

Цель проекта
Сделать компактный, встраиваемый и недорогой частотный преобразователь с питанием от однофазной сети 230-240 В 50Гц, способный управлять асинхронными 220 В 3-х фазными двигателями 1..2 кВт, для плавного разгона и остановки и поддержания частоты вращения от 0 до 1500 об. в мин. Связь с устройством через полевую шину CAN или RS485.
Решиться делать свой ЧП непросто, потому что есть масса готовых на любой вкус. Своя мелкосерийная разработка по цене будет неконкурентной. Однако если в ЧП перенести часть функциональности конечного агрегата помимо управления мотором, то можно удешевить аппаратную обвязку вокруг ЧП и экономически оправдать его создание.
Поиск интегрированных решений
В сети есть открытые проекты и отладочные платы частотных преобразователей с полной документацией и неплохо документированным софтом. Остаются неясными только вопросы оптимальности архитектуры, альтернативной компонентной базы, безопасности, электромагнитной эмиссии, надежности и прочая мелочь вроде диагностики, зазоров, клем, ремонтопригодности... Словом вопросов остается много.
Мы начали с покупки, казалось бы, солидного решения от фирмы Microchip. Коллеги по соседству тоже делали ЧП на Microchip, и я подумал что это то что нужно. Да, там еще был и корректор мощности.

Эта плата сгорела после первого же подключения реального 1 кВт AC мотора. Изучив трассировку плат, стало понятно, что не сгореть это не могло. Вспыхнула пара дорожек под процессорным модулем. Что-то не рассчитали с их шириной. От решений Microchip сразу отказались и больше не возвращались. Все-таки нишевые микроконтроллерные архитектуры — это не наше. А тут еще такой фейл.
Были еще рассмотрены решения от ST, TI, NXP(Freescale), Infineon. Все хотят привязать разработчика к своим семействам микроконтроллеров. Используют для этого все средства - от лицензионных соглашений, до закрытых библиотек и программных инструментов. Этот мир вдруг показался неуютным.
Изучение других ЧП
Так как наборы разработчика от производителей чипов перестали вызывать доверие, то вторым шагом было посмотреть, как сделаны промышленные ЧП. Интересно узнать какие там микроконтроллеры, сколько их, какие силовые элементы, драйверы и прочее.
HANNING ELEKTRO-WERKE GmbH & Co. KG.

Это изделия, относящиеся к классу встраиваемых. Имеют пассивное охлаждение, т. е. в них отсутствуют вентиляторы. Лишены всяких элементов ручного управления и индикации, поскольку ставятся в труднодоступных местах. Предполагается подключение к неким внешним панелям управления через интерфейс RS485. Теоретически должны быть идеально согласованы с управляемыми ими моторами.
Правда опыт эксплуатации несколько испортил впечатление. Несмотря на наличие усиленных EMI фильтров и специализированных микроконтроллеров несколько таких преобразователей у нас сгорело просто потому, что заклинивало редукторы у моторов. Ниже показаны снимки внутренности одного из ЧП данной серии.

OMRON 3G3MX2-A4040-E.

Это ЧП общего применения c 3-фазным входом. Очень многофункциональный. Настолько, что одних только регулируемых параметров в нем около 700. Мануал 350 страниц. Состоят из четырёх многослойных плат с двухсторонним монтажом. Решение довольно дорогое для мелкосерийной разработки, но все равно интересное с точки зрения применяемых вычислительных ресурсов.

Преобразователь OMRON не имеет корректора мощности, но в случае необходимости дополнительного подавления пульсация тока в разрыв DC шины можно подключить внешний мощный дроссель. Также нет стартового реле с ограничителем тока при подаче напряжения, эту роль скорее всего выполняет твердотельный ключ с резистором 13 Ом. Обмен с сервисной программой несмотря на USB очень медленный. ЭМИ-фильтра на борту нет. Отличаются повышенной перегрузочной способностью, видимо обусловленной оригинальным исполнением IGBT модуля.
Invertek OPTIDRIVE P2

Частотный преобразователь OPTIDRIVE P2 очень технологично скомпонован и послужил образцом для нашего проекта. Выполнен также на двух микроконтроллерах, но до второго добраться не удалось. В качестве силового элемента использована сборка SPM 45 Series от фирмы FAIRCHILD.
Еще изучались преобразователи Lenze SMVector (выполнен на MC9S12E128, 16 bit, 128 KB Flash, 8 KB RAM, 50 MHz и MC68H0908, 8 bit, 32 KB Flash, 512 B RAM, 8 MHz)
Shenzhen INVT Electric Goodrive20-EU
И наконец на самом пике дефицита пришлось изучить преобразователь, разработанный в Китае - Goodrive20-EU. Надо признать, что Goodrive20 явился примером экономии на всем: меньший чем у остальных размер радиатора, меньшая емкость конденсаторов, всего один микроконтроллер, отсутствие ЭМИ-фильтра, лаконичная документация, сравнительно бедный набор регулируемых параметров.

И тем не менее он работал не хуже чем Omron MX2 в некоторых применениях, хотя и с нюансами в способе управления. В частности, долго инициализируется после подачи питания.
Обобщенная структурная схема ЧП
В результате сформировалось представление об обобщенной архитектуре ЧП.
Во-первых, во всех исследованных ЧП применяются интегрированные IGBT модули. На дискретных транзисторах изделий не попадалось. Всегда есть узел ограничителя тока включения. Даже до мощностей в 3 кВт с питанием от однофазной сети не встречаются корректоры мощности (ККМ). Наличие EMI фильтра тоже не является обязательным. Не бывает в ЧП и предохранителей. ЧП всегда включают через защитные автоматы.
Интерфейсная часть ЧП гальванически развязана от силовой части. Силовая часть находится под управлением микроконтроллера с архитектурой DSP или RISC. Микроконтроллеры при этом не самые быстрые по современным меркам, не более 80 МГц. Интерфейсная часть может содержать, а может и не содержать отдельного микроконтроллера. Измерители токов фаз на двигателе делаются на основе шунтов, присоединённых к минусу DC шины. Важным компонентом промышленных ЧП является сдублированный узел экстренного гарантированного отключения мотора (safe torque off, STO). Это узел позволяет отказаться от пары внешних контакторов для отключения питания ЧП в экстренных случаях.

В результате анализа было решено для своего ЧП использовать один микроконтроллер, но более производительный. Им стал MK60FN1M0VLQ12 (ARM® Cortex®-M4, 120 МГц, 1 MB Flash, 128 KB RAM). В пользу такого выбора было несколько аргументов. На тот момент фирма Freescale выложила хороший программный инструментарий для разработки ПО управления двигателями и его отладки. И был расчёт на применение вычислений с плавающей точкой вместо вычислений с фиксированной. Это облегчило бы отладку, моделирование и тестирование. Про остальные аргументы было в этой статье.
Конструкция ЧП
Поскольку ЧП встраиваемый, то он не нуждается в специальном корпусе. Поэтому был изготовлен простой кожух из листовой стали с креплением двух вентиляторов. Была цель максимально упростить сборку и разборку ЧП. Пилотная версия нашего ЧП в свое время размещалась на одной плате. В этой версии стало три платы. Таким образом ЧП получился более компактным. А его модульность позволяет удешевить модификации функциональности и проще выполнять изменения в компонентной базе.
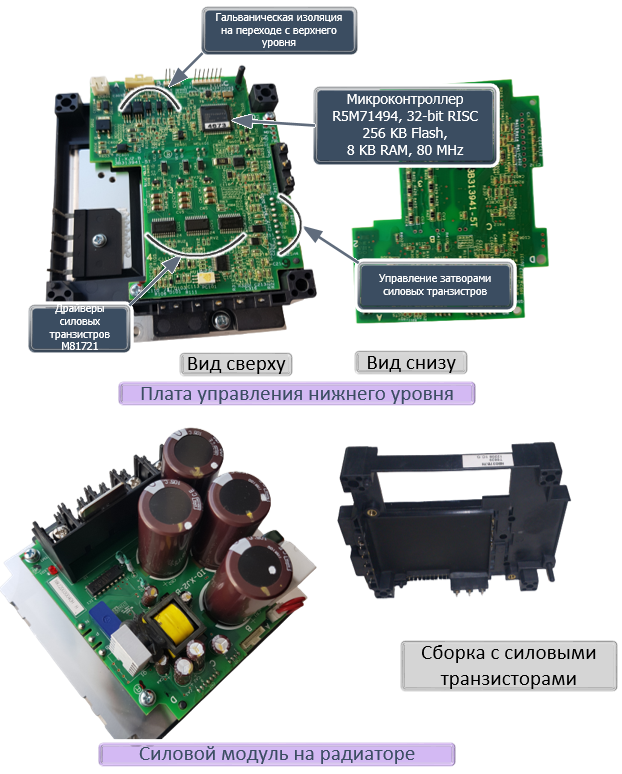
ЧП состоит из трех основных плат:
Управляющая плата с микроконтроллером и внешними интерфейсами.
Плата DC шины, на которой расположен блок питания и блок конденсаторов
Силовая плата, на которой расположен IGBT модуль, силовые входы и выходы, измерители тока, EMI фильтр.

Компоненты ЧП
Управляющая плата
На управляющей плате находится микроконтроллер и гальвано изолированные внешние интерфейсы:
интерфейс для подключения внешнего квадратурного энкодера
интерфейс RS232
интерфейс CAN
интерфейс USB
-
три дискретных выхода и один дискретный вход
Управляющая плата соединяется с силовой платой двумя плоскими шлейфами через разъемы X7 и X8. Через X7 проходят сигналы управления затворами IGBT модуля. Через X8 проходят сигналы измерения тока и напряжения, линии I2C и несколько других сигналов. Похожая схема применяется в Goodrive20-EU.



Кроме того, на управляющей плате находится литиевый аккумулятор для поддержания энергонезависимой работы часов реального времени, держатель для uSD карты и зуммер. Это не обязательные компоненты, но полезные на этапе разработки, отладки и диагностики ПО.
Плата DC шины
DC шина находится под напряжением 310...340 В и через нее проходит средний ток до 10А на максимальной мощности. На плате размещен блок питания в виде отдельного модуля. Так решено было сделать питание просто ради упрощения дизайна платы. На плате находится транзисторный ключ Q3 управляющий вентиляторами. Вентиляторы включаются только при достижении IGBT модулем определенной заданной температуры.


Силовая плата
Главным элементом всего устройства является IGBT модуль.

В нашем случае использован модуль FSBB30CH60C. Модуль порадовал своей исключительной надежностью. В течении разработки не сгорел ни один модуль. Некоторое время назад это был самый доступный и недорогой модуль. Модуль управляется напрямую логическими сигналами и имеет встроенные защиты от недонапряжения и короткого замыкания.

Немного усложняет дело отсутствие температурного сенсора, встроенного в модуль. Термосенсор пришлось сделать отдельно на микросхеме MAX31725MTA+ на своей маленькой плате и разместить под корпусом IGBT модуля. Проект термосенсора находится в директории TempSensor. Термосенсор соединен с микроконтроллером интерфейсом I2C.
Измерение токов на трех выходах IGBT модуля сделано иначе чем в обычных ЧП. Вместо шунтов поставлены гальвано изолированные датчики Холла ACS759LCB-050B-PFF-T. Это более дорогое решение, но позволяющее более креативно подойти к выбору способов модуляции и упростить трассировку. Традиционные шунты в нижних плечах силовых транзисторов ограничивают возможные типы модуляций. Это не проблема в промышленных ЧП, но наш сделан еще и в экспериментальных целях и мог бы быть применен не только с асинхронными двигателями, но и с синхронными, и с более экзотическими.


Программное обеспечение
Фирмаваре ЧП состоит из двух частей: начального загрузчика и основного приложения.
Начальный загрузчик находится в директории Firmware/Inverter_bootloader и позволяет загружать основное приложение через CAN и через интерфейс RS232. Бинарный образ приложения создается утилитой BIB. Утилита находится в директории Firmware/Loader.
Помимо прочего образ может быть утилитой зашифрован. Загрузчик умеет расшифровывать образы.
Сам проект рабочего приложения находится в директории Firmware/Inverter_firmware. Компилируются проекты в среде EWARM, версии не выше 670.3
Представленное программное обеспечение расчитано на очень простое подключение ЧП.

ЧП управляется по шине CAN в режиме скалярного управления.
Почему скалярного? Скалярное управление несмотря на все недостатки при этом характеризуется более низким уровнем шума издаваемым мотором, по крайней мере, когда имеем дело с ЧП, описанными выше и безсенсорным управлением. При стабильной нагрузке и номинальной скорости двигателя в основном рабочем цикле скалярное управление хорошо себя показывает.
Принято считать ("Practical Variable Speed Drives and Power Electronics", Malcolm Barnes 2003 ) что безсенсорное скалярное управление обеспечивает точность скорости в 1% и время отклика момента 100 мс, а векторное безсенсорное соответственно 0.5% и 10 мс.
Результаты качества потребления энергии частотным преобразователем на разных мощностях при частоте модуляции 16 КГц:

Используемы в таблице обозначения:
V(V) – текущее действующее входное напряжение однофазной сети в вольтах
THD V(%) – total harmonic distortion, Коэффициент нелинейных искажений по напряжению
I(A) – действующее значение тока в амперах
THD I(%) – total harmonic distortion, Коэффициент нелинейных искажений по току
I peak (A) – пиковое значение тока в амперах
CF I (A) – Коэффициент амплитуды сигнала (крест-фактор) в амперах
|P| (W) – Активная потребляемая мощность в ваттах
Q (Var) – Реактивная потребляемая мощность. Единица измерения – вар
S (VA) – Полная потребляемая мощность. Единица измерения ВА
PF - Коэффициент мощности
COS PHI – косинус фи
Несколько слов о безопасности
Сначала о сохранности самого преобразователя. Всегда надо помнить о такой вещи как реформинг. Может случиться так что высоковольтные электролитические конденсаторы, установленные в ЧП где-то долго хранились, или сам ЧП не был подключен в сеть более года. В таком случае у конденсаторов истончается диэлектрический слой, и они могут не выдержать быстрой подачи на них полного номинального напряжения и рабочего тока. Тогда требуется реформинг или, иными словами, осторожное постепенное включение.
Защита от возгорания. Она организуется несколькими способами. Сами печатные платы должны быть изготовлены по соответствующей технологии и иметь UL маркировку. Далее необходимо обеспечить ширину силовых проводников на плате, исключающую их возгорание раньше, чем произойдёт выключение внешних силовых расцепителей.
")
Электробезопасность. Корпус ЧП обязательно должен заземляться. Варисторы на входе ЧП обеспечивают защиту от кратковременных перенапряжений, но при длительных перенапряжениях они сгорают, оставляя толстый слой проводящей сажи.
Тут в действие вступает заземление. Однако ставить чувствительные реле утечки на частотные преобразователи не рекомендуется, поскольку емкость мотора относительно земли настолько существенна, что может вызвать утечку большую чем уровень срабатывания реле. Поэтому заземление должно быть максимально надежным. Стоит также помнить, что заземление само по себе не обеспечивает защиту от электромагнитных помех, излучаемых самой цепью заземления. Поэтому все информационные кабели если они лежат рядом с цепью заземления или заземляющими конструкциями должны иметь свои экраны подключённые к собственным локальным землям. И такие экраны не должны образовывать замкнутых контуров.

Эксплуатационная безопасность. На роботизированных объекта, станках, агрегатах, подъемниках, кранах, эскалаторах - везде есть средства экстренной остановки в виде концевиков, датчиков, микровыключателей и проч. Чтобы люди сами могли активизировать экстренную остановку устанавливаются большие заметные красные кнопки. Все эти средства объединяются в электрическую цепь безопасности. Конечной точкой этой цепи являются контакторы, реле или иные ресцепители, обрывающие подачу тока на электродвигатели. На частотных преобразователях в роли расцепителя выступает узел STO (safe torque off) упомянутый выше. Обычно есть два дублирующихся входа STO, но в нашем ЧП есть только один. Это означает что для реализации дублирования средства безопасности дополнительно необходим внешний контактор, разрывающий цепь питания к ЧП при разрыве цепи безопасности. Так требуют стандарты.

В результате у нас получился вот такой ЧП

Для тех же кто заинтересовался проектом в директории JTAG_isolator лежит проект платы изолятора JTAG интерфейса. Очень трудно отлаживать электронику подключенную в сеть без хороших изоляторов.
К сожалению, формат короткой статьи для хабра не позволяет описать все перипетии разработки, алгоритмы, архитектуру софта и прочие подробности. Поэтому заранее прошу понимания читателей если тема не раскрыта в желаемом объёме.
Ещё есть время.
Все материалы по проекту частотного преобразователя лежат и накапливаются тут - https://github.com/Indemsys/Frequency_Inverter
Комментарии (46)

kipar
04.01.2022 14:56+1Выглядит интересно, круто что выкладываете наработки.
Может глупый вопрос, но скалярное управление - это ограничение железа или только вопрос прошивки? А то казалось бы - даже вход для энкодера есть, т.е. можно не только векторное но и close-loop управление сделать.

Indemsys Автор
04.01.2022 15:14+2Финансирование разработки сократилось после достижения приемлемого результата и на развитие векторного управления просто не хватает времени. Хотя аппаратная часть, да , полностью к этому готова.


ViacheslavNk
04.01.2022 20:20+3Крутой проект, давно, когда занимался системами управления асинхронными приводами, контроллер реализовывали на DSP процессоре Texas Instrument, TMS вроде из серии 320. В те времена в России бешено шла “автоматизация” даже в глухих деревнях демонтировались водонапорные башни и заменялись ПЧ-насос и датчик давление с ПИД регулятором и оказалось, что скалярного управления было достаточно для рынка, что векторным или даже прямым управлением моментом (DTC) не было смысла заниматься, а потом оказалось, что закупать ПЧ из Китая и не только (ABB, Siemens и пр.) стало “дешевле” и быть просто сервисным центром.

vipassa
04.01.2022 21:23Интересный проект! Но, как было правильно подмечено - "цель должна оправдывать средства"...

BelerafonL
04.01.2022 22:34+1Спасибо, прочитал с удовольствием. Видно, что написано профессионалом со знанием дела. Я приводчик, на фирме делаем тоже самодельные частотники, и ни одно слово в статье у меня не вызвало какого-либо дискомфорта или "да зачем так делать".
Единственно что не очень понял исходный посыл - большинство промышленных электродвигателей на 380В линейного действующего напряжения. Частотником, который питается от однофазной сети, такое напряжение не выдать. Значит или нужен более низковольтный электродвигатель, что относительная редкость, или недоразгонять/недогружать до номинала двигатель на 380В. Какой юзкейс такого частотника? Почему не трёхфазный с 540В на шине постоянного тока?
Indemsys Автор
05.01.2022 00:08+4Двигатели на 380 В когда их обмотки включены звездой.
Но у обычных асинхронных двигателей в клемной коробке всегда можно перекинуть перемычки на подключение треугольником. И тогда номинальное напряжение будет 220 В.
На шильдиках обычных двигателей также всегда указываются параметры и для звезды и для треугольника.
Поэтому в статье на схемах везде подчеркнуто, что подключение производится по треугольнику.
AndreyUA
05.01.2022 23:01Да, но есть двигатели 380/660. Поэтому на 380 В универсальный вариант частотника.

fndrey357
06.01.2022 11:13Мелкие движки - осбенно вентиляция, ставятся вообще на расщепителях. Приходит одна фаза 220В и расщепляется на 3 фазы 220В, движок соединяется треугольником и в работу. Когда на 0,036кВт ставится частотник - движок дешевле электроники - это значит работают ведущие поставщики вентоборудования.
AndreyUA
06.01.2022 15:34Мне кажется, что фазорасщепители и т.д. - это скорее домашнее использование, так называемый SOHO. Например, готовое законченное изделие, которое расчитано на подключение в обычную розетку. При проектировании не притянуть 3 фазы, а использовать одну - это очень узкий кейс, связанный с какими-либо ограничениями, а не стандартное решение.
fndrey357
07.01.2022 04:45Вентиляшка вся сидит на таких решениях. Когда на мотор 50Вт ставят шкаф управления с частоником, потому, что промышленный двигатель 3*380. Потом начинаешь искать, чем его защитить по 3 фазам - токи маленькие. И приходится, чтобы не городить огород, делать питание на 220В - токи нормальные, автоматы, селективность и т.д.
Какая-никакая, а ниша однако.
Кстати на чипмейкере как-то была тема "Регулятор оборотов на ардуино" .

mcu_by
04.01.2022 22:37+5Посмотрел исходники вашего проекта, вы используете либу Inverter_firmware/MotorControlLib, и как я правильно понял из либы у вас PMSM, все важные алгоритмы для вашего проекта закрыты, есть только ашники. Плюс в статье у вас ACIM привод, а pmsm не равно ACIM в управлении, если вы хотите реализовать foc для amic, придется писать самостоятельно алгоритмы (и там действительно все не просто, почитайте реализацию наблюдателей хотя бы для pmsm). Да и векторное для АС приводов у вас не заработает с этой либой никогда. Для скалярного управление это библа тоже не подойдет (как я правильно понял поэтому в сами и реализовывали скаляр. управление). Идея хорошая), но без алгоритмов все будет провально. Если вы использовали эту либо значит не совсем понимаете как векторное управление реализовывается на практике (могу ошибаться), почитайте Анучина А.С. (https://habr.com/ru/company/npf_vektor/blog/389793/ в статье Векторная датчиковая структура управления асинхронным двигателем) . посмотрите проекты: VESC-controller, ODrive) Удачи с проектом! Хорошая статья!
Indemsys Автор
05.01.2022 00:19+2Согласен. Примение закрытых библиотек это недостаток. Но я не нашел тогда открытых проектов с понятным описанием теории. И библиотеки Freescale были на тот момент самыми убедительными.
Но выложенные исходники точно работают с асинхронными двигателями и в скалярном режиме.
С проектами на которые вы дали ссылки я знаком. Интересные безусловно.
mcu_by
04.01.2022 23:23А вы думали использовать плис + мк. На плис гораздо легче откатать алгоритмы foc , управление ключами и т.п. а на мк вынести только ui управления кнопки и др. ? Плюс когда вы развяжите критично важный узел через плис, программирование мк будет сказка очень легко. На мк легче навернуть пром сети и др. А foc для acim уже будет сам все на плис.
Indemsys Автор
05.01.2022 00:26+1С использованием ПЛИС я встречал проекты в научной литературе.
Но сейчас есть микроконтроллеры на 1 ГГц с плавающей точкой двойной точночсти и пикосекундными градациями длительности ШИМ импульсов. Можно делать очень сложные алгоритмы FOC.
Я все же думаю что больше всего упрощает отладку цифровых алгоритмов использование плавающей точки.
order227
05.01.2022 02:21Полагаю основное преимущество fpga тут будет в реальном распараллеливание процессов и вычислений + аппаратная реализация всех возможных защит из коробки. Однако для частотников на пару киловатт это ну уж слишком жирно, в первую очередь по экономике. FPGA в продакшене встречаются вроде только на больших мощностях, ну или как блок реализации защит во всяких "интеллектуальных инверторах" от того же semikron.

dernuss
05.01.2022 12:14FPGA сейчас не дорого, тот же например spartan 6
однако для того чтобы убедится что он однозначно лучше микроконтроллера, надо попробовать сделать, а это много ресурсов временных займёт. Далеко не каждый потянет такую разработку
order227
05.01.2022 14:00На мелкой серии цену решения формирует все таки не чип, а затраты на разработку. Слепить на С/С++/asm из готовых библиотек проект гораздо быстрее, а следовательно дешевле, чем написать все с нуля на HDL каком-нибудь.
Да и по цене чипа, кстати, даже spartan не интересны на фоне того же dsPIC33 за пару $. То есть вдруг захочется сделать тысячи штук, то выбор будет очевиден.dernuss
05.01.2022 15:25-1То что на си из готовых библиотек быстрее, это понятно.
Однако у hdl есть свои плюсы, если алгоритм раз написан самим, его очень легко перенести на любую другую фпга. То есть получается независимость от производителя фпга. Что не может не радовать.
dsPIC33 за пару $ тоже так себе, звучит, когда на складах около нуля;)
Ну и у тому же несколько $ так себе экономия, когда сам конечный девайс дорогой.
Опять же железные защиты это очень круто.
Indemsys Автор
05.01.2022 12:24-1Крутейшая защита - дублирование или троирование.
Для этого делают многоядерные uC c lockstepВ случае же с ПЛИС будет гораздо больше проблем с кондиционированием сигналов, т.е. приведением их в кондицию безопасную для самой ПЛИС.
Необходимость в ПЛИС я вижу когда речь идет о мультифазном многоступенчатом управлении. Таких стандартных блоков просто нет в микроконтролерах общего применения. Но это речь о мощностях в десятках киловат на централизованной платформе.

premierhr
04.01.2022 23:25+1Ширина полосы пропускания вашего датчика тока - 120кГц, время отклика на скачок тока - 3(!!!) мксек, а суммарное 4. То, что вы не спалили ни один силовой модуль иначе как чудом не назвать. Он годится максимум косинус фи мерить.
Indemsys Автор
05.01.2022 00:48Да, задержки отклика измерителей тока является проблемой.
Синхронизация момента выборки и центрально симметричный ШИМ помогает решить проблему.
order227
05.01.2022 02:29+1время отклика на скачок тока - 3(!!!) мксек
Так автор и не использует ACS-ы для защиты от КЗ. Собственно, если я правильно понял, то в самом модуле IGBT реализована защита от ударного тока/КЗ, сигнал с шунта идет в модуль, внутри наверняка компаратор и простейшая логика.
На ACS и прочих датчиках тока обычно реализуют защиту по среднему току (или вообще не реализуют), а их основная задача все таки обеспечивать обратную связь по току для алгоритмов управления.premierhr
05.01.2022 09:25А зачем удорожание? В модуле выведены три силовых эмиттера отдельно, что очень удобно для формирования трёх значений, представляющих значения фазных токов, сформировать ШИМ для каждой фазы при этом много проще, однако собраны в кучу, и так представляю действительно реализуют простое ограничение по току. И очень интересно как реализовано считывание тока с шунта Ibus, судя по схеме, там отрицательное относительно Dgnd напряжение. Полный отказ от Microchip из-за ошибки схемотехника, ну такой себе вывод.
Indemsys Автор
05.01.2022 11:15+1Нет, шунты в эмитерах не являются удобством. Поскольку они привязаны к силовой земле. А микроконтроллер измерения ведет по отношению к своей аналоговой земле. В промышленных частотниках используют кучу деталей чтобы развязать эти земли и сохранить целостность сигнала.
Я решил взять детали дороже, но уменьшить общее их количество и разнообразие. При этом упростилась трассировка и повысилась гибкость применения.А в маломощных одноплатных схемах, да, сигналы с шунтов эмитеров можно сразу подавать на АЦП микроконтроллера, и тогда это удобство.

VT100
05.01.2022 12:33+1В старых(?) Yaskawa/Omron серии 3G3JV/CIMR-J7 МК вполне себе сидит на минусе звена постоянного тока. Отвязаны только интерфейсные сигналы.
premierhr
05.01.2022 20:27Схемотехнических приемов куча, от соединений Кельвина до трансформаторов тока, последние выигрывают вообще по всем позициям. Так что с измерением шунта Ibus?
order227
05.01.2022 02:03с архитектурой DSP или RISC
Наверное DSP это все таки не архитектура? Сами DSP могут быть реализованы на разных архитектурах, обычно у каждого производителя своя и не одна, например, KeyStone у ti. Поправьте если не прав.
Увидел, что у вас плата с мозгами связа с силовой через обычный не экранированный шлейф, не вызывает ли это проблемы с наводками? Так понимаю по нему и ШИМ бежит, и аналоговые сигналы в АЦП.
Не задумывались ли про такие датчики? И I2C не надо тащить достаточно далеко, и точка контакта датчика намного лучше + не нужна дополнительная платка))
Традиционные шунты в нижних плечах силовых транзисторов ограничивают возможные типы модуляций
Тогда шунты прям в фазу и на них AMC1200 какие-нибудь :) Вообще с ACS когда-то были проблемы, правда со старыми 758, уж очень они чувствительны были с помехам, особенно при достаточно быстром разгоне, в итоге поменял на LEM, но это сразу х2 цена за датчик. В 759 с этим стало лучше?
Indemsys Автор
05.01.2022 11:00+1Термосенсоры я разработал так чтобы их мог запаять контрактный производитель, а выносными отдельно монтируемыми сенсорами они не занимаются. Т.е. выбор сенсора был просто вопросом технологичности сборки.
По поводу шунтов против холлов, то я сейчас тоже бы предпочел что-то вроде дельта-сигма модуляторов AMC1303x. Но специализированные приемники для таких модуляторов есть только в очень нишевых микроконтроллерах или ставить те же ПЛИС. Это расходится с нашей линией максимальной универсальности платформ. Я сейчас рассматриваю возможность применения для этого демодуляторов STM32H753
order227
05.01.2022 14:04Ага, теперь понятно, спасибо за развернутый ответ.
рассматриваю возможность применения для этого демодуляторов STM32H753
А почему не хотите сразу посмотреть на TMS320F28, там все уже из коробки идет? Давно не слежу за их продукцией, но вроде там новые чипы появлялись за интересные деньги уже типа 5-7$.

gapel
05.01.2022 10:29простите, а почему вы, например, на лидеров рынка не посмотрели? Например ABB, Siemens?
Так по сути ПЛК встроен, функционал богатый, защита, гарантия, интерфейсы, вот это все.
Indemsys Автор
05.01.2022 10:48К нам какой продавец не придет, то всегда с утверждением что они лидеры рынка.
Про лидерство ABB и Siemens не знал.
Видимо в каждом регионе свои лидеры. Omron он же Yaskawa тоже имеет функции ПЛК.
Тут надо еще помнить, что многие модели разных производителей выполнены на одинаковых платформах. Поэтому сам брэнд еще не говорит об оригинальности платформы.gapel
05.01.2022 14:43Ну как бы мировая доля в преобразователях частоты в сегменте до 1000 В - это достаточное основание для утверждения про лидерство.
По регионам - только в США ситуация другая, насколько я знаю. Азиатский регион - тоже в тройке, в ЕС понятно что просто первые два места.
Как раз таки у Сименса и АББ своя платформа, если уж говорит про китайцев, то скорей будет наоборот))
CYRIX-MII
05.01.2022 10:40-3От чтения сложилось впечатление описания некоего "сферического" ЧП в вакууме с непродуманным ТЗ. Вообще не понятно, что хотел получить в итоге разработчик и для чего применить!!
Нельзя разрабатывать устройство вне знания о сфере его будущего применения, ведь от этого, по сути, зависит весь концепт. Так, например, ЧП для питания двигателя электромобиля это одно, а для питания станка другое, в первом случае микроконтроллера может не быть вовсе.
Признаюсь, глядя на нынешних "разработчиков", покорителей ЕГЭ и "Ардуино", становится "спокойно" за будущее России.
order227
05.01.2022 14:15+4покорителей ЕГЭ и "Ардуино"
Разве данная статья не является доказательством ошибочности вашего мнения? Вроде как ардуиной тут и не пахло, а как ЕГЭ может повлиять на знание электроники вообще загадка. Обычно если человеку интересно, то ему сложно помешать получить знания нужные, особенно при современном уровне доступа к информации.
становится "спокойно" за будущее России
Так полагаю раньше трава была зеленее, небо голубее, а хер стоял крепче? Не переживайте, будущее у нас такое же как везде. Как и в любой другой стране у нас есть и ардуинщики, и компании типа yadro/вектор/etc, пилящие сложнейшее железо и софт.



zatim
06.01.2022 01:24+1С интересом прочитал вашу статью. Как раз недавно в голове вертелась мысль сделать простой и дешевый, максимально упрощенный чп на мощность не более 1 кВт, доступный для повторения радиолюбителям и самодельщикам. Я хотел реализовать следующие особенности:
Игбт мост на рассыпухе, чтобы можно было подбирать транзисторы в зависимости от цены и необходимой мощности
Пассивное охлаждение
Одноплатный вариант, встраиваемый, например сразу в щит.
Минимум управляющих интерфейсов или вообще без них (например, rs232)
Установка оборотов - фиксированная, потенциометром прямо на плате, или рядом с ней, пуск/стоп - парой сухих контактов.
Управление 3х и однофазным двигателем.
-
фильтры эмс на плате предусмотреть, но установка на усмотрение собирающего.
Область применения - маломощные бытовые асинхронные однофазные и трехфазные двигатели (насосы, маломощные сверлильные и пр. станки)
Как вы считаете, исходя из вашего опыта, такая разработка была бы интересна широкому кругу потребителей?
Indemsys Автор
06.01.2022 10:42+1Если в этом дивайсе основная польза в снижении габаритов, то да такие тренды устойчивы.
Но тогда уже надо переходить на SiC MOSFET и делать унивесальную платформу.
Управление как асинхронными так и синхронными двигателями, гибридными и прочими. Тут я вижу привязку частотников к рынку моторов. Надо следить за преобладающими технологиями моторов. Тренды говорят что обязательно там должна быть и IoT технология, т.е. беспроводные интерфейсы, связь с облаками, нейросетевые алгоритмы предиктивной диагностики и большие данные.Но рынок DIY мастеров готовых купить насос или станок без инвертора, а потом искать инвертор к нему я плохо знаю. Тут ничем помочь не могу.
Может там большой спрос будет просто на add-on к Arduino. Тоже по своему интересно.
Buhram
06.01.2022 18:28Спасибо за статью. Есть несколько вопросов:
1) Как я понял, на управляющей плате, Х3 это вход аварийного выключения. Через гальваноразвязку вы его заводите напрямую на строб буфера U1 силовой платы. Мне показалось, что это может привести к выдаче очень коротких импульсов (плохой контакт линии, наводки) на включение/выключение, при этом, силовые ключи могут находится в линейном режиме. Может быть, стоит завести сигнал на вход аппаратного отключения выходов таймера микроконтроллера? Так можно будет более гибко настроить эту функцию, например, добавить защелки, фильтры, выдержки времени, дополнительную логику и т.д.
2) На управляющей плате есть сигнал BR_ON, который с микроконтроллера заводится на разъем Х9, но больше его нигде нет. Это так и должно быть?
3) Когда-то, для измерения тока в фазах PMSM, использовал токовые датчики Allegro ACS711. В процессе отладки выяснил, что они очень сильно подвержены влиянию внешнего магнитного поля. Рядом с платой стоял отключенный двигатель, и даже вращая ротор рукой, было видно как у датчиков плавает ноль. У своих вы такое не замечали?Indemsys Автор
07.01.2022 00:44Аппаратное независимое отключение буферов - обычное решение в частотниках. Так к примеру сделано в Goodrive20. Если использовать для этого специальный вход у микроконтроллера, то придется отдать на внешний аудит всю программу микроконтроллера чтобы получить серитификат безопасности и саму программу придется писать по жестким стандартам.
Сценарий с линейным режимом не совсем понял как может призойти.BR_ON был предназначен для управления внешними механическими тормозами, но функциональность не была реализована.
Охотно верю что у датчиков плавает ноль от магнитного поля, он еще плавает от температуры и просто нестабилен во времени. Поэтому их на плате 3, а не два как обычно , и перед каждым запуском ноль перекалибровывается.
vakhramov
Тоже нечто подобное подумывал в 2014 сделать(на ipm от infineon, там уже встроен датчик температуры, и тоже ttl управление), куча разобраных инверторов разных производителей, sew мелкие вообще на подпружиненных контактах ставят силовые модули.
Любопытна экономика проекта, о ней очень мало. Интегрированный плк с небольшим количеством IO может вывести продукт в сегмент интересных (особенно если он сможет по какой-то шине быть мастером для других частотников).
Не представляю, как это всё сертифицировать.
Indemsys Автор
Партия в 50 шт. стоила дороже китайских, но дешевле чем японские Omron на ту же мощность.
Сертификация встраиваемого ЧП в составе арегата трудностей особых не представляет.
Только надо показать дублирование систем безопасности и сделать хорошее экранирование с фильтрацией.