
Предыстория
Летом есть много различных развлечений. Наш курортный город доверху заполняется туристами в сезон. Появляется нехватка рабочих рук у работодателя и желание заработать собственные средства у подростков. Одним из таких подростов являлся я.
В начале августа мой преподаватель в детском технопарке "Кванториум" сообщил мне о возможности поучавствовать в итересном инженерном конкурсе, в котором нам предстоит разработать прототип реального устройства предназначенного для сбора мусора с поверхности воды. Тема весьма и весьма актуальна для маленького курортного городка возле моря.
На самом деле, треков(тем) было достаточно много, но команда решила участвовать в треке "платформа для сбора мусора".
Трек изначально предназначался для "промдизайнквантумов" т.е. для дизайнеров, но т.к. устройство следовало не просто спроектировать, а еще собрать рабочий прототип и протестировать его в реальных условиях, то был приглашён к участию я, в качестве робототехника.
Развитие идеи
Изначально команда хотела использовать бионику, чтобы выполнить робота похожего на черепаху. К сожалению, данная идея была обречена на провал. Такую форму достаточно сложно выполнить. Подобного рода изгибы можно выполнить на 3D принтере, но мы не обладали принтерами таких размеров, чтобы распечатать устройство объёмом 30 литров на принтере, а собирать по частям слишком проблематично.

Было решено, что концепт необходимо переработать. Вот он после rework'а:

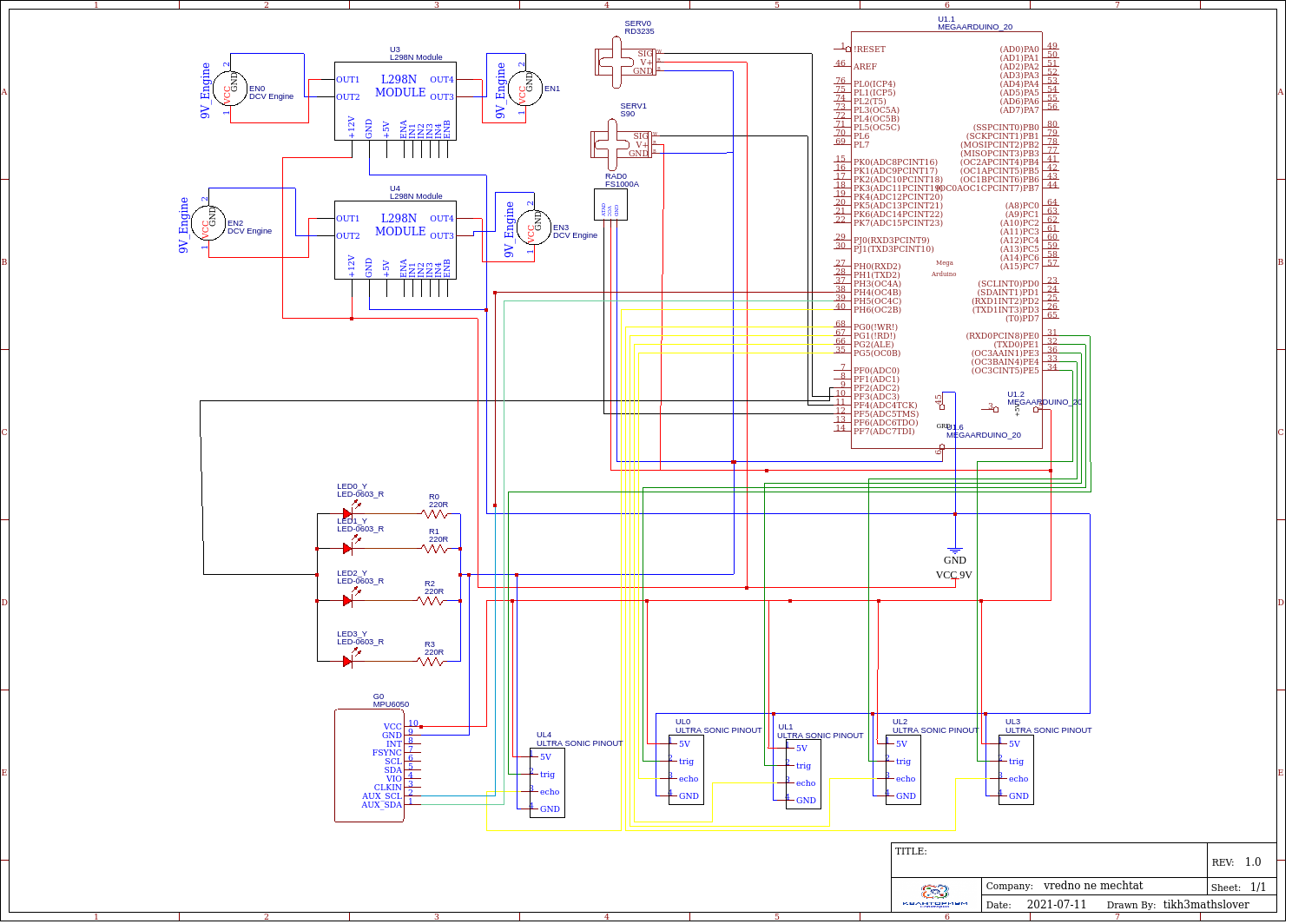
С этой формой действительно можно работать. Теперь детали стало проще вырезать на ЧПУ станке. Вопрос был за малым. Осталось сделать чертёж деталей для станка и схему подключения электроники. Важным критерием было обеспечение работоспособности устройства в автономном режиме на протяжении 30 минут в море. Поэтому будет робот питаться от батареи состоящей из li-on аккумуляторов формата 18650. Короче, вот схема:
И когда план сборки был разработан, настала пора уволиться с работы, чтобы всецело посвятить себя этому преинтресеному проекту. У команды было ровно 11 дней, чтобы выполнить достаточно весомый объём работы.
Практика
Processing.....
P.S.: Вот такая своеобразная проба пера вышла. Следующая часть будет лучше структурирована и более ёмкостной. Будет приложен видеоматериал и код программ, при помощи которых было осуществлено управление роботом. Если Вам понравилась эта публикация или Вы желаете что-то предложить, то буду рад Вашим комментариям.
Комментарии (4)

ITMatika
15.02.2022 09:41+1Тизер, который порождает вопросы без ответов.
Зачем использовать Мегу, если порты стоят пустыми?
Где GPS для автономного возврата в гавань или каналы для внешнего управления?
Ник МатСлюнявчик понравился ;)
tikh3 Автор
15.02.2022 21:46+1Вы сделали важное замечание. Да порты стоят пустыми, но у arduino mega больше количество портов, просто нам дали этот микроконтроллер, и мы не сопротивлялись =)
Касательно GPS-датчика, он нам нужен был лишь во втором этапе конкурса. А в первом этапе мы решили снабдить робота радиомодулем и управлять им с приложения на ноутбуке(об этом позже)
a40
Так а мусор то удалось в море собрать? Опытная эксплуатация была?
tikh3 Автор
Опыт эксплуатации будет описан в следующей статье. Там всё подробно(даже съёмка с квадрокоптера)