
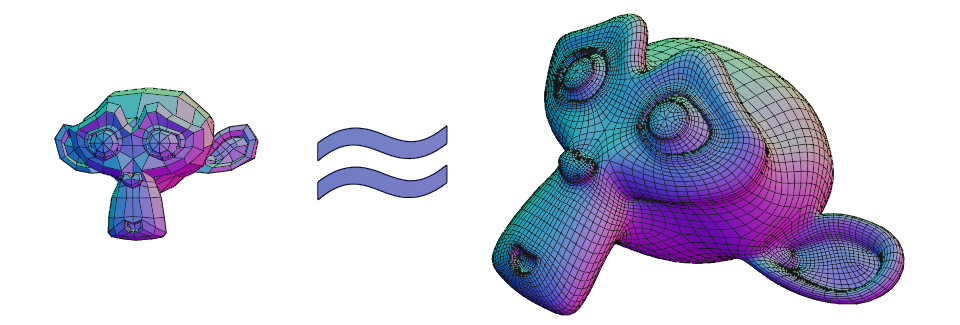
Для меня эти две модели очень похожи, однако у них нет очевидных характеристик, по которым можно было бы измерить их сходство. У этих моделей разное количество вершин, рёбер и полигонов, они разного размера, к тому же по-разному повёрнуты в пространстве, и у обеих одинаковые трансформации (Положение = [0,0,0], Вращение в радианах = [0,0,0], Масштаб = [1,1,1]). Как определить их подобие?
Если бы эти модели были одинаково ориентированы в пространстве, их можно было бы свести к общему размеру Bounding Box, переместить начало локальных координат в его центр, привести к воксельному виду и сравнить списки вокселей.

Обезьянки и их воксели.
Если бы эти модели были произвольно ориентированы вдоль осей координат, их так же можно было бы свести к общему размеру Bounding Box, переместить начало локальных координат в его центр, а затем порендерить их с шести сторон и сравнивать наборы изображений между собой.

Рендеры кривизны поверхности.
Для того, чтобы добиться инвариантности поворота, я решил обратиться к сферической системе координат. Сначала я считал расстояния до вокселей от начала координат, собирал расстояния в упорядоченные списки и сравнивал эти списки. Это дало неплохие результаты, но требовало много времени для приведения к воксельному виду достаточного разрешения и сравнения больших списков.
Краткое описание RCVS
Вместо вокселизации и рендеров мой метод использует бросание лучей (Ray Casting). Модель помещается внутрь икосаэдрального сферического многогранника, из полигонов которого бросаются лучи и записывается их длина (путь) до поверхности модели. Списки этих путей сортируются и сравниваются друг с другом. Сортировка нивелирует повороты, так как у одинаковых или близких по геометрии моделей пути лучей будут совпадать в пределах погрешности, но отличаться по порядку.


80 и 1280 лучей соответственно.
Результаты сравнения моделей обезьянки Сюзанны в разных вариантах.

Suzanne_lo
Suzanne_lo | 1
Suzanne_lo_rot_rand | 0.9878376875939173
Suzanne_lo_rot_90 | 0.9800766750109137
Suzanne_hi_rot_rand | 0.9761078629585936
Suzanne_hi | 0.9730722945028376
Suzanne_hi_rot_90 | 0.9680325422930756
Skull | 0.7697333228143514
Ceramic_Teapot_rot_rand | 0.6634783235048608
Ceramic_Teapot | 0.6496529954470333
Grenade_MK2 | 0.5275616759076022
Подробное описание RCVS
Иллюстрации шагов







Перед сравнением 3D моделей (далее объектов), каждая проходит этап подготовки (эту часть я реализовал на Python в Blender):
- Начало локальных координат компонентов объекта устанавливается в центр массы объёма.
- Объект вписывается в сферу единичного радиуса с центром в начале локальных координат компонентов объекта.
- Применяются трансформации размера.
- Вокруг объекта строится икосаэдральный сферический многогранник (далее икосфера) единичного радиуса с нормалями, направленными внутрь. Количество полигонов икосферы, на которых проводились тесты: 80, 320, 1280, 5120, 22480. Оптимальным количеством полигонов икосферы по времени и точности в тестах было определено 1280.
- Из каждого полигона икосферы по нормали отправляется луч и сохраняется его путь до столкновения с поверхностью объекта, нормаль которой направлена в сторону луча.
- Нормали объекта переворачиваются в противоположном направлении.
- Из каждого полигона икосферы ещё раз отправляются лучи и сохраняется их путь до встречи с поверхностью объекта, нормали которой направлены внутрь объекта. (Это фиксирует внутреннюю геометрию и/или заполняет слепые зоны предыдущих лучей)
- Пути лучей, отправленных с противоположных полигонов компонуются в списки, где первые два пути из пункта 5 и вторые два из пункта 7. Каждый список сортируется по наименьшему значению пути из пункта 5 так, что пути из пунктов 5 и 7 попарно соответствуют друг другу.
- Список списков всех путей сортируется по первому значению. Этот список имеет 4 столбца и количество строк, равное половине количества полигонов икосферы.
- Список путей лучей записывается в файл.
Список путей лучей выглядит примерно так:
0.00271218840585662 0.2112752957162676 0.00271218840585662 0.2112752957162676
0.004740002405006037 0.210980921765861 0.004740002405006037 0.2109809188911709
0.00660892842734402 0.2066613370130234 0.00660892842734402 0.2066613370130234
…
0.2692299271137439 0.2725085782639611 0.2692299271137439 0.2725085782639611
0.2705489991382905 0.2707842753523402 0.270548999138295 0.2707843056356914
0.2709498404192674 0.271036677664217 0.2709498404192674 0.271036642944409Когда все объекты получили готовые списки путей лучей, их можно сравнивать (эту часть я написал на Rust):
- Задаётся пороговое значение допустимой ошибки. В тестах наилучшим было определено значение 0.01, ошибка в пределах 1%.
- Создаётся счётчик соответствия.
- Для каждой строки в первом списке ищется строка из второго списка, у которой сумма отклонений не превосходит ошибки, помноженной на количество значений. Если такая строка находится, она не участвует в дальнейшем поиске. Вычисляется попарная абсолютная разница значений из двух списков и вычитается из единицы, среднее арифметическое этих значений прибавляется к счётчику.
- Когда пройдены все строки первого списка, значение счётчика делится на количество строк. Полученное значение является результатом сравнения.
- Если объекты идентичны по форме (независимо от их размера и поворота), результат близок к единице.
Бананы, Витрувианский человек и ограничения RCVS
Алгоритм отлично работает для поиска близких по геометрии объектов, например высоко- и низко-полигональных вариантов одной и той же модели, и иногда неплохо справляется с похожими по смыслу объектами, например с чайниками или гитарами разных форм. Однако, поскольку количество моделей, которым будет соответствовать один и тот же список путей лучей примерно можно оценить в , есть существенная вероятность, что визуально непохожие по геометрии объекты будут иметь счёт совпадения в диапазоне 0.5 — 0.9. В ходе тестов так вышло с бананами, которые на 0.7 совпадают с самолётами и людьми в разных позах, которые в свою очередь на “внушительные” 0.85 совпадают с тиграми и собаками.
Для более точного поиска стоит учитывать размер и/или поворот объектов.
Исходники.
Код на Python для создания словаря противоположных полигонов икосферы в Blender
import bpy
import os
name = bpy.context.active_object.data.name
polys = bpy.data.meshes[name].polygons
print("-----")
length = len(polys)
x = 0
p = 0
dict = []
for i in range(0, length):
print(i, "/", length)
for l in range(i, length):
norm1 = polys[i].normal
norm2 = polys[l].normal
if norm1 == -norm2:
dict.append(str(i)+", "+str(l))
p += 1
print("Polys", p)
basedir = os.path.dirname(bpy.data.filepath) + "/ico_dicts/"
if not os.path.exists(basedir):
os.makedirs(basedir)
file = open(basedir + "/" + str(length) + ".csv","w")
for poly in dict:
file.write(poly + "\n")
file.close()
print("----ok----")
Код на Python для подготовки объектов и создания списка путей лучей в Blender.
import bpy
import os
from math import sqrt
import csv
#Icosphere properties
#icosubd:
#5 -> 5120 X 2 rays
#4 -> 1280 X 2 rays
#3 -> 320 X 2 rays
#2 -> 80 X 2 rays
icosubd = 4
size = 1280 #name of directory
radius = 1
def icoRC(icosubd, rad, raydist, normals, target):
icorad = rad
bpy.ops.mesh.primitive_ico_sphere_add(radius=icorad, subdivisions=icosubd, enter_editmode=True, location=(0, 0, 0))
bpy.ops.mesh.normals_make_consistent(inside=normals)
bpy.ops.object.editmode_toggle()
ico = bpy.context.active_object
mesh = bpy.data.meshes[ico.data.name]
rays = []
size = len(mesh.polygons)
for poly in mesh.polygons:
normal = poly.normal
start = poly.center
ray = target.ray_cast(start, normal, distance=raydist)
if ray[0] == True:
length = sqrt((start[0]-ray[1][0]) ** 2 + (start[1]-ray[1][1]) ** 2 + (start[2]-ray[1][2]) ** 2)
rays.append(length / (radius *2))
else:
rays.append(-1)
result = []
#Combine opposite rays using CSV dicts
dictdir = os.path.dirname(bpy.data.filepath) + "/ico_dicts/"
with open(dictdir+str(size)+'.csv', newline='') as csvfile:
ico_dict_file = csv.reader(csvfile, delimiter=',')
for row in ico_dict_file:
result.append([rays[int(row[0])], rays[int(row[1])]])
bpy.ops.object.select_all(action='DESELECT')
bpy.data.objects[ico.name].select_set(True)
bpy.ops.object.delete()
return result
#Batch preparation of objects by scale and origin
def batch_prepare():
for obj in bpy.context.selected_objects:
bpy.ops.object.origin_set(type='ORIGIN_CENTER_OF_VOLUME', center='MEDIAN')
max_dist = 0
bb = bpy.data.objects[obj.name].bound_box
for vert in obj.data.vertices:
dist = vert.co[0]**2 + vert.co[1]**2 + vert.co[2]**2
if dist > max_dist:
max_dist = dist
obj.scale *= (1 / sqrt(max_dist))
def write_rays(dir):
for obj in bpy.context.selected_objects:
bpy.ops.object.transform_apply(location=False, rotation=False, scale=True)
#Cast rays on object with normals turned inside
bpy.context.view_layer.objects.active = obj
bpy.ops.object.editmode_toggle()
bpy.ops.mesh.normals_make_consistent(inside=True)
bpy.ops.object.editmode_toggle()
result1 = icoRC(icosubd, radius, radius*2, True, obj)
#Cast rays on object with normals turned outside
bpy.context.view_layer.objects.active = obj
bpy.ops.object.editmode_toggle()
bpy.ops.mesh.normals_make_consistent(inside=False)
bpy.ops.object.editmode_toggle()
result2 = icoRC(icosubd, radius, radius*2, True, obj)
final = []
#Sort sub-lists and append them to main list
for i in range(0, len(result1)):
if result2[i][0] < result2[i][1]:
final.append([result2[i][0], result2[i][1], result1[i][0], result1[i][1]])
else:
final.append([result2[i][1], result2[i][0], result1[i][1], result1[i][0]])
basedir = os.path.dirname(bpy.data.filepath) + "/rays/" + str(size) + "/"
if not os.path.exists(basedir):
os.makedirs(basedir)
file = open(basedir + "/" + obj.name,"w")
final.sort(key=lambda x: x[0]) #Sort list by first values in sub-lists
#Writing to file
for ray in final:
ray_str = ""
for dist in ray:
ray_str += str(dist) + " "
file.write(ray_str + "\n")
file.close()
batch_prepare()
write_rays(size)
Код на Rust для сравнения списков.
use rayon::prelude::*;
use std::collections::HashSet;
use std::fs;
use std::io::{BufRead, BufReader, Error, Read};
//Creates Vector from file
fn read<R: Read>(io: R) -> Result<Vec<Vec<f64>>, Error> {
let br = BufReader::new(io);
br.lines()
.map(|line| {
line.and_then(|v| {
Ok(v.split_whitespace()
.map(|x| match x.trim().parse::<f64>() {
Ok(value) => value,
Err(_) => -1.0,
})
.collect::<Vec<f64>>())
})
})
.collect()
}
//Compares two objects
fn compare(one: &Vec<Vec<f64>>, two: &Vec<Vec<f64>>, error: f64) -> f64 {
let length = one.len();
let mut count: f64 = 0.0;
let mut seen: HashSet<usize> = HashSet::new();
for orig in one {
let size = orig.len();
for i in 0..length {
if seen.contains(&i) {
continue;
} else {
let targ = &two[i];
if (0..size).map(|x| (orig[x] - targ[x]).abs()).sum::<f64>() > error * size as f64 {
continue;
}
let err_sum = (0..size)
.map(|x| 1.0 - (orig[x] - targ[x]).abs())
.sum::<f64>();
count += err_sum / size as f64;
seen.insert(i);
break;
}
}
}
count / length as f64
}
//Compares one object with others on different threads
fn one_with_others(
obj: &(String, Vec<Vec<f64>>),
dict: &Vec<(String, Vec<Vec<f64>>)>,
) -> Vec<(usize, f64)> {
let length = dict.len();
(0..length)
.into_par_iter()
.map(|x| {
println!("Puny human is instructed to wait.. {:}/{:}", x + 1, length);
(x, compare(&obj.1, &dict[x].1, 0.01))
})
.collect()
}
fn main() {
let ray = 1280; //name of directory
let obj_cur = "Suzanne_lo"; //name of object
let mut objects = Vec::<(String, Vec<Vec<f64>>)>::new();
let path_rays = format!("./rays/{:}/", ray);
let paths = fs::read_dir(path_rays).unwrap();
let obj_path = format!("./rays/{:}/{:}", ray, obj_cur);
let obj = (
obj_cur.to_string(),
read(fs::File::open(obj_path).unwrap()).unwrap(),
);
for path in paths {
let dir = &path.unwrap().path();
let name = dir.to_str().unwrap().split("/").last().unwrap();
objects.push((
name.to_string(),
read(fs::File::open(dir).unwrap()).unwrap(),
));
}
let mut result = one_with_others(&obj, &objects);
result.sort_by(|a, b| b.1.partial_cmp(&a.1).unwrap());
print!("{}\n", "_".repeat(150));
println!("{:}", obj.0);
for line in result {
println!(
"{:>36} |{:<100}| {:<14}",
objects[line.0].0,
"?".repeat((line.1 * 100.0).round() as usize),
line.1
);
}
}
Ссылка на исходники и проект Blender с тестовой сценой.
Ссылка на GitHub.





DanNsk
Эмм, это вроде как вариация ICP? en.wikipedia.org/wiki/Point_set_registration
p4ymak Автор
в некотором роде. спасибо за ссылку!
Winer_Hopf
Нет, все же вряд ли это можно назвать вариацией ICP. Здесь оперирование не с облаками точек, а с векторами, для которых не фиксирована перестановка. Именно по этой причине не получается применять стандартные алгоритмы для регистрации облаков точек. Это вообще одна из основных проблем geometrical deep learning — различные перестановки над частью признакового описания данных не изменяет самих данных (так же изветно как неевклидов тип данных — medium.com/@flawnsontong1/what-is-geometric-deep-learning-b2adb662d91d).
Скорее этот алгоритм это развитие идей построение дескрипторов 3D моделей на основе ray casting. (очень хороший обзор разных типов алгоритмов и их особенностей изложен в данной диссертации www.uni-konstanz.de/mmsp/pubsys/publishedFiles/Vranic04.pdf).