
Прорыв в инженерии, о котором говорит весь интернет. Почему-то на Хабре нет, так что решил рассказать.
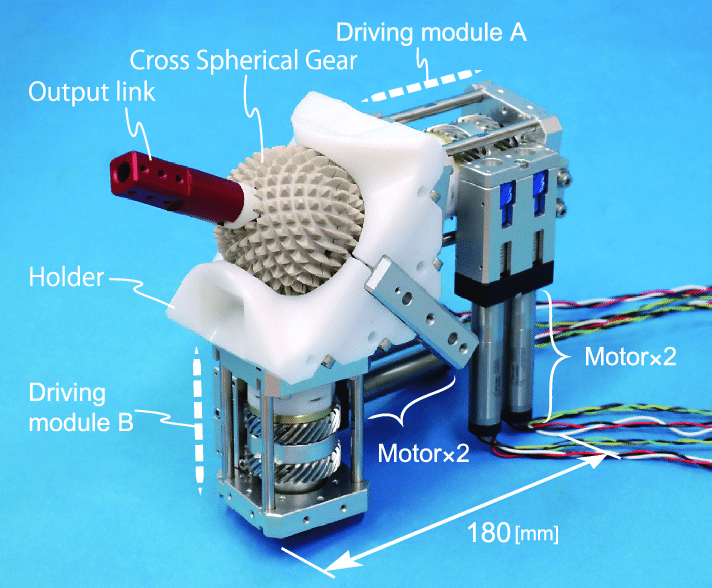
Итак, ABENICS — это Active Ball Joint Mechanism. Проект разработан Университетом Ямагата в Японии, и являет собой специальную сферическую механическую конструкцию для возможных новых сервоприводов с шаровым шарниром. По сути, это новая форма шестеренки, которая стала возможна благодаря развитию технологий и повышению точности производства. Проект, возможно, назван также в честь бывшего премьер-министра Японии Синдзо Абэ.
Принцип работы механизма проще всего понять из видео. Вместо тысячи слов:
На первом этапе видео показано, как при стандартной форме обычной шлицевой шестерни и обычном вращении её вокруг одной оси за счет конструкции механизма ABENICS на выходе получается трехмерное сферическое движение объекта в любом необходимом направлении. Которое при этом очень точно можно контролировать. Все три степени свободы обеспечиваются одной точкой контакта. Между, как ученые их называют, «сферической» шестерней (СS) и «шестерней-монополем» (MP).
Добавив ещё одну MP-шестерню и повторив ту же схему, можно создать сферическую шестерню с несколькими смещенными осями, которая может приводиться в движение двумя или более монопольными шестернями. Сложность итоговой конструкции практически ничем не ограничена. А тем временем умельцы уже делают их в CAD и пытаются напечатать на принтере.
Для тех, кто хочет попробовать, тут нужно отметить, что в последнем случае добиться бесперебойного движения практически нельзя: необходимой точности при принте «зубьев» добиться будет слишком сложно, и конструкция постоянно будет заедать. Максимум можно добиться чего-нибудь такого. Так что домашних роботов с вращающимися человекоподобными суставами нам пока можно не ждать.
Но факт есть факт. Эти новые конструкции зубчатых колес обеспечивают невозможное ранее механическое движение в уютном ламповом форм-факторе шарового шарнира. Один маленький блок решает задачи, на которые раньше требовалось несколько сложных систем. Это может стать огромным прорывом для сферы мобильной робототехники и вообще выпуска любых устройств, в которых нужны компактные универсальные шарниры.
Технические детали
По словам японцев, за прошедшие годы было предложено множество механизмов и приводов, пытающихся решить задачу объединения нескольких степеней свободы в одном механизме (одной контактной поверхности). Классический сферический механизм, в котором для передачи силы используется трение, состоит из сферической шестерни и трех-четырех стратегически расположенных фрикционных колес. Такие классические механизмы допускают неограниченные варианты движения с тремя вращательными степенями свободы,но это довольно сложные конструкции. Кроме того, и в такой передаче много энергии теряется на трение — в том числе из-за необходимости вращать все остальные колеса, даже когда они не задействованы.
В последние годы эта проблема была решена заменой фрикционного колеса на омни-колесо. Оно способно эффективно вращаться в одном направлении и при этом может легко скользить вбок (влево или вправо), то есть у него есть две степени свободы. Но его конструкция тоже является механически довольно сложной. К тому же проскальзывание в омни-колесе препятствует полноценной передаче крутящего момента, а точное позиционирование колеса невозможно без внешних трехмерных датчиков. Все эти проблемы решаются в конструкции ABENICS, к тому же у механизма появляется третья степень свободы.

Другой подход использовал высокочастотные колебания от пьезоэлектрических или магнитострикционных элементов для вращения механизмов. Он допускал широкий диапазон скоростей и компактность конструкции благодаря своей простоте, но не решал вышеуказанных проблем, за исключением точности. Также в разное время предлагались бесконтактные трансмиссионные сферические приводы. Хотя они обеспечивали высокую мощность, они потребляли много электричества и требовали больших вычислительных ресурсов для регулирования движения. К тому же для таких приводов сложно было сконструировать зубчатый редуктор, чтобы передавать высокий крутящий момент на низкой скорости.
Вместо сферической конструкции некоторые исследователи предлагали использовать рычажный механизм со сферическим рычагом. Он мог обеспечить высокую точность позиционирования и отличные динамические характеристики, поскольку исполнительные механизмы могли размещаться в основании системы. Но физические помехи между звеньями ограничивали диапазон движения. Если пытались создать конструкцию с тремя степенями свободы, чем-то приходилось жертвовать — или диапазоном движения, или прочностью механизма, или эффективностью передачи вращения. Чаще всего приходилось допускать большое проскальзывание. То есть точностью движений такие суставы бы не обладали.
Чаще всего в роботах, используемых в промышленности и быту, запястно-плечевой механизм для манипуляторов работает на обычной зубчатой передаче. Которая состоит из нескольких десятков или сотен конических шестеренок. С такой конструкцией мы все знакомы. Но степень свободы там только одна. Так что механизмов в одном «суставе» приходится размещать несколько. Выходная мощность такой конструкции сильно ограничена из-за сложной вложенности вала и наличия осевой нагрузки на коническую шестерню. Больших нагрузок подобный механизм сам по себе не выдерживает, его приходится дополнительно страховать, что ещё сильнее утяжеляет и усложняет конструкцию.
Японские ученые предлагают новый механизм активного шарнира, дополненный взаимодействием сферических шестерен. Он имеет высокую точность движений и достаточную прочность, а также позволяет избежать потерь на лишнем трении. ABENICS использует уникальное взаимодействие между инновационными шестернями, а именно поперечной сферической шестерней (CS) и монопольной шестерней (MP), чтобы достичь трех степеней свободы без проскальзывания.

Механизм, основанный на нескользящем зубчатом зацеплении, как говорят японцы, обеспечивает передачу высокого крутящего момента и надежное позиционирование без использования трехмерных датчиков. Кроме того, поскольку привод и выходное звено могут быть расположены как угодно, механизм может принимать различные конфигурации. А за счет встроенной точности его система управления не требует больших вычислительных ресурсов.
По словам ученых, хотя предлагаемые ими зубчатые «шестеренки» имеют очень сложную форму, они считают, что последние достижения в технологиях производства делают возможным их практическое изготовление, в том числе массовое. Такой механизм позволяет собирать суставы робота в одной точке (т. е. на активном шаровом шарнире), снижая потребление ресурсов и повышая экономичность работы робота.
В тестовом образце шестерни CS и MP были изготовлены из полиэфирэфиркетона (PEEK), супертехнического пластика с высокой смазывающей способностью, обрабатываемостью, прочностью и стабильностью. Держатель был изготовлен из полиоксиметилена (ПОМ), и контактные поверхности зубчатого колеса и держателя при работе не требовали смазки. Основание и корпус устройства производились из легкого и прочного алюминиевого сплава А2017. В тестах этот пластиковый прототип выдерживал вес до 6 кг, не проворачиваясь. Ученые говорят, если сделать сустав из металла, можно достичь куда более высокой прочности.
В общем, вот так.
На Реддите штука собрала рекордные 106 тысяч лайков. В основном народ прогнозирует, как такое устройство можно использовать для замены тазобедренного сустава или суставов руки. Так что можно будет и заменять потерянные конечности более совершенными протезами, и строить более эффективных андроидов. Говорят, идеей уже заинтересовались в Boston Dynamics. Будущее из «Терминатора» становится ближе с каждой минутой.
Так что да, ура! В 21 веке человечество снова изобрело колесо.
НЛО прилетело и оставило здесь промокод для читателей нашего блога:
— 15% на все тарифы VDS (кроме тарифа Прогрев) — HABRFIRSTVDS.
Комментарии (91)

Mishootk
18.01.2023 14:37+1Мне показалось, или за счет смены углов двух монополей можно с одного на другой передавать момент с плавной регулировкой передаточного числа? Т.е. бесступенчатая КПП. Если так, это надежнее вариатора.

NickDoom
18.01.2023 14:52Задумался. Не нашёл ответ. Но появилось подозрение, что передаточное там будет гулять, как у эллиптических передач.
Но, конечно, такая КПП была бы очень интересна, особенно в дициклах — задать ему жёстко соотношение между левым и правым, и оно повернёт. Дицикл — штука такая, если там просто поставить дифференциал и притормаживать левое-правое, первая же лепёшка грязи на дороге притормозит левое колесо сама и каааак кинет на встречку… дициклу нужно пожёстче.

Dynasaur
18.01.2023 16:06+1достаточно каждому колесу иметь свой электропривод
NickDoom
18.01.2023 16:15Ну разве что с колоссальным запасом по крутящему моменту и обратной связью, задающей фиксированную скорость.
С новыми шуруповёртами из-за таких движков есть проблема — они слабенькое нажатие понимают не как «приложи к патрону небольшой момент», а как «любой ценой, сломав сверло, деталь и пальцы, прокрути патрон на небольшой скорости».
Но в дицикле, наверное, такое угробище как раз вот было бы вполне уместно, так что спасибо!

Popadanec
18.01.2023 16:39+2Для этого в любом нормальном шуруповёрте, есть ограничитель крутящего момента.
Выставляешь слабый, если сверло/деталь не внушает доверия и подкручиваешь если надо.NickDoom
18.01.2023 16:49+1Хорошо набитая моторика типа «прибавил-убавил» раньше позволяла не хватать его каждый раз за рыло, переключая трещотку, а теперь, увы…
Да и не всегда можно прервать процесс и схватить его за рыло, ибо трение покоя vs трение скольжения. Часто в процессе добавляешь «на все» при работе с большой длиной, потом в последний момент перед окончанием убавляешь, причём компенсируя нажатием «из последних сил», чтобы не провернуть шлиц…
Возможно, это моё личное — просто сбиты все многолетние навыки и рефлексы работы коллекторниками. Но они не просто сбиты — моторная кора пытается отрастить щупальце и ушатать меня молотком за то, что я схватился за новый «вертак». Стучится изнутри, как пепел Клааса.
Popadanec
18.01.2023 16:53+2Возможно. Я одно время работал монтажником ОПС, видеонаблюдения и подобного. Так набил руку вкручивать саморезы во что угодно без срезания и проворачивания. Трещоткой не пользовался в принципе.

IsKaropki
20.01.2023 10:01Так и есть. Я передел старый шуруповёрт Hitachi: аккумуляторы с NiCd на LiIon, и удивился, что на низких оборотах начинают сильно греться обмотки. Ну и плюс странное ощущение, вами описанное. К слову, новый шуруповерт Metabo, изначально с LiIon аккумуляторами, не грешит ни тем ни другим.
Dynasaur
18.01.2023 18:50+1любой копеечный китайский гироскутер это умеет и не знает как всё сложно :-)
Popadanec
18.01.2023 16:42+1Пока они упираются в неподрессоренную массу. На низких скоростях это ещё работает, но если скорость, хотя бы периодически выше 50-70 км/ч, то это уже неприемлемо.
Машина плохо держит дорогу.

arheops
18.01.2023 14:55+2Ну учитывая необходимую точность скорее всего не получится передавать много, ибо будет износ зубьев и уменьшение точности.
Вариатор и так максимально простой.Mishootk
18.01.2023 15:10+1Недостаток вариатора в том, что в нем износ за счет трения, ну и проблема с передачей большого момента. Чуть поработать под нагрузкой на проскальзывании - полная замена конусов и ремня. Так-то он простой, согласен.
Когда я смотрю на гипоидную передачу в дифференциале (и вообще весь автомобильный дифференциал в сборе) мне тоже кажется это чем-то из области фантастики. Думаю, что дальше дело технологии, отточить форму, количество зубьев для минимального износа и уменьшения шума. Бесступенчатая КПП под высокие моменты - это сильная добавка к существующим авто на ДВС.

elprog74
20.01.2023 10:01Так придумали уже давно бесступенчатую трансмиссию на шестеренках с плавным изменением передаточного числа..
Mishootk
20.01.2023 11:42В этом механизме я вижу потери на притормаживание сбоводно вращающейся шестерни. Этот механизм допустим для станков, где требуется плавный пуск, а затем работа на постоянных оборотах с заранее подобранным передаточным числом КПП. Для автомобиля же постоянный съем мощности с этого свободно вращающегося узла - дикая потеря.
Я раздумывал над подобным механизмом, и единственным приемлемым вариантом было повесить на тормозной выход генератор. Делать съем мощности со второй степени свободы в зарядку батареи гибрида. При наполнении батареи сразу отдавать электричество на электродвигатель переводя движение в гибридный режим.
Только у меня мысленный макет для простоты понимания был построен на базе классического дифференциала. На вход по центру подается мощность от ДВС, один боковой выход на колеса, второй боковой выход на генератор. Подавая ток на внешнюю обмотку (управляющее воздействие по изменению передаточного числа) создаем генерацию на внутренеей, получая тормозящий эффект и увеличение мощности на колесном выходе. На "прямой передаче" управляющий выход на генератор просто блокируется. Но поскольку это обратная зависимость (большие обороты вала в момент перехода), это не блокировка стопом, а подключение этого вала к колесному (т.е. тупо переход в режим, в котором работает обычный межосевой дифференциал).
Моя схема избавлена от гидротрансформатора, всегда в жестком зацеплении. Для оптимизации режимов по всему диапазону скоростей и оборотов ДВС можно скомбинировать с простейшей планетарной трехступкой как в классической гидравлической АКПП.
Popadanec
18.01.2023 16:46+2Сегодня кмк проще отказаться от него и сделать гибрид. Общие потери в современных, чуть ли не такие же как от шрусов/карданного вала + вариатор/коробка.
Стоимость электротрансмиссии уже сравнима с вариатором. Особенно с учётом ресурса.

Bedal
18.01.2023 15:34с какой стати должно меняться передаточное число? Радиусы вращений неизменны, шар ведь.
Mishootk
18.01.2023 15:48Скольжение. Если ось ведомой шестерни стоит параллельно оси вращения шара, то 1:1. Если перпендикулярно, то 1:0 - полное скольжение.
Но, боюсь, такое возможно только на определенных положениях шара. Для гладкого шара с роликовыми приводами такое справедливо. Либо надо хитрое синхронное управление углами шестеренок, либо мне показалось. Для того я и задал вопрос.
Модель, что-ли, распечатать для проверки?
Bedal
18.01.2023 16:12+1откуда скольжение, если это шестерни (шаровая и плоские)? Скольжение поперёк зуба шестерни возможно, но это будут потери, а не изменение передаточного числа.
Говорю ж - это ШРУС на максималках.
NickDoom
18.01.2023 15:49+1Вот и я или плохо смотрел, или не увидел варианта, когда оно катится в итоге не по «экватору» (тому или иному, не знаю, как назвать).

nixtonixto
19.01.2023 21:47Т.е. бесступенчатая КПП. Если так, это надежнее вариатора.
Не надёжней. Машине иногда надо выехать из сугроба, заехать на бордюр… Вариатор до поры прощает рывковые нагрузки, а на таком типе передачи сразу срежет зубья.Mishootk
20.01.2023 11:55В классической АКПП от этого защищает гидротрансформатор.
В любой схеме трансмиссии автомобиля всегда следует предусматривать защиту от стопора на выходе (или от резкого изменения сопротивления). По классике это ложится на плечи механизма сцепления (сухие диски, гидротрансформатор...) В режиме полного зацепления (блокировки сцепления) эту роль выполняет разогнанная масса автомобиля.



mskotyn
18.01.2023 14:50+18Прикольная игрушка, не больше. Основная проблема - износ рабочих поверхностей в результате трения. А это изменение геометрии в зоне контакта, появление зазоров и в результате - потеря точности.
Профиль зуба шестерни проектируется таким образом, чтобы рабочие поверхности не терлись друг об друга, а катились одна по другой.

Wizard_of_light
18.01.2023 15:01+1Да, смущает что при работе возникают ситуации, когда зубья шаровой шестерни скользят вдоль зубьев цилиндрической, но в червячных передачах например от этого тоже никуда не деться, тем не менее их используют.

vconst
18.01.2023 15:03+3Там еще трение об «суставную сумку»
Червячные передачи редко когда передают большой момент, рули у машин уже не делают настолько широкими :)
SunUp
18.01.2023 18:10+5Червячные передачи редко когда передают большой момент
Не мог пройти мимо, вообще-то вполне себе часто передают, обратите внимание на червячный редуктор лифта и прикиньте нагрузки для грузового варианта
vconst
18.01.2023 18:21И правда. Я думал они заглохли во времена изобретения гидроусилителя и других подобных технологий
Bedal
19.01.2023 07:58Червячный редуктор ещё и обладает мощным торможением, если, скажем, привод оборвался. На "крейсерской скорости" всё хорошо, но с превышением скорости потери растут в большой степени.
Так что очень даже применяется.
vconst
19.01.2023 11:53+1Ну да, червячная передача еще и односторонняя. Как ни старайся, а шестерней червяк не провернуть. Этакий механический диод

trunya
19.01.2023 13:30А вот тут вы сильно заблуждаетесь. Просто момент огромный нужен и колоссальные потери, но провернуть реально. https://www.youtube.com/watch?v=8uB9Pq_oZuM
vconst
19.01.2023 14:35Ух Ё!
Это в качестве курьеза «ага, сказали сибирские лесорубы», или оно реально где-то используется в таком качестве?Popadanec
19.01.2023 15:11Это в качестве ложности вашего утверждения.
Popadanec
19.01.2023 15:19Это вы сейчас про себя сказали. Утверждаете что то со знающим видом, но в теме не разбираетесь.
Bedal
19.01.2023 15:29+1У диодов тоже есть обратный ток, так что всё корректно. И он тоже в килораз меньше прямого.
Popadanec
19.01.2023 15:45Диод, если пробивает в обратку, то с необратимым повреждением.
Тут же привели пример что вполне себе крутится без последствий в обе стороны.
Bedal
19.01.2023 16:38+1Во вполне штатном режиме, без пробития - при подаче обратного напряжения обратный ток диода есть. Полупроводникового диода, конечно.
И червячная передача при обратном ходе работает с такими потерями, что попытка увеличить передаваемое усилие приведёт к её поломке (хотя пробоем это не назвать, передача усилия прекратится).
В целом - вполне допустимая аналогия. Особенно, если учесть "этакий" в исходной фразе, что явно указывает на нестрогое соответствие.

zVadim
20.01.2023 08:03Не обязательно. Всё сильно зависит от величины тока. Стабилитрон - это диод с нормированным напряжением пробоя
nixtonixto
20.01.2023 12:07Диод, если пробивает в обратку, то с необратимым повреждением.
Электрический пробой безопасен для большинства полупроводников, кроме полевых и IGBT-транзисторов, полностью обратим, а для некоторых приборов типа стабилитронов, тиристоров, лавинных диодов и транзисторов — является рабочим режимом. Опасен тепловой пробой, который обычно является следствием электрического пробоя.

Jianke
19.01.2023 08:34+1Прикольная игрушка, не больше
А сустав для робота (типа плечевого или тазобедренного), что уже не нужен?

77778888
19.01.2023 10:08решается заменой не? предумотреть разъёмы/узлы для замены блока шестерен? сделать шарик стирающимся а шестерни жескими? ну и про смазку просто не забывать

Exchan-ge
19.01.2023 14:41и в результате — потеря точности.
плюс потеря прочности — «зубья» начнут крошиться

vconst
18.01.2023 14:56+4Офигенно залипательная штука
А на счет 3д-принтеров, они всякие бывают. В том числе и очень точные


gleb_l
18.01.2023 15:21+4Невероятно, что подобная конструкция появилась только сейчас. Правда, как говорил Шерлок Холмс, после того, как решение задачи объяснили, она становится простой ;)

perfect_genius
18.01.2023 18:12+4После этого очевидно, что человек ограничивает свой умственный потенциал, и нейросети будущего смогут выдавать такие гениально простые идеи целым потоком. Будем всё время удивляться как до такого не додумались ранее.

KvanTTT
19.01.2023 04:01+2Вообще это не выглядит простым, хотя, конечно, не передовые технологии 21 века.
Exchan-ge
19.01.2023 14:45+2Невероятно, что подобная конструкция появилась только сейчас.
Да.
Очевидно, что она неоднократно создавалась и отбрасывалась как не пригодная к делу.
А тут — хоп и ютьюб подоспел :)
Красивая визуализация, почти миллион просмотров — вот она и пригодилась, наконец :)

dio_eraclea
19.01.2023 21:49Да ладно, сейчас. Я видел очень похожие патенты:
“Spherical gear,” US9027441B2, 2015
“Spherical robotic shoulder joint,” US5533418A, 1996
В одном случае там только две степени свободы, правда, а в другом немного по-иному реализована третья степень.
И ведь, блин, только сегодня про эту ерунду с коллегами говорил... И вот оно.
Bedal
18.01.2023 15:36+2Ну, ШРУС, продвинутый на степень свободы (и усложнённый с точки зрения требований к материалам). Сейчас качественные материалы более доступны - вот и появилось.

Seydzi
18.01.2023 15:52из-за зазора в стыке двух полусферических шестеренок(?) механизм на видео не слишком то и точно отрабатывает. прям видно как дергается и дрожит.
Dynasaur
18.01.2023 15:55+7На втором видео мухлёж - Шарик устанавливается в позицию когда Driving module 2 не способен зацеплять его зубцы (ось концентрических проточек совпадает с продольной осью модуля и с осью его концентрических проточек). Тут модуль начинает поворачиваться по часовой и вращает шарик. Хотя ему нечем его зацепить - должен проскальзывать.
NickDoom
18.01.2023 16:40Короче, понятно по итогу рассмотрения настоящими инженерами — примечательного в девайсе только его название.
Э. Беникс. Has been eating some вареникs.

roboter
18.01.2023 16:53+1+ Второй шарнир шарик фиксирует, он не должен поворачиваться.Не, пересмотрел. был не прав.

SabMakc
18.01.2023 20:55Там есть чем цеплять - со стороны шара в этот момент просто продольные зацепы, которые шар и проворачивают (а-ля отверткой). "Соска" у шестерни только с одной стороны.
SabMakc
18.01.2023 21:05+2Но вот момент, когда этот модуль 2 проворачивается очень быстро - меня напрягает больше. Это или полностью ненужное движение, или проворот выполняется бесконечно быстро, или шар подклинивает в этот момент на время проворота. На сколько могу судить, это именно что лишнее движение...
Dynasaur
18.01.2023 16:04+2Передача спорная за - на шарике 4 "мёртвых" точки, совпадающих с осями кольцевых проточек. В этих точках шарик не цепляется зубами модулей. И множество движений этому суставу недоступны.





Sergey_Kovalenko
18.01.2023 16:51+2Автор допустил неточность: вращение возможно всегда только по 2 степеням свободы, однако за счет некоммутативности сложения углов поворота шар можно перевести действительно в любую точку трехмерного конфигурационного пространства. Теперь человеческим языком: почти в любом положении этого шарика вы не сможете крутить его только вокруг оси, проходящей через выступающий черенок, а в тех положения, где сможете, не будет доступна в чистом виде какая-нибудь другая степень свободы. Это похоже на то, как вы катаетесь велосипеде по асфальтной площадке: интегрально вы можете приехать в любую точку под любым углом (три степени свободы), но в каждый момент времени движетесь по одномерной дуге только вперед или назад (одна степень свободы).
Dynasaur
18.01.2023 20:24А у нас, в трёхмерном пространстве, вращение возможно по трём осям
Sergey_Kovalenko
18.01.2023 21:36+2Да, но поворачивая тело только вокруг двух осей за несколько поворотов тело можно заставить принять любое положение, в том числе оказаться повернутой вокруг третьей.
vconst
18.01.2023 22:05Там два привода. Они хоть и могут одновременно работать — но это две степени свободы
Dynasaur
18.01.2023 22:18Там всё сложнее. Два привода с двумя степенями свободы - всего 4 степени свободы. Они обеспечивают вращение относительно трёх осей. Но с ограничениями.
Popadanec
18.01.2023 23:56+2Там вообще то четыре независимых электромотора на четыре частично зависимых привода.
В зависимости от положения шара.

svob
18.01.2023 17:58Выглядит круто. Но они, наверное, должны быть не пластмассовыми (к вопросу о принтерах).


hddscan
18.01.2023 22:00+9Это видео из 21-го года, с тех пор ничего кроме этого видео. Видимо не взлетело.



JINR
19.01.2023 10:28Автор (старший?) назвал в честь себя любимого: в самом начале и также в конце ролика есть список авторов.


Exchan-ge
19.01.2023 14:49можно использовать для замены тазобедренного сустава
А этот механизм таки работает без смазки? :)
Exchan-ge
19.01.2023 14:57выходе получается трехмерное сферическое движение объекта в любом необходимом направлении.
Только вот на видео в качестве полезной нагрузки показан грузик на веревочке.
Что вполне подходит для демонстрации принципа работы. Но не более того.
(ну или можно при помощи такого механизма стрелочкой показывать местоположение объекта на трехмерной карте :)

le2
20.01.2023 20:31Примерно в 2009 году я зашел на полудетский фестиваль робототехники Дерипаски в Москве. Выставка предприятий, за одним из абсолютно пустых стендов стоял дядечка, который показывал механизм размером с детский кубик - пальцами крутил две шестеренки - сустав наклонялся либо в одну, либо в другую сторону. Я не механик, но выглядело очень убедительно. Никто не знает, что это за конструкция?
Arnak
Андроиды стали ещё на шаг ближе)