

В Robot Operating System сообществе мы решили в эру изоляции проводить специализированные мини митапы на темы связанные с робототехникой. Теперь каждая встреча будет посвящена одной теме, которую мы будем подробно обсуждать онлайн в ZOOM. Поэтому, каждый участник задающий вопросы и ведущий дискуссию важен, будьте активны!
Первая тема посвящена новому тренду в робототехнике - ROS2. Мы погрузимся подробно в технологию эффективной передачи данных между программными узлами робота, при соблюдении реалтайма и минимального расхода памяти. Расскажет про это специалист по разработке программного обеспечения для беспилотных автомобилей Роман Соколков.

Софт, который разрабатывался компанией Bosch для использования в ADAS системах автомобилей пришел в ROS2 и доступен всем робототехникам.
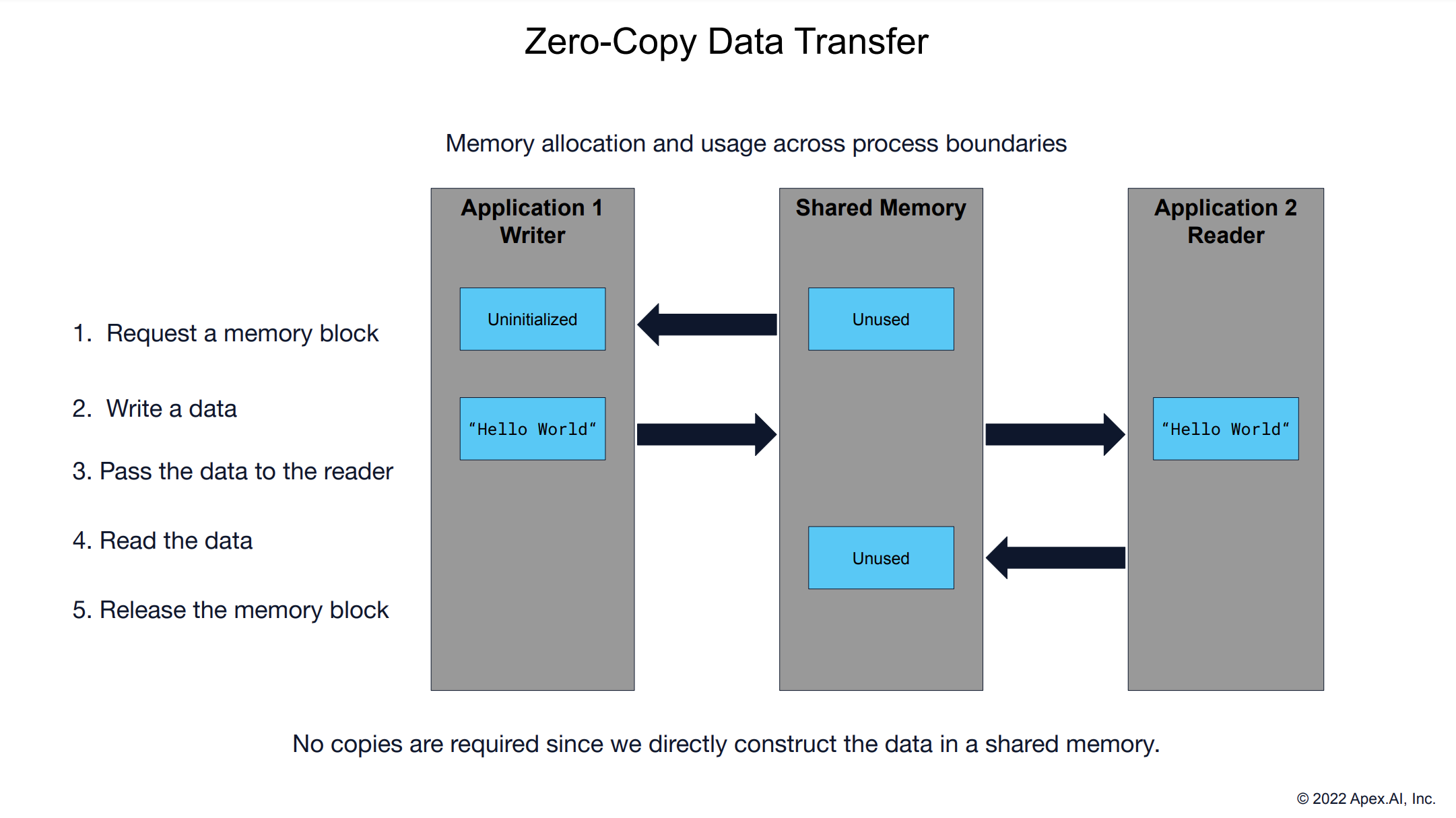
Большинство роботов сегодня имеют камеры или лидары с высоким разрешением. Для обработки данных с таких сенсоров требуется пайплайны компьютерного зрения с большим количеством компонентов и минимальной задержкой в обработке. К примеру, один и тот же кадр с FullHD 60 fps камеры, должен быть обработан такими компонентами как детектирование объектов, сегментация, визуальная одометрия, и т.д. Несжатый RGB снимок занимает около 6 мегабайт. Таким образом, процессору необходимо копировать более гигабайта памяти в секунду (60 * 6 * 3 = 1080 мегабайт в секунду). И это при условии необходимости всего одной копии между компонентами. К сожалению, без оптимизации ROS2 производит около 6-9 копий при передаче одного сообщения между нодами.
В ROS1 многие знают и используют nodelets, есть ли альтернатива в ROS2?
В этом докладе в четверг мы поговорим, как софт который используется в автомобильной индустрии помогает оптимизировать производительность роботов базирующихся на ROS2.
Ссылка на ZOOM трансляцию будет в ROS телеграм чате. Начало доклада 17:00, ориентировочна длительность 45 минут, плюс время на ответы на вопросы и общение.
Краткое содержание доклада:
What is zero-copy communication?
ROS 2 communication
ROS 2 zero-copy API
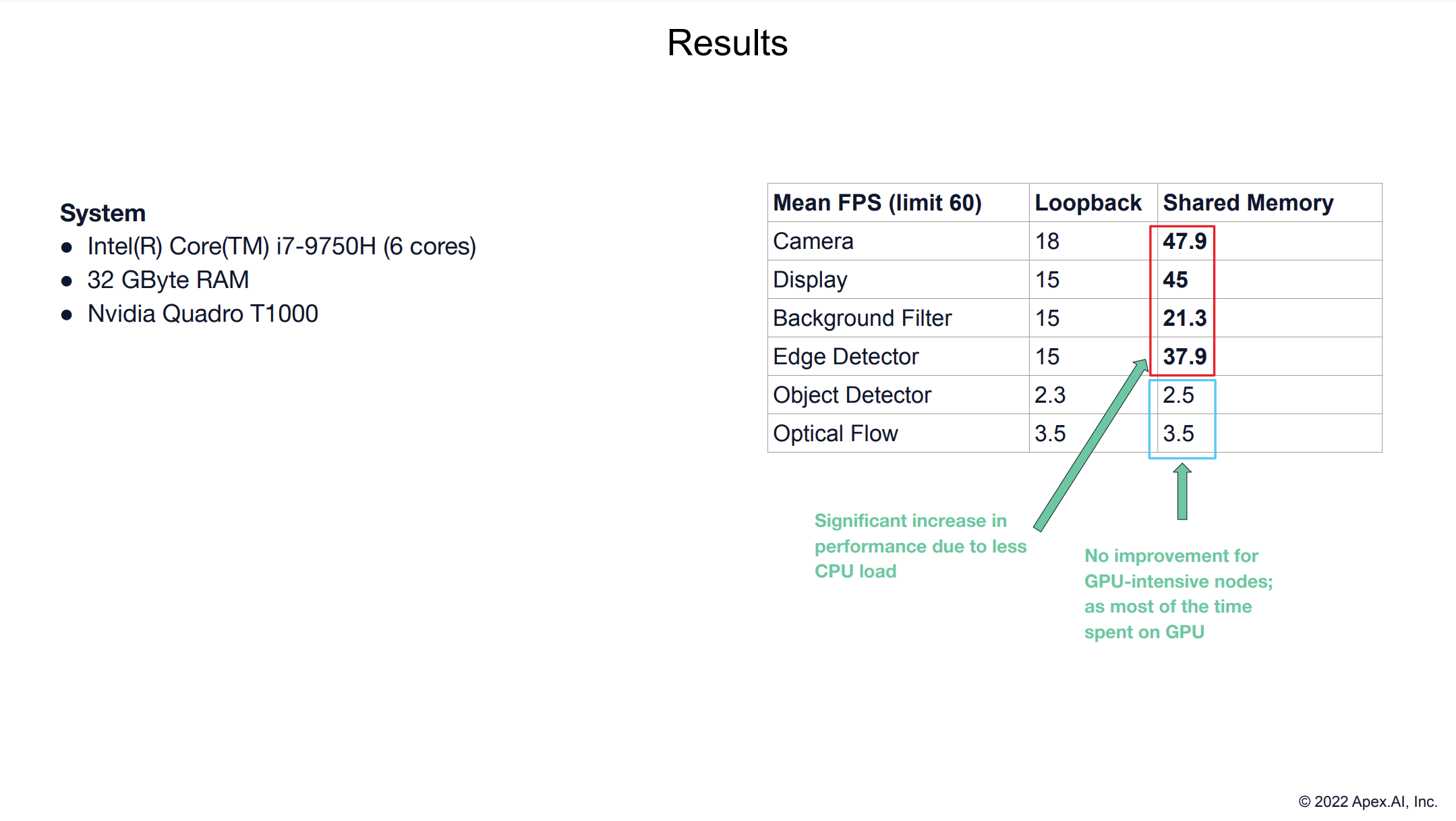
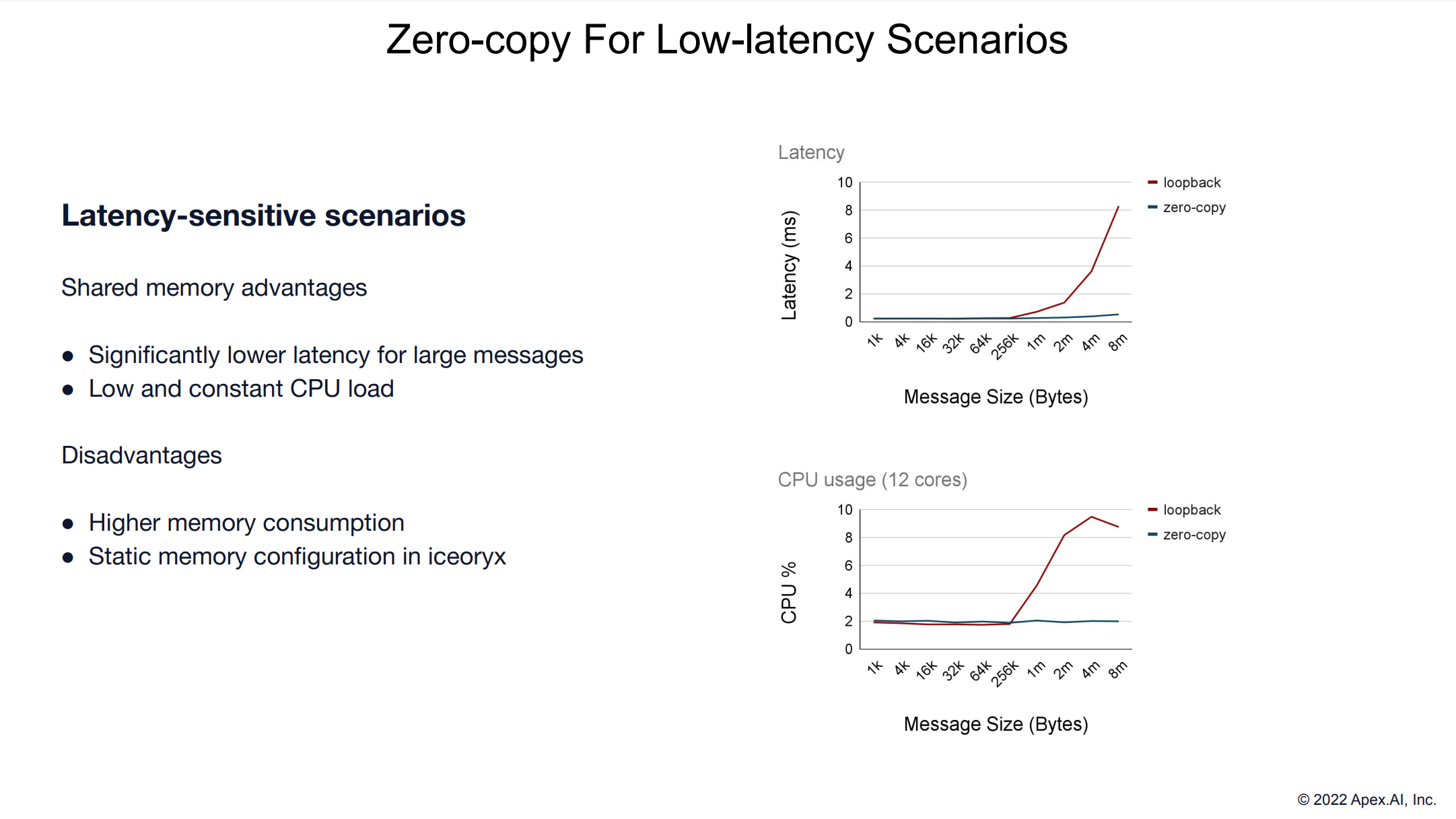
Demo
Визео запись доклада
Все слайды презентации доступны по ссылке.


На последней новогодней встрече робототехников была жаркая дискуссия по тому какой DDS использовать в ROS2. Мы даже провели опрос:

На этот раз Роман подробнее раскроет эту тему и можно будет задать вопрос про DDS практику беспилотных автомобилей.
Вступи в чат чтобы не пропустить новости.
RomanArzumanyan
Кадр 1920х1080 чаще всего занимает 3МБ, т. к. YUV420. Перевод его в RGB - пустая трата процессорного времени и пропускной способности памяти, т. к. информация в каналах цветности уже порезана, обратно её не вернуть.