
Пришло время рассказать о стабилизации камеры для коптера, а именно про 3-х осевые подвесы, которые я устанавливал на свой гексакоптер.
Как я говорил ранее, собрать коптер вряд ли выйдет дешевле при отсутствии необходимых знаний. Но амбиции делали свое дело и я решил что пора переходить с сервоподвесов на подвес с бесколлекторными моторами. Они у нас появились относительно недавно и на момент сборки их не было не так уж и много. Посути купить готовый подвес можно было примерно за 20 тысяч рублей. Однако я решил что выйдет дешевле сделать его самому.

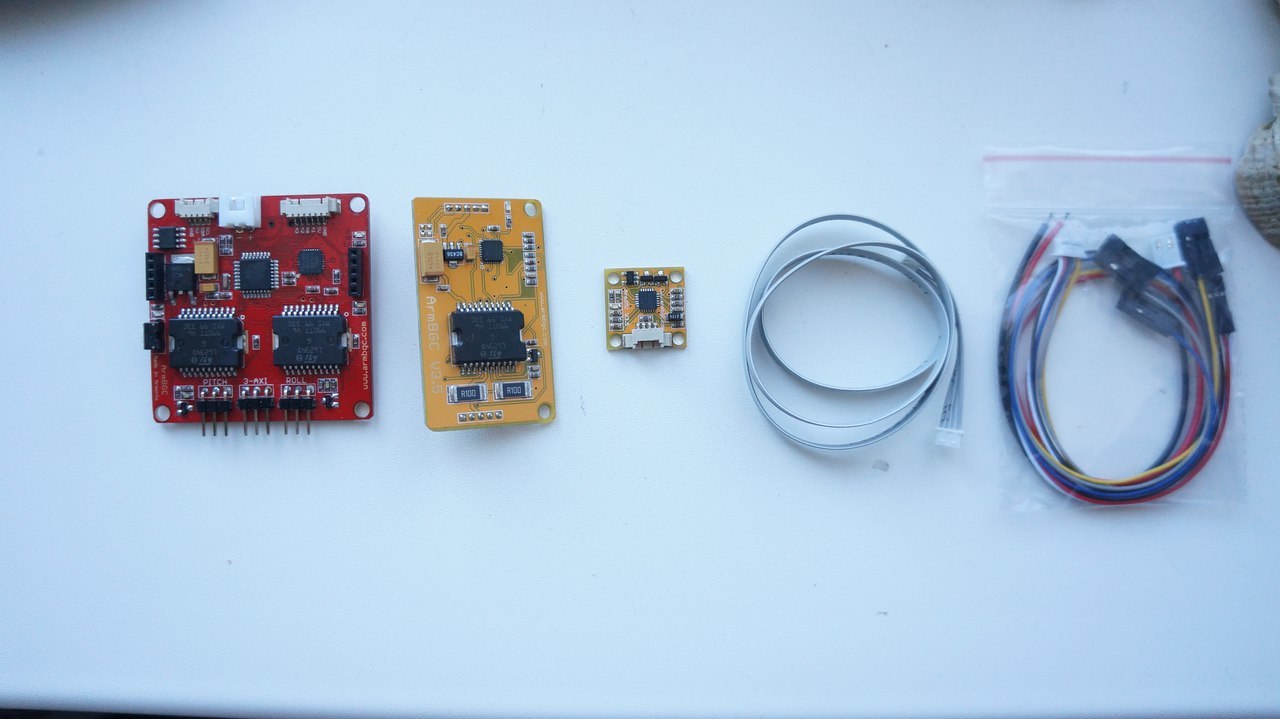
На этот раз я подошел к проекту серьезнее. Спроектировал 3d модель подвеса основываясь на аналогах. Заказал 3 двигателя ipower 4008 150T, карбоновые пластины толщиной 2 мм, контроллер для подвеса на сайте ARMBGC (там он был дороже в 2 раза чем в Китае, но знакомый сказал что он чем-то лучше), и плату виброразвязки (не зная какую брать я взял ту, которая подойдет для зеркалки).
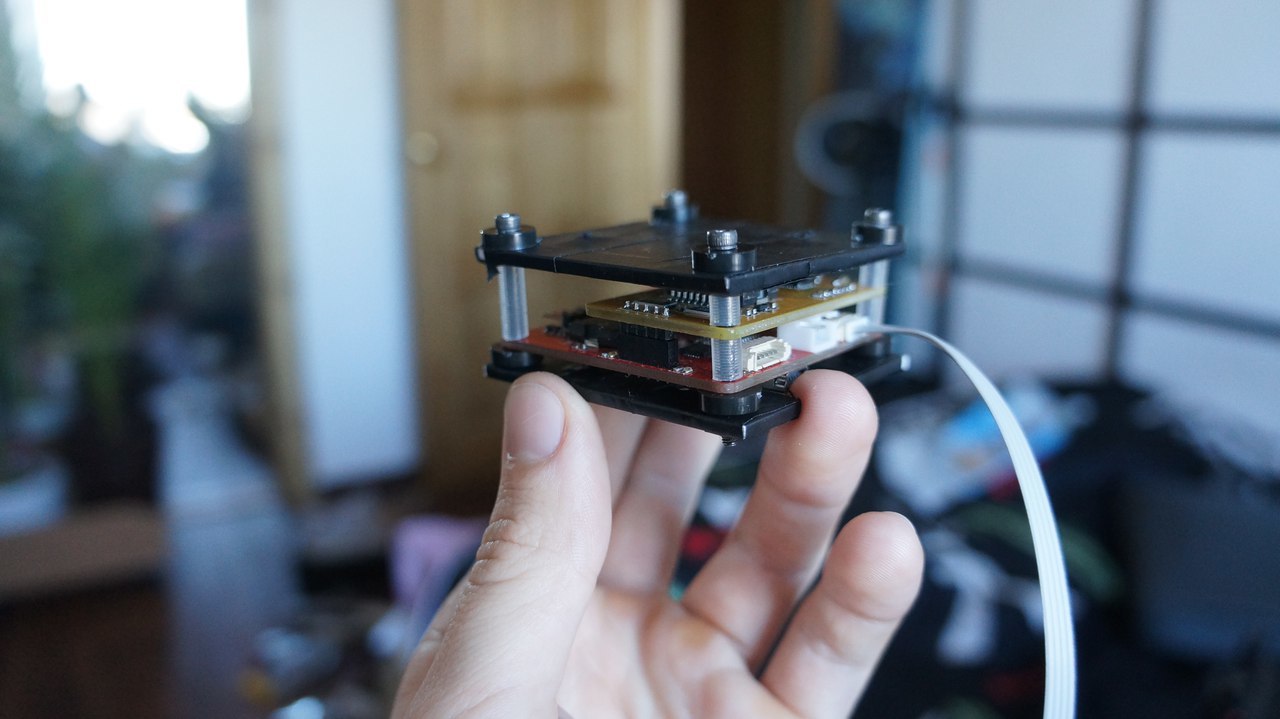
Контроллер представлял собой «красную» основную плату, сенсор, и плату 3-й оси, которая крепилась поверх основной платы ( удобно).
Не имея под рукой станка, все детали вырезались вручную. Тут без комментариев, знаю что это идиотизм. И через некоторое время подвес был готов.

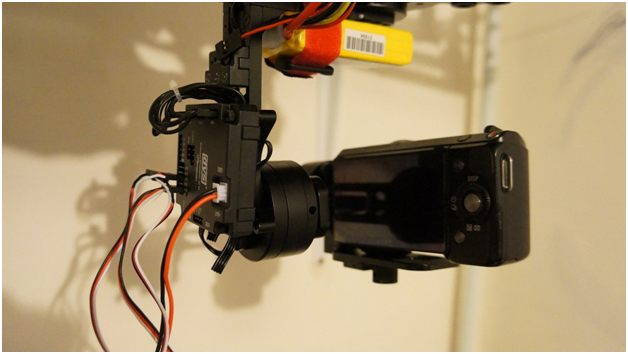
Хотелось чтобы подвес вращался на 360 градусов и шасси не мешали при съемках. Тогда я решил приделать «ноги» к 3-й оси, чтобы они вращались вместе с камерой и не попадали в кадр.

Подвес получился нормальный. Камера хорошо балансировалась и пришло время установки электроники.
Не буду долго останавливаться на подключении и настройке контроллера, так как настройка для каждого подвеса индивидуальная. Скажу лишь то, что двигатели по pitchи roll справлялись со своими задачами относительно хорошо, однако, мотор оси yaw просто не вытягивал всю нагрузку при отклонениях больше 20-30 градусов. Поэтому двигатель 4008 был заменен на 5208 180T.

Кроме того «цельные» ноги очень плохо сказывались на оси yaw, так как всей своей плоскостью сопротивлялись воздуху во время полета и не позволяли нормально работать подвесу.
Стало ясно зачем на «коптерах» ноги делают не цельные а «рамчатые»… только тонкий контур самой ноги. Не желая больше ничего выпиливать решил просто их снять и запускать коптер с рук.
В итоге этот подвес отлетал довольно долго.
Кстати, также комплект подвеса включал в себя AV конвертор для камеры sony nex (т. к. в ней нет аналогового видеовыхода) и переключатель режимов съемки (фото, видео) и приемник для управления подвесом.
Для видеопередачи использовался boscam передатчик на 200 mw

Подвес работал как с 16 мм объективом так и с 16-55… но 50 мм скорее работал для галочки, чем для качества съемки…приходилось сильно стабилизировать программно.
А через некоторое время я решил, что пора покупать другой подвес. Который лучше стабилизирует картинку и чтобы он был легче. Выбор пал на такой 3-х осевой подвес. Незнакомая мне фирма подвеса «MOY». Ну мой, значит мой))
Плюсы подвеса:
1) Компактный размер.
2) Весит 690 грамм (на 600 легче старого подвеса).
3) Закрытые моторы. Это действительно важный показатель, т. к. пыль и грязь реально ухудшают работу подвеса (сравниваю со старым подвесом с открытыми движками).
4) Контроллер в защитном боксе.
5) Отсутствие «правого рычага» подвеса позволяет легко настраивать камеру.
Минусы подвеса:
1) Аккум больше чем 1000mah не подвесить (просто нет места).
2) Идеален для 16 мм объектива, но для 18-55 не хватает чуть-чуть отверстия в крепежной пластине. В итоге камера сваливается вперед при выдвинутом объективе (когда 55 мм). Однако двигатели все равно вытягивают эту разбалансировку в доказательство чего ниже увидите видео без стабилизации, снятое на 50 мм.
3) Отсутствие «правого рычага» подвеса делает фотоаппарат менее защищенным.
В итоге за сравнительно небольшие деньги и отсутствия проблем получил хороший подвес.
И если со старым подвесом гексакоптер летал как груженая баржа, то теперь она очень быстрая и маневренная.
Видео в реальной скорости + 3% стабилизации.
Кстати, пришел подвес довольно быстро (к сожалению ссылку на продавца не дам, т. к. он этот подвес не продает уже) в такой прикольной вот коробке. Почти как айфон. :)

Не могу сказать что это подвес «готовый из коробки» т. к. настроен был всего 1 режим follow mode и не сильно хорошо настроен. В результате дополнительно настроил режимы для разных объективов и добавил возможность управления с пульта. На данный момент ожидаю платку для настройки подвеса по Bluetooth. В результате не придется каждый раз подсоединять провод к контроллеру и подключать к компу. Сразу скажу что заниматься «качественной» настройкой подвеса лучше именно так, потому что пайка usb порта на контроллерах не ахти.
К такому выводу я пришел пока настраивал старый контроллер на старом подвесе. Пока туда-сюда подсоединял шнур, порт отвалился и нечаянно «что-то коротнул». В итоге даже после припайки его обратно компьютер этот контроллер не видел. Причиной этому стал «черный квадратик» на плате. Спасибо продавцу, который согласился бесплатно выслать мне этот квадратик (ведь замена контроллера влетела бы в копеечку). В ремонте мобильников мне его перепаяли за 200р. Вот именно поэтому советую купить такую платку для настройки по Bluetooth, т. к. настройка это дело такое: дома перед зеркалом это работает по одному сценарию, а в полете, когда ориентируешься по горизонту, по-другому.
Сейчас подвес еще не до конца настроен и не требует стабилизации только при полетах в безветренную погоду с 16 мм объективом, и валит горизонт. Решением проблемы завала горизонта (я так понял) является параметр «доверие гирам», но тут тоже нужно знать баланс между качеством и расколбасом моторов. Поэтому на данном этапе не парюсь и жду платку. :)
Хочу заметить что в более современных версиях контроллера Bluetooth уже встроенный, поэтому при заказе это уточните.
Ну и, конечно, вывод:
1) Собрать своими силами подвес так же нелегко как и коптер. Кроме того, в данный момент это просто не целесообразно, т. к. их полно в продаже.
2) Если брать подвес, то только с закрытыми моторами, пыль и грязь очень негативно влияют на их работу (тем более случайная металлическая стружка). Кстати в старом варианте подвеса в двигатель оси yaw частенько попадала металлическая стружка… буквально 2-3 частички, пока туда-сюда закручивал болты, разбирал, собирал и т. д. В результате чего эти частички попадали между ротором и статором двигателя и уменьшали его плавность и создавали «треск». Поэтому если у вас на подвесе двигатель как будто «простреливает», то это указывает на «грязь» в моторах.
3) И еще совет не относящийся к подвесу, а относящийся к конвертору для sony nex. В какой-то момент между пилотом и оператором встает вопрос «общения» на расстоянии. Т. е. если оператор стоит на месте взлета коптера, а пилот ушел немного подальше для лучшего визуального контроля за коптером. Для этой цели у нас есть рации. Однако во время работы на частотах в диапазоне 400 мгц этот конвертор начинает чудить. Картинка с фотоаппарата на мониторе делится на 2 части и меняется местами. Долго не могли понять из-за чего такие чудеса, но потом стало ясно, что это из-за раций.
На этом думаю все. Вроде ничего не забыл рассказать. Видео с коптера увидите ниже, а я пошел писать статью про что-нибудь еще)
И напоследок, итоговый список составляющих моего подвеса:
Итого: 300,84$ за неплохой подвес под беззеркалку, сделанный своими руками.
Или можно купить отличный готовый вариант + Bluetooth модуль:
Итого: 231,33$
p.s. Спасибо Виктору за этот материал и опыт.
На этом всё, с вами был простой сервис для выбора сложной техники Dronk.Ru
Не забывайте подписываться на наш блог, будет ещё много интересного.
Как я говорил ранее, собрать коптер вряд ли выйдет дешевле при отсутствии необходимых знаний. Но амбиции делали свое дело и я решил что пора переходить с сервоподвесов на подвес с бесколлекторными моторами. Они у нас появились относительно недавно и на момент сборки их не было не так уж и много. Посути купить готовый подвес можно было примерно за 20 тысяч рублей. Однако я решил что выйдет дешевле сделать его самому.
На этот раз я подошел к проекту серьезнее. Спроектировал 3d модель подвеса основываясь на аналогах. Заказал 3 двигателя ipower 4008 150T, карбоновые пластины толщиной 2 мм, контроллер для подвеса на сайте ARMBGC (там он был дороже в 2 раза чем в Китае, но знакомый сказал что он чем-то лучше), и плату виброразвязки (не зная какую брать я взял ту, которая подойдет для зеркалки).
Контроллер представлял собой «красную» основную плату, сенсор, и плату 3-й оси, которая крепилась поверх основной платы ( удобно).
Не имея под рукой станка, все детали вырезались вручную. Тут без комментариев, знаю что это идиотизм. И через некоторое время подвес был готов.
Хотелось чтобы подвес вращался на 360 градусов и шасси не мешали при съемках. Тогда я решил приделать «ноги» к 3-й оси, чтобы они вращались вместе с камерой и не попадали в кадр.
Подвес получился нормальный. Камера хорошо балансировалась и пришло время установки электроники.
Не буду долго останавливаться на подключении и настройке контроллера, так как настройка для каждого подвеса индивидуальная. Скажу лишь то, что двигатели по pitchи roll справлялись со своими задачами относительно хорошо, однако, мотор оси yaw просто не вытягивал всю нагрузку при отклонениях больше 20-30 градусов. Поэтому двигатель 4008 был заменен на 5208 180T.
Кроме того «цельные» ноги очень плохо сказывались на оси yaw, так как всей своей плоскостью сопротивлялись воздуху во время полета и не позволяли нормально работать подвесу.
Стало ясно зачем на «коптерах» ноги делают не цельные а «рамчатые»… только тонкий контур самой ноги. Не желая больше ничего выпиливать решил просто их снять и запускать коптер с рук.
В итоге этот подвес отлетал довольно долго.
Кстати, также комплект подвеса включал в себя AV конвертор для камеры sony nex (т. к. в ней нет аналогового видеовыхода) и переключатель режимов съемки (фото, видео) и приемник для управления подвесом.
Для видеопередачи использовался boscam передатчик на 200 mw
Подвес работал как с 16 мм объективом так и с 16-55… но 50 мм скорее работал для галочки, чем для качества съемки…приходилось сильно стабилизировать программно.
А через некоторое время я решил, что пора покупать другой подвес. Который лучше стабилизирует картинку и чтобы он был легче. Выбор пал на такой 3-х осевой подвес. Незнакомая мне фирма подвеса «MOY». Ну мой, значит мой))
Плюсы подвеса:
1) Компактный размер.
2) Весит 690 грамм (на 600 легче старого подвеса).
3) Закрытые моторы. Это действительно важный показатель, т. к. пыль и грязь реально ухудшают работу подвеса (сравниваю со старым подвесом с открытыми движками).
4) Контроллер в защитном боксе.
5) Отсутствие «правого рычага» подвеса позволяет легко настраивать камеру.
Минусы подвеса:
1) Аккум больше чем 1000mah не подвесить (просто нет места).
2) Идеален для 16 мм объектива, но для 18-55 не хватает чуть-чуть отверстия в крепежной пластине. В итоге камера сваливается вперед при выдвинутом объективе (когда 55 мм). Однако двигатели все равно вытягивают эту разбалансировку в доказательство чего ниже увидите видео без стабилизации, снятое на 50 мм.
3) Отсутствие «правого рычага» подвеса делает фотоаппарат менее защищенным.
В итоге за сравнительно небольшие деньги и отсутствия проблем получил хороший подвес.
И если со старым подвесом гексакоптер летал как груженая баржа, то теперь она очень быстрая и маневренная.
Видео в реальной скорости + 3% стабилизации.
Кстати, пришел подвес довольно быстро (к сожалению ссылку на продавца не дам, т. к. он этот подвес не продает уже) в такой прикольной вот коробке. Почти как айфон. :)
Не могу сказать что это подвес «готовый из коробки» т. к. настроен был всего 1 режим follow mode и не сильно хорошо настроен. В результате дополнительно настроил режимы для разных объективов и добавил возможность управления с пульта. На данный момент ожидаю платку для настройки подвеса по Bluetooth. В результате не придется каждый раз подсоединять провод к контроллеру и подключать к компу. Сразу скажу что заниматься «качественной» настройкой подвеса лучше именно так, потому что пайка usb порта на контроллерах не ахти.
К такому выводу я пришел пока настраивал старый контроллер на старом подвесе. Пока туда-сюда подсоединял шнур, порт отвалился и нечаянно «что-то коротнул». В итоге даже после припайки его обратно компьютер этот контроллер не видел. Причиной этому стал «черный квадратик» на плате. Спасибо продавцу, который согласился бесплатно выслать мне этот квадратик (ведь замена контроллера влетела бы в копеечку). В ремонте мобильников мне его перепаяли за 200р. Вот именно поэтому советую купить такую платку для настройки по Bluetooth, т. к. настройка это дело такое: дома перед зеркалом это работает по одному сценарию, а в полете, когда ориентируешься по горизонту, по-другому.
Сейчас подвес еще не до конца настроен и не требует стабилизации только при полетах в безветренную погоду с 16 мм объективом, и валит горизонт. Решением проблемы завала горизонта (я так понял) является параметр «доверие гирам», но тут тоже нужно знать баланс между качеством и расколбасом моторов. Поэтому на данном этапе не парюсь и жду платку. :)
Хочу заметить что в более современных версиях контроллера Bluetooth уже встроенный, поэтому при заказе это уточните.
Ну и, конечно, вывод:
1) Собрать своими силами подвес так же нелегко как и коптер. Кроме того, в данный момент это просто не целесообразно, т. к. их полно в продаже.
2) Если брать подвес, то только с закрытыми моторами, пыль и грязь очень негативно влияют на их работу (тем более случайная металлическая стружка). Кстати в старом варианте подвеса в двигатель оси yaw частенько попадала металлическая стружка… буквально 2-3 частички, пока туда-сюда закручивал болты, разбирал, собирал и т. д. В результате чего эти частички попадали между ротором и статором двигателя и уменьшали его плавность и создавали «треск». Поэтому если у вас на подвесе двигатель как будто «простреливает», то это указывает на «грязь» в моторах.
3) И еще совет не относящийся к подвесу, а относящийся к конвертору для sony nex. В какой-то момент между пилотом и оператором встает вопрос «общения» на расстоянии. Т. е. если оператор стоит на месте взлета коптера, а пилот ушел немного подальше для лучшего визуального контроля за коптером. Для этой цели у нас есть рации. Однако во время работы на частотах в диапазоне 400 мгц этот конвертор начинает чудить. Картинка с фотоаппарата на мониторе делится на 2 части и меняется местами. Долго не могли понять из-за чего такие чудеса, но потом стало ясно, что это из-за раций.
На этом думаю все. Вроде ничего не забыл рассказать. Видео с коптера увидите ниже, а я пошел писать статью про что-нибудь еще)
И напоследок, итоговый список составляющих моего подвеса:
- Карбоновые пластины (18,40$)
- Плата виброразвязки Absorbing Plate A20 W/20 (29,14$)
- Видеоконвертор Sony Nex 5 (32,92$)
- Видеопередатчик Boscam 5.8 RC 305 и 200mw (17,99$)
- Переключатель режимов съемки sLED v2 Sony RC (13,40$)
- Мотор iPower gbm5208-200t — 1 шт. (54,79$)
- Мотор iPower gbm4008-150t — 2 шт. (74.22$)
- Контроллер AlexMos 3-х осевой (59,98$)
Итого: 300,84$ за неплохой подвес под беззеркалку, сделанный своими руками.
Или можно купить отличный готовый вариант + Bluetooth модуль:
- 3х осевой подвес MOY (218,38$)
- Bluetooth модуль для AlexMos 8bit и 32bit (12,95$)
Итого: 231,33$
Дополнительные фотографии



p.s. Спасибо Виктору за этот материал и опыт.
На этом всё, с вами был простой сервис для выбора сложной техники Dronk.Ru
Не забывайте подписываться на наш блог, будет ещё много интересного.
BelBES
А мне вот интересно, если вместо фотоаппарата к коптеру приеделать дополнительных банок аккумулятора, сколько коптер сможет пролетать?
з.ы. ну и интересен вопрос, сколько в таком виде как у вас коптер в воздухе держится?
vasimv
http://www.ecalc.ch/xcoptercalc.php?ecalc&lang=ru
Hertz
На такой здоровом, возможно, выйдет около часа получить. На более мелких довольно быстро достигается точка diminishing returns.
Это всё так, пальцем в небо, но есть коптеры, летающие 50-60 минут. Есть какие-то коммерческие-промышленные, которые могут еще больше.