
Здравствуйте, решил выложить материал отозванной заявки, но только формулу изобретения. ФИПС сместил дату приоритета на месяц, таким образом получился большой разрыв с даты первой публикации - более полугода, и авторское право теперь не защищено никак, а после и вовсе материал начали активно удалять с сети. Но это в общем-то уже и не столь интересно - бодаться с ФИПСами и общественностью. Поэтому представляю материал в виде том - как не надо составлять формулы.
Вообще к работе над идеей сподвигла публикация физиков "Робот капля" по концепции "жидкий робот".
При перечитывании материала сразу бросилась в глаза ошибка при построении предложения:
которое, в условиях эксплуатации, реагирует на определённое воздействие процессом фазового перехода из жидкого состояние в состояние упругого тела
Правильно было-бы такое: "которое, в условиях эксплуатации, на определённое воздействие реагируетпроцессом фазового перехода из жидкого состояние в состояние упругого тела".
В остальном, при прочтении ошибок не обнаружил. Заявку забросил из-за смещения дат приоритета. Заявка была отправлена в ФИПС в январе 2020, а материал был опубликован в первом месяце лета 2019. Поверхностное описание тут, администрации порталов удаляют разные материалы от участников, объясняя это чисткой дискового пространства. Ну тут уж ничего не поделаешь.
Формула изобретения вцелом, та, которую я имею у себя на дисках и в печатном варианте
Hidden text
Способ варьируемого, с сменой режимов, перекачивания жидкой рабочей среды объёмного привода исполнительного механизма, включающий перемещение рабочей среды посредством механического взаимодействия её частиц с действующими на них твердыми поверхностями, варьирование параметрами и смену режимов изменением места взаимодействия контактирующих поверхностей, отличающийся тем, что в качестве основного вещества рабочей жидкой среды, используют вещество, которое, в
условиях эксплуатации, реагирует на определённое воздействие процессом фазового перехода из жидкого состояние в состояние упругого тела в результате усиления когезионного взаимодействия его частиц, и сопутствующим процессом ограниченного расширения, а оказывают это воздействие в области внутри полости, соединяющей откачиваемый объём рабочей среды с подкачиваемым и имеющей на своём протяжении различные участки с поверхностями определённого характера на каждом,
а перекачивание производят в последовательности осуществляемых при этих условиях действий, в которой подвергают её основное вещество этому воздействию, в результате которого оно переходит из жидкого состояния в состояние упругого тела и его расширения , в котором отделяют некоторый рабочий объём, а этим телом разделяют объём откачивания и подкачивания рабочей среды, а энергию затрачиваемую на осуществление этого воздействия, преобразуют в энергию упругой деформации, при сопротивлении расширению этого упругого тела , в ходе его взаимодействия с поверхностями полости , и в механическую в процессе вытеснения поверхностями и скольжения, и высвобождения его энергии упругой деформации на участке, где полость имеет увеличение площади поперечного сечения на своём протяжении в направлении подкачивания, и через это тело осуществляют отток рабочей среды из откачиваемого объёма в области высвобождаемой в процессе его вытеснения, присоединением, этим-же воздействием, к нему в целое свободные частицы её основного вещества, и как пористые включения вспомогательного, и с этого тела осуществляют приток частиц в подкачиваемый объём рабочей среды, после их вытеснения из области этого воздействия и последующем автономном или принудительном переходе в свободное и жидкое состояние, и, в случае противодействия или сопротивления перемещению, этим-же телом и воздействием предотвращаютпоступление частиц рабочей среды из зоны подкачки в зону откачки , а варьирование осуществляют сменой места и размера области воздействия, а смену режимов сменой участков внутри полости , изменяя этим характер взаимодействия тела с различными поверхностями на протяжении полости.
Описание, вресия (в процессе подготовки редактировалась несколько раз) вроде та
Hidden text
« Способ варьируемого, с сменой режимов, перекачивания жидкой рабочей среды объёмного привода исполнительного механизма»
Изобретение относится к области машиностроения, к системам объёмных гидравлических приводов исполнительных механизмов, более точно к способам перекачки рабочей жидкости таковых, реализованных в объёмных насосах.
Результатом применения этих способов становятся устройства, в которых перемещение жидких сред осуществляется посредством цикличного изменения объема камеры занимаемой жидкостью. Камеры попеременно соединяются сначала с входным патрубком насоса, затем с выходным. Цикличность рабочего процесса приводит к порционности и пульсации подачи перекачиваемой жидкости. Давление, в таких системах, так же значительно пульсирует.
Данные системы обладают повышенной герметичностью. Это свойство определено конструкцией в которой реализованы способы. В них напорная гидролиния всегда хорошо отделена от всасывающей. Еще одно важное преимущество данных реализаций - способность к самовсасыванию. При работе во всасывающей гидролинии устройства возникает вакуум, которого достаточно для подъема жидкости до уровня расположения устройства реализации. Давление в напорной линии таких устройств не зависит от подачи. Принято считать, что они обладают жесткой напорной характеристикой.
В то-же время изобретение сочетает в себе эти характеристики с характеристиками вариаторных систем, из которых ближе всего фрикционные вариаторы, в которых параметры передачи зависят от места, на контактируемых элементах, её осуществления.
Задачею изобретения -« Способ варьируемого, с сменой режимов, перекачивания жидкой рабочей среды объёмного привода исполнительного механизма», является расширение области применения, через устранение недостатков и сохранение положительных характеристик, реализаций данных способов, и добавления новых положительных характеристик, необходимых в ряде задач, стоящих перед отраслью производства исполнительных механизмов, в виде характеристик производимых ею устройств.
Решение должно расширить функциональность гидравлических систем объёмных приводов, упростить их конструкцию, управление таковыми, в комплексном использовании как в стационарной, так и мобильной специальной технике, робототехнике, увеличить износостойкость твердотельных деталей, уменьшить зависимость от воздействия факторов внешней среды.
Для достижения решения поставленной задачи заявляемое техническое решение « Способ варьируемого, с сменой режимов, перекачивания жидкой рабочей среды объёмного привода исполнительного механизма» содержит признаки, совокупность которых позволяет решать задачу в целом, опираясь на известные физические явления и новые технологии материалов.
Как технические результаты данного решения, при его реализации в конкретных устройствах, можно отметить следующие:
- отсутствие необходимости системы клапанов, патрубков, коллекторов, рабочей камеры;
-возможность обеспечения постояной работы, отсутствие циклов, скачков давления, лишних моментов инерции;
-наименьшее кол-во деталей задействованных непосредственно в
гидравлической системе;
-низкий ожидаемый, в следствии отсутствия контактирующих твердотельных деталей скольжения и вращения, уровень вибраций и шума;
-возможность управления, непосредственно с устройства реализации способа, жёсткостью взаимодействия — демпфированием при работе исполнительного механизма с более-менее хрупкими объектами его взаимодействия, а так-же режимами работы исполнительного механизма;
-варьирование параметром перекачивания, жёсткости;
-возможность аккумуляции энергии, в ходе работы исполнительного механизма, для дальнейшего её использования;
-возможность исключения момента инерции, жидкой среды, при смене режимов или параметров работы
.
Для достижения решения поставленной задачи заявляемое техническое решение «Способ перекачивания вещества рабочей жидкости гидравлического объёмного привода исполнительного механизма» содержит признаки, совокупность которых позволяет решать задачу в целом, опираясь на:
• условия: известные физические явления, свойства конкретно выбранного или созданного вещества и характера воздействия на него ;
• решение, осуществляемое в этих условиях.
А внедрение технического решения представляется достижимым на уровне современных технологий и материалов.
Для возможности реализации способа подбирается основное вещество рабочей жидкости гидравлической системы — сплав, смесь, раствор и способ воздействия на него, который вызывает, фазовый переход вещества из жидкого состояния в состояние упругого тела в результате усиления когезионного взаимодействия частиц, в сочетании с процессом его расширения. Вещества с подобным эффектом, известным науке эффектом, существуют в природе и могут быть разработаны и синтезированы отдельно.
Способ воздействия может подбираться конкретно под условия эксплуатации и основное вещество рабочей жидкой среды, это может быть воздействие любого характера в отдельности: электрическим током, воздействие облучением, ультразвуком, или комбинированное.
Источник воздействия на среду гидравлической системы может быть как внешним так и внутренним, взависимости от типа и характера воздействия, реализации способа в конкретном устройстве.
Среда рабочей жидкости может содержать добавки, представлять собой эмульсию, наиболее подходящей фракции дисперсии, применяющейся для снижения сил трения или повышения эффекта от воздействия на основное вещество рабочей среды, стимуляции процессов участвующих в процессе перекачивания. Воздействие на основное вещество рабочей жидкой среды осуществляют
в области определённого размера, на участках протяжения полости, соединяющей откачиваемый объём рабочей среды с подкачиваемым, имеющей поверхности различного характера на своём протяжении для осуществления смены режимов и регулировки работы гидравлической системы.
Откачиваемый и подкачиваемый объём жидкой рабочей среды, разделяют этим телом, получаемым в результате этого воздействия на основное вещество. Тело может быть пористым или однородным, в зависимости от состава рабочей среды.
При этом в него заключают некоторый изолированный объём рабочей жидкой среды, выполняющий функцию рабочей камеры. Частицы основного вещества рабочей среды, подвергают в дальнейшем этому воздействию и усиливают между ними когезионное взаимодействие, в сочетании с расширением образованного ими упругого тела, которое при взаимодействии с поверхностями полости, на участке, где площадь её сечения не изменяется и взаимодействие упругого тела с её поверхностями не вызывают его вытеснения, преимущественного в определённом направлении, начинает накапливать энергию упругой деформации, которая в дальнейшем, при перемещении тела в определённом направлении, может быть автономно использована в случае когда нагрузки на исполнительный механизм высоки, а сил взаимодействия тела с его вытесняющими поверхностями недостаточно для мощности исполнительного механизма.
В процессе расширения и высвобождения энергии упругой деформации, телу придают движение в результате его вытеснения поверхностями полости и скольжения по ним, на участке, где её сечение увеличивается в направлении перекачивания жидкой рабочей среды.
В процессе движения тела, оно освобождает некоторую часть полости, в которой производят воздействие и которую занимает жидкая среда из откачиваемого объёма, где частицы основного вещества которого в результате усиления когезионного взаимодействия соединяют с телом в целое.
Частицы основного вещества, покидающие область воздействия в результате движения, возвращаются, автономно или принудительно, в жидкое состояние и освобождают при этом включения тела, и осуществляют приток рабочей жидкой среды в объём подкачки.
Варьируя, в полости, местом области воздействия на рабочую среду и её размерами, выбирают характер поверхностей взаимодействия с телом и осуществляют смену режимов и регулировку параметров работы:
-запорная арматура, при взаимодействии тела с поверхностями играющими роль зацепов;
-накопление, для последующего использования, энергии, в виде энергии упругой деформации, при взаимодействии с поверхностями полости, где она на своём протяжении имеет одинаковую площадь поперечного сечения;
-варьирование жёсткостью взаимодействия и скоростью перекачивания: при работе исполнительного механизма с внешними хрупкими объектами, область воздействия переносят на участке вытеснения тела, где площадь поперечного сечения полости наибольшая, обеспечивая при этом уменьшение жёсткости большей деформацией тела при его малой длине и наибольшей ширине по сечению полости, так как рабочая среда, при появлении нагрузки, своим давлением деформирует тело, продавливая его за пределы области воздействия, в направлении откачиваемого объёма,в котором его частицы, будут возвращаться в объём откачивания, а в образованной, в упругом теле, давлением полости, свободные частицы вещества будут присоединяться к упругому телу, осуществляя внутри него постоянное перемещение частиц в направлении откачиваемого объёма; и при необходимости и отсутствии нагрузки этим-же регулируют скорость потока, так как при наименьшей длине на протяжении канала, силы внутренних напряжений от сил деформации упругого тела будут наименьшими, а большая площадь сечения полости будет пропускать через себя больший объём рабочей среды за один отрезок времени.
Полость соединяющая откачиваемый и подкачиваемый объём может быть образована так-же поверхностями замкнутого объёма среды и подвижного элемента внутри него.
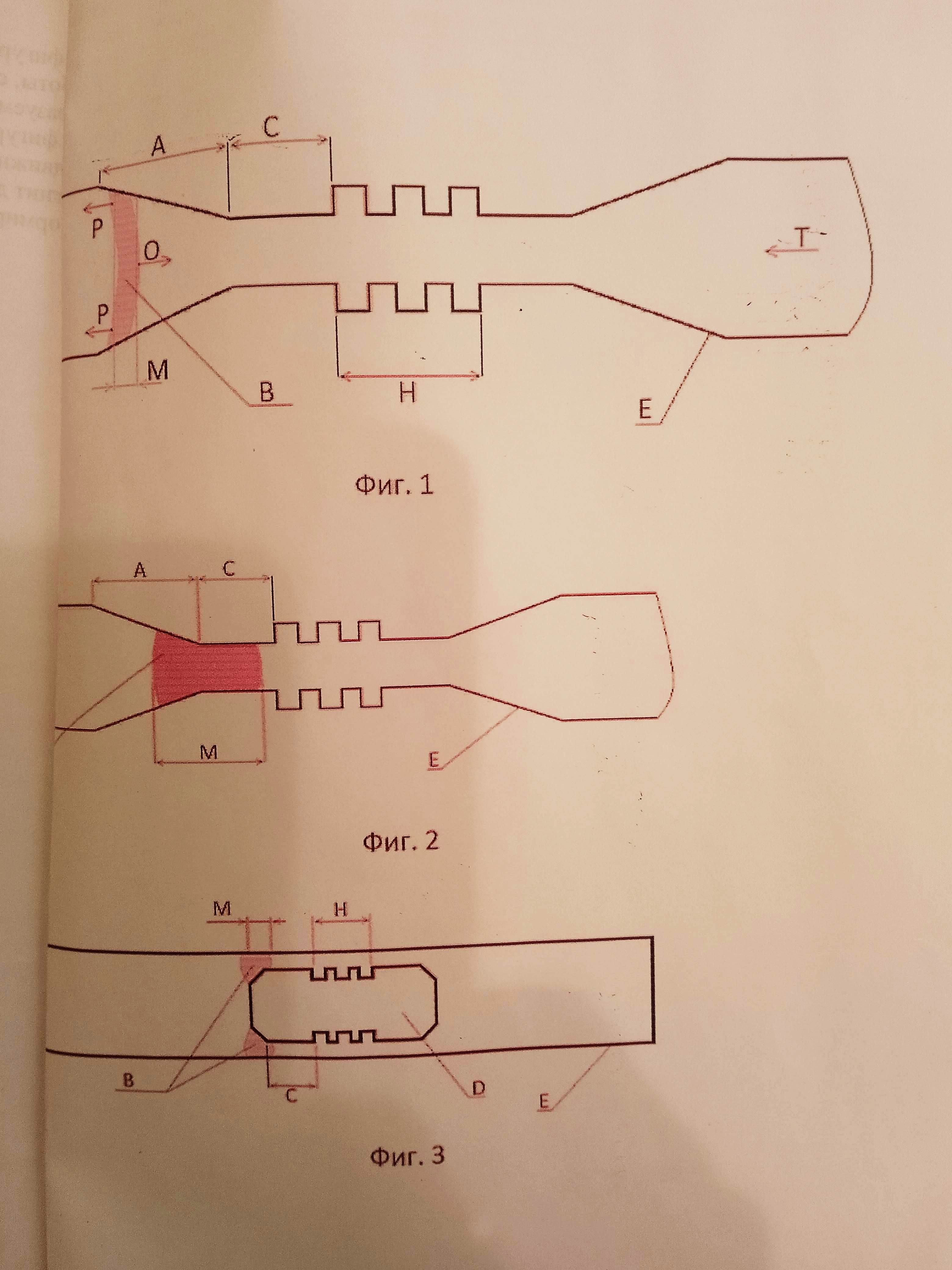
Заявляемой техническое решение поясняется приложенной приблизительной графикой, размеры и пропорции которой не учтены, на которой, при условии, что каждая отдельная фигура отображает в разрезе участок гидравлической системы заполненный жидкой средой -Е, применены следующие обозначения:
К -направление движения жидкой среды в подкачиваемый объём, T — направление движения среды из откачиваемого объёма, А-участок полости, на протяжении которого она увеличивает площадь своего сечения в направлении подкачиваемого объёма, выполняющий функцию вытеснителя упругого тела, С-участок полости, на протяжении которого она не изменяет площади своего сечения, и который используют для накопления энергии упругой деформации в рабочем объёме, М- протяжённость области воздействия на среду, Н- участок полости с поверхностями зацепления, В- упругое тело образуемое, основным веществом рабочей среды, в области воздействия, и с переходящим веществом в жидкое состояние за её пределами, Р и О — направления движения частиц вещества отделяемых от тела.
На фигуре 1 изображён участок гидравлической системы, который отображает систему в режиме пониженной жёсткости.
На фигуре 2 изображён участок гидравлической системы в жёстком режиме работы, с предварительным накоплением энергии упругой деформации в образуемом теле.
На фигуре 3 изображен замкнутый объём в виде заторцованной трубки - Е и подвижной цилиндрической капсулы - D внутри него, например несущей магнит для магнитной подушки внешней каретки. В этом случае упругое тело сформированное веществом рабочей среды будет иметь форму кольца.
Ранее думал что закончу работу над идеей с помощью IT технологий, но проанализировав то, как пишу код и то, что предоставляют производители процессоров - начал понимать что без процессора собственной архитектуры приёдтся очень тяжело. Сейчас отрываюь от своих дел, на которые остатки вечеров, на изучение программирования FPGA.
Если кому интересен номер заявки
Hidden text

Если кому идея зашла - желаю успехов, может им повезёт с защитой авторских прав и поддержкой больше чем мне. Если будете оценивать публикацию - прошу оценивать идею, а не сопровождающие автора обстоятельства.
Комментарии (7)

Kudriavyi
03.12.2023 08:15У мене внутре… гм… не… неонка
Описание 'изобретения' в заявке выглядит немного вот так. А по ссылке написана достаточная ахинея, так как таких изобретений я могу сам нагенерировать три вагона, где будут фигурировать жидкости 'не знаю' и тругие торсионные поля. Не удивительно, что данное важное поделие поудаляли с нескольких ресурсов. Это, конечно, не получение электричества из пальца, но уже близко.
Ну и 'Ларджовый принтер' вызвал у меня приступ испанского стыда

accurate_random Автор
03.12.2023 08:15я могу сам нагенерировать три вагона
Покажите хоть одно. И обязательно составьте формулу на изобретение - способ (согласно правилам патентования изобретения способа). Я терпелив, подожду когда вы изобретёте способ. Только нужный - самое главное, который будет отличаться эффективностью, которую вы раскроете в его описании, а не формуле. В общем ждём от вас чего-то полезного и нового, оформленного по правилам патентования способов.
Не забудьте, при этом, про вами заявленное -
я могу сам
.
Желаю Вам огромных успехов в этом. Буду с надеждой ждать результатов - новое всегда интересно, даже из любознательности.

V_Scalar
03.12.2023 08:15+1Вы больше обсуждаете насколько хорош ваш язык канцеляризма. А где собственно изобретение? Побольше рисунков. чтобы мы могли обсудить работает оно или нет

VladimirNRybin
03.12.2023 08:15Если надо было переставить слово, Вы без труда могли сообщить это эксперту. А на самом деле Вы не подали ходатайство о проведении экспертизы, и заявка была признана отозванной на этом основании. Я так понял, что от проведения экспертизы Вы отказались, предположив, что Вам противопоставят Вашу же публикацию. Но проверить эту гипотезу не удалось, поскольку Вы даже не попытались.
accurate_random Автор
03.12.2023 08:15Нет, заявку я забросил из-за того, что ФИПС сместил дату поступления материала. В начале топик старта указано. То-есть платить нарушителю права за защиту нарушенного права - я не планировал. Это больше не моё и мне это больше не интересно, делать что-то за кого-то я тоже не планировал. У меня есть другие дела и обстоятельства. Поэтому так. Хранить в тайне информацию я не перед кем обязан, поэтому раскрываю её в том виде, как мне удобно в моей ситуации, тем более что я её автор. Не вижу никакого криминала.
DirectX
Для меня всегда патентное право выглядело, скажем так, несколько устрашающе - некоей квинтессенцией того, до чего может дойти юриспруденция, если к ней подключатся инженеры. Все сложносочинённые "патентные формулы" - это вообще ИМХО за гранью добра и зла, ближе к словестной эквилибристике.
Лишь устоявшаяся история намекает, что система должно быть справляется со своими задачами, хотя институт патентных троллей не даёт полной в этом уверенности.
Выскажу мнение, что появление LLM и GPT может встряхнуть это направление и устроить тектонический сдвиг, т.к. нейросети ох как умеют в словоблудие и после прокачивания юридических навыков могут стать атомным оружием в руках патентных троллей.
accurate_random Автор
Я отвечу тем что знаю. Правила патентования зыждятся на основах цивилизации и человеческой речи. За основное взято: формула изобретения должна состоять из одного предложения, или предложения на пункт формулы. Тут всё логично - законченно предложение человеческой речи передаёт смысл и инотонацию (так проще вести патентные споры и защищать право, когда есть определённый чётко предмет понимания), это на всех языках цивилизации, исключения - племена живущие в изоляции.
Словоблудие - это именно то, что умеют чатботы, поэтому вряд-ли кому из патентных троллей они станут полезными, за исключением случаев, на когда в патентные офисы станут намеренно брать не особо грамотных и малообразованных людей.
И кстати, не стоит обвинять патентные ведомства в бедах человечества, это будет выглядеть не обоснованно и предвзято.