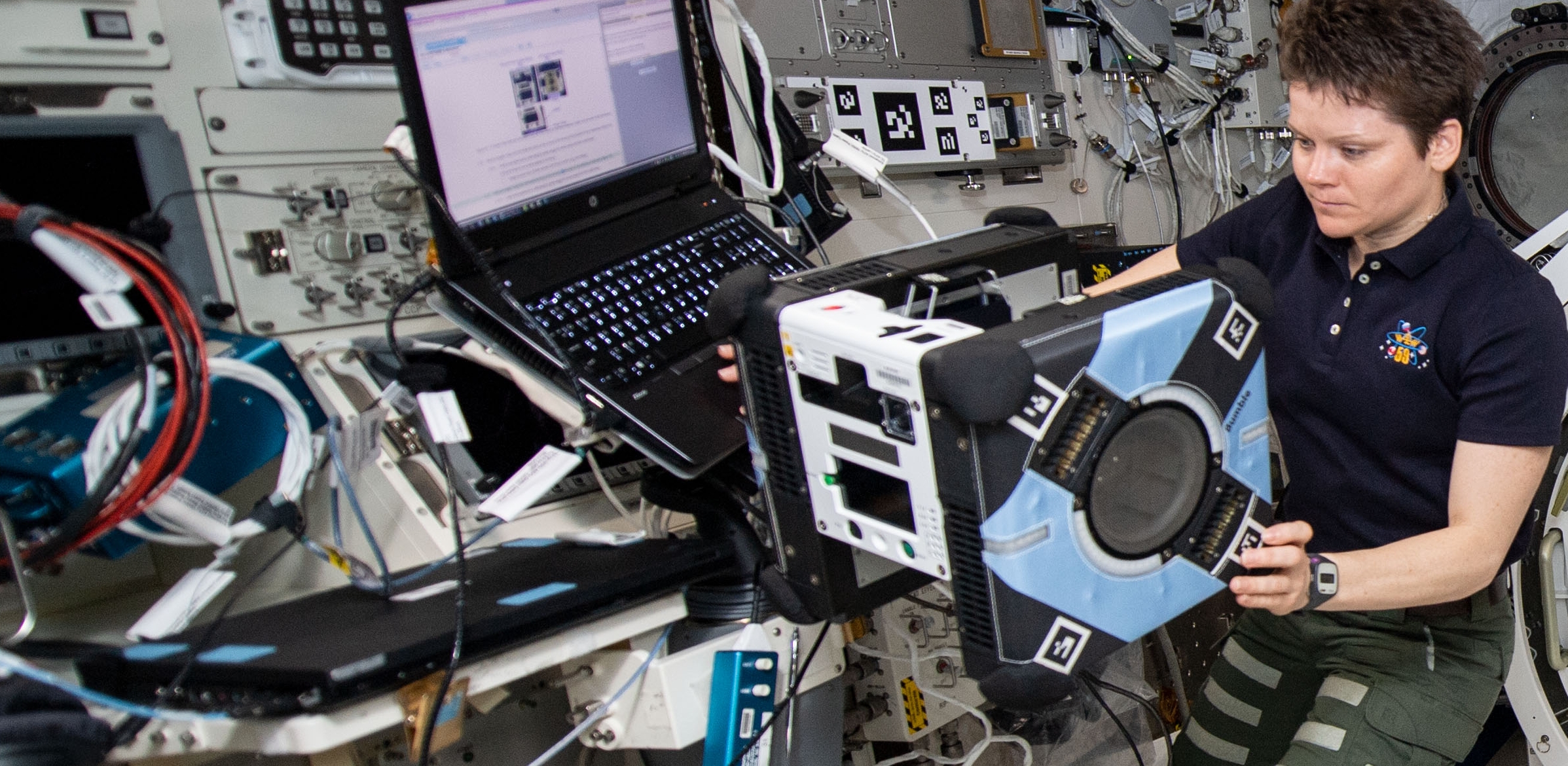
— 30 апреля 2019 года Энн МакКлейн (астронавт МКС) распаковала ящик с роботом «Bumble» и при поддержке команды разработчиков NASA проекта Astrobee, находившейся в Исследовательском центре имени Ames, провела проверку всех вспомогательных системы робота – авионики, видеокамер, пропульсивной системы, а также передачу данных и зарядку его батарей;





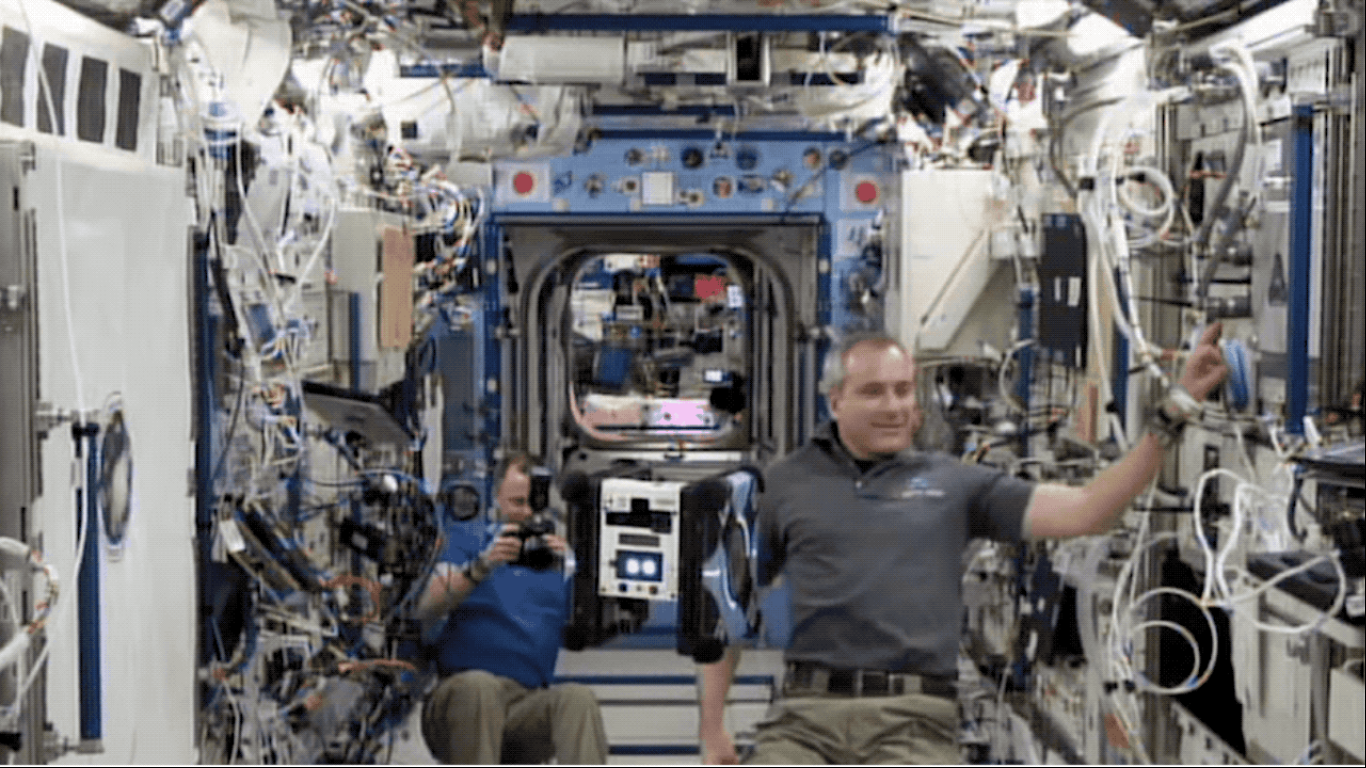
— 14 июня 2019 года начались полетные испытания с роботом «Bumble»;
— июль 2019 года — ожидается прибытие на МКС третьего робота «Queen».
Про первый полет робота «Bumble» проекта Astrobee на МКС:
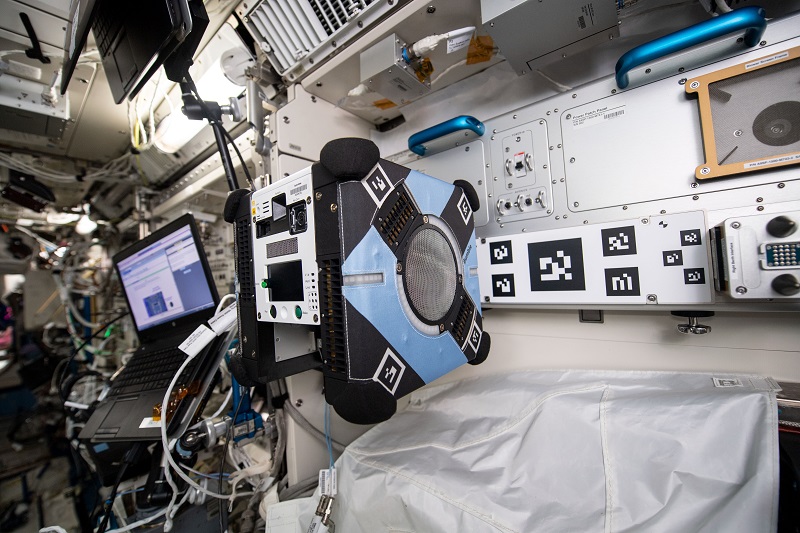
14 июня 2019 года робот «Bumble» стал первым роботом проекта Astrobee, который совершил первый тестовый полет в невесомости.
Перед первым полетом робота «Bumble» команда проекта Astrobee в исследовательском центре Ames удаленно проверила все его бортовые системы, было получено подтверждение с Земли, что робот может идентифицировать свое местоположение и готов к осуществлению навигации внутри МКС.
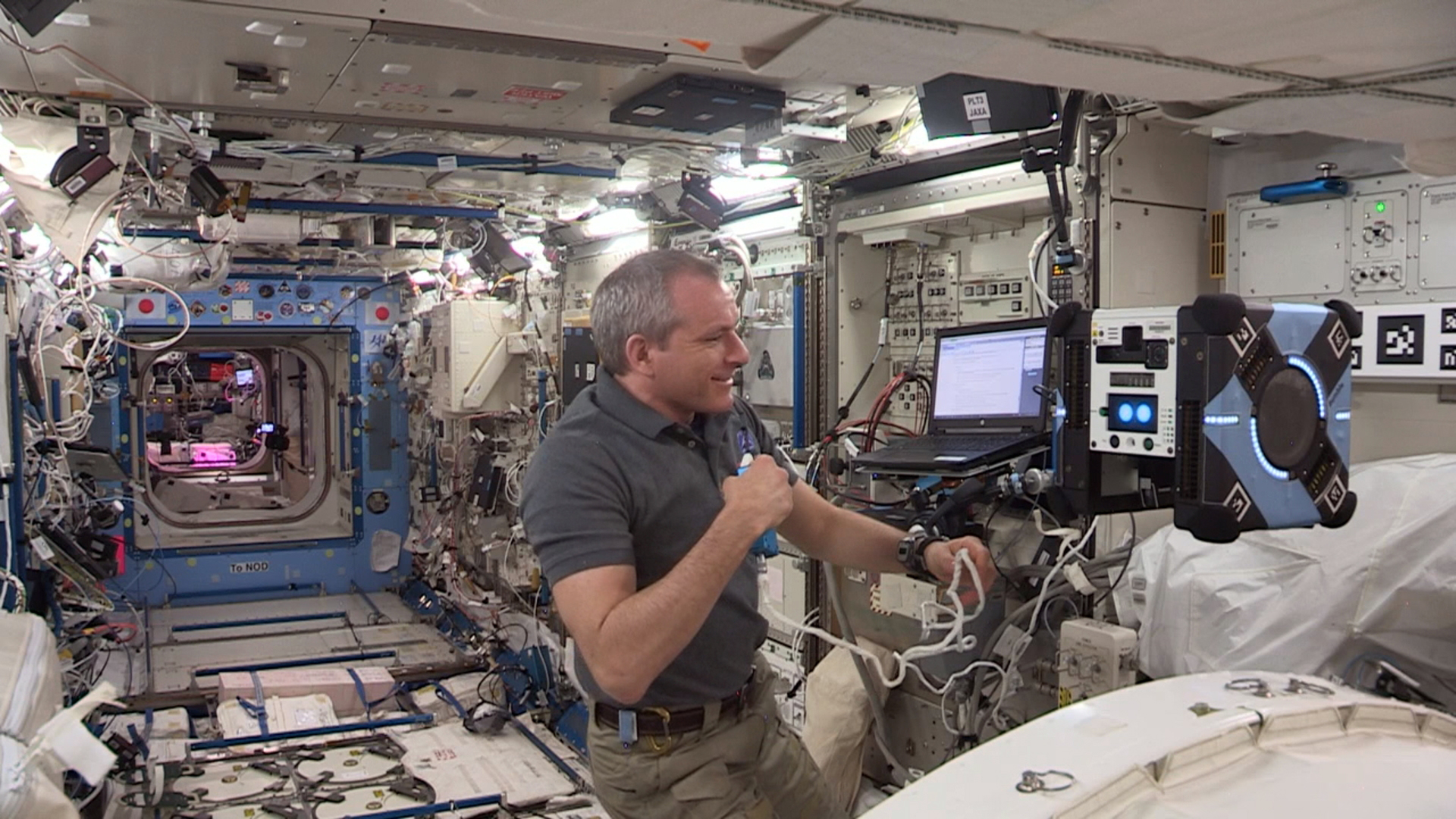
Астронавт Канадского космического агентства Дэвид Сен-Жак оказал практическую помощь при проведении предполетных испытаний, вручную перемещая робота «Bumble» внутри научной лаборатории МКС в модуле «Кибо», чтобы позволить навигационной системе робота выполнить калибровку в новом окружении по факту.
Навигационная система робота «Bumble» использует штатные камеры для наблюдения и мониторинга внешнего пространства и далее сравнивает полученные изображения с ранее загруженной в робота картой интерьера МКС.

Роботы проекта Astrobeе спроектированы двигаться в любом направлении и вращаться вокруг своих осей в пространстве на борту МКС.
Далее начались испытания работы полетных систем робота «Bumble» в автоматическом режиме и управляемом режиме (удаленно с Земли).
В ходе первого своего тестового полета робота «Bumble» проверялась работоспособность его основных бортовых компонентов и выполнялся комплекс из основных движений, таких как «полет на 11,8 дюйма (30 сантиметров) вперед» или «поворот на 45 градусов вправо», ориентация в пространстве МКС и так далее.

В NASA планируют продолжить тестировать полетные возможности робота «Bumble» с помощью серии все более сложных маневров, чтобы определить, насколько хорошо его элементы могут работать в условиях невесомости и какие нужно внести корректировки в программное обеспечение для дальнейшего его использования.
По результатам комплекса этих летных испытаний будут созданы базовые настройки для двигательной системы роботов проекта проекта Astrobeе, с помощью которых планируется помочь роботам «Bumble», «Honey» и «Queen» подготовиться к тому, чтобы взять на себя роли новых членов экипажа МКС.



Комментарии (46)

koluka
23.06.2019 13:04Очень круто!
Добавить типовой стыковочный разъем в нужных местах и хороший манипулятор — вот и частичная замена экипажу, особенно в специфичных опытах…
dolovar
23.06.2019 13:04+1Для чего ему столько светодиодов по бокам?
Jogger
23.06.2019 13:27+1Ну как зачем? Чтобы его было хорошо видно даже при плохом освещении, и сразу было понятно что это.
tretyakovpe
24.06.2019 08:49Наверное, чтобы они друг друга видели и понимали ориентацию в пространстве, когда и станет много.
mikelavr
23.06.2019 13:04+2Идея робота для невесомости, перемещающегося с помощью воздуха и банальных вентиляторов кажется простой, но я никогда не встречал описание такого робота в научной фантастике.
Zmiy666
23.06.2019 13:18+4по тому что большая часть научной фантастики — либо вакуум — где нет воздуха, соответственно робот с вентилятором там бесполезен. Либо так или иначе искусственная гравитация — там он так же бесполезен, ибо не сможет оторваться от пола, либо будет летать на неких антигравах.
Довольно мало фильмов и книг, где на кораблях описывается невесомость и роботы, работающие в ее условиях — обычно там сделан упор на людей.

Javian
23.06.2019 16:38+1У этих роботов были предшественники — habr.com/ru/post/401509 habr.com/ru/post/220261
Здесь очень подробно — habr.com/ru/post/428956

Exchan-ge
24.06.2019 00:04но я никогда не встречал описание такого робота в научной фантастике
Достаточно простая идея минимультикоптера вообще не приходила в голову фантастам — все подобные устройства у них использовали антигравитацию (см. например, «Дюну» Линча), даже полицейские дроны (City Scanner) в Half-Life, которым до натуральных коптеров осталось сделать только один маленький шаг )
Javian
24.06.2019 08:11Квадрокоптер Ботезата построен почти 100 лет назад в 1923 году.

Exchan-ge
24.06.2019 13:21Квадрокоптер Ботезата построен почти 100 лет назад в 1923 году.
«Несмотря на потраченные на программу 200 000 долларов, что было большой суммой в первой половине прошлого века, проект был прикрыт из-за некоторых проблем.
В частности, чтобы просто лететь вперед, был нужен попутный ветер. Ботезат хотел продолжить работу и исправить эту проблемой, но не успел» (с) habr.com/ru/post/362499Javian
24.06.2019 14:04Т.е. проблемы были уже у прототипа. А фантастам современные им вещи мало интересны.
Exchan-ge
24.06.2019 19:20А фантастам современные им вещи мало интересны
Внимательный подход к текстам известных фантастов выявил их хорошее знакомство с современными им научно-популярными идеями.
Если популяризаторы науки сочли аппарат Ботезата глупой выдумкой — то и у фантастов он не вызвал интереса.
(пытаюсь вспомнить название советского науч-популярного фильма о космосе (середина 70х, примерно) в котором были кадры с подобными неудачными и нестандартными летательными аппаратами. Может подскажет кто?)
solariserj
24.06.2019 23:56Солярис — Лема. Отрывок из исторических хроник, где один исследователь увидел 5 метрового ребёнка, и слизь океана наматывалась на винты.

alexac
23.06.2019 13:21+3Понятно, чем вдохновлялись дизайнеры этих роботов… images.app.goo.gl/acEdUL6817wtPx8H8

Vsevo10d
23.06.2019 18:48А мне показалось, что это вылитый Монитор из Halo
halo.fandom.com/wiki/343_Guilty_Spark
rPman
23.06.2019 14:09-1Ожидал видео навигации рядом с человеком, так и не увидел. Только какой то рендер, где один робот остановился (мгновенно, в воздухе) перед пролетающим другим.
Первое — это навигация в помещении где есть человек, мне кажется это самое сложное и интересное.
Второе — взять их манипулятор, такое ощущение что этот манипулятор проектировал школьник, абсолютно бесполезен в 99% применений. Вот нормальный манипулятор, идеален для небольших габаритов и легких предметов, любой конфигурации, дешевый, простой до гениальности.
Третье — автоматическая постановка на базу для зарядки, судя по виде именно это сейчас разрабатывается.
Мягкий корпус это вот эти мягкие вставки по углам, эхх… И главное вопрос — почему оно такое большое? Это нормально, что устройство пытаются сделать полностью автономным, если оно будет работать в условно замкнутом пространстве? Это задача такая, чтобы было устройство, которое в момент аварии будет работоспособно? Я бы разделил мозги, систему навигации и может быть даже парковочные доки — от подвижного модуля, зачем все это делать внутри, когда можно без особых проблем и лимитов по весу и габаритам, разместить на стене. Даже парковочное место может быть манипулятором, который сам схватит робота в воздухе и посадит на место, но это уже не обязательно. Робот по моему мнению должен состоять из корпуса, экрана, аккумуляторов, двигателей и манипулятора, может быть сюда датчики и гироскоп для ориентации… все!nvshap
23.06.2019 15:52+4Указанный вами "нормальный" манипулятор в условиях невесомости бесполезен в 99,9% применений. При попытке "схватить" свободно плавающий в воздухе предмет он просто оттолкнет его от себя.
rPman
23.06.2019 20:48Ну молодцы, а эта клешня что сделает, приклеит к себе предмет?
Само собой эти подушечки нужны на пальцах-клешнях.
И если честно я не увидел как они ловят своей клешней предмет в воздухе, показали бы да? Поймать предмет в воздухе это задача еще более сложная и боюсь ее они не решают.
solariserj
24.06.2019 08:52Так может там не нужно ловить что-то? А просто подержать ключ например, или ручку с бумагой пока руки заняты — чтоб они не разлетались по модулю


solariserj
23.06.2019 16:08Мне одно не понятно первых 2 запустили, и ещё не потестили Для выявления детских болячек, как запускают третьего.

Louie
23.06.2019 23:43Скорее всего, что-то полезное они в основном должны делать вместе. это же модульная система.

HerrDirektor
23.06.2019 16:49Вполне вероятно, что они отличаются по начинке, будут тестировать сразу 3 модификации.
Xambey
23.06.2019 17:21— Это неправильные пчёлы! Совсем неправильные! И они, наверное, делают неправильный мёд!

DartRaven
23.06.2019 20:51Вполне себе прообраз астромехов из Звёздных войн. Пока нет искусственной гравитации, такая форма довольно рациональна.

zenkov
24.06.2019 01:07> модуль, который отвечает за работу с предметами и их перемещением работает на основе Android, что позволяет быстро расширять функциональность системы при необходимости
Что это означает вообще? Они что там часть когда быдлокодерам доверяют которые только под Android умеют или что?
corvair
24.06.2019 09:42Android сейчас куда только не пихают, его сфера применения гораздо шире, чем кажется. Всевозможные встраиваемые системы, где он своего присутствия может никак не выдавать.


Bedal
24.06.2019 08:27для проведения работ в невесомости перемещение особой проблемой не является, а вот фиксация…
dMac
24.06.2019 10:16Зашел прочитать про летающих микророботов, вот таких:
кадр и фрагмент из фильма 'Напряги извилины'toivo61
24.06.2019 11:25У Лема все было, например в «Непобедимиом».

greensky
24.06.2019 11:33Я тоже припомнил тех «мушек», к тому же способных объединяться в конгломераты по мере необходимости. Но там это было на поверхности, в условиях гравитации.
А вот концепции подобного робота-«летающего пылесоса» (кстати, вполне может быть одной из функций — сбор случайно разлитой жидкости и т.д.) в фантастике не припоминаю, хотя она кажется очевидной.
greensky
24.06.2019 11:27Но заголовку сразу вспомнились «пчелки» из «Черного зеркала» (Hated in the Nation) — а тут целый летающий улей (по габаритам).
В условиях невесомости, пожалуй, что-то подобное («пчелки» размером с насекомое) и сейчас уже можно реализовать — потребление энергии в невесомости никакое, к тому же можно часто подзаряжаться (база рядом), однако такие мелкие устройства полезны разве что для «залезть и посмотреть, что там».
SomaTayron
24.06.2019 11:35Интересно, но большие вопросу по функционалу.
Пожалуй единственный бесспорный плюс — замеры атмосферы, их можно пускать для каких то работ в изолированные отсеки сегментов, в случае утечек того же метана. Минус в том, что ему для движения нужна атмосфера, при разгерметизации он обездвиживается. Хотя, возможно это ступенька с созданию уже автономной от среды модели, посмотрим
Cyl
25.06.2019 15:38Очень дальновидная стратегия с 1 инженером — пилотом и кучей таких пчелок, где борт выполнен под стандарт сервиса таких роботов. Они выполняют загружаемые на сервера миссии. Как только будет отработан этап точных перемещений и манпуляций с предметами, их можно ставить на поток, причем им не важен состав бортовой атмосферы, важно чтоб она была для реактивной тяги. Всякого рода ARM клешни могут дублироваться вакуумными присосками, электромагнитами и т.п. с самостоятельной сменой таких узлов.
Куда дешевле управлять такими пчелами с Земли, нежели содержать на борту бригаду пилотов со всеми их наземными тренировками и научным обучением.
Очень смелый и дерзкий проект.Valerij56
25.06.2019 15:46Куда дешевле управлять такими пчелами с Земли, нежели содержать на борту бригаду пилотов со всеми их наземными тренировками и научным обучением.
Это не так, возможности «пчл» намного меньше даже «космонавтов широкого профиля», тем более намного хуже, чем возможности профессиональных «специалистов по полезной нагрузке», сиречь профессиональных исследователей, проводящих эксперименты в рамках своей специализации.
Но вот дополнять друг друга, значительно увеличивая эффективность работы, космонавты и робопчёлы могут весьма серьёзно.Cyl
25.06.2019 16:31Понятно что такое решение не сиюминутная реализация, но в песпективе это имеет шанс на маштабирование и концепт роботизированной совместимой «Космической» бортовой платформы.

Daemonis
Ну вот, Федору будет чем заняться — пчел гонять :)
Capacitor10n
На просторах ангара на земле и мечтать о том как однажды он полетит в космос.
Вы ведь это имели ввиду?))))
Arson
Ага, по-македонски :)