
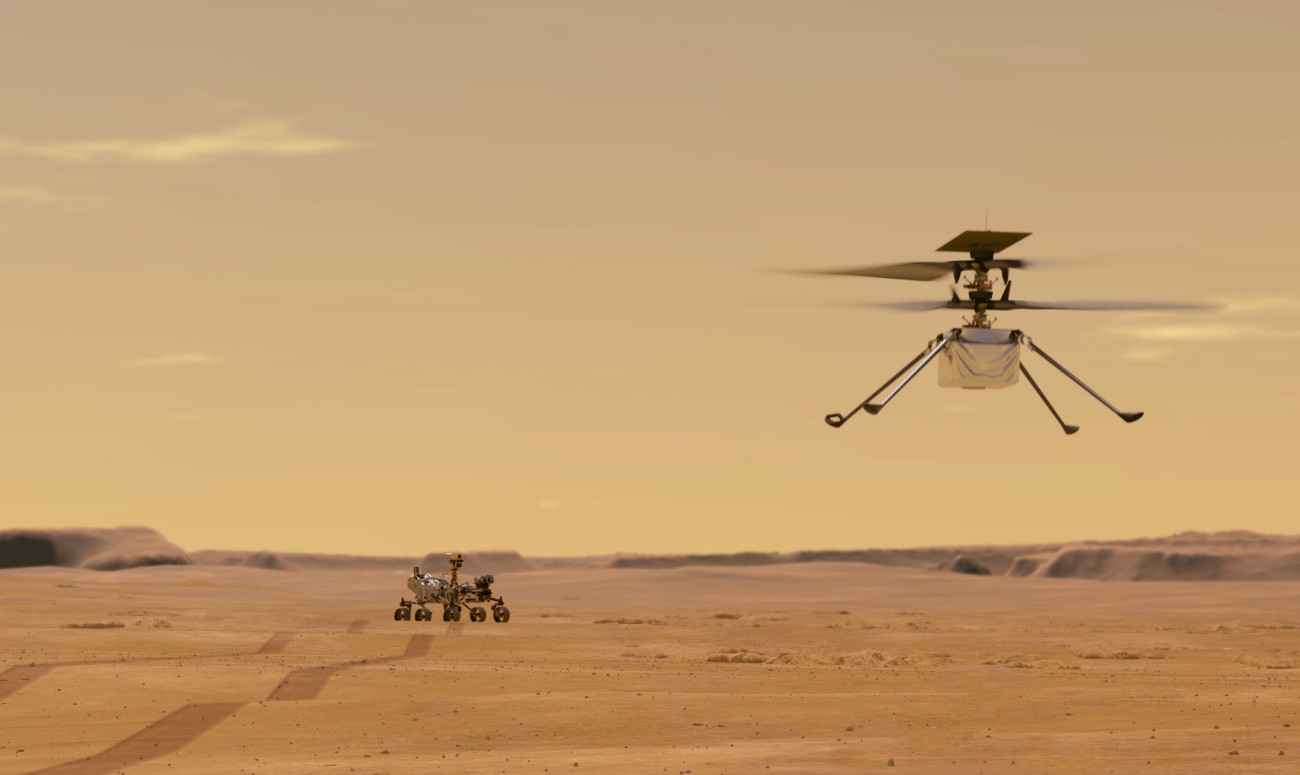
20 февраля 2021 года сотрудники лаборатории реактивного движения NASA (Jet Propulsion Laboratory, JPL) получили первый сигнал от систем небольшого беспилотного аппарата "Индженьюити" (англ. Ingenuity, «Изобретательность»), прибывшего на Марс в составе марсохода «Персеверанс». Дрон и его базовая станция хорошо пережили перелет с Земли на Марс, а также выдержали посадку. Их системы включились и работают нормально.
Специалисты НАСА уточнили, что приступили к частичной зарядке шести литий-ионных батарей дрона, чтобы держать их на уровне заряда 30-35%. Бортовые системы марсохода и в ЦУП на Земле будут следить за температурой элементов дрона. Необходимо поддерживать ее в рабочем диапазоне, чтобы электроника и батареи дрона не перегревались и не остывали.
БПЛА будет оставаться прикрепленным к марсоходу в течение 30-60 дней, пока не пройдут все необходимые тесты, а также не будет найдено место для его выгрузки. Сейчас дрон находится в защищенном отсеке и подключен к источнику электропитания марсохода. После того, как он будет готов и установлен на поверхность Марса, дрон расправит свои винты и будет заряжаться от собственной солнечной панели, установленной сверху его винтов.
 «Персеверанс» должен будет найти плоский участок на поверхности, что высадить мини-вертолет «Индженьюити», прикрепленный в сложенном состоянии к нижней части марсохода.
«Персеверанс» должен будет найти плоский участок на поверхности, что высадить мини-вертолет «Индженьюити», прикрепленный в сложенном состоянии к нижней части марсохода.Планируется, что дрон «Индженьюити» станет первым БПЛА на другой планете, который совершит управляемый полет. Дрон имеет массу 1,8 кг, четыре опоры с посадочными чашками, на его борту установлены две цветные камеры (0,5 МП для ориентации и 13 МП для аэрофотосъемки в 4K), система навигации, включая лазерный высотомер от SparkFun Electronics и гиростабилизатор (IMU), система передачи данных (канал связи до 250 Кбит/с на расстоянии до 800 метров от марсохода), а также аккумуляторные батареи и солнечная панель. На дроне установлены два соосных несущих контрвращающихся карбоновых винта диаметром 1,2 метра каждый, их обороты будут достигать 2400 в минуту. Заряда батарей должно хватать на один полутораминутный полет, на который в среднем затратится 350 Вт мощности.
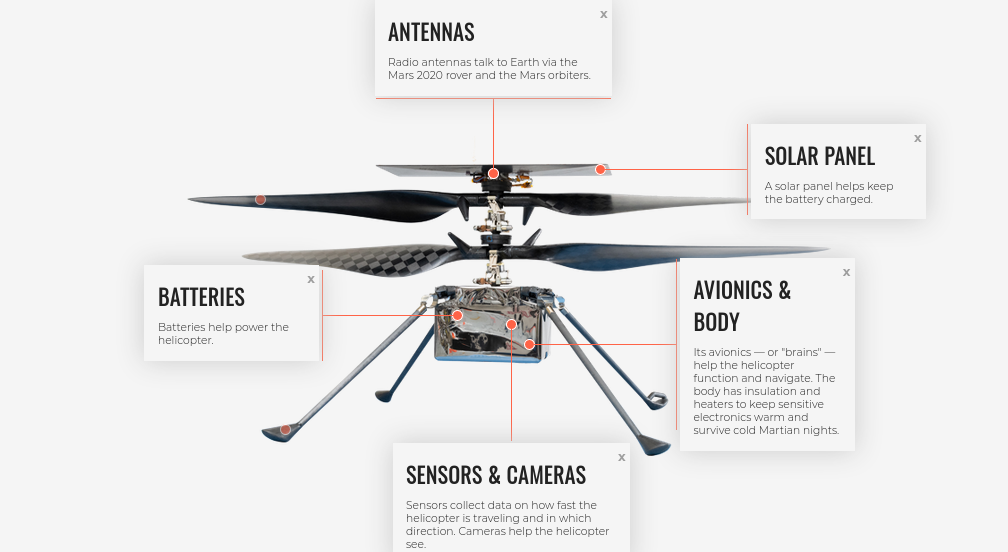
Элементы марсианского вертолета.
Аппаратные системы «Индженьюити» основаны на плате SoC Snapdragon 801. В нем установлен Linux и открытое ПО. Вертолет будет летать самостоятельно, без участия оператора. Он должен взлетать, сделать несколько маневров и приземляться, ориентируясь на местности автономно, задействуя лишь минимум команд с Земли, отправленных заранее.
Цель использования первого БПЛА на Марсе — разведка, исследование труднодоступных мест и сбор данных для создания более совершенных дронов, способных работать в разреженной атмосфере планеты в будущем.
Заявленное НАСА время автономной работы дрона на поверхности Марса — 30 солов (31 земные сутки). За это время он должен совершить первый тестовый полет, состоящий из тридцатисекундного подъема на три метра, а также четыре-пять запланированных полетов на дальние расстояния, в которых он будет подниматься на высоту до 5 метров и отлетать от марсохода на расстояние до 300 метров.
Специалисты НАСА не ожидают, что дрон сможет выполнить все задачи. Они пояснили, что если «Индженьюити» удастся взлететь и зависнуть во время своего первого полёта, то уже будет достигнуто более 90 % целей проекта, особенно, если он сможет успешно приземлиться и останется работоспособным.
Видео от НАСА с примером применения беспилотного вертолета «Индженьюити».
Аппараты новой марсианской исследовательской миссии успешно достигли поверхности планеты в ночь на 19 февраля по московскому времени примерно в 2 км от кратера Джезеро.
20 февраля НАСА опубликовало первые снимки «Персеверанса» с Марса.
21 февраля НАСА выложило в открытых доступ более 60 новых фотографий (если считать миниатюры, то 145 новых кадров) с ч\б бортовых обзорных камер Hazcam марсохода «Персеверанс».








DrMefistO
Звучит оптимистично:)
Smile_makker
для начала и это не плохо, не все же сразу))
RigelNM
Если для финансирования достаточно таких обещаний — зачем же обещать больше. Будет летать дольше чем заявлено (как все аппараты на марсе) — отлично.
DGN
Li-ion батареи не дают повода к оптимизму. Но даже один управляемый полет, это будет круто и фоточки красивые (надеюсь).
Paskin
Почему? Это же не гоночный коптер, а на дальность люди вполне летают на Li-Ion
DGN
Потому что li-ion не заряжается при t отрицательной. И не дает ток/емкость. Поэтому все любители полетать зимой, батареи свои греют перед полетом. В полете она прогревается мощными разрядными токами, а дальше как?
sidorovmax
две третьих энергии аккумуляторов тратится на подогрев.
KvanTTT
Интересно, почему нельзя было установить какие-нибудь условно бесконечные ядерные батарейки? Нет и не будет же ничего живого вокруг (за исключением гипотетической марсианской жизни).
DGN
Я вот не нашел сколько же дает тепла ядерная батарейка в форм-факторе микросхемы (которая 31нВт/см2), и сколько она весит. Пишут, что 1 грамм 238 плутония генерирует пол ватта тепловой энергии, и вроде как, выглядит это неплохо. Плохо, что он все это делает всегда, его нельзя регулировать. То есть надо добавлять систему охлаждения, так как перегревать батарейки тоже нельзя. Ну и изотоп нужен фонящий альфой, так как гаммой мы попортим управляющий компьютер.
redpax
Ядерными элементами можно кстати греть литийионные батареи, а невозможность регулирования теплоотдачи можно решить термодатчиками на самих батареях и простеньким приводом который в случае перегрева будет дистанцировать ядерную ячейку от литийионного аккумулятора.
Dr_Faksov
Причин несколько:
Основная — ненулевая вероятность аварии на взлёте. Как профит имеем потенциальное радиоактивное заражение окружающей среды.
Вспомогательная — хотя «Нет и не будет же ничего живого вокруг», но есть свои собственные микросхемы, которые будут облучатся с момента монтажа источника. То есть весь полёт + время работы на Марсе. Что совсем не прибавит им здоровья. Значит нужна защита, а это бесполезная масса, которую надо тянуть на Марс.
Гипотетическая — а вдруг «живое» есть?
Retifff
Вопрос, какие у них токи отдачи. Насколько я понял, довольно низкие, а этого недостаточно для взлета коптера.
Lexxnech
Главная проблема в том, что ядерной батарейкой просто не получится заменить химическую. Ядерная батарейка это не аккумулятор, она непрерывно выдает небольшое количество энергии, а вертолет будет делать короткие перелеты с большим энергопотреблением. Во время полета веротлет будет потреблять 350 ватт, что в три с лишним раза больше, чем вырабатывает РИТЭГ самого ровера, который весит как 25 таких вертолетов.
Поэтому работать он будет по схеме «много часов заряжаем батарею — полторы минуты летаем».
redpax
Ядерная батарея + конденсаторили даже + литийионна батарея? Излишки энергии после зарядки конденсатора сбрасывать в виде тепла в атмосферу через радиаторы?
Lexxnech
И зачем? Нет такой задачи — добавить в аппарат ядерную батарейку. Одно дело, если бы можно полностью от нее одной коптер запитать, но так не получится. А теперь у нас и аккумулятор и ядерная батарейка и радиаторы, и все это на аппарате в 1,8кг.
JerleShannara
И не только, SparkFun и Snapdragon 801 тоже не вселяют оптимизма.
Krypt
насколько я помню, весь аппарат собрат из потребительских деталей. Это аппарат не для выполнения экспериментов, а сам по себе — эксперимент.