
Источник: Stanford News
Исследователи Стэнфордского университета разработали новый тип мягкого робота, который сочетает в себе традиционную и мягкую робототехнику. Он может менять форму и двигаться, не привязываясь к источнику энергии или воздушному компрессору.
«Существенным ограничением большинства мягких роботов является то, что они должны быть прикреплены к громоздкому воздушному компрессору или подключены к источнику энергии, что препятствует их движению. Поэтому мы задались вопросом: что если мы будем постоянно держать в роботе одинаковое количество воздуха?», — отмечает Натан Усевич, аспирант в Стэнфорде.
В ходе своих разработок учёные создали мягкого робота, который может изменять свою форму, что позволяет ему захватывать объекты и катиться в заданном направлении. Их изобретение описано в статье, опубликованной в журнале Science Robotics.
«Я описываю этого робота как сочетание Baymax из анимационного фильма Big Hero 6 («Город героев») с трансформером. Другими словами, с одной стороны это мягкий, безопасный робот, с другой — это механизм, который способен кардинально менять свою форму», — объясняет Усевич.
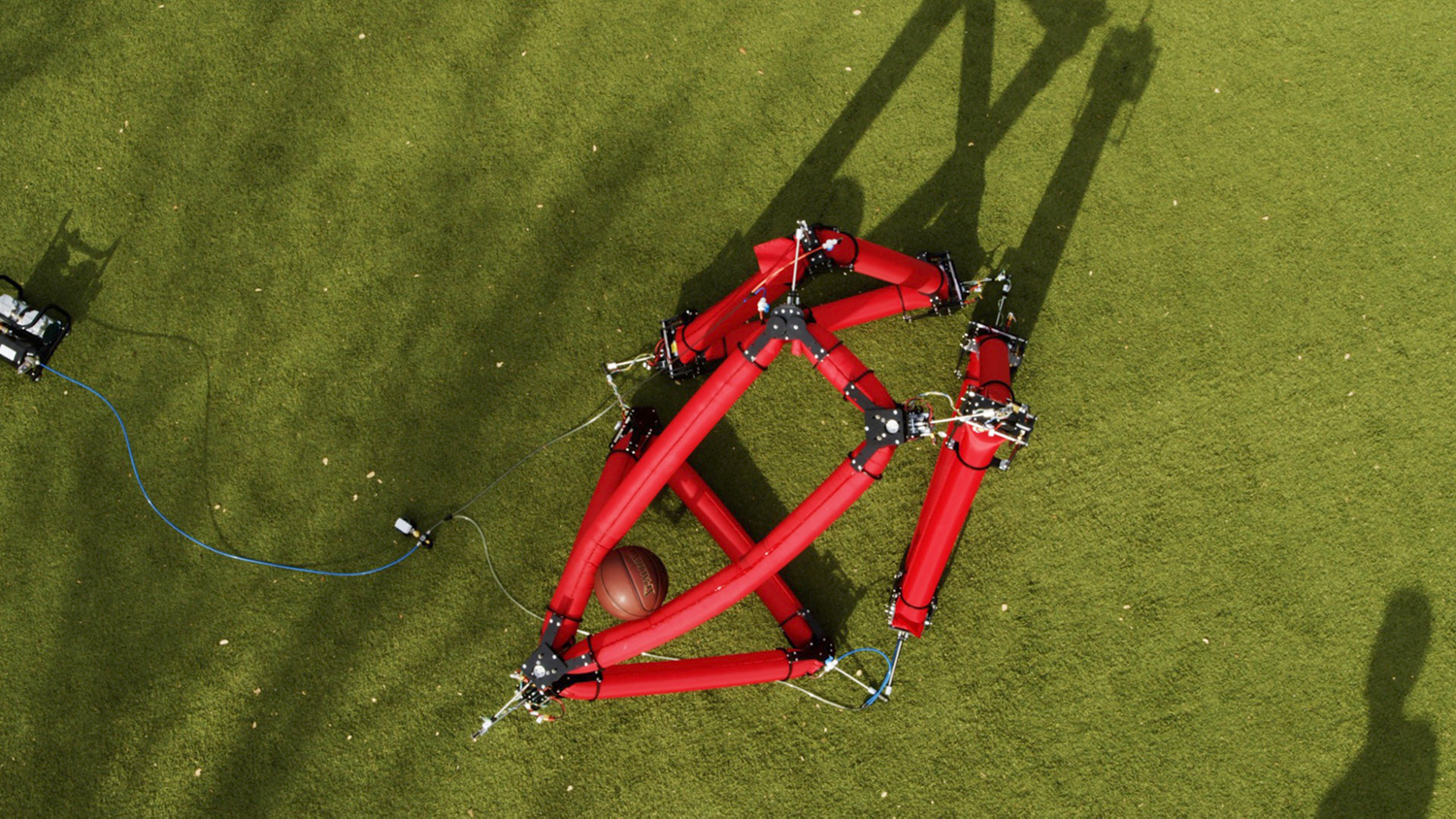
Самая простая версия этого мягкого робота выглядит как наполненная воздухом труба, которая проходит через три маленьких механизма-двигателя, зажимающих её так, чтобы получался треугольник. Один механизм удерживает два конца трубки вместе; два других движутся вдоль трубы, изменяя общую форму робота, перемещая его углы. Чтобы сделать более сложную версию робота, исследователи соединяют несколько треугольников вместе. Координируя работу механизмов, они могут заставить робота выполнять различные действия, например, захватывать мяч, или изменять центр массы робота, чтобы он вращался.
«На самом деле этот робот представляет собой совокупность отдельных конструкций, которые работают вместе для перемещения робота и изменения его формы. Это помогает сделать мягкого робота адаптируемой и надежной системой», — поясняет Мак Швагер, доцент кафедры аэронавтики и космонавтики в Стэнфорде и соавтор статьи.
Ключевая особенность разработки учёных заключается в том, что отныне для того, чтобы заставить двигаться мягкого робота, им не приходится накачивать воздух. Для этого можно использовать воздух, который уже есть внутри, и просто перемещать его, используя двигатели. Этот метод более эффективен и позволяет роботу двигаться намного быстрее, указывают учёные.
Область мягкой робототехники относительно нова, указывают в Стэнфорде, а это значит, что все возможности таких роботов ещё предстоит раскрыть. Их мягкость обеспечивает безопасное использование, кроме того, они прочны, что делает их полезными при работе в жилых домах, где традиционные роботы могут причинить травмы. Мягкие роботы также могут служить инструментами для устранения последствий стихийных бедствий.
Другие возможности использования мягкого робота можно найти в космосе.
«Этот робот может быть очень полезен для исследования космического пространства, в частности, потому, что его можно перевозить в небольшом пакете, а затем надуть, и он будет работать без привязи к компрессору. На другой планете может быть полезна его способность изменять форму, которая позволит ему преодолевать пересечённую местность и сложные среды, протискиваться в тесных пространствах и перемещаться через препятствия», — указывают в Стэнфорде.
На данный момент исследователи экспериментируют с различными формами для своего гибкого робота и планируют запустить его на воду, чтобы посмотреть, умеет ли он плавать. Они также изучают другие типы мягких роботов, каждый из которых имеет свои особенности и преимущества.

Garbus
Они чудом подняли емкость накопителей энергии робота на пару порядков? Иначе «обычный» манипулятор в электродвигателями видится более экономичным. Ведь проталкивать гибкую трубу наверняка более затратно дополнительными потерями на трение, не считая трудностей с температурным режимом и общим ресурсом. Хотя конечно, по массе надувные силовые элементы (изменяемой геометрии) выглядят интересным вариантом.
silent_jeronimo
Не обязательно. Материал трубы выглядит достаточно гладким для скольжения. Захват, при перемещении, можно ослаблять до приемлемого. В целом, моторов можно использовать меньше.
Интересно, не сдует ли его ветром.
Garbus
Мне просто не слишком нравится идея проталкивать трубку с такими изгибами. Толстая — тяжело, тонкая — уязвимее к повреждениям и утечке воздуха. Идей у людей много, вот только не всегда имеющиеся материалы позволяют их применить на практике. Может они нашли хорошее сочетание? Увидим.
silent_jeronimo
так она же тканевая.
Garbus
Ткань как основа возможна, но ведь без сплошного слоя «чего-нибудь» не получится герметичности.
И еще момент пришедший в голову — даже небольшое количество пыли превратится в отличный абразив, не улучшающий работу. Впрочем и конструкция пока демонстрационная.