

Мы привыкли к тому, что в различных механических устройствах, требующих для своей работы электродвигатель, преобразование вращательного движения в необходимое рабочее — происходит с использованием множества промежуточных частей, что усложняет конструкцию, и уменьшает надёжность. Однако существует альтернатива и именно об этом мы и поговорим в этой статье.
Научно-технический прогресс, охватывающий одну сферу человеческой жизни за другой, постепенно видоизменял и способ передачи движения от электродвигателя. Если на станках начала прошлого века электродвигатель был один на всех и движение от него передавалась по валу через весь цех, с которого отдельные станки забирали необходимый вращательный момент с помощью ремённой передачи, —


то с ускорением прогресса, двигатель сначала переместился как можно ближе к конкретному станку, а потом и вовсе перешёл на каждый станок.

Претерпевали изменения и передаточные звенья от двигателя к станку. Например, широко распространились шарико-винтовые пары.
Источник: 3d-diy.ru
Причём шарико-винтовые пары только относительно недавно стали широкодоступными, их технология производства была достаточно отработана, а стоимость стала доступной для широкого круга потребителей. В свою очередь, разнообразные зубчатые передачи всегда были относительно доступными и широко применялись в различных схемах передачи движения. У зубчатых передач всегда была одна отрицательная сторона — довольно большой шум в работе и физический износ при трении зубьев друг о друга. Конечно, это можно несколько нивелировать тщательной смазкой, однако она притягивает к себе пыль, соринки, загрязняет рабочий редуктор (особенно если этот редуктор установлен на металлообрабатывающем станке).
Поэтому инженерная мысль искала какие-то другие решения, которые бы позволили избавиться от промежуточных звеньев. И такое решение было найдено — линейный электродвигатель!
Линейный двигатель — это электродвигатель, у которого статор и ротор «развёрнуты», таким образом, что вместо создания крутящего момента (вращения) — он создаёт линейную силу по всей своей длине.

Автор: Schnibbi678 — Own work, CC BY-SA 3.0, Источник
Однако линейные двигатели не обязательно прямые:

Автор: Lutex (talk) — собственная работа, CC BY-SA 3.0, Источник
Характерно, что активная часть линейного двигателя имеет концы, в то время как более традиционные двигатели устроены в виде непрерывного контура.
Было предложено множество конструкций линейных двигателей, которые можно разделить на две основные категории:
- линейные двигатели с малым ускорением;
- линейные двигатели с высоким ускорением.
Линейные двигатели с низким ускорением подходят для поездов на магнитной подвеске и других наземных транспортных средств. Двигатели с низким ускорением, высокой скоростью и большой мощностью обычно представляют собой линейные синхронные двигатели. (LSM) с активной обмоткой на одной стороне воздушного зазора и массивом магнитов с чередующимися полюсами на другой стороне.
Линейные двигатели с высоким ускорением обычно довольно короткие и предназначены для ускорения объекта до очень высокой скорости, например, рельсотрон:
Линейные двигатели с высоким ускорением предлагались для ряда применений. Их рассматривали для использования в качестве оружия, поскольку современные бронебойные боеприпасы, как правило, состоят из небольших снарядов с очень высокой кинетической энергией, для которых подходят именно такие двигатели. Многие американские горки, запущенные в парках развлечений, теперь используют линейные асинхронные двигатели для движения поезда на высокой скорости.
Обычно они имеют конструкцию линейного асинхронного двигателя переменного тока (LIM) с активной трёхфазной обмоткой на одной стороне воздушного зазора и пластиной пассивного проводника на другой стороне. Тем не менее рельсотрон постоянного тока с униполярным линейным двигателем является ещё одной конструкцией линейного двигателя с высоким ускорением.
Высокоскоростные линейные двигатели сложно проектировать по ряду причин. Они требуют большого количества энергии в очень короткие промежутки времени. Одна конструкция ракетной установки требует 300 ГДж для каждого запуска в период менее секунды.
Обычные электрические генераторы не предназначены для такой нагрузки, но можно использовать методы краткосрочного накопления электроэнергии. Конденсаторы громоздки и дороги, но могут быстро поставить большое количество энергии. Униполярные генераторы можно использовать очень быстрого преобразования кинетической энергии маховика в электрическую энергию.
Линейные двигатели с высоким ускорением также требуют очень сильных магнитных полей и магнитные поля часто слишком сильны, чтобы можно было использовать сверхпроводники. Однако при тщательном проектировании это не должно быть серьёзной проблемой.
В данный момент применение линейных электродвигателей ещё не до конца отработано и поэтому их технологии изготовления, и стоимость оставляет желать лучшего. Однако, использование линейного двигателя позволяет реализовать такие заманчивые опции, как движение с высочайшей скоростью ( до 1,8 м/с и более!), практически без механического износа:
Однако не все двигатели так хороши, например, плоские линейные двигатели (схема которого приведена несколько выше).
Кроме сложности изготовления, они отличаются повышенным нагревом, причиной чего являются вихревые токи Фуко, что ещё усугубляется ограниченными возможностями по охлаждению двигателя, потому что, как правило, на них сверху смонтирован рабочий стол обрабатывающего станка. Так как многие промышленные станки, особенно металлообрабатывающие, имеют повышенные требования к жёсткости и точности конструкции (для обеспечения требуемой точности обработки), — такие двигатели вносят искажения в работу из-за температурного расширения конструкции благодаря нагреву в процессе, причём нагрев может достигать даже 100 градусов Цельсия!
Альтернативой плоскими линейным двигателям являются цилиндрические линейные двигатели. Они устроены следующим образом: цилиндрическая обмотка расположена вокруг сердечника, образованного из магнитов. То есть, катушка может перемещаться по этому сердечнику.
В отличие от плоского двигателя линейный двигатель достаточно эффективно охлаждается и поэтому не требует сложных и проблемных конструкций для охлаждения, а так как у него отсутствует сердечник, — отсутствует и потенциальный источник тепла под воздействием вихревых токов.
Благодаря отсутствию сердечника в конструкции цилиндрического двигателя,— он может работать очень плавно, без скачков скорости:
Другими словами, на основе линейных электрических двигателей возможно построение ультрапрецизионного оборудования.
Кроме того, из-за симметричной конструкции происходит более эффективное использование магнитного потока, что позволяет добиться большей эффективности, за счёт использования в 2 раза меньшего количества редкоземельных магнитов.
Как было уже сказано выше, износ двигателя такого типа при работе весьма несущественный, так как непосредственный физический контакт катушки и цилиндра-оси при работе практически отсутствует.
Принцип, на котором базируется работа линейных двигателей, заключается в проявлении силы, которая воздействует на проводник с током в магнитном поле, то есть на законе Ампера (исходя из которого можно сказать, что максимальное усилие, которое может развить двигатель – является произведением силы тока в обмотках на векторное произведение магнитной индукции поля на вектор длины провода в обмотках).

Источник: www.abamet.ru
Другими словами, можно сказать, что у обычного линейного двигателя примерно от 30 до 80% длины обмоток служит для протекания тока под прямым углом к вектору индукции поля, а оставшаяся часть обмоток, по сути, только тормозит движение. Но это касается только плоского двигателя! В отличие от него, устройство цилиндрического линейного двигателя позволяет практически на всей длине обмоток протекать току под оптимальным углом в 90 градусов.
Для тех, кто хочет попробовать собрать подобный двигатель для собственных нужд, — я прикладываю ниже ссылку на диссертацию «Конструкция и сборка прецизионного линейного двигателя и контроллера» (Design and Construction of a Precision Tubular Linear Motor and Controller, — Bryan Craig Murphy), где достаточно подробно разобрана теоретическая база такого двигателя: Ссылка на диссертацию.
Согласно пункту 1.4 этой диссертации «Предлагаемая конструкция» (Proposed Design), автор рассматривает устройство, в котором движется шток, а блок катушек остаётся неподвижным (хотя это не суть, вы понимаете, что при желании можно двигать или то или то, или «всё сразу и много» © :-) ): устройство состоит из массива магнитов внутри массива электромагнитных катушек.
Катушки разделены на три фазы: A, B и C. В каждой фазе по три катушки; центральная катушка каждой фазы обращена в направлении, противоположном двум внешним. Таким образом, когда ток проходит через фазу катушек, центральная катушка будет генерировать магнитное поле равное по величине каждой из других катушек в этой фазе, но в противоположном направлении.

Источник картинки: Диссертация «Design and Construction of a Precision Tubular Linear Motor and Controller, — Bryan Craig Murphy»
Как показано на рисунке выше, в двигателе используются цилиндрические постоянные магниты. Пары магнитов ориентированы в том же направлении и расположены напротив соседних пар магнитов. Алюминиевая прокладка помещается между парами противоположных магнитов для облегчения конструкции. Когда ток течёт по трём фазам катушек, катушки генерируют силы на постоянные магниты в соответствии с уравнением силы Лоренца.
Самодельная конструкция, похожая на описанную (только всё наоборот — движется блок катушек) показана тут:
В своём нынешнем состоянии двигатель имеет время нарастания 55 мс, время установления 600 мс и перерегулирование 65 % при вводе с шагом в 1 см. Мотор способен выдержать максимальную осевую нагрузку в 26,4 Н. Эта максимальная сила значительно меньше, чем у коммерческих двигателей сопоставимого размера, однако эта конструкция позволяет более плавное позиционирование без эффекта «зубчатого колеса».
Работа заводского аппарата, примерно аналогичной конструкции, как в этой диссертации — показана на видео ниже:
Подытоживая, можно сказать, что широкое использование линейных двигателей только начинает свою жизнь, и каждый может попробовать собрать свою конструкцию. Тем более что благодаря своей простоте, — такой двигатель собирают даже энтузиасты. Для высокоточного движения в конструкции можно использовать датчики положения.
Как часть сервомеханизма, цилиндрические линейные двигатели могут обеспечить одновременное сочетание высокой тяги, высокой скорости и высокой точности, — далеко за пределами возможностей большинства других типов приводов.
Например, такие двигатели с некоторого времени стали устанавливать на 3d принтеры:
Теоретически, на цилиндрических линейных двигателях можно реализовать FDM 3d принтер, работающий на поразительных скоростях, очень точный, без вносимых стандартным передаточным трактом (зубчатые ремни, ШВП, винт/гайка и т.д) ошибок, если соответствующим образом позаботиться о высокопроизводительном экструдере и экстремально хорошем охлаждении — например, с применением охлаждающего потока воздуха в -50°C (используя трубку Ранка-Хилша).
Цилиндрические линейные двигатели на постоянных магнитах не следует путать с цилиндрическими линейными асинхронными двигателями, которые работают по другому принципу.

Комментарии (39)

dlinyj
12.04.2022 12:35+2Очень классное решение, даже задумался такой себе собрать. Но у подобного двигателя видится мне один существенный недостаток, ограничивающий его применение. Например в металлорежущих станках, возьмём для примера, плазморез, образуется металлическая взвесь, которая будет с удовольствием примагничиваться к направляющим, тем самым увеличивая их износ.
Поэтому закрытые двигатели намного более просты в этой ситуации.
Однако применение при работе с пластиками, и различными немагнитными материалами может дать много преимуществ. Например, для 3D-принтера может быть уменьшением веса общей конструкции.
В любом случае спасибо за идеи, о такого типа двигателях не задумывался. Я всё более думал об асинхронном линейном двигателе.
abutorin
12.04.2022 12:48+1Но у подобного двигателя видится мне один существенный недостаток
Тоже хотел это добавить. В "классичесом" двигателе основные рабочие повехности закрыты в двигателе и обеспечить их чистоту проще. Хороший пример это направляющий на больших фрезерных станках, на которых приходится городить "шторы".

ASDF59
12.04.2022 13:59+1В 3D принтерах не сильно уменьшит вес конструкции, так как направляющую одной из осей там в любом случае придётся «таскать» над столом, а это значительная часть. Но вот рябь на стенках, возникающую от проскальзывания зубчатых ремней, такой двигатель уберёт.

lgorSL
12.04.2022 12:49Шаговые двигатели способны давать по 200 положений на оборот, при применении в 3д принтере с шестерёнками - дать точность линейного перемещения порядка 0.1 мм.
В линейном двигателе, если я правильно понимаю, потребуется точность в размещении магнитов в 0.1 мм, причём на протяжении всего штока. И не раскрыта тема размера самих магнитов : если в линейном двигателе их размер будет, например, 1 см, то для перемещения штока на 0.1 мм потребуется очень точно управлять током в катушках.

DAN_SEA Автор
12.04.2022 12:54По поводу размера магнитов, надо почитать в диссертации, которую я приложил - там вроде было это...Насчет точности: берем esp32, которая может выдавать ШИМ с частотами в десятки тысяч. И будет всё вполне недурно.

saege5b
12.04.2022 15:07Принтер на линейнике, печатает 720 на 720.
Правда у нас электромагниты везде.

HMNIJP
12.04.2022 17:20+1В линейных двигателях, что применяются в ЧПУ, за точность отвечает оптическая линейка(линейный энкодер с разрешением, например, 0.5мкм) стоящая параллельно оси (так же как в сервоприводах энкодер на валу двигателя), а не устойчивое положение ротора и статора как в шаговиках. Да, естественно драйвер очень точно и с большой частотой управляет током, как и в любом другом сервоприводе переменного тока с замкнутым контуром.
https://www.instagram.com/p/CQbT5qapPW1/?igshid=YmMyMTA2M2Y=

koreec
13.04.2022 07:17200 положений на оборот - это очень старые двигатели и контроллеры. У меня есть промышленный комплект двигатель + контроллер от Applied Motion, который даёт 8 тысяч шагов на оборот. И это без редукторов.

OOOTehnologiiBezopasnosti
13.04.2022 08:59Так ведь в nema двигателях число делений положения не равно числу магнитов. И оно не 200, а сильно меньше, причем кратно 8, как правило - 8, 16, 32... А вот дробные деления - это уже промежуточные положения и зависят от драйвера ШД, некоторые поддерживают до 1/256. Ну, по крайней мере, ТМС различные.
lgorSL
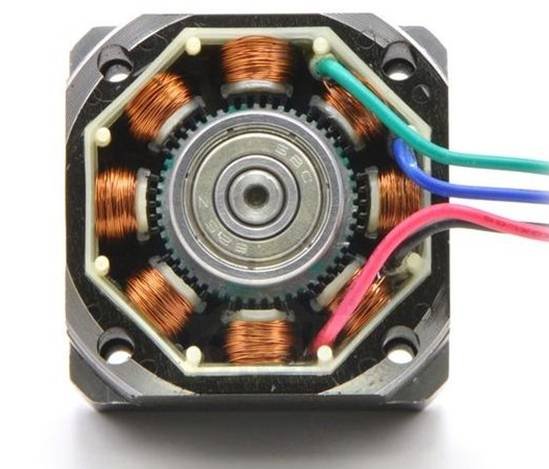
13.04.2022 12:30Я имел ввиду вот такой двигатель:
https://purelogic.ru/data/pics/article/stepper-inside.jpg
Примерно 50 зубьев шестерёнки, две фазы. Одна фаза от другой отличается на половину зубчика (1/100 оборота). Включение двух фаз одновременно даёт промежуточное положение между ними - (1/200 оборота). Возможно, я ошибаюсь в деталях.
Получается, что из коробки, без ШИМ и сложного управления, такой двигатель способен двигаться с шагом в 1/200 оборота, а у линейного двигателя с магнитами из статьи "базовый" шаг будет намного больше и нужны более хитрые подходы.

eandr_67
12.04.2022 14:07+1Ничто не ново под Луной… В PDP-11 позиционирование головок «блинов» (накопители емкостью 2.5 Mb на диск) осуществлялось системой, очень похожей на цилиндрический линейный двигатель. Но без постоянных магнитов — оба цилиндра были электромагнитами. И это 1970-е годы.

Kotofay
12.04.2022 15:22Данный тип двигателя давно уже называется "звуковая катушка".
И не только в PDP-11, но и в IBM PC ставились винчестеры на 120 Мб с точно такой же системой.

Tarakanator
12.04.2022 16:07+3А как дела у свободнопоршневых двигателей с линейными генераторами?
Выглядит перспективно, нет кривошипношатунного механизма(дешево), нет бокового износа (долговечно) поршня, нет ограничений по оборотам из-за высоких нагрузок на кривошипно-шатунный механизм (мощно)
Из того что я читал раньше не взлетело из-за сложностей управления таким двигателем... но ведь электроника шустро развивается, неужто до сих пор проблему не решили?abutorin
12.04.2022 16:14нет кривошипношатунного механизма(дешево), нет бокового износа
(долговечно) поршня, нет ограничений по оборотам из-за высоких нагрузок
на кривошипно-шатунный механизм (мощно)И есть большая разбалансировка если поршень 1, а если 2, то нужно как-то решать вопрос их синхронизации без наличия механической связи.
Tarakanator
12.04.2022 16:211)неужели современная электроника не может решить вопрос синхронизации?
2)зачем нам балансировать двигатель одноцилиндровый двигатель? закрепить его на рельсе и пусть там мотыляется по рельсу влево-вправо. А по другим осям всё сбалансировано.abutorin
12.04.2022 16:31электроника не может решить вопрос синхронизации
Электроника может решить "когда и куда" нужно что-то подвинуть. А вот как это сделать, она уже не поможет.
закрепить его на рельсе и пусть там мотыляется по рельсу влево-вправо
т.к. мы живём не в идеальном мире в одни прекрасный момент этот двигатель на рельсе либо уедет по этому рельсу на расстояние большее чем провод который с него забирает эл-во, либо упрётся в конец этого рельса и начнёт "долбить" по стенкам коробки в которой он расположен. Есть такой предмет в инженерных вузах, ТММ (теория машин и механизмов) на нём как раз учат такие вещи рассчитывать.
Tarakanator
12.04.2022 16:52+2Электроника может решить "когда и куда" нужно что-то подвинуть. А вот как это сделать, она уже не поможет.
Электроника может регулировать количество воздуха, топлива, момент зажигания, силу торможения поршня генератором. Этого более чем достаточно чтобы регулировать частоту хода поршня.
т.к. мы живём не в идеальном мире в одни прекрасный момент этот двигатель на рельсе либо уедет по этому рельсу на расстояние большее
Я думал слабенькая пружина для центрирования двигателя на рельсе настолько сама собой разумеется, что даже не стоит упоминания.
abutorin
12.04.2022 17:07регулировать количество воздуха, топлива, момент зажигания, силу торможения поршня генератором
Это много разных средств воздействия, которые не однородные, сегодня одно топливао, в этом закаулке воздух в котором меньше кислорода и т. д. В теории это конечно возможно, но система получается не менее сложной.
слабенькая пружина для центрирования двигателя
Если она слабенькая, то она ничего не сможте сделать с "болтающимся" поршнем. Пружиной это не ограничится, её сила сопротивления пропорциональная степени сжатия, для "остановки" колебаний этого недостаточно, нужно ещё ставить демпфер, который будет гасить колебания. Но опять же, хороший пример это "простой" ДВС в автомобиле, даже при наличии в нём "балансировки" движения прошней, колебания всёравно часто передаются на корпус. Что уж говорить про систему у которой внутри нет баланса.
В общем сложная очень конструкция получается, в результате пока экономическая выгода такого двигателя не делает его эффективнее чем КШМ.
Tarakanator
12.04.2022 18:15+2Это много разных средств воздействия, которые не однородные, сегодня одно топливао, в этом закаулке воздух в котором меньше кислорода и т. д. В теории это конечно возможно, но система получается не менее сложной.
вы можете выбрать что-то одно.
топливо и воздух меняются одинаково для разных цилиндров.Если она слабенькая, то она ничего не сможте сделать с "болтающимся" поршнем.
А она ничего и не должна сделать с болтанием.
она должна сделать так, чтобы двигатель болтался около средней точкиНо опять же, хороший пример это "простой" ДВС в автомобиле, даже при наличии в нём "балансировки" движения прошней, колебания всёравно часто передаются на корпус.
вот рельса и нужна чтобы не передавалось. В отличии от классического ДВС нам нужно не передавать колебания только в одном направлении. в 2-х других колебаний нет.

iShrimp
13.04.2022 17:41Это много разных средств воздействия, которые не однородные, сегодня одно топливао, в этом закаулке воздух в котором меньше кислорода и т. д.
Уже несколько десятилетий существуют контроллеры инжекторных двигателей, которые умеют автоматически, на ходу, корректировать состав смеси, угол опережения зажигания и т.д.
DAN_SEA Автор
12.04.2022 20:21+3Вполне нормально обстоят дела кстати (дела с линейными электрическими генераторами). Да, всё верно пишут комментаторы, что сложность регулирования и т.д.- но это всё уже давным давно решено, еще в "докомпьютерную" эпоху.
Пруфы с кучей конструкций:
https://www.freikolben.ch/basics-de.shtml
https://www.freikolben.ch/lineargeneratoren.shtmlТойота вроде хотела такой двигатель встраивать в подпол машины (как у Теслы - батарея. Только тут - двигатель). Он очень оборотистый, надежный. Количество выхлопов его таково, что он используется для вращения турбин электрических.
Например, таким способом запитываются расположенные далеко от жилья людей, находящиеся далеко в тайге - промежуточные компрессорные станции, которые поддерживают давление газа в магистральных газопроводах. То есть - чуток газа отбирают из трубы и на нём работает линейный газогенератор, выхлоп которого крутит турбину и питает оборудование станции.
Tarakanator
13.04.2022 11:55в примерах не видно как решили вопрос вибрации, а в одном примере его точно не решили.
С газогенератором не понял. Зачем там линейный двигатель если там всё равно турбина стоит? чем ГТД не устраивает? Или у линейного КПД больше? А выхлоп используют как бесплатную добавку.DAN_SEA Автор
13.04.2022 12:16Насчет КПД, к сожалению, ничего не могу сказать - не знаю. Но вот о таком интересном применении - читал (в качестве газогенератора).

Notevil
13.04.2022 10:09У меня в универе в ВКР была часть с проектированием линейного привода станка. Как раз использовал линейный двигатель. Подробностей не вспомню, но линейный я тогда не выбрал, так как на больших длинах есть проблема с провисанием стержня. Её пытаются решить компромисными путями, размыкают цилиндр и делают П образные катушки. А ещё с плоскими двигателями есть проблема, с тем, что две части пытаются оттолкнуться друг от друга.

{kind=link}
{kind=link}
{kind=link}
abutorin
С винтовой передачей, достаточно просто можно реализовать датчик положения с необходимой точностью. Как с этим обстоят дела с линейным приводом?
И как обстоят дела с силой которую может выдать такой двигатель? Кажется что на чпу фрезер такой поставить будет проблематично.
DAN_SEA Автор
Насчет силы: на плоской версии этого двигателя - движутся электропоезда ;-) . А цилиндрический - это тоже самое что плоский, только лишенный его недостатков. Так что с силой там всё отлично!
Насчет точности: мне тоже был очень интересен этот вопрос, но в понятных величинах (мм, мкм и т.д.) найти не удалось.
Но пишут, что на основе такого принципа построены роботы для поверхностного (smd) монтажа электронных компонентов. Так что, полагаю, точность там на уровне (если датчик положения приделать).
Насчет применения в ЧПУ: весьма активно применяется. Причем цилиндрический гораздо лучше плоского линейного из-за отстутствия паразитного нагрева из-за вихревых токов Фуко (привод греет станину станка, тепловое расширение, всё корёжит. В итоге- неточности в обрабатываемой детали. Цилиндрический - лишен всего этого).
abutorin
Ну на поезде нет таких габаритных ограничений. С "классическим" круглым двигателем когда не хватает момента, можно пожертвовать скоростью, поставить редуктор и "профит".
Всетаки теоритическая механика говорит что прямолинейное движение это частный случай движения по окружности, а не на оборот.
Мне кажется что линейный двигатель хорошо когда нужно большая скорость, но не большая сила (как ваш пример с автоматами по установке эл. компонентов). или когда нужно уменьшить вес "движущейся" части двигателя (пуля, ракета, поезд).
arheops
Только если вам, к примеру, нужно нажатие с силой в 500кг, но НЕ критична так уж скорость, обычным двигателем вы это достигните в обьеме до 10л, а вот сколько займет такой же линейный еще и с нужной точностью?
sim2q
У меня был древний CD-ROM с передвижением по дорожкам на основе линейного (магнитного) двигателя прямого привода. Тяжелый!
dlinyj
Датчик можно сделать оптической системы. У той же винтовой передачи есть энкодер, который может быть магнитным, либо оптическим (может ещё какой системы, которой я не знаю). Ничего не мешает на направляющую нанести соответствующие риски, и считывать их.
DAN_SEA Автор
Тоже вариант. Я бы использовал датчик Холла аналоговый- всё равно же система ездит над "колбасой" с магнитами. Почему бы не воспользоваться их полем, для анализа положения каретки...:-)
Почему аналоговый: он учитывает "градиент" изменения поля. Другими словами, у него не просто констатация факта, как у цифрового "вкл/выкл" - а он может показать, когда едет над магнитом- в начале он, в середине магнита или в конце. И когда один магнит закончился и начался другой...
pvvv
придётся от катушек далеко выносить, иначе будет не датчик положения а датчик тока. железных полюсов нет, только катушки и постоянные магниты — поля хорошо вываливаются наружу.
saege5b
На принтере, такой движок гоняет печатную голову массой килограмм в 50-70. Только вжууух-вжууух стоит. 720 на 720 спокойно выдаёт.
Есть подставить пальцы, отшибает с гематомами на раз.
Проблема больше с подвесом.
В точке ноль стоит индукционный датчик. А далее, считает по шагам.
MaxEkb77
Получить обратную связь можно по линейке, можно тросик до энкодера дотянуть. В ЧПу такая штука не прижилась потому что усилие мелкие.
Обычно их используют во всяких КИМ, и других задачах где нужно большое ускорение.
Возьмите любуе решение на аэростатике то увидите линейные двигателя.
В тех же 3d принтерах вполне возможно, только дорого это будет по итогу и не приживется.